基于顏色特征的道路提取算法研究
2022-05-12 09:25:34田小霞
現代計算機 2022年5期
肖 馳,田小霞
(韓山師范學院計算機與信息工程學院,潮州 521041)
0 引言
隨著遙感技術的快速發展以及國家新基建的提出,智能交通作為新融合基礎基建,在國家戰略中扮演越來越重要的角色。道路作為不同區域互通的紐帶,是地圖制圖和地理信息系統主要的記錄和標識對象。隨著遙感圖像的空間分辨率不斷提高,道路信息更加豐富和復雜,而準確的道路信息是智能交通和智慧城市的基礎。因此,研究從遙感圖像中自動且快速地提取道路對國家和省級層面都具有重要的意義。
遙感圖像中的道路主要具有四個特征:幾何特征、上下文特征、光譜特征和紋理特征。高分辨率遙感中的道路具有更為復雜的信息和上下文特征,同時,噪聲和陰影等對道路特征的影響,使得道路提取仍是遙感圖像處理的熱點。
遙感圖像中的道路提取方法主要分為兩類:自動和半自動。自動算法是根據算法和預處理的數據,計算機自動識別遙感圖像中的道路信息。劉小丹提出一種基于Hough變換和數學形態學的高分辨率遙感影像城區道路提取方法。首先,用Hough 變換檢測主要道路的方向及道路寬度,再根據道路特征判斷直線的關系從而測量道路的寬度。但是城市道路存在彎曲或者多岔路,Hough 變換檢測效果不理想。勞小敏等首先對道路圖像進行二值化,采用數學形態學方法,過濾掉不符合道路幾何特征的地物,利用模板的方向等信息,進而提取道路寬度。半自動算法是采用人機交互提取道路信息的方法。戴激光等采用人機交互提取道路中心點和道路寬度,根據建立的道路模板匹配模型,預測道路方向,通過扇形描述子確定道路跟蹤點,從而生成道路。
