礦用異步電機雙閉環調速系統的仿真研究
2022-05-11 23:31:28陳思之
今日自動化 2022年3期
陳思之




[摘 ? ?要]異步電機由于其結構簡單,價格便宜,使用維修方便等優點,在礦用領域得到了迅速的發展。文章介紹礦用異步電機的雙閉環調速系統,使用MATLAB/SIMULINK搭建了異步電機雙閉環調速系統的仿真模型,并對模型進行詳細說明,仿真結果證明了本文方法的有效性和實用性。
[關鍵詞]礦用異步電機;雙閉環;MATLAB/SIMULINK;仿真模型
[中圖分類號]TM343 [文獻標志碼]A [文章編號]2095–6487(2022)03–00–03
Simulation Research on Double Closed Loop Speed
Regulation System of Mine Asynchronous Motor
Chen Si-zhi
[Abstract]Because of its simple structure, low price and convenient use and maintenance, asynchronous motor has developed rapidly in the field of mining. This paper introduces the double closed-loop speed regulation system of mining asynchronous motor, and uses Matlab / Simulink to build the simulation model of the double closed-loop speed regulation system of mining asynchronous motor, and explains the model in detail. Simulation results show the effectiveness and practicability of the proposed method.
[Keywords]mining asynchronous motor; double closed loop; MATLAB/SIMULINK; simulation model
