智能一體化乒乓球陪練機器人結構設計
2022-05-11 23:31:28王輝姬美玲余見宋嘉林浩鵬
今日自動化 2022年3期
王輝 姬美玲 余見 宋嘉 林浩鵬



[摘 ? ?要]文章主要設計制造了一種多功能乒乓球發球機器人,創新性地采用變胞機構實現常規乒乓球發球機難以達到的墻角、墻邊拾球功能。文中主要論述機器人的機械結構、工作方式及控制系統。機器人由四大系統即收球、運輸、發球裝置組成,動力系統以麥克納姆輪作為主要動力元件。收球方式上,利用三葉板與擋板相結合,在不同情況下采用不同方式進行收球,可以做到特殊位置球的收集。發球方式的多樣化由摩擦輪轉速及升降平臺共同決定,實現不同強度的訓練。
[關鍵詞]變胞機構;拾發一體;升降剪叉
[中圖分類號]G846 [文獻標志碼]A [文章編號]2095–6487(2022)03–00–04
Structural Design of Intelligent Lntegrated Table Tennis Sparring Robot
Wang Hui,Ji Mei-ling,Yu Jian,Song Jia,Lin Hao-peng
[Abstract]This paper mainly designs and manufactures a multifunctional table tennis service robot. We innovatively use the metamorphic mechanism to complete the function of picking up the ball at the corner and the edge of the wall, which is difficult to achieve by conventional table tennis server. This paper mainly discusses the mechanical structure, working mode and control system of the robot. It is composed of four major systems, namely ball collection, transportation and service devices. The power system is made of Mecanum wheel as the main power element. In the way of collecting the ball, the combination of the three-blade plate and the baffle plate is used to collect the ball in different ways under different circumstances, so that the collection of the ball in a special position can be achieved. The diversification of serving methods is jointly determined by the rotational speed of the friction wheel and the lifting platform to achieve different intensities of training.
[Keywords]metamorphic mechanism; hair-picking integration; lifting scissors
1 概述
隨著生活質量的日益提高,人們更加注重身體健康,因此對運動過程的體驗提出了越來越高的要求,希望通過運動提高身體素質,放松心靈,同時也能緩解壓力。隨著乒乓球行業的發展,出現了不同類型的陪練機器人,一定程度上緩解了乒乓球訓練面臨的問題,但仍不夠完善,因此我們希望能有1款智能一體化的機器人出現,可適應不同環境、不同強度、不同方式的訓練方法。本文設計的自動撿乒乓球機器人,結構設計巧妙,方便使用,占地空間小,可以在機器人領域推廣使用。
2 乒乓球機器人的市場調查研究
2.1 乒乓球機器人的市場調查