顏色特征是一個事物具有最明顯的特征,所以顏色特征是圖像處理首選之一。肖馳提出一種基于HSV顏色空間的車身顏色識別算法,該方法提取整個車身HSV 顏色信息,利用直方圖統計分類并識別車身顏色。謝明鴻和宋納提出一種基于核的Fisher 線性判別(FLD)和形狀特征相結合的方法。首先,提取標注樣本中道路的顏色信息;其次,利用基于核的FLD 對遙感影像進行特征訓練分類,即道路和非道路兩類;然后利用道路的形狀特征和形態學對道路進行優化處理。
本文提出一種半自動道路提取算法,該算法是基于顏色特征的道路提取方法,輔助形態學方法和區域合并算法的融合。首先,人機交互獲取遙感圖像中道路的顏色特征,其次根據獲取的顏色特征對遙感圖像中的道路提取,然后生態學方法和區域合并算法使得粗略道路連續、互通,得到準確的道路網絡。該道路網絡圖為下一步基于深度學習的道路特征信息提取與自動識別打下堅實的基礎。仿真實驗表明本方法可解決由于噪聲、陰影等影響而道路提取效果不理想,以及不能提取彎曲道路等問題,為道路提取提供一個新的參考方案。
1 基于顏色特征的道路提取算法
遙感圖像中不同地物有著自己獨特的特征,如顏色、紋理、幾何等,其中顏色特征是最明顯特征。道路與其他地物在顏色特征上存在顯著差異,從顏色特征的角度提取道路信息是道路提取的首選之一。但城市中道路的復雜性、道路兩邊建筑物和高大樹木遮擋、以及極個別地物具有與道路相似的顏色特征,這些都會影響道路信息提取。為了提取準確的道路信息,本文提出一種基于顏色特征的半自動道路提取算法,該算法包括人機交互提取道路顏色特征,遙感圖像中道路提取,道路區域互通三部分,如圖1所示。
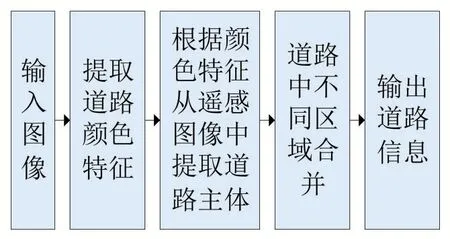
圖1 算法流程
1.1 人機交互提取道路顏色特征
由于光亮和圖像尺度,同一圖像中的道路顏色也不同,故本小節采用人機交互方式獲取道路的顏色特征。道路顏色分量為、、,其表達式如下:
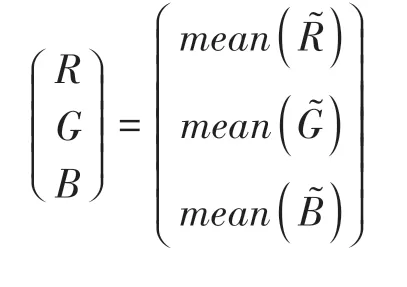

輸入:一張遙感圖像
輸出:顏色分量、、
①用鼠標多次定位在圖像中的道路;


④道路顏色特征為、、。