近年來,異步電機因其結構簡單,價格便宜,使用維修方便等優點,在礦用領域得到了迅速的發展。其中,雙閉環調速系統是礦用異步電機最常使用的調速系統。雙閉環調速系統具有啟動快速,調速靈敏,魯棒性高等優勢,是近年來研究的重點和熱點。通過仿真模型的建立,可以大幅提升電機控制系統研發的效率,并顯著降低成本。鑒于此,本文使用MATLAB/SIMULINK仿真軟件搭建礦用異步電機的雙閉環調速仿真模型,并對模型進行詳細說明。
1 直流調速系統和交流調速系統
交流調速系統具有高可靠性和低成本的優勢,使得近年來在礦山領域獲得了比直流調速系統更為廣泛的運用。直流調速系統可以對電機的轉矩進行精確的控制,而在早期的交流變頻調速中,只能控制電機的轉速,而對力矩是無法做到精確控制的。其原因在于,直流調速的電樞和勵磁不是耦合的,這樣對電樞電流和勵磁電流能夠做到精確控制[1];而對于交流調速系統,電樞電流和勵磁電流互相耦合,使得轉矩無法做到精確控制。通過對交流電機的三相交流電流進行變換,變換成兩相分別為直軸電流與交軸電流,可以對這兩相電流進行控制從而進行調速,但是如何將直軸電流與交軸電流精確地解耦,使得交流電機中的勵磁電流和電樞電流可以被精確控制,是近年來研究的熱點問題[2]。
近年來,學者們提出了矢量控制的變頻調速系統。其基本原理是將異步電機的定子電流矢量分解為產生磁場的電流分量(勵磁電流)和產生轉矩的電流分量(轉矩電流)分別加以控制,并同時控制兩分量間的幅值。根據磁場定向原理,分別對異步電機的勵磁電流和轉矩電流進行控制,從而達到控制異步電機轉矩的目的。
異步電動機矢量控制的基本思想是經過坐標變換可以等效成直流電機,那么,模仿直流電機的控制策略,得到直流電機的控制量,再經過相應的坐標反變換,就能夠控制異步電機了。由于進行坐標變換的是電流(代表磁動勢)的空間矢量,所以這樣通過坐標變換實現的控制系統就稱為矢量控制系統(Vector Control System,VC系統)。給定和反饋信號經過類似于直流調速系統所用的控制器,產生勵磁電流的給定信號和電樞電流的給定信號,經過反旋轉d-q變換得到和,再經過2/3變換得到、和。把這3個電流控制信號和由控制器得到的頻率信號加到電流控制的變頻器上,所輸出的是異步電機調速所需的三相變頻電流。
2 礦用異步電機的雙閉環調速系統