雖然目前國內市場上出現了一些拾球和發球機器人正在普及,有了一定的產品積累,能夠在一定程度上實現一些發球和旋球及撿球功能,但是這些機器人的整體效率不高,而且一體化的程度不甚理想,很難將上述幾種功能很好地融合在一起,圖1所示的是常見的滾筒撿球機器人。
該產品為網上售賣的主流乒乓球撿球工具,利用滾筒縫隙彈性拾球,結構簡單,輕巧靈敏,但是需要人工識別球同時需要人工配合完成拾球操作,效率相對低下,儲存球量不多,而且只能拾球不能發球。
圖2所示的產品為佩克特專業乒乓球發球機器人,內有球桌和智能發球機。其高效智能,但是制造成本較高,占地面積大,收放困難,占用資源較多。
2.2 乒乓球機器人的市場調查結果分析
由上圖可知,現有拾發乒乓球機器主要存在以下問題:
(1)機器人效率低,占有面積大,功能不齊全。
(2)機器智能化不足,不能自主完成所有動作,需要人工的配合。
3 智能乒乓球陪練機器人的設計思路
根據上述描述,設計了一款既可以收集墻邊、角落等位置的乒乓球,又可以發不同旋球的高度自動化的乒乓球機器人。該款機器人集拾球和發球功能于一體,其特點有:
(1)變胞機構的設計。巧妙的利用變胞機構實現不同功能,能在最大程度上把特殊位置的乒乓球(如墻角)收集,確保每一個乒乓球都能被收集。
(2)膠輪摩擦方式可實現發球方式的靈活多樣,既能保證乒乓球發射的穩定性,又能極好地控制乒乓球的發射角度。
(3)實現智能化。本機器集收球、發球于一身,操作簡單,占有面積小,具有強大的市場價值,值得推廣。
(4)設計巧妙,功能多樣,效率高,使用方便。
4 具體設計方案
4.1 動力裝置
動力裝置采用麥克納姆輪(麥輪),這是1種可全方位移動的全向輪,由輪轂和輥子聯合構成,基于這些與輪轂成角度的輥和機輪方向,麥輪可實現在任意方向上的運動而不改變機輪自身的運動方向。每個麥克納姆輪單獨由1個12 V電機驅動,運動靈敏,完美適應球館內復雜的地形環境。
4.2 收集裝置
此乒乓球機器人的收集裝置采用三葉板與弧形擋板相結合的方式進行收球動作。
(1)由于乒乓球隨意地散落在場館內,故利用CMOS圖像傳感器搜集場中地面上的乒乓球,利用紅外進行避障,配合麥克納姆輪以運動。然后直流電機驅動三葉板進行轉動,將乒乓球沿著預先設計好的弧形曲面撥進凹槽中,完成收集。
(2)市面上常見的乒乓球直徑為40 mm,重2.7 g左右,根據均質球體在曲面上的運動狀態,其在圓槽上的運動分為3種情況:純滾動、純滑動,半滾動半滑動。綜合分析計算得到對應的弧形擋板設計弧度為半徑R=200 mm。乒乓球收集分為正常情況和非正常情況。正常情況對應場地開闊,機器人正常進行上述工作。
在非正常情況即收集墻角乒乓球時,通過紅外避障系統感知到墻體,將信號傳給電機,電機將動力傳至差速器,進而配合電磁制動器鎖死的特性,將動力不同的配置組成變胞機構。差速器帶動鏈條轉動使得三葉板支撐軸旋轉到上方合適位置,隨后停止運動,形成速度差,使得錐齒輪傳動部分開始運動,帶動所述弧形擋板轉動,從而將乒乓球收集到弧形擋板后方的收集槽內。實現了墻角等特殊位置乒乓球難以收集的問題。
4.3 運輸裝置
運輸裝置在整個機器中,起到承前啟后的作用,即將從收集裝置收集槽中收集到的乒乓球運送到發球裝置。
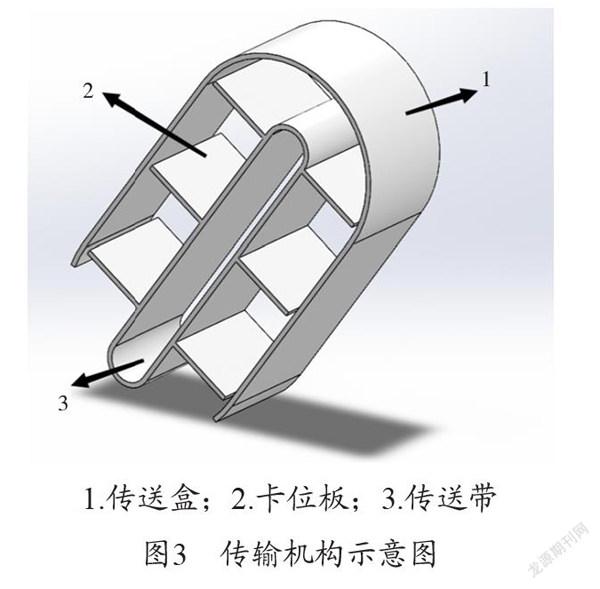
因收集槽后含有驅動裝置等部件,故傳輸機構由傳送盒構成,傳送盒又包括卡位板和傳送帶,將乒乓球傳送至后面的儲球機構內,由輸球機構將球推送到發射裝置。
4.3.1 傳輸機構
傳輸機構如圖3所示,傳送帶根據乒乓球直徑設計為半徑60 mm,有效避免了運輸過程的卡頓現象。工作時由直流電機控制,乒乓球隨著卡位板的轉動而隨之移動,將其運輸到收容腔。
4.3.2 儲球機構
儲球裝置主體為收容腔,收容腔內部表面呈現向后下傾斜的形式,末端兩側為弧形曲面,同弧形擋板R=200 mm,后端中間連同收容腔出口,乒乓球可在重力作用下無論在任何方位都能沿著光滑銜接的曲面滾落集中至收容腔出口。
4.3.3 輸球機構
發球機構如圖4所示,主要由齒輪、齒條、金屬管組成。齒輪齒條構成的往復運動機構,內含2個完整不完整齒輪,3個完整齒輪,1個齒條,齒條上帶有推動頭部,導向片等,此推送裝置由電機驅動,不斷地將從收容腔落下的乒乓球推入管道,同時管道內設有橡膠圈,其目的是為防止乒乓球進入管道后又隨重力返回收容腔出口。
