視覺(jué)顯著區(qū)域和主動(dòng)輪廓結(jié)合的圖像分割算法
2022-05-17 06:02:08何亞茹葛洪偉
計(jì)算機(jī)與生活 2022年5期
關(guān)鍵詞:模型
何亞茹,葛洪偉+
1.江南大學(xué) 江蘇省模式識(shí)別與計(jì)算機(jī)智能工程實(shí)驗(yàn)室,江蘇 無(wú)錫214122
2.江南大學(xué) 人工智能與計(jì)算機(jī)學(xué)院,江蘇 無(wú)錫214122
圖像分割是實(shí)時(shí)圖像處理的基礎(chǔ)研究?jī)?nèi)容,作為目標(biāo)提取、識(shí)別和跟蹤的預(yù)處理操作,分割結(jié)果的好壞直接影響后續(xù)步驟的判斷。圖像采集過(guò)程中,易受設(shè)備及外部環(huán)境的影響,獲取的圖像往往存在灰度分布不均且邊界模糊的問(wèn)題,圖像分割面臨巨大的挑戰(zhàn)。Kass等人提出主動(dòng)輪廓模型(active contour model,ACM)并首次應(yīng)用于圖像分割中,利用能量最小化原理,為目標(biāo)分割提供平滑的輪廓。由于此類(lèi)模型在處理具有亞像素邊緣的圖像中表現(xiàn)突出,憑借允許嵌入各種先驗(yàn)知識(shí)實(shí)現(xiàn)魯棒分割的優(yōu)勢(shì),在計(jì)算機(jī)視覺(jué)和圖像分割中得到了廣泛的應(yīng)用。
目前主要存在基于邊緣和區(qū)域的主動(dòng)輪廓模型。前者主要依賴(lài)圖像梯度信息定義邊緣停止函數(shù),在梯度大的位置曲線(xiàn)停止演化,捕捉目標(biāo)邊界。測(cè)地主動(dòng)輪廓(geodesic active contour,GAC)模型為具有代表性的基于邊界主動(dòng)輪廓模型,該模型在高質(zhì)量圖像中取得精確的分割結(jié)果,但對(duì)噪聲敏感且不適合弱邊緣的提取。后者主要利用區(qū)域統(tǒng)計(jì)信息構(gòu)造驅(qū)動(dòng)力,引導(dǎo)曲線(xiàn)演化至目標(biāo)邊界。根據(jù)區(qū)域統(tǒng)計(jì)信息類(lèi)型的不同分為基于全局、局部的主動(dòng)輪廓模型。基于全局的主動(dòng)輪廓模型中具有代表性的為CV(Chan-Vese)模型,該模型基于圖像由兩個(gè)同質(zhì)區(qū)域組成的假設(shè),能夠有效分割同質(zhì)圖像。Zhang等人在CV 模型的基礎(chǔ)上提出符號(hào)壓力函數(shù)(signed pressure function,SPF),該函數(shù)能夠有效阻止輪廓曲線(xiàn)在弱邊緣和模糊邊緣處的運(yùn)動(dòng),檢測(cè)目標(biāo)邊界。然而,上述兩種模型,難以準(zhǔn)確捕捉灰度不均圖像的目標(biāo)邊界。為了解決這一問(wèn)題,Li 等人引入高斯核函數(shù)來(lái)統(tǒng)計(jì)圖像局部信息,提出RSF(region-scalable fitting)模型,從而克服全局模型無(wú)法分割灰度呈非均勻變化圖像的缺點(diǎn),但該模型對(duì)初始化的設(shè)置極其敏感,易出現(xiàn)錯(cuò)誤的分割結(jié)果。鑒于對(duì)基于全局和局部?jī)煞N模型優(yōu)缺點(diǎn)的分析,許多研究學(xué)者嘗試將兩種模型結(jié)合,提出一系列混合模型。Wang 等人引入全局能量項(xiàng),吸引演化曲線(xiàn)向目標(biāo)附近靠攏。同時(shí),利用局部能量項(xiàng)進(jìn)一步驅(qū)動(dòng)演化曲線(xiàn)到達(dá)目標(biāo)邊界,該模型在灰度分布較為簡(jiǎn)單的圖像中表現(xiàn)較好,但由于模型中的全局項(xiàng)無(wú)法在灰度呈分布不均勻圖像中有效識(shí)別目標(biāo)邊界,因此即便調(diào)節(jié)全局項(xiàng)權(quán)重系數(shù)也難以得到滿(mǎn)意的結(jié)果。趙杰等人通過(guò)設(shè)計(jì)雙核函數(shù)來(lái)提取局部信息,并使用改進(jìn)的全局項(xiàng)加以輔助,提出的混合區(qū)域主動(dòng)輪廓模型從模糊C 均值聚類(lèi)算法(fuzzy C-means algorithm,F(xiàn)CM)中獲取目標(biāo)先驗(yàn)信息,自動(dòng)設(shè)置初始化輪廓。Ding 等人提出優(yōu)化LoG(Laplacian of Gaussian)能量項(xiàng),作為一種全局檢測(cè)方法,與RSF 模型相結(jié)合,降低模型陷入局部極值的可能。然而,此模型仍需人工設(shè)置初始化輪廓,當(dāng)輪廓曲線(xiàn)遠(yuǎn)離目標(biāo)邊界時(shí),演化曲線(xiàn)易受背景干擾,收斂速度緩慢,且局部項(xiàng)的設(shè)計(jì)僅考慮局部空間信息,無(wú)法全面衡量局部鄰域點(diǎn)對(duì)中心點(diǎn)的影響程度,導(dǎo)致模型在待分割目標(biāo)弱邊緣處易發(fā)生泄漏,降低模型的分割精度。
復(fù)雜場(chǎng)景中,僅使用主動(dòng)輪廓模型往往難以得到理想的分割結(jié)果。陶永鵬等人通過(guò)提取CT 圖像的SIFT(scale invariant feature transform)特征,再利用加權(quán)隨機(jī)森林回歸算法獲取椎骨中心點(diǎn)位置,將其作為CV 分割模型的初始輪廓位置。該方法在自動(dòng)定位方面具有一定的優(yōu)勢(shì),但無(wú)法獲取待分割目標(biāo)形狀先驗(yàn)信息。Li 等人提出了一種將模糊C 均值聚類(lèi)與水平集方法相結(jié)合的算法。其中,水平集函數(shù)的初始化直接從模糊C 均值聚類(lèi)中獲取,并且從模糊聚類(lèi)的結(jié)果中估計(jì)水平集演化的參數(shù),減少了人工操作。Yang 等人使用類(lèi)似的思想,將模糊聚類(lèi)的結(jié)果作為初始約束信息,通過(guò)動(dòng)態(tài)約束項(xiàng)將水平集方法與模糊聚類(lèi)相結(jié)合,提出新的能量泛函。但由于聚類(lèi)算法在復(fù)雜自然圖像中表現(xiàn)欠佳,導(dǎo)致主動(dòng)輪廓模型獲取的初始值具有不準(zhǔn)確性,從而影響模型的分割結(jié)果。視覺(jué)顯著區(qū)域檢測(cè)算法是當(dāng)前計(jì)算機(jī)視覺(jué)領(lǐng)域的一大研究熱點(diǎn)。Fu 等人提出基于簇的視覺(jué)顯著性檢測(cè)算法,通過(guò)定義各簇對(duì)應(yīng)的對(duì)比度測(cè)度和空間測(cè)度,來(lái)衡量各簇的顯著值,并以非線(xiàn)性方式將兩個(gè)測(cè)度融合,得到最終顯著圖。該模型簡(jiǎn)單、高效,獲取的目標(biāo)邊界清晰,能夠在灰度呈不均勻分布的醫(yī)學(xué)圖像或自然圖像中較好地提取視覺(jué)顯著區(qū)域。Yuan 等人結(jié)合回歸校正和正則化隨機(jī)游走排序算法,輸出更平滑、準(zhǔn)確的顯著圖。但此類(lèi)模型僅能定位目標(biāo)顯著區(qū)域,難以將目標(biāo)完全分割出來(lái)。
針對(duì)主動(dòng)輪廓模型用于圖像分割時(shí),演化曲線(xiàn)受背景干擾,演化速度緩慢,且易在弱邊緣處發(fā)生泄漏,難以保留目標(biāo)完整性的問(wèn)題,本文根據(jù)每個(gè)簇的緊湊性定義緊湊對(duì)比度測(cè)度,與空間測(cè)度相結(jié)合,利用改進(jìn)顯著性檢測(cè)算法對(duì)原始圖像進(jìn)行預(yù)處理操作,提取目標(biāo)候選區(qū)域,自動(dòng)設(shè)置初始化輪廓,并將獲取的目標(biāo)先驗(yàn)信息用于優(yōu)化LoG 能量項(xiàng)的符號(hào)選取,自適應(yīng)決定曲線(xiàn)演化方向;其次,引入局部窗口內(nèi)鄰域灰度信息的變化,設(shè)計(jì)局部灰度測(cè)度,與局部核函數(shù)相結(jié)合,改進(jìn)局部能量項(xiàng),更為全面地衡量局部窗口內(nèi)鄰域像素點(diǎn)對(duì)中心點(diǎn)的影響權(quán)重,提高模型在目標(biāo)弱邊緣處的敏感程度。此外,本文模型增加長(zhǎng)度項(xiàng)和距離正則項(xiàng),用于平滑輪廓曲線(xiàn),避免重新初始化。該模型無(wú)需人工設(shè)置初始化輪廓,并且提升了在目標(biāo)弱邊緣處的捕獲能力,取得了更為理想的分割效果。
1 主動(dòng)輪廓模型簡(jiǎn)介
1.1 RSF 模型
Li 等人通過(guò)定義局部擬合項(xiàng)用于分割灰度分布不均勻圖像,提出局部尺度可控的RSF 模型。對(duì)于圖像域內(nèi)任意像素點(diǎn),定義基于水平集函數(shù)的局部擬合項(xiàng),由式(1)給出:
式中,f()為像素點(diǎn)處的局部外(內(nèi))擬合均值;、為權(quán)重系數(shù),均為正數(shù);δ為高斯核函數(shù),控制局部窗口內(nèi)鄰域像素點(diǎn)處灰度值()對(duì)中心像素點(diǎn)處的影響程度;(·)為亥維賽函數(shù)。
RSF 模型能夠有效分割灰度呈非均勻變化的圖像,但由于該模型的局部化特性,導(dǎo)致其對(duì)初始化輪廓的設(shè)置敏感,曲線(xiàn)演化易陷入局部極值,無(wú)法準(zhǔn)確定位目標(biāo)邊界,極大程度上限制了該模型的應(yīng)用。
1.2 ACML 模型
傳統(tǒng)LoG 算子對(duì)灰度變化十分敏感,在含噪圖像中,零交叉點(diǎn)易被判為錯(cuò)誤邊緣點(diǎn),構(gòu)建的能量項(xiàng)用于分割時(shí),易出現(xiàn)“孤島”區(qū)域。為了解決此問(wèn)題,Ding 等人提出基于圖像的優(yōu)化LoG 能量項(xiàng),用于平滑同質(zhì)區(qū)域,保持邊緣信息,與僅由高斯核函數(shù)定義的局部能量項(xiàng)相結(jié)合,構(gòu)建混合模型,本文稱(chēng)其為ACML(active contour model based on optimized LoG and RSF model)模型,降低演化曲線(xiàn)陷入局部極值的可能性。
首先,使用變量來(lái)表示優(yōu)化后的LoG 算子,定義能量泛函,如式(2)所示:

其次,假設(shè)待分割目標(biāo)灰度均值大于背景灰度均值,并使用Ω表示演化曲線(xiàn)包圍的內(nèi)部區(qū)域,并用優(yōu)化后的變量代替文獻(xiàn)[20]中傳統(tǒng)LoG 算子,構(gòu)建能量泛函:

最后,使用θ表示全局項(xiàng)系數(shù),結(jié)合式(1)、式(3),定義外部能量約束項(xiàng):

該模型一定程度上避免曲線(xiàn)陷入局部極值。然而,該模型仍需人工設(shè)置初始化輪廓曲線(xiàn),當(dāng)初始化輪廓設(shè)置遠(yuǎn)離真實(shí)目標(biāo)邊界時(shí),曲線(xiàn)容易受背景干擾,演化速度緩慢,且由于局部能量項(xiàng)僅考慮空間信息,使ACML 模型易在弱邊緣處發(fā)生泄漏,影響模型分割精度和效率。
2 基于視覺(jué)顯著區(qū)域的初始輪廓提取算法
本文結(jié)合視覺(jué)顯著性檢測(cè)方法獲取目標(biāo)形狀先驗(yàn)信息,作為形狀約束引入主動(dòng)輪廓模型中,提出一種基于視覺(jué)顯著區(qū)域的初始輪廓提取算法(initial contour based on visual salient regions,ISR),自動(dòng)設(shè)置初始化輪廓曲線(xiàn),消除人工干預(yù),初始輪廓曲線(xiàn)于目標(biāo)邊界附近開(kāi)始演化,避免背景干擾,提高模型分割的精度和效率。
2.1 基于簇的視覺(jué)顯著區(qū)域提取
本文采用基于簇的視覺(jué)顯著性檢測(cè)算法獲取目標(biāo)先驗(yàn)信息,并根據(jù)各簇的緊湊性對(duì)該算法進(jìn)行改進(jìn)。首先,使用聚類(lèi)算法將圖像中像素點(diǎn)聚類(lèi)為個(gè)簇,通過(guò)統(tǒng)計(jì)簇內(nèi)各像素點(diǎn)到圖像中心的空間距離,并比較簇C與其他簇(非簇C)之間的差異性,同時(shí)考慮每個(gè)簇的空間分布,分別定義空間測(cè)度ω(C)和緊湊對(duì)比度測(cè)度ω(C)。其次,以非線(xiàn)性方式融合兩個(gè)測(cè)度,獲取各簇對(duì)應(yīng)的顯著值。而后根據(jù)每個(gè)簇的顯著值得到簇中各像素點(diǎn)對(duì)應(yīng)的顯著值。
分別定義空間測(cè)度ω(C) 和對(duì)比度測(cè)度ω(C)來(lái)表示各簇到圖像中心的空間距離以及各簇之間的差異性,如式(5)、式(6)所示:

為了更好地抑制背景干擾,獲取圖像顯著區(qū)域,文獻(xiàn)[21]指出顯著目標(biāo)通常具有緊湊的空間分布,而背景區(qū)域較分散。本文將此概念延伸到簇,利用簇內(nèi)的各像素點(diǎn)到該簇中心位置的空間距離定義緊湊對(duì)比度測(cè)度,有效抑制背景干擾。首先計(jì)算圖像域中基于簇的對(duì)比度測(cè)度顯著值均值,如下所示:

其中,表示聚類(lèi)簇?cái)?shù);使用來(lái)表示簇內(nèi)各像素點(diǎn)到該簇的中心位置的空間距離,并將其歸一化為[0,1]。定義如下:


式中,<,本文所有實(shí)驗(yàn)=0,=1。
采取非線(xiàn)性方式融合兩種測(cè)度,獲得更為精確的視覺(jué)顯著區(qū)域,如式(10)所示:

式中,(C)表示簇C顯著測(cè)度值,每個(gè)像素點(diǎn)屬于簇C的顯著性似然滿(mǎn)足高斯分布,定義如下:

式中,v表示像素的特征向量;μ表示簇C的聚類(lèi)中心;σ表示標(biāo)準(zhǔn)差。最后獲取每個(gè)像素點(diǎn)對(duì)應(yīng)的顯著值,如式(12)所示:

圖1(a)中給出一幅X-Ray 血管原始圖像,圖1(b)、(c)給出對(duì)比度測(cè)度與緊湊對(duì)比度測(cè)度圖,再分別與空間測(cè)度以非線(xiàn)性方式相結(jié)合,獲取顯著圖與緊湊顯著圖,圖1(e)、(f)分別給出其對(duì)應(yīng)的二值圖與緊湊二值圖,再進(jìn)一步利用形態(tài)學(xué)操作濾除孤立區(qū)域,獲取更為準(zhǔn)確的目標(biāo)形狀先驗(yàn)信息。不難看出,使用改進(jìn)后的對(duì)比度測(cè)度獲取的目標(biāo)先驗(yàn)信息更加準(zhǔn)確,依此設(shè)置的初始化輪廓曲線(xiàn)能更好定位目標(biāo)位置,如圖1(d)中綠色曲線(xiàn)所示。
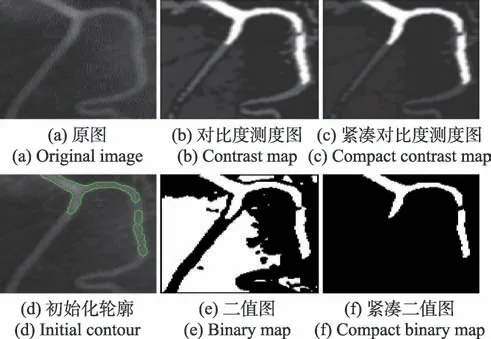
圖1 對(duì)比度測(cè)度改進(jìn)前后效果Fig.1 Effect of contrast measure before and after improvement
2.2 初始輪廓提取算法
本文結(jié)合改進(jìn)視覺(jué)顯著性檢測(cè)算法,獲取目標(biāo)形狀先驗(yàn)信息,提出基于視覺(jué)顯著區(qū)域的初始化輪廓提取算法ISR,步驟如下:
1.使用聚類(lèi)算法將圖像聚類(lèi)為個(gè)簇;
2.for←1 todo
根據(jù)式(5)計(jì)算簇的空間測(cè)度ω(C);
根據(jù)式(6)~(9)計(jì)算簇C的緊湊對(duì)比度測(cè)度ω(C);
end
3.根據(jù)式(10)融合兩個(gè)測(cè)度,得到各簇對(duì)應(yīng)的顯著值;
4.for←1 todo
根據(jù)式(12)獲得圖像每個(gè)像素點(diǎn)對(duì)應(yīng)的顯著值;
end
5.根據(jù)步驟4 獲取待分割圖像的視覺(jué)顯著區(qū)域,再利用閾值將獲取的顯著圖分割為二值化圖像,當(dāng)部分目標(biāo)錯(cuò)分為背景或部分背景錯(cuò)分為目標(biāo)時(shí),構(gòu)成圖像的兩部分(目標(biāo)和背景)灰度差別越小,反之越大。使用最大化類(lèi)間方差法來(lái)計(jì)算最優(yōu)閾值。將顯著值大于閾值的,標(biāo)簽記為1;將顯著值小于此閾值的,標(biāo)簽記為0,得到二值圖像,對(duì)二值化圖像進(jìn)行形態(tài)學(xué)操作,濾除噪聲,將處理后得到的最終二值化圖像分界線(xiàn)作為初始演化輪廓曲線(xiàn)。
視覺(jué)顯著區(qū)域的有效提取,能夠提供準(zhǔn)確的目標(biāo)先驗(yàn)信息,為后續(xù)操作步驟提供可靠依據(jù)。本文在提取視覺(jué)顯著區(qū)域特征時(shí),不局限于某一特定的聚類(lèi)算法,通過(guò)實(shí)驗(yàn)測(cè)試并分析means++、FCM、均值漂移(Mean shift)算法三種較為經(jīng)典的聚類(lèi)算法在提取視覺(jué)顯著區(qū)域時(shí)的優(yōu)劣性。
圖2(a)~(c)分別給出嵌入means++、FCM、Mean shift聚類(lèi)算法的視覺(jué)顯著區(qū)域檢測(cè)算法所獲取的初始化輪廓(綠色曲線(xiàn))。前兩種聚類(lèi)算法均需人工給出聚類(lèi)簇?cái)?shù),means++算法高效率,易實(shí)現(xiàn),且在改進(jìn)對(duì)比度測(cè)度的作用下,降低了對(duì)聚類(lèi)簇?cái)?shù)的敏感程度。由圖2(a)可以看出,在醫(yī)學(xué)和自然圖像中均表現(xiàn)較好。FCM 聚類(lèi)算法以隸屬度來(lái)衡量每個(gè)數(shù)據(jù)點(diǎn)屬于各簇的可能性,在背景分布相對(duì)簡(jiǎn)單的醫(yī)學(xué)圖像中獲取較為精確的視覺(jué)顯著區(qū)域,而在背景相對(duì)復(fù)雜且與目標(biāo)強(qiáng)度值相近的自然圖像中,難以將像素點(diǎn)準(zhǔn)確歸類(lèi),如該算法在小船圖像中的分割結(jié)果所示。Mean shift聚類(lèi)算法雖無(wú)需人工給出聚類(lèi)簇?cái)?shù),但引入了帶寬參數(shù),當(dāng)帶寬大小設(shè)置不合理,收斂速度慢,無(wú)法準(zhǔn)確地提取視覺(jué)顯著區(qū)域。綜合上述分析,本文實(shí)驗(yàn)均選取means++算法來(lái)獲取視覺(jué)顯著區(qū)域,其中簇?cái)?shù)為5。
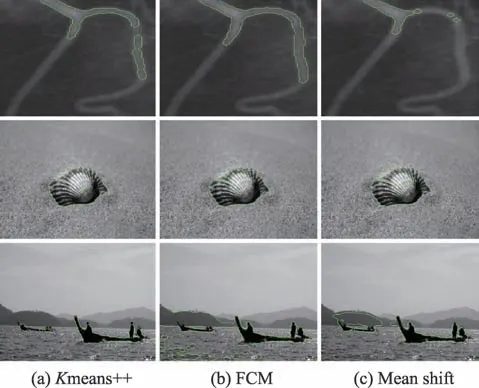
圖2 使用不同聚類(lèi)算法得到的初始化輪廓Fig.2 Initial contour obtained by different clustering algorithms
3 基于混合區(qū)域的主動(dòng)輪廓分割模型
本章首先引入優(yōu)化變量來(lái)代替?zhèn)鹘y(tǒng)LoG 算子,構(gòu)建基于圖像全局信息的優(yōu)化LoG 能量項(xiàng),改善傳統(tǒng)LoG 算子對(duì)灰度變化敏感的問(wèn)題,并結(jié)合由顯著性檢測(cè)獲取的目標(biāo)先驗(yàn)信息,設(shè)計(jì)自適應(yīng)符號(hào)函數(shù),對(duì)優(yōu)化LoG 能量項(xiàng)進(jìn)行加權(quán),自行追蹤目標(biāo)邊緣方向;其次,設(shè)計(jì)局部灰度測(cè)度,與高斯核函數(shù)相結(jié)合,改進(jìn)局部能量項(xiàng),更加充分地衡量局部鄰域像素點(diǎn)對(duì)中心點(diǎn)的影響權(quán)重,提高模型對(duì)目標(biāo)弱邊緣的敏感程度。此外,引入長(zhǎng)度項(xiàng)與距離正則項(xiàng),用于平滑輪廓,避免水平集重新初始化,提出新的基于區(qū)域的混合主動(dòng)輪廓模型(region based hybrid active contour model,RBHM)。
3.1 自適應(yīng)符號(hào)函數(shù)加權(quán)的優(yōu)化LoG 能量項(xiàng)
假設(shè)圖像由兩部分區(qū)域組成,且待分割目標(biāo)灰度均值大于背景灰度均值。考慮到傳統(tǒng)LoG 算子對(duì)灰度變化敏感問(wèn)題,同文獻(xiàn)[12],本文使用優(yōu)化LoG算子來(lái)代替Δ,用于平滑同質(zhì)區(qū)域,保持目標(biāo)邊緣,使用表示圖像域,定義如下能量泛函:

其中,為權(quán)重系數(shù),(·)為亥維賽函數(shù)。此外,本文利用目標(biāo)先驗(yàn)信息判斷待分割目標(biāo)相對(duì)于圖像的亮暗程度,設(shè)計(jì)自適應(yīng)符號(hào)函數(shù),對(duì)優(yōu)化LoG 能量項(xiàng)進(jìn)行加權(quán),自行判定目標(biāo)邊緣追蹤方向,增強(qiáng)模型自適應(yīng)能力。
首先,利用改進(jìn)的視覺(jué)顯著性檢測(cè)算法獲取目標(biāo)候選區(qū)域,使用大津法對(duì)顯著圖進(jìn)行二值化操作,并利用圓盤(pán)半徑為2 的模板對(duì)獲得的二值化顯著圖依次進(jìn)行腐蝕、膨脹操作。類(lèi)似于文獻(xiàn)[24-25],選取腐蝕后的二值掩碼圖中最大連通域內(nèi)的像素點(diǎn)判為目標(biāo)種子點(diǎn),標(biāo)簽記為1,其余為非目標(biāo)種子點(diǎn),標(biāo)簽記為0,得到目標(biāo)標(biāo)簽矩陣。其次,對(duì)于彩色圖像,同文獻(xiàn)[26],選取原始圖像(R,G,B)通道中具有最大對(duì)比度的位圖Img(:,:,cmax),與標(biāo)簽矩陣以非線(xiàn)性方式結(jié)合,獲取具有最大對(duì)比度位圖中目標(biāo)種子強(qiáng)度均值與非目標(biāo)種子的強(qiáng)度均值,設(shè)計(jì)自適應(yīng)符號(hào)函數(shù)sgn(,)。具體操作步驟如下:
(1)使用(,)表示使用視覺(jué)顯著性檢測(cè)算法獲取的顯著圖中像素點(diǎn),標(biāo)簽矩陣表示二值化顯著圖經(jīng)過(guò)腐蝕操作后具有最大連通域的二值掩碼圖,定義如下:

(2)同文獻(xiàn)[26],選取原始分割圖像R、G、B 通道中具有最大對(duì)比度的位圖Img(:,:,cmax),并使用(,)表示位圖Img(:,:,cmax)中任意像素點(diǎn)的灰度值,分別計(jì)算目標(biāo)種子點(diǎn)與非目標(biāo)種子點(diǎn)對(duì)應(yīng)的灰度均值,如下所示:

(3)比較目標(biāo)種子點(diǎn)與非目標(biāo)種子點(diǎn)的均值大小,設(shè)計(jì)自適應(yīng)符號(hào)函數(shù),定義如下:

結(jié)合式(13)、式(17),本文提出自適應(yīng)符號(hào)函數(shù)的優(yōu)化LoG 能量項(xiàng),定義如下:

圖3(a)中分別給出含有亮、暗目標(biāo)的兩幅合成圖像,圖3(b)分別為其對(duì)應(yīng)的顯著圖,圖3(c)中黃色封閉曲線(xiàn)所包圍的像素點(diǎn)為圖像經(jīng)預(yù)處理操作分別獲取的目標(biāo)種子,依此設(shè)計(jì)自適應(yīng)符號(hào)函數(shù),對(duì)LoG能量項(xiàng)進(jìn)行加權(quán),自行決定曲線(xiàn)演化方向。
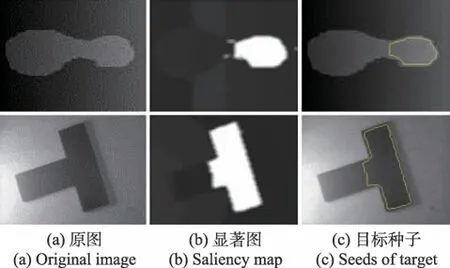
圖3 目標(biāo)種子點(diǎn)Fig.3 Seeds of target
不同于基于圖像全局信息的CV 模型,自適應(yīng)符號(hào)加權(quán)的優(yōu)化LoG 能量項(xiàng)作為一種全局檢測(cè)方法,能夠在灰度分布不均勻圖像中有效識(shí)別與背景強(qiáng)度值相差較大的目標(biāo)邊界,自適應(yīng)決定輪廓曲線(xiàn)的演化方向,避免模型陷入局部極值。然而,僅使用該模型容易出現(xiàn)過(guò)分割現(xiàn)象。
3.2 改進(jìn)局部能量項(xiàng)
本文通過(guò)設(shè)計(jì)局部灰度測(cè)度δ,與局部核函數(shù)δ相結(jié)合,充分考慮局部窗口內(nèi)鄰域像素點(diǎn)對(duì)中心點(diǎn)的影響權(quán)重,構(gòu)建新的局部能量項(xiàng)。
其次,設(shè)計(jì)局部灰度測(cè)度統(tǒng)計(jì)局部窗口內(nèi)中心像素點(diǎn)處的灰度信息變化,當(dāng)局部窗口位于同質(zhì)或弱邊緣區(qū)域,灰度變化較小,應(yīng)減弱空域中局部鄰域點(diǎn)對(duì)中心點(diǎn)的影響;當(dāng)局部窗口鄰域點(diǎn)為邊緣點(diǎn)或噪聲點(diǎn)時(shí),局部窗口灰度變化較大,應(yīng)增強(qiáng)空域中鄰域點(diǎn)對(duì)中心點(diǎn)的作用。以此提高模型在弱邊緣處的敏感程度,防止錯(cuò)誤邊緣點(diǎn)出現(xiàn)。
對(duì)于圖像中的任一局部窗口N,使用ω表示中心像素點(diǎn)所在局部窗口的灰度分布均勻程度,定義如式(20):

本文采取負(fù)指數(shù)函數(shù)來(lái)設(shè)計(jì)局部窗口內(nèi)中心像素點(diǎn)處的局部灰度測(cè)度,定義如下:

不難看出,當(dāng)像素點(diǎn)對(duì)應(yīng)的ω值較小時(shí),δ取得較大值;反之,亦然。結(jié)合局部灰度變化信息與空間信息改進(jìn)局部能量項(xiàng),重新定義式(1):
式中,、均為正常數(shù);、表示局部擬合強(qiáng)度均值;()為亥維賽函數(shù),使用正則化函數(shù)H()代替計(jì)算,其定義如式(23)所示。
改進(jìn)的局部能量項(xiàng)在局部灰度統(tǒng)計(jì)信息與空間信息共同作用下,能夠有效提取目標(biāo)弱邊緣,極大程度上保持了目標(biāo)輪廓的連貫性與完整性,但對(duì)初始化輪廓設(shè)置仍然較敏感,且曲線(xiàn)演化易陷入局部極值,無(wú)法準(zhǔn)確定位目標(biāo)邊界。
3.3 RBHM 模型的提出
鑒于對(duì)上述兩種能量項(xiàng)的優(yōu)缺點(diǎn)分析,本文以線(xiàn)性方式將兩者結(jié)合起來(lái),提出的RBHM 模型在分割過(guò)程中能夠有效保持目標(biāo)的完整性,具有較強(qiáng)的自適應(yīng)能力,能量泛函定義如下:

采用同文獻(xiàn)[7]中對(duì)RSF模型的實(shí)現(xiàn)方式,局部均值擬合函數(shù)()、()分別通過(guò)以下卷積運(yùn)算獲取:
固定()、(),能量泛函(25)關(guān)于水平集函數(shù)變分,由梯度下降流得到演化曲線(xiàn),如下所示:
式中,=1,2,?表示梯度算子;div(·)為散度算子。使用ISR 算法獲取的初始化輪廓能夠有效識(shí)別視覺(jué)顯著區(qū)域,并將提取的目標(biāo)先驗(yàn)信息用于初始化輪廓的設(shè)置與優(yōu)化LoG 能量項(xiàng)符號(hào)的設(shè)計(jì),消除人工干預(yù),增強(qiáng)模型自適應(yīng)能力,而后使用改進(jìn)的區(qū)域擬合能量模型RBHM 引導(dǎo)演化曲線(xiàn)進(jìn)一步分割。圖4(a)給出一幅共聚焦顯微鏡圖像和一幅腦血管造影圖像及其初始化,圖4(b)給出僅使用高斯核函數(shù)定義的局部能量項(xiàng)分割圖4(a)中兩幅圖像的結(jié)果,圖4(c)為使用局部灰度測(cè)度與高斯核函數(shù)改進(jìn)的局部能量項(xiàng)的分割結(jié)果,圖4(d)為僅使用自適應(yīng)符號(hào)函數(shù)加權(quán)優(yōu)化LoG 全局能量項(xiàng)對(duì)應(yīng)的分割結(jié)果,圖4(e)為本文提出的RBHM 模型分割結(jié)果。其中,綠色曲線(xiàn)表示使用ISR 算法獲取的初始化輪廓,紅色曲線(xiàn)表示分割結(jié)果。高斯核標(biāo)準(zhǔn)差=3.3,在分割圖4(b)~(e)第一行圖像時(shí),長(zhǎng)度項(xiàng)系數(shù)依次設(shè)置為0.000 5 v、0.000 3 v、0.000 1 v、0.000 3 v,在分割圖4(b)~(e)第二行圖像時(shí),長(zhǎng)度項(xiàng)系數(shù)依次設(shè)置為0.000 6 v、0.000 6 v、0.000 1 v、0.000 6 v,其中v=255×255。
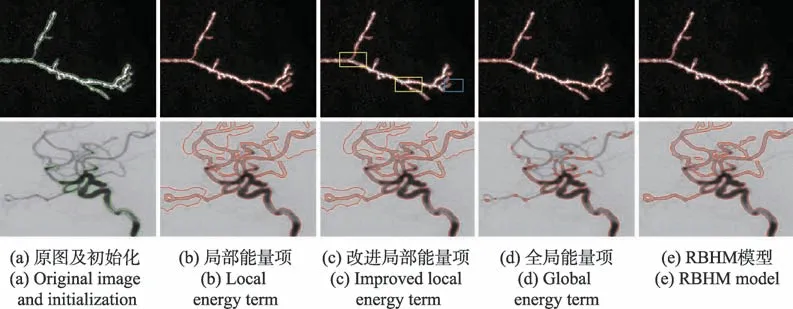
圖4 RBHM 模型的有效性Fig.4 Effectiveness of RBHM model
改進(jìn)的局部能量項(xiàng)由于充分考慮了局部灰度域與空域信息的變化,提高了RBHM 模型在弱邊緣處的敏感程度。由圖4(c)第一幅圖像不難看出,改進(jìn)的局部能量項(xiàng)在圖中弱邊緣(黃色框)處的分割結(jié)果更加連貫,然而僅使用改進(jìn)的局部能量項(xiàng)在非邊緣目標(biāo)邊界易發(fā)生粘連,如該圖中(藍(lán)色框處)所示。且在目標(biāo)分布范圍較廣的弱邊緣圖像中,易陷入局部極值,如圖4(c)中第二幅圖像所示。自適應(yīng)符號(hào)函數(shù)加權(quán)的優(yōu)化LoG 能量項(xiàng)由于引入目標(biāo)先驗(yàn)信息,能夠自動(dòng)追蹤目標(biāo)邊界方向,且作為一種全局檢測(cè)方法,該能量項(xiàng)不易陷入局部極值。考慮到上述兩種能量項(xiàng)的優(yōu)缺點(diǎn),以線(xiàn)性方式將其結(jié)合起來(lái),一方面保持目標(biāo)輪廓的連貫性和完整性,另一方面降低模型陷入局部極值的可能性,更好地定位目標(biāo)邊界,得到了較為滿(mǎn)意的分割結(jié)果,如圖4(e)所示。
4 基于ISR算法和RBHM模型的圖像分割算法
本文首先根據(jù)ISR 算法自動(dòng)獲取初始輪廓曲線(xiàn),而后使用本文提出的RBHM 模型引導(dǎo)曲線(xiàn)繼續(xù)演化,直至滿(mǎn)足迭代停止條件。
本文模型的算法流程圖如圖5 所示,具體實(shí)現(xiàn)操作步驟如下:
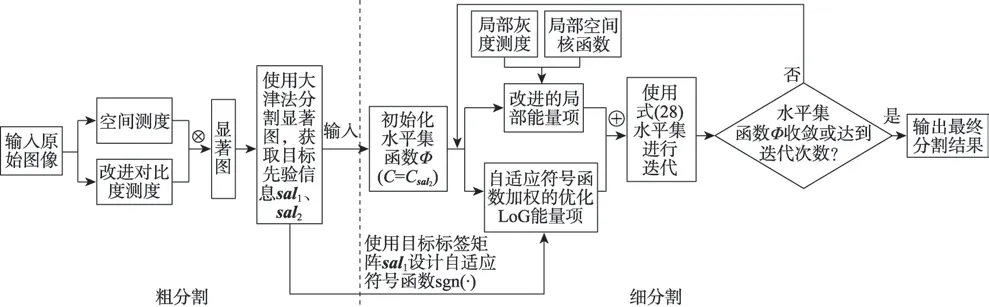
圖5 本文模型流程圖Fig.5 Flow chart of proposed model
(1)演化曲線(xiàn)常規(guī)參數(shù)設(shè)置:=1,=3.0,局部窗口半徑=round(2),=2,===1,=0.8,Δ=0.02,=0.01,=3,長(zhǎng)度項(xiàng)系數(shù)需根據(jù)圖像進(jìn)行調(diào)整。
(2)使用ISR 算法獲取圖像的初始輪廓,構(gòu)造水平集函數(shù),即:
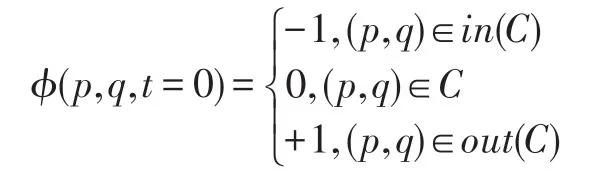
其中,=C。
(3)根據(jù)式(14)~(17)設(shè)計(jì)自適應(yīng)符號(hào)函數(shù)sgn(,),對(duì)優(yōu)化LoG 能量項(xiàng)進(jìn)行加權(quán),使用式(18)計(jì)算自適應(yīng)符號(hào)函數(shù)加權(quán)的優(yōu)化LoG 能量項(xiàng)。