2.1 總電路結構
使用MATLAB/SIMULINK仿真軟件搭建異步電機雙閉環控制的仿真模型,如圖1所示。電機控制是封裝模塊,總電路主要包括三相整流器和三相逆變器等功率電路;三相感應電機、速度控制器、磁場定向控制器(F.O.C)和制動斬波器等驅動電路。左側輸入端有三相交流電源(A、B、C)、轉速給定(SP)、負載轉矩給定(Tm)。三相交流電源單相電壓有效值為460 V,頻率為60 Hz;轉速給定在系統初始時為500 r/min,在時間為1 s時變為0;負載轉矩給定初始值為0,0.5 s時階躍變為792 N·m,到1.5 s時階躍變為-792 N·m。電機控制模塊輸出經選擇模塊輸出信號到示波器。異步電機的功率為200 HP,整個調速系統仿真包含磁場定向控制感應電機驅動模塊(Field-Oriented Control Induction Motor Drive)、轉速給定模塊(Speed reference)、負載轉矩給定模塊(Load torque),電源為有效值460 V、60 Hz的三相交流電源;該電路使用專用電源系統庫模塊,它為帶有制動斬波器的磁場定向控制(FOC)感應電機驅動器建模[3]。
2.2 電機控制模塊內部結構
電機控制器(圖2)是由逆變器和控制器兩部分組成:逆變器接收電池輸送過來的直流電電能,逆變成三相交流電給電機提供電源,控制器接受電機轉速等信號反饋到測量儀器,當發生制動或者加速行為時,控制器控制變頻器頻率的升降,從而達到加速或者減速的目的。
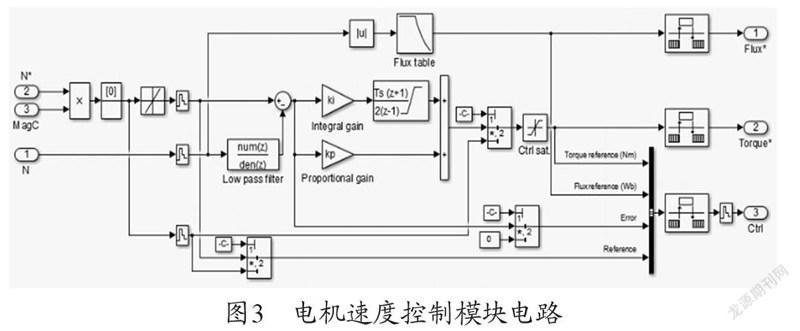
在此模塊內,速度控制器(圖3)基于PI調節器,對偏差信號進行PI控制,使實際轉速趨向于給定轉速。PI調節器的輸出加到矢量控制模塊的輸入端,通過與給定的磁通和轉矩值計算可求出三相電流給定值,并與實際電流比較,求出脈沖信號大小,控制開關器件的通斷,從而控制電機定子輸入電壓大小,進而控制速度大小。
3 速度控制模塊參數設置
3.1 原始參數及波形
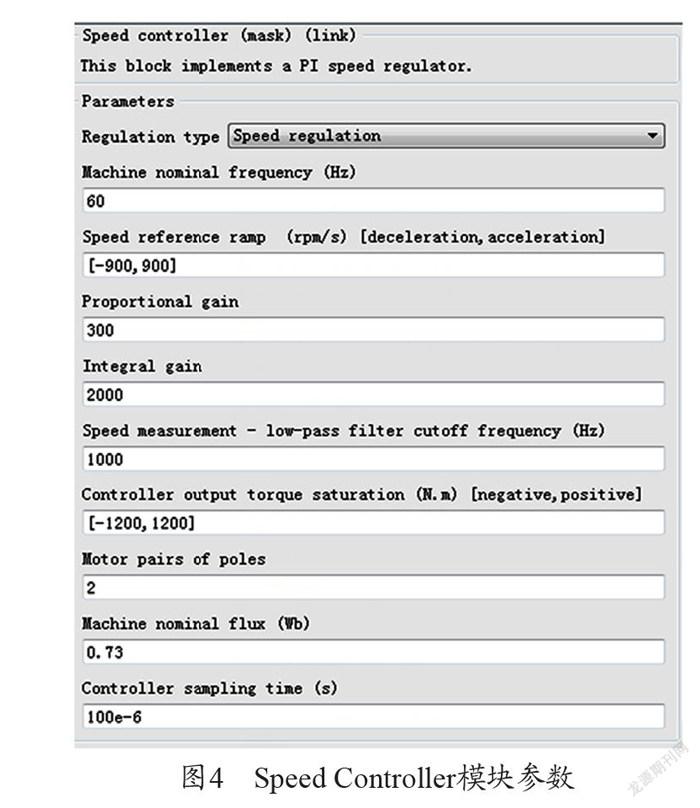
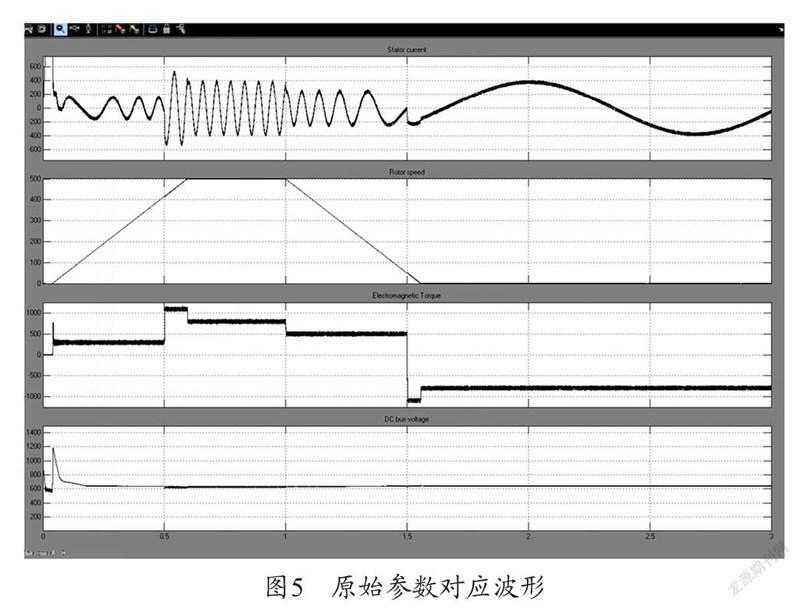