考慮到機器人高度過高的情況,可能會出現乒乓球在桌下而機器人無法進入的情況,將金屬管做成可伸縮式的管道,能沿著上下方向作伸縮運動,調整機器人整體高度,滿足收集要求的同時,能夠調節乒乓球的發射高度。管道末端為一端彎管,出口連接發球裝置。
4.4 發球裝置
4.4.1 升降機構
為完成不同的發球方式,創新設計一款剪叉機構,以便滿足不同情況下的發球需求,同時可以在關機狀態下盡可能降低其高度,減少空間占有。升降機構的主要原理為絲杠剪叉機構的工作原理,運行穩定而安全。
4.4.2 縱擺機構
縱擺機構,其主要作用是調節乒乓球發射時的上下角度,以此來控制乒乓球發射距離的遠近。經計算,俯仰角度最大為40°,可滿足絕大多數情況下的發球需要。縱擺機構由升降平臺、支桿和雙向絲杠構成,相比于常規絲杠,雙向絲杠具有更好的安全性和工作性能。其螺紋部分兩邊正好相反,分別套1支桿,由舵機驅動,當絲杠向1個方向轉動時,兩支桿靠攏,反方向轉動時,支桿分開。兩支桿上連接支撐板,支桿運動,支撐板也跟著上下運動,實現了乒乓球發射角度的調節。
4.4.3 發射機構
此機器采用的發球方法是膠輪摩擦發球,相對 于氣壓式、錘擊式發球機來說,膠輪摩擦發球最大 的優點是既能保證乒乓球發射的穩定性,又能極好 地控制乒乓球發射的角度和速度。
發球機構包括與金屬管尾端彎管相連的鏤空管道、兩個摩擦膠輪以及用以驅動的電機。膠輪嵌入管道約3 mm,使得乒乓球在管內與膠輪摩擦,在摩擦力的作用下向外發射出去,同時,要實現連續的發球,且球速能夠被調節,就要求兩摩擦輪的轉速可調節,因此形成速度差,發出左旋、右旋等球。
若設一摩擦輪的角速度為ω1,二摩擦輪的角速度為ω2,則當ω1=ω2=時,ν=d·ω1/2,發出的是不旋轉的球。當ω1≠ω2時,ν=(ω1+ω2)·d/4,方向為轉速高的輪的方向。
5 控制系統
乒乓球機器人的控制系統采用STM32主板作為主控制器,輔助以CMOS傳感器尋找乒乓球,紅外避障,電機作為驅動來進行收集乒乓球。乒乓球機器人是1個典型的智能實時系統,它涵蓋機器人研究領域智能控制、高速視覺伺服、人機交互以及機器學習等一系列核心技術,研究乒乓球機器人,可以有效地推動機器人技術發展,具有較高的科研價值。
5.1 通過步進電機控制麥克納姆輪實現機器人的運動
原理:通過PWM調整電機的轉速,以間接調節小車的快慢。①搭建電機的硬件電路,STM32沒有單獨的PWM模塊,它是利用定時器來輸出PWM的,每個定時器有4個通道,需要找到定時器與這4個通道所接的引腳,再將這4個引腳接到電機驅動的輸入端上。②搭建電機的軟件電路,實現引腳與定時器的初始化,調用setcompare函數設置占空比,穩定機器人的速度。調用函數實現機器人的左轉、右轉、急停、直行等操作。
5.2 超聲波測距模塊控制舵機實現小車避障
測試距離=(高電平時間*聲速(340M/S))/2。測距直接用調用Senor_Using()這個函數,函數的返回值即為距離。設計思路如下:
(1)舵機向前擺正,測量正前方的距離,如果距離小于30 cm就停下來。
(2)停下后,舵機檢測左邊45°和右邊45°的距離,比較這兩個距離。
(3)假如左邊的距離比右邊大,就用1個do-while循環,使舵機擺正不斷測量前方距離,同時小車緩慢左轉,一直轉到前方距離大于30 cm,小車繼續向前,循環繼續。
4-3open-mv實現乒乓球的識別,從而調動電機去驅動三扇葉裝置收集目標。
STM32單片機作為核心控制器,并協同機器視覺模塊OpenMV組成智能小車系統,針對攝像頭提取的道路圖像信息,采用閾值法和魯棒線形回歸算法提取道路引導線,采用多重模板匹配法提取障礙物信息,并結合傳統PID控制技術和模糊控制技術,實現了智能小車系統的引導線自動循跡和避障功能。
6 結束語
為了進行更有效的訓練并減少人工人力成本,提高教練的訓練質量,我們研發了此款機器人,對各種水平和各種類型的人群都具有很好的輔助性,市場前景廣闊。裝置一體化程度高,功能強大,效果較好,完全可以替代人工進行一部分訓練項目,在一定程度上減少了人力成本。同時采用STM32開發板作為控制器,具有較強擴展性,方便后續優化。裝置設計精巧,原理簡單,操作簡單且容易上手,經過簡單培訓即可完成所有操作任務。
參考文獻
[1] 李小康,趙險峰,胡述祥,等,智能乒乓球陪練機器人結構設計[J].機械設計與制造工程,2020(11):71.