(4)根據(jù)式(20)~(21)計(jì)算局部灰度測(cè)度,利用式(22)定義改進(jìn)局部能量項(xiàng),再根據(jù)式(25)構(gòu)建新的能量泛函。
(5)根據(jù)式(26)~(27)計(jì)算局部擬合均值、。
(6)固定、,根據(jù)式(28)更新水平集演化方程。
(7)每迭代6 次,計(jì)算演化輪廓曲線(xiàn)所圍面積的變化,當(dāng)滿(mǎn)足|S-S|<10或迭代次數(shù)>500,則停止迭代并輸出分割結(jié)果。
5 實(shí)驗(yàn)結(jié)果及分析
本文實(shí)驗(yàn)均在Intel Core i5-4210U 1.70 Hz CPU,4.0 GB RAM 和Windows 7(64 位)操作系統(tǒng)的個(gè)人計(jì)算機(jī)上完成。編程環(huán)境Matlab 2015a。實(shí)驗(yàn)中所使用的示例圖像選自數(shù)據(jù)庫(kù)以及四幅真實(shí)示例圖像。SPF 模型中的常值速度以及RSF、LGIF、ACML、LPF中的長(zhǎng)度項(xiàng)系數(shù)~均需根據(jù)圖像調(diào)整,LPF、ACML 模型中時(shí)間步長(zhǎng)Δ=0.02 。除特殊說(shuō)明外,其余參數(shù)均參考原文設(shè)置。
5.1 ISR 算法有效性分析
為了評(píng)估自動(dòng)獲取初始化輪廓算法ISR 的有效性,圖6 給出六幅真實(shí)示例圖像,前兩幅均為含有弱邊緣且灰度分布不均勻的血管圖像;第三幅為對(duì)比度較低的輸卵管造影圖像;第四幅為灰度分布極其不均勻且含有弱邊緣的莖葉圖像;第五幅為一幅含有多目標(biāo)圖像,第六幅為含有極弱邊緣的貝殼圖像。圖6、圖7 分別給出六種模型在人工設(shè)置的初始化輪廓與使用ISR 算法獲取的初始化輪廓下的分割結(jié)果。圖6、圖7 中~表示RSF、LGIF、ACML、LPF 模型中的高斯核標(biāo)準(zhǔn)差,、θ分別表示LGIF模型全局項(xiàng)系數(shù)與ACML 模型全局項(xiàng)系數(shù)。圖6 依次給出人工設(shè)置的初始化輪廓曲線(xiàn)(綠色框)及SPF、RSF、LGIF、ACML、LPF 與RBHM 模型分割結(jié)果(紅色曲線(xiàn))。表1 為分割圖6、圖7 時(shí)模型中所使用的常值速度與長(zhǎng)度項(xiàng)系數(shù)值。
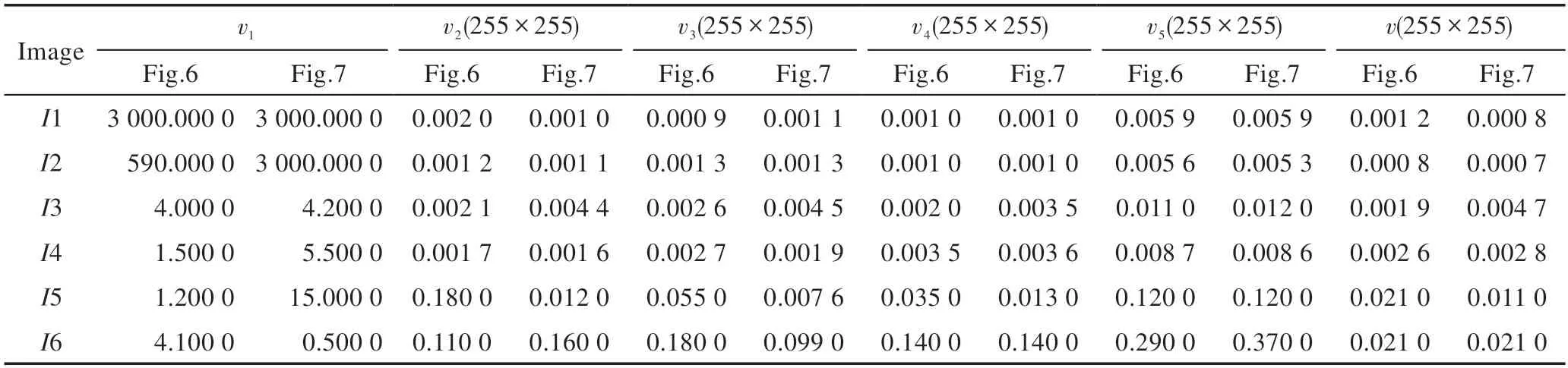
表1 分割圖6、圖7 示例圖像時(shí)各模型中v、v1~v5 的取值Table 1 Value of v,v1 to v5 in each model segmenting sample images on Fig.6 and Fig.7
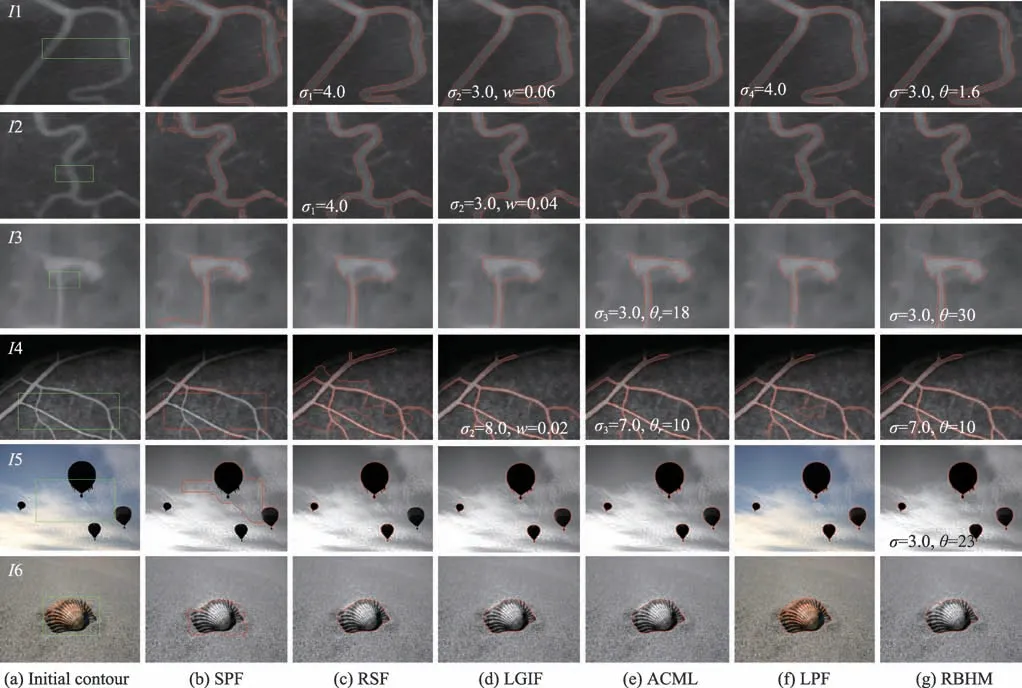
圖6 人工初始化分割結(jié)果Fig.6 Segmentation results of manual initialization
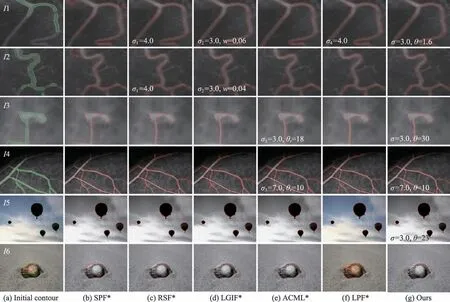
圖7 自動(dòng)初始化分割結(jié)果Fig.7 Segmentation results of automatic initialization
由圖6 所示分割結(jié)果可以看出,使用人工設(shè)置的矩形框初始化輪廓做引導(dǎo),由于SPF 模型僅考慮圖像全局信息,在處理灰度分布不均勻的弱邊緣圖像中,整體效果欠佳;由于RSF 模型僅考慮局部空間變化信息,對(duì)初始化的設(shè)置十分敏感,在圖像4 中出現(xiàn)錯(cuò)誤分割結(jié)果,且難以將圖像中的多個(gè)目標(biāo)分割出來(lái),如該模型在圖像5 中分割結(jié)果所示;LGIF 模型通過(guò)引入全局項(xiàng)對(duì)RSF 模型進(jìn)行改進(jìn),在圖像5 中取得較優(yōu)的結(jié)果,但仍泄露了部分目標(biāo)弱邊緣,且在分割圖像3~4 時(shí),受背景干擾,該模型仍容易陷入局部極值,這是由于該模型中的全局項(xiàng)在灰度不均勻圖像中處理能力弱,即便增大全局項(xiàng)系數(shù),也難以準(zhǔn)確獲取目標(biāo)邊界;LPF 模型在預(yù)擬合均值函數(shù)的作用下,降低了對(duì)初始化輪廓設(shè)置的敏感程度。然而,該模型在分割圖像4 時(shí),由于背景干擾,出現(xiàn)“孤島”區(qū)域;ACML 模型與RBHM 模型均使用優(yōu)化LoG 能量項(xiàng)作為全局項(xiàng),能夠在灰度不均勻圖像中準(zhǔn)確識(shí)別目標(biāo)邊界,如在圖像3~4 中的分割結(jié)果所示。而本文提出的RBHM 模型中的局部能量項(xiàng)充分考慮局部空間和灰度域信息,提高模型在弱邊緣處敏感程度,因此在圖像6 的極弱邊緣處,分割效果明顯優(yōu)于ACML模型。