1.2 遙感圖像中道路提取
由于遙感圖像中道路受噪聲、水坑或者陰影等影響,顏色特征會在一定范圍內波動。不同通道分量中設置閾值,在本小節設置一個松弛變量,以控制顏色特征范圍。

輸入:一張遙感圖像,顏色特征、、
輸出:粗略道路的二值圖像
①設置松弛變量的值;
②確定不同通道分量的顏色特征范圍;
③設置一個與遙感圖像尺寸相同的全零矩陣;
④在遙感圖像中將滿足顏色特征范圍的像素點標記,并在矩陣中標記為1;
⑤輸出。
由于樹或者建筑物遮擋道路,基于顏色空間特征算法提取的道路信息不完整,甚至出現道路中斷現象。為了更好地提取道路信息,本節提出一種區域互通算法,計算出每個區域與其他區域的最小距離,并將該區域標記,使得道路互通。設圖像塊中不同區域標記為Label(= 1,…,),其中為區域個數。區域的最短距離:

其中表示與區域距離最短區域編號,將該區域和區域中距離最短的點標記,記錄這些點組成的區域(最左、最右、最上和最下),實現區域互通。由于不連通的區域可能需要與其它區域相連,如圖2 所示:孤立的區域有A、B、C、D,它們間相互連通的過程分為三步。第一步側重于不同塊間選擇距離最短,然后合并互通,如子圖b,C 與D 的距離最近,故C 與D 合并。第二步CD區域與A塊距離最近,故A與CD塊合并,第三步B與ACD塊相連互通。
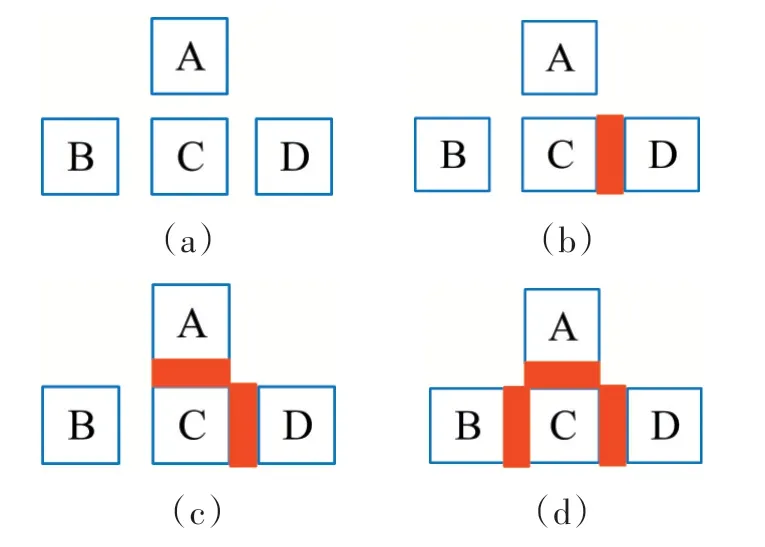
圖2 不同區域互通
由于實驗數據過大,本節采用分治法將整個圖像分成四個規模相同的子圖像塊,分別進行圖像塊的道路互通,之后合并成原圖的道路提取。分治法策略如圖3所示。
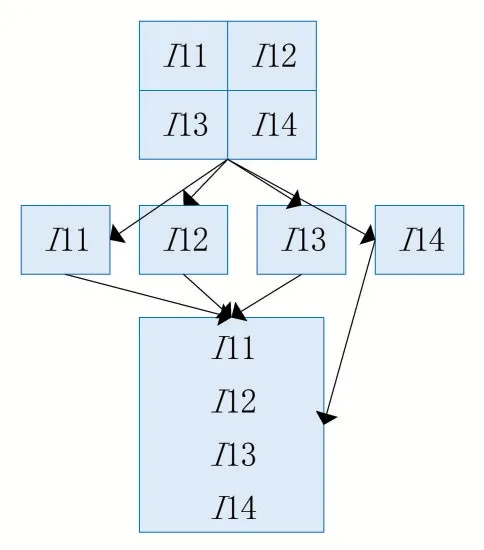
圖3 分治策略
道路互通算法:
①將圖像劃分成四個圖像塊,,,;
②循環 對每一圖像塊;
③ 統計圖像塊的區域個數;
④ 求出每個區域與其他區域的最短距離且標記該最短區域;