在本文的仿真模型中,可設置的參數為頻率f、轉速PI調節器的Ki和Kp、低通濾波器的截止頻率、輸出轉矩的值、磁通值及采樣時間等。若要改變電機轉速和轉矩,應在Speed reference和Load torque模塊中修改,如圖4所示。原始數據對應的仿真波形如圖5所示。
3.2 Speed Controller參數設置及波形
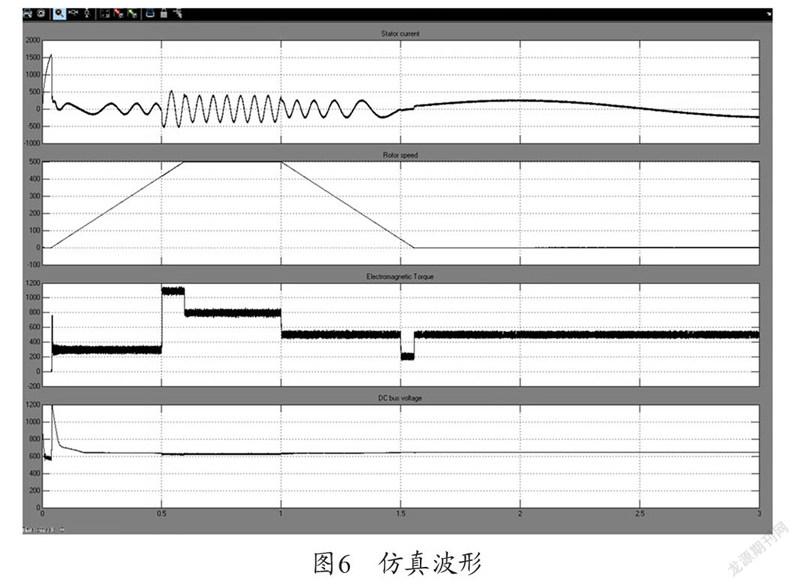
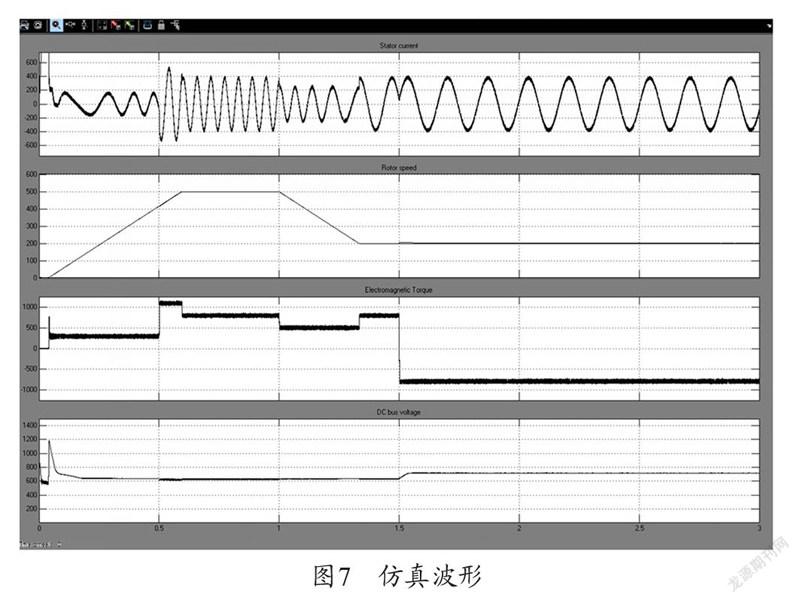
速度調節器通常采用PI控制,比例和積分參數的設置要根據系統的仿真結果不斷地變化改動,以得到最穩定的輸出特性以及動態特性。由于采用PI調節器構成了轉速負反饋的無靜差系統,在負載變化和電網電壓波動等擾動情況下,保持系統的恒定輸出。PI控制時,可將比例常數設為30,積分時間常數設為300,微分時間常數為0。仿真時,在Speed reference模塊和Load torque模塊中修改轉矩值和轉速值,當轉矩指令由792 N·m變到500 N·m時,仿真波形如圖6所示,當轉速指令由500 r/min到200 r/min時,仿真波形如圖7所示。
利用轉速調節器的飽和特性,使得系統保持恒定最大允許電流,在盡可能短的時間內建立轉速,在退飽和實現速度的調節和實現系統的無靜差特性。
當電機的加速度設置為[-1200,1200]時,轉速波形如圖8所示。
與原始參數波形對比可看出,圖8中電機進入穩定運行狀態所需時間減小。
當改變轉速調節器的比例系數Kp分別為200、400時,仿真波形如圖9所示。
Kp分別為200、400時,電磁轉矩開始時峰值隨Kp的增大而增大,但隨Ki變化,波形幾乎沒有變化。
4 結束語
本文介紹了礦用異步電機的雙閉環調速系統,并通過MATLAB的SIMULINK工具箱對其主電路和控制電路分別進行了建模和參數設置,最終建立了礦用異步電動機雙閉環調速系統仿真模型,仿真結果證明了該模型的有效性和可行性。
參考文獻
[1] 巨永鋒,王晶,劉幟琦,等.基于模糊控制的直流調速系統仿真研究[J].現代電子技術,2021,44(1):98-100.
[2] 任林,宗劍,閆娜云,等.異步電機無速度傳感器解耦矢量控制[J].電氣傳動,2020,50(9):15-19.
[3] 張厚升,于蘭蘭,杜欽君,等.發電廠用異步電機雙閉環矢量控制系統研究[J].山東電力技術,2020,47(8):49-54.