圖7 給出使用ISR 算法自動(dòng)獲取的初始化輪廓(綠色曲線(xiàn)),分別與SPF、RSF、LGIF、ACML、LPF 以及本文提出的RBHM 模型相結(jié)合,依次標(biāo)記為SPF*、RSF*、LGIF*、ACML*、LPF*以及Our(RBHM*)模型。
由圖7 各模型的分割結(jié)果(紅色曲線(xiàn))易看出,使用ISR 算法獲取的初始化輪廓,較人工初始輪廓,各模型分割效果大都得到改善。SPF*模型在某些情況下能夠得到部分精確結(jié)果,如在圖像4~6 中分割結(jié)果所示;RSF*模型在灰度不均的圖像3~4 以及含有多目標(biāo)的圖像5 中均取得了較為滿(mǎn)意的分割結(jié)果;LGIF*模型在灰度分布不均的圖像3 與圖像4 上均得到更為準(zhǔn)確的分割結(jié)果;LPF*模型在圖像3~4、6 上的分割效果也得到改善。ACML*模型與本文(RBHM*)模型不僅能夠在圖像1~4 上分割出目標(biāo),在圖像5 中,兩種模型均取得更優(yōu)結(jié)果。表2 給出六種模型在人工設(shè)置的初始化輪廓與使用ISR 算法獲取的初始化輪廓下分割所需迭代時(shí)間。
結(jié)合表2 和圖6、圖7 的分割結(jié)果,不難看出,利用ISR 算法設(shè)置的初始化輪廓曲線(xiàn),能夠準(zhǔn)確獲取目標(biāo)先驗(yàn)信息,節(jié)省了整體迭代所需時(shí)間,提高了各模型分割效率。
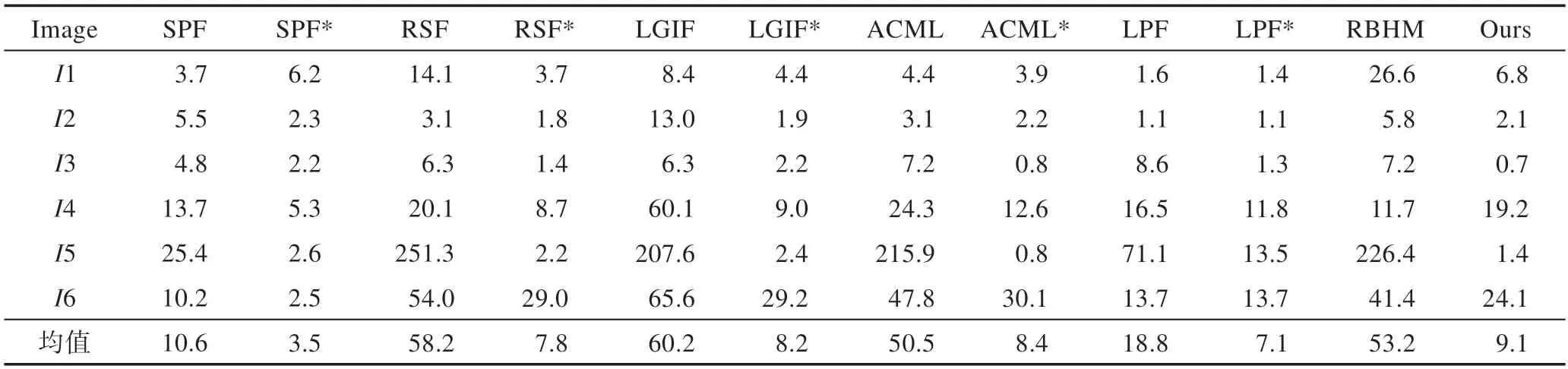
表2 比較六種模型使用不同初始化輪廓所需的迭代時(shí)間Table 2 Iteration time required for six models using different initialized contours s
5.2 RBHM 模型的有效性分析
為了進(jìn)一步驗(yàn)證本文模型分割結(jié)果的精確度,引入標(biāo)準(zhǔn)數(shù)據(jù)庫(kù)。表3 給出模型分割圖8 圖像中所使用的常值速度、長(zhǎng)度項(xiàng)系數(shù)。圖8 給出使用ISR 算法自動(dòng)獲取的初始化輪廓(綠色曲線(xiàn)),再依次使用SPF、RSF、LGIF、ACML、LPF模型及本文提出的RBHM 模型對(duì)圖像進(jìn)一步分割。
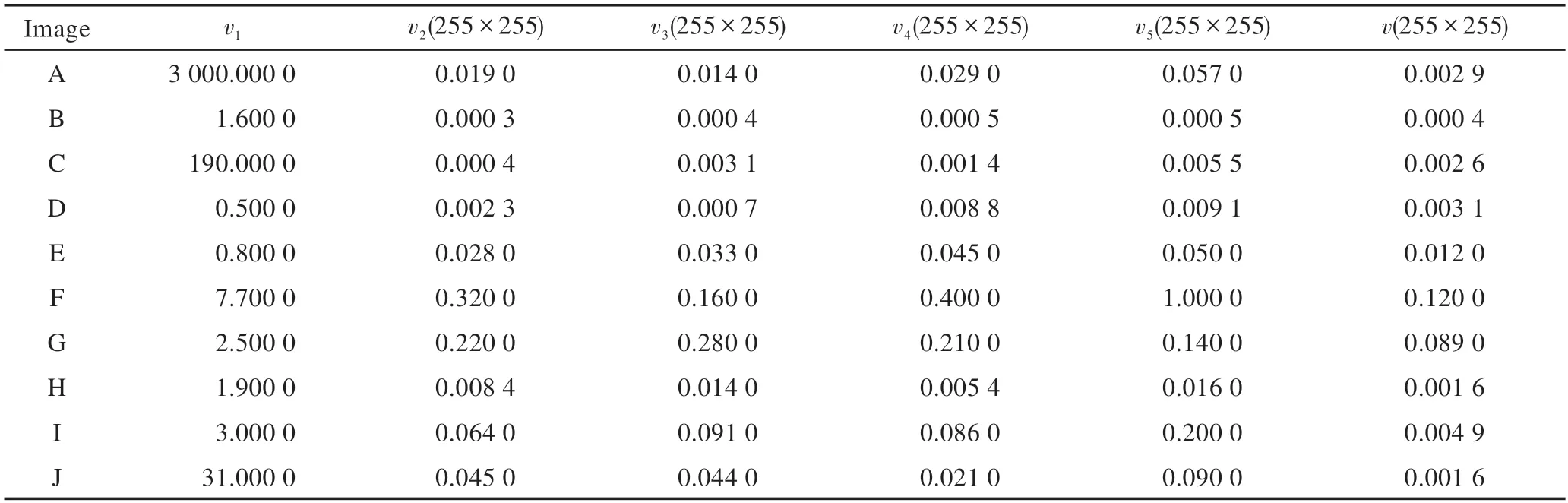
表3 分割圖8 示例圖像時(shí)各模型中v、v1~v5 的取值Table 3 Value of v,v1 to v5 in each model segmenting sample images on Fig.8
由圖8 給出的分割結(jié)果(紅色曲線(xiàn))可以看出,由于SPF*模型僅考慮全局信息,無(wú)法準(zhǔn)確貼合目標(biāo)真實(shí)邊緣,如在圖像I 中的分割結(jié)果所示;RSF*模型、LGIF*模型以及ACML*模型均僅利用局部空間信息來(lái)定義局部能量項(xiàng),導(dǎo)致模型在飛機(jī)機(jī)翼與船桅桿的弱邊緣處發(fā)生泄漏,且無(wú)法提取與背景灰度相似的目標(biāo)區(qū)域,如在圖像A~D、I~J 中的分割結(jié)果所示;LPF*模型通過(guò)計(jì)算三通道(R,G,B)的局部強(qiáng)度均值來(lái)定義局部預(yù)擬合函數(shù),在弱邊緣圖像分割中表現(xiàn)較好,但該模型對(duì)噪聲較敏感,如在圖像G、J 中分割結(jié)果所示。而本文模型在自適應(yīng)符號(hào)函數(shù)加權(quán)的優(yōu)化LoG 能量項(xiàng)的基礎(chǔ)上,加入了改進(jìn)的局部能量項(xiàng),兩種能量項(xiàng)的結(jié)合不僅增強(qiáng)了模型的自適應(yīng)性,還能夠有效識(shí)別噪聲點(diǎn),保留目標(biāo)弱邊緣信息,如在圖像E~F、H 中分割結(jié)果所示,在圖8 示例圖像中獲得的分割結(jié)果與真實(shí)目標(biāo)邊界更為接近,其中在分割圖像G 時(shí),迭代次數(shù)為1 700。
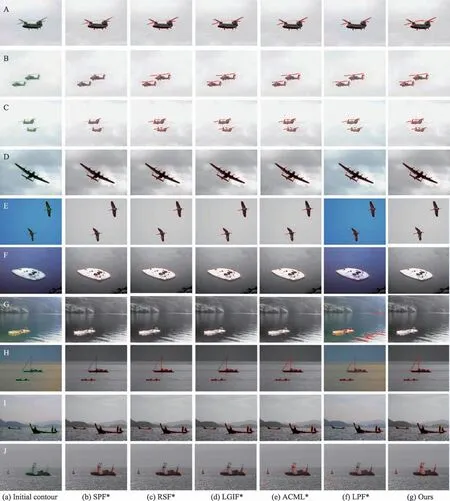
圖8 六種模型分割結(jié)果Fig.8 Segmentation results of six models
采用骰子相似系數(shù)(dice similarity coefficient,DSC)、Jaccard 相似系數(shù)(Jaccard similarity coefficient,JSI)、Hausdorff 距離(Hausdorff distance,HD)三種指標(biāo)來(lái)進(jìn)一步衡量各模型分割結(jié)果的質(zhì)量,定義如式(30)~(32)所示。