⑤ 將每個區域與其距離最短的區域互通;
⑥ 整個圖像塊的區域是否互通,如果是,跳出循環⑧,否則轉③;
⑦ 保存該圖像塊;
⑧將四個圖像塊合并。
2 實驗結果與分析
本研究的軟硬件環境為:DELL 筆記本,處理器為i7-9750H,內存為16 GB,Win10 操作系統,仿真軟件Matlab 2018。
2.1 實驗數據分析
本研究選擇城市道路圖像,提取城市道路信息。圖4顯示城市道路,但部分道路被高大樹木或者建筑物所遮擋,遮擋部分的圖像顏色與道路顏色不同,如紅色框中所示。被遮擋的道路在圖像中被標記為其他地物,使得道路信息不完整、甚至出現不連續的現象。
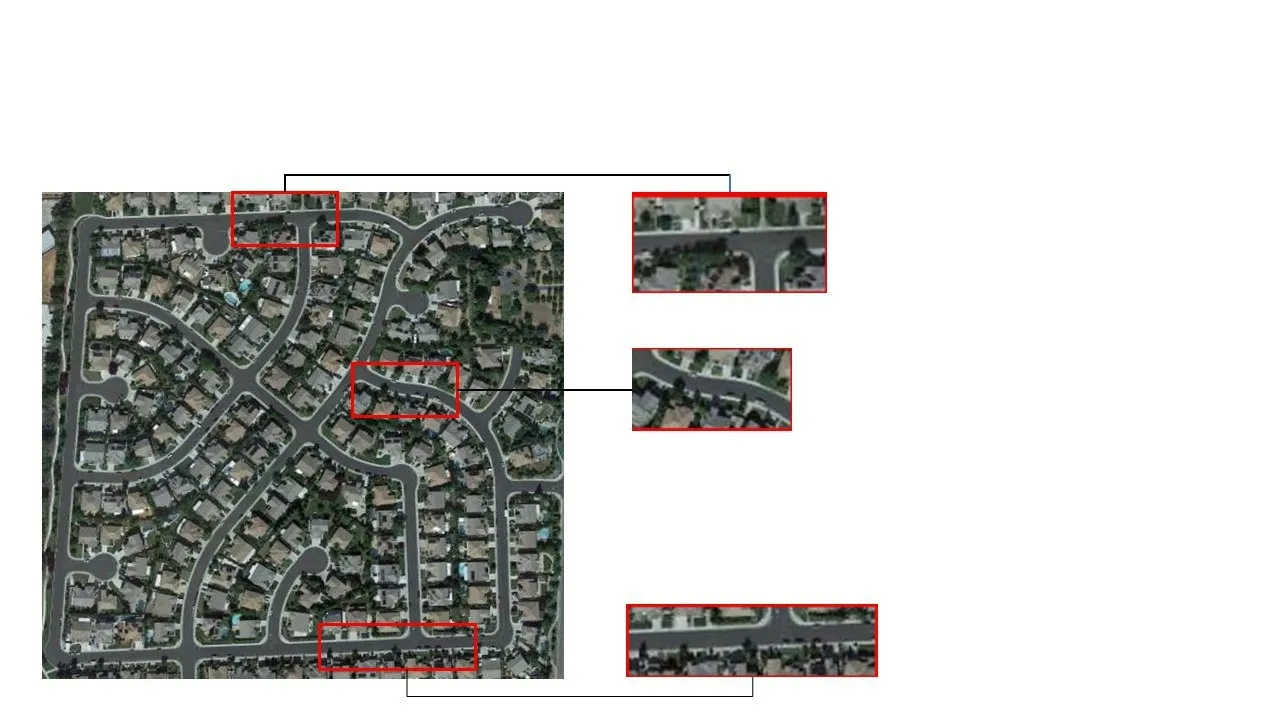
圖4 城市道路
2.2 實驗結果分析
遙感圖像中道路具有與其他地物現狀不同的顏色特征。在理想情況下,基于顏色特征的道路信息提取算法可精確提取圖像中道路信息。但是由于道路被遮擋或者地物中有與道路顏色特征相似,這些都造成提取道路信息缺失,且包含大量噪聲。圖5顯示基于顏色特征提取道路信息,雖然道路基本信息清晰可見,但道路中缺失信息較嚴重,部分路段中斷。此外,還有零散的點散布整個圖像在非道路區域。
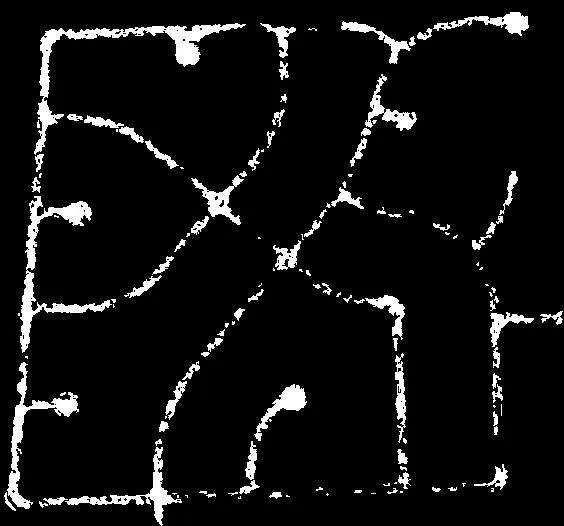
圖5 基于顏色特征提取的道路信息
圖6 顯示兩個不同區域合并示意圖。子圖(a)展示兩個獨立區域;子圖(b)中紅色區域將兩個獨立區域間的空隙覆蓋,借助紅色區域實現兩個獨立區域互通。 紅色的多邊形最左、最右、最上、最下的點作為連通不同區域的紐帶。
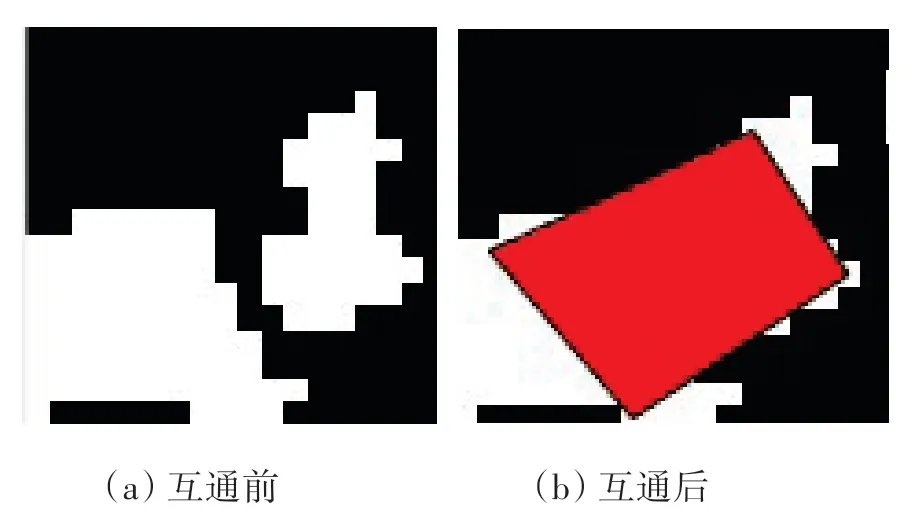
圖6 兩個區域合并示意圖
圖7顯示第一個圖像塊實現不同區域間的互通過程,子圖(a)顯示第一步不同區域的互通情況,區域間最小距離的誤差為5,紅色區域是連接不同區域的部分,紅色區域的大小和形狀是由兩個獨立區域間最小距離的點決定,包括最左、最右、最上和最下。子圖(b)顯示第二步不同區域的互通情況,區域間最小距離的誤差為2,有三個紅色區域。 子圖(c)顯示2個獨立區域2 處互通,此時紅色區域分為兩塊。子圖(d)顯示圖像塊最后互通的情況,雖然道路的寬窄不一,邊緣不光滑,但道路信息是連續的。
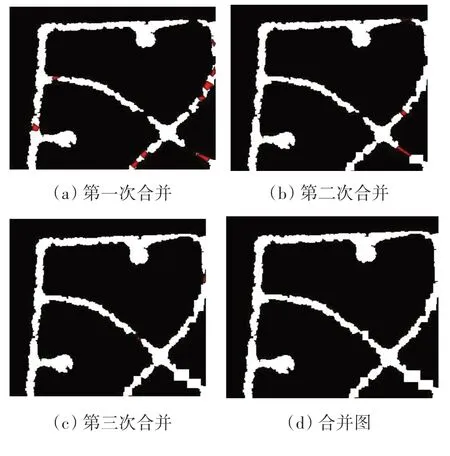
圖7 不同區域合并過程
圖8顯示本文提取道路信息與人工標注的對比圖。與人工標注圖相比,本研究的算法能提取清晰的、準確的主體道路信息。但有些道路段放大且道路邊緣不光滑,如紅色框所示,這主要是:①道路中有噪聲、水坑或被建筑物等地物遮擋的陰影區域,造成道路信息缺失和道路不連續;②互通區域設置為矩形。
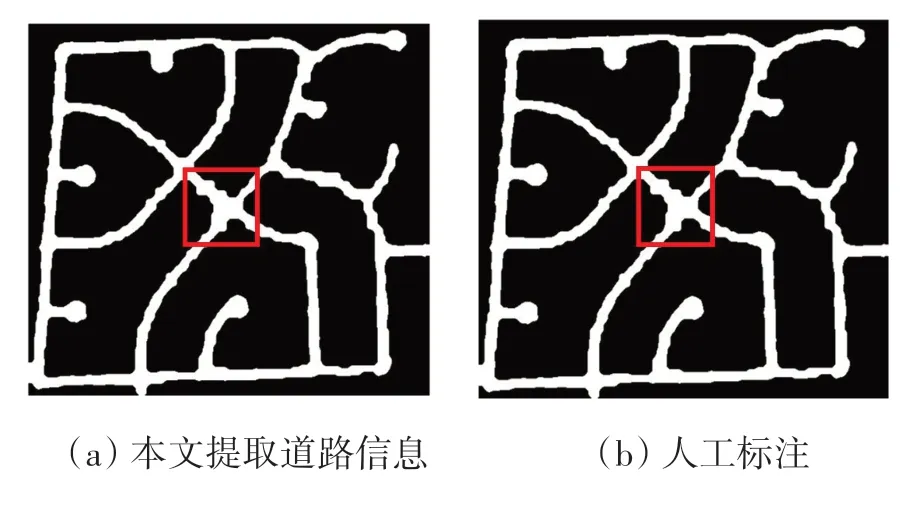
圖8 道路信息
3 結語
本文提出一種半自動道路信息提取方法,該方法分兩步:①由于道路具有明顯顏色特征,通過人工交互方式提取基于顏色特征的粗略道路信息;②由于地物遮擋等原因,道路信息出現較明顯缺失,采用區域互通算法將缺失的道路信息恢復。該算法簡單、易操作,提取道路信息基本完整。根據仿真結果,本研究提取道路信息與人工標注的道路信息基本相同,僅在被遮擋的道路邊緣存在擴大,下一步研究將改進當前算法。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中華手工(2017年2期)2017-06-06 23:00:31
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中外會展(2014年4期)2014-11-27 07:46:46
河南科技(2014年23期)2014-02-27 14:19:15
民生周刊(2012年10期)2012-10-14 09:06:46