表4 和表5 分別給出六種模型在圖8 示例圖像分割結(jié)果對(duì)應(yīng)的DSC、JSI 與HD 的值。結(jié)合表4、表5數(shù)據(jù)及圖8 的實(shí)驗(yàn)結(jié)果可以看出,本文模型能夠在背景復(fù)雜及灰度呈非均勻分布的圖像中有效提取目標(biāo)弱邊緣,且本文模型分割每幅圖片平均迭代時(shí)間為16.0 s,與分割效率最高的SPF*模型僅12.1 s 之差,而本文模型取得了更精確的分割結(jié)果。考慮到馬氏距離不受量綱的影響,因此在計(jì)算簇與簇之間的差異性時(shí),使用馬氏距離對(duì)圖7、圖8 中圖像進(jìn)行測(cè)試,部分圖像無(wú)法獲得準(zhǔn)確的目標(biāo)先驗(yàn)信息,這可能是在計(jì)算馬氏距離時(shí),放大了變化微小的變量作用,導(dǎo)致提取的視覺(jué)顯著區(qū)域不夠準(zhǔn)確,尋找一種更加有效的距離度量方法來(lái)提取視覺(jué)顯著區(qū)域也能夠在一定程度上提高本文模型的分割精度。
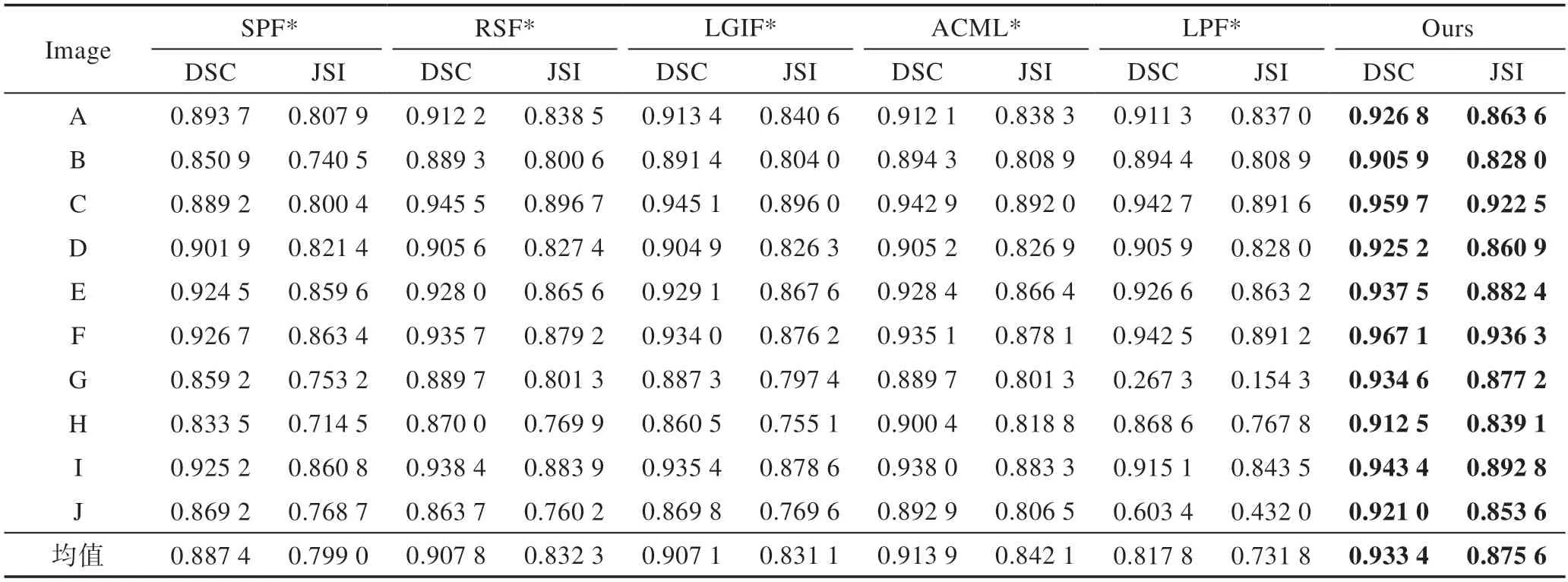
表4 六種模型在圖8 圖像上的分割精度Table 4 Segmentation accuracy of six models on Fig.8
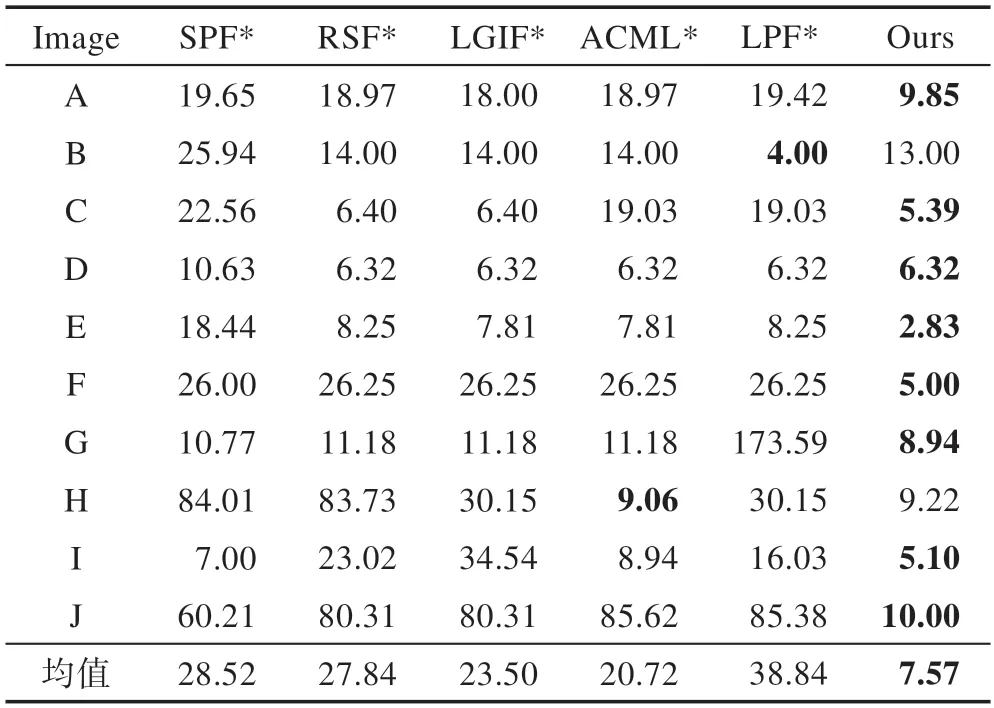
表5 六種模型在圖8 圖像上的分割評(píng)價(jià)(HD)Table 5 Segmentation evaluation of six models on Fig.8(HD)
6 結(jié)束語(yǔ)
本文結(jié)合改進(jìn)的視覺(jué)顯著性檢測(cè)算法,為初始化輪廓的設(shè)置提供可靠的依據(jù),并將獲取的目標(biāo)先驗(yàn)信息用于自適應(yīng)符號(hào)函數(shù)的設(shè)計(jì),對(duì)優(yōu)化LoG 能量項(xiàng)進(jìn)行加權(quán),提出自適應(yīng)符號(hào)函數(shù)加權(quán)的優(yōu)化LoG能量項(xiàng),并與改進(jìn)的局部能量項(xiàng)以線(xiàn)性方式相結(jié)合。一方面,提高模型在弱邊緣的敏感程度,保留目標(biāo)輪廓的連貫性與完整性;另一方面,降低模型陷入局部極值的可能,增強(qiáng)了模型的自適應(yīng)能力。接下來(lái),將進(jìn)一步優(yōu)化顯著圖提取算法,為主動(dòng)輪廓模型中的曲線(xiàn)演化提供更準(zhǔn)確的先驗(yàn)信息。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19