基于無線傳感器網絡的機電設備復合故障定位方法
2022-04-29 14:16:00張徐
電氣傳動自動化 2022年2期
張徐
(南京高等職業技術學校,江蘇 南京 210000)
機電設備一直是制造業中十分重要的設備,機電設備的大面積應用在提高生產效率的同時,也會出現故障發生率攀升的問題[1]。相關調查結果顯示,故障定位能夠有效減少機電設備大型、連鎖故障的發生幾率[2],因此該問題受到機械設備研究領域的重視[3]。在機電設備的故障定位中,復合故障的定位是其難點,故需對機電設備復合故障定位問題進行研究。
機電設備復合故障定位技術綜合了數字信號處理、傳感器、計算機等多種先進技術,該問題的研究很早就受到各國學者的關注。實施機電設備復合故障定位能夠實現復合故障的迅速檢修,大幅降低復合故障帶來的經濟損失。在機電設備復合故障定位問題的研究中,有些學者通過監測主軸振動信號,獲取主軸故障振動信號的對應頻域特征,實現機電設備復合故障的定位[5]。但該方法得到的故障特征不全面,影響故障定位的精度。
綜合現有各種研究成果,在研究中應用無線傳感器網絡,設計一種基于無線傳感器網絡的機電設備復合故障定位方法。
1 機電設備復合故障定位方法設計
1.1 基于無線傳感器網絡的復合故障數據采集
為實現機電設備復合故障定位的有效性,首先對機電設備的故障數據進行采集。本文設計一種無線傳感器數據采集網絡,基于無線傳感器網絡完成機電設備復合故障數據采集。設計無線傳感器數據采集網絡由協調器節點、路由節點、電流傳感器節點、節點狀態監測器構成的無線傳感器網絡、供電單元以及監控中心構成[6]。
在設計的無線傳感器數據采集網絡中,協調器節點主要負責接收機電設備復合故障數據;電流傳感器節點主要負責采集機電設備復合故障的電流數據;路由節點負責向電流傳感器節點提供位置信息,在傳遞數據信息的過程中主要起到路由器的作用;節點狀態監測器主要負責對各種節點的狀態進行實時監測;供電單元主要負責實現節點的供電;監控中心負責對節點工作狀態進行監控[7]。
在該無線傳感器數據采集網絡的運行中,首先利用協調器節點對Zigbee網絡進行組裝。完成網絡的組建后,利用協調器節點對網絡參數進行設置,并實施網絡的初始化處理。然后對周圍是否存在申請加入網絡的電流傳感器節點進行周期性判斷,當有新的電流傳感器節點通過協調器節點的驗證并加入該網絡后,由協調器節點分配該節點的地址[8]。如果協調器節點收到機電設備復合故障電流數據采集指令,會對該指令進行廣播,通過電流傳感器節點對電流數據進行采集,再經路由節點將消息發送至協調器節點處。
在該網絡中,主要將電流傳感器節點安置在機電設備復合故障頻發的區域,將電流傳感器的實際采樣頻率設置為500 Hz,每隔2ms實施一次電流數據采樣[9]。此時傳感器的工頻電流波形以20 ms為一個周期,也就是說每個節點在一個工頻電流波形中可以采集周圍10個點的復合故障電流數據,擬合這十個復合故障電流數據后即可獲得故障電流波形。
利用信號調理電路對獲取的三相電流波形進行分析處理后,通過疊加獲取機電設備復合故障的零序電流有效值與零序電流波形[10]。
通過搭建該無線傳感器數據采集網絡,能夠獲取機電設備各個位置的復合故障零序電流。電流傳感器節點的設計具體如圖1所示:

圖1 電流傳感器節點設計
電流傳感器的參數設計主要是對羅氏線圈參數[11]進行設計,選用的羅氏線圈骨架為無磁芯骨架,設計參數具體如表1所示:
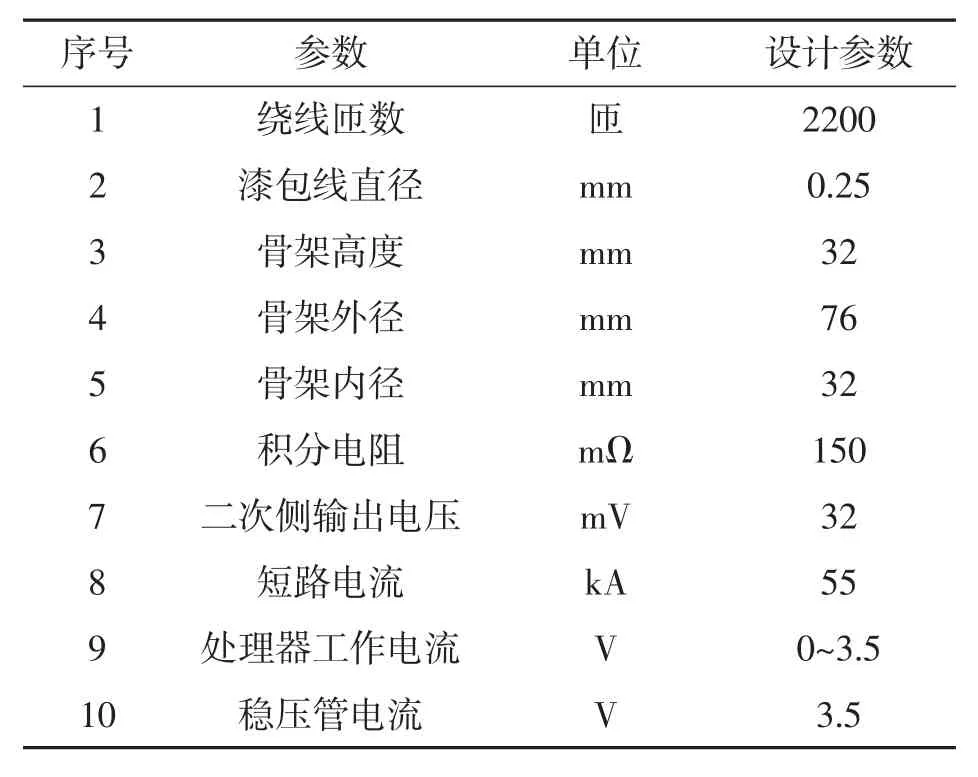
表1 羅氏線圈設計參數
協調器節點的結構設計具體包括串口、電平轉換MAX3232、JTAG接口、8051MCU、無線收發模塊、存儲器、CC2530芯片、USB、AMA1117-3.3TPS63030電壓轉換芯片[12]。而路由節點的結構設計具體包括骨架、積分電阻、繞線、數據包轉發器。
將節點狀態監測器與節點集成在一起,采用直接測量方式對節點狀態進行在線監測,具體功能包括電流監測、電壓監測、處理器狀態監測、AD誤差監測等[13]。節點狀態監測器的結構設計包括電源選擇電路、多路模擬開關、外部檢流電阻以及MSP402FG4783芯片。
供電單元采用取能線圈和備用電源相結合的供電方案,以保障節點能夠正常運行。監控中心選用7816N-K2NVR網絡監控主機作為節點監控PC。
1.2 機電設備復合故障數據預處理
在上述采集的機電設備復合故障數據基礎上,需要對采集的復合故障數據進行預處理,主要通過相模變換、小波能量熵方法實現。相模變換能夠使電壓解耦或相電流成為互相獨立的模態分量[14]。相模變換采用Clark變換,具體公式如下:
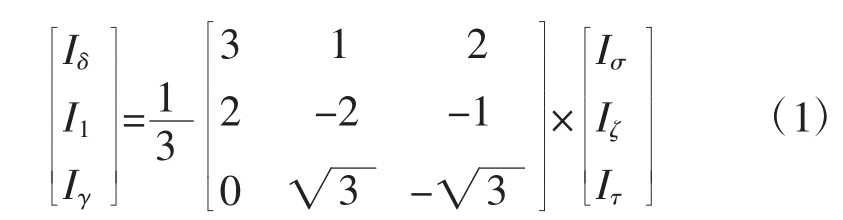
式(1)中,Iδ、I1、Iγ指的是耦合網絡對應的三相信號;Iσ、Iζ、Iτ指的是三相獨立元件,分別為線模式分量、線模式分量、零模式分量。
經過上述相模變換后,為實現故障數據的預處理,采用小波能量熵對不同尺度的信號能量進行估計,具體處理過程如圖2所示:
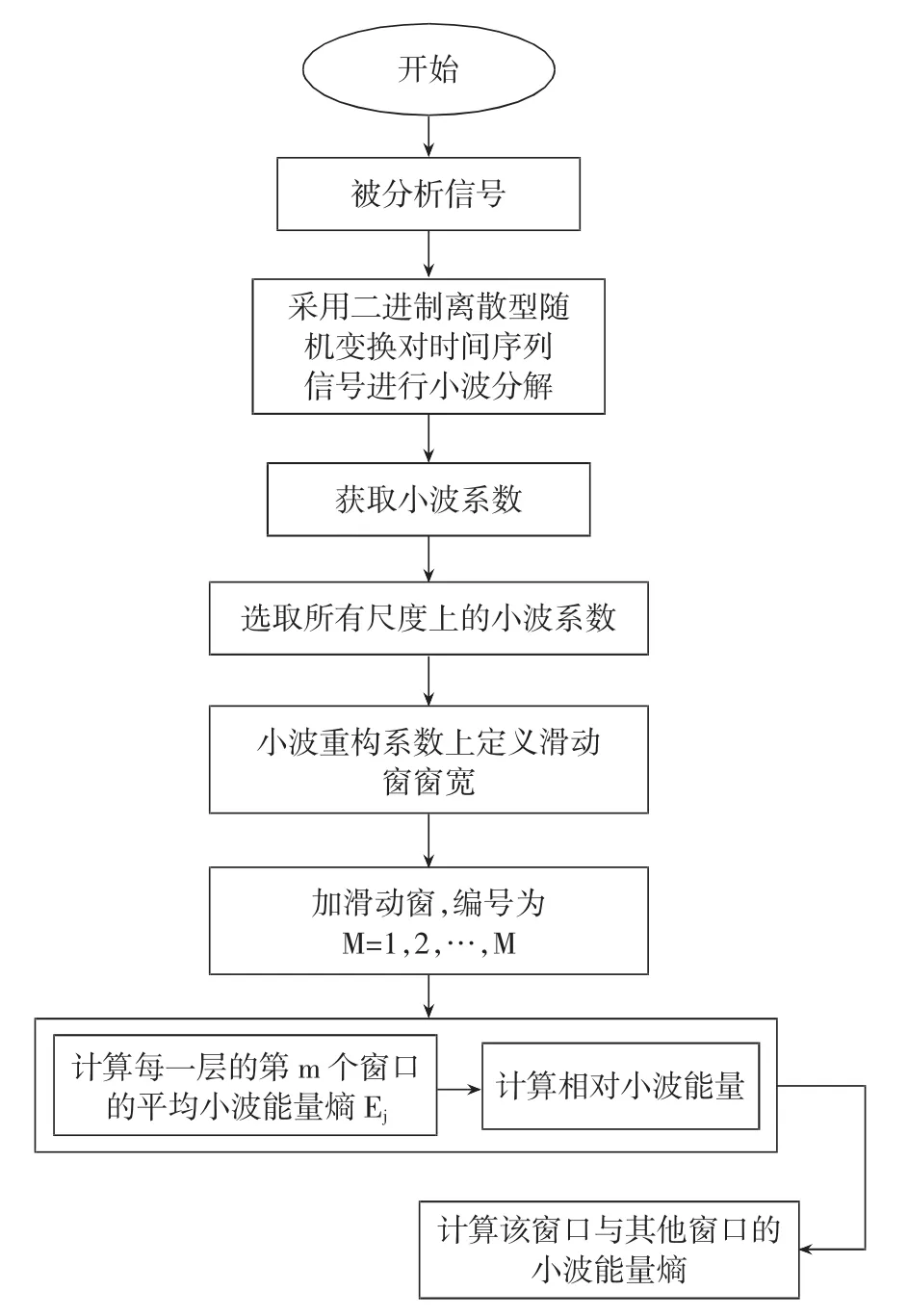
圖2 小波能量熵具體處理過程
在小波能量熵預處理過程中,平均小波能量熵Ej的計算公式具體如下:

式(2)中 x(n)指離散信號;Ejk指離散信號在低頻分量與高頻分量上的相關系數[15]。
相對小波能量的計算公式具體如下:

式(3)中,Em指第m個窗口下全部層的平均能量。
該窗口與其他窗口的小波能量熵計算公式具體如下:

式(4)中j指尺度序號。
1.3 機電設備復合故障定位實現
在上述機電設備復合故障數據預處理基礎上,根據虛警概率和傳感器檢測概率設計一種機電設備復合故障定位算法。根據傳感器對復合故障現象的虛警概率和檢測概率設計復合故障觀測空間的模糊函數,描述復合故障特征向量與實際復合故障觀測向量間的相似度,將復合故障定位問題轉化為故障觀測空間中實際觀測向量的歸類問題。設計的機電設備復合故障定位算法步驟具體如下:
(1)構建報警概率矩陣P,具體公式如下:
式(5)中,Pm,n指第m行n列的報警概率。
金樽獎的第一個十年是一個重要的節點,我們很榮幸地將新西蘭作為本屆的金樽獎主賓國。主賓國的意義不僅在于帶領消費者了解相關國家的葡萄酒,更是對這一國家的葡萄酒產業、市場狀況作出的深度調研。
由于報警概率矩陣P僅針對單個故障,對式(5)中的矩陣進行擴展,使其成為V矩陣,將矩陣P直接擴展為(2L-1)×n矩陣。
擴展矩陣的行向量集合具體如下式:

式(6)中,vi指第i個V矩陣行向量。
將式(6)視為n維觀測空間中存在的2L-1個復合故障特征向量。
(2)對于故障觀測向量x,根據下式對x和V矩陣各行的相似度進行逐個計算,具體如下式:

式(7)中,μ(x)指x和V矩陣各行的相似度;co(sδ)是指向量x與向量V之間的夾角,具體計算公式如下:

(3)對k個最大相似度所對應的故障狀態進行提取,作為備選復合故障。并以k個故障狀態的對應節點位置為依據實現復合故障定位[16]。
2 仿真分析
2.1 仿真參數設計
通過仿真平臺測試設計的基于無線傳感器網絡的機電設備復合故障定位方法的性能,并分析測試結果。在仿真測試中,共布設100個無線傳感器網絡節點,具體仿真實驗參數如表2所示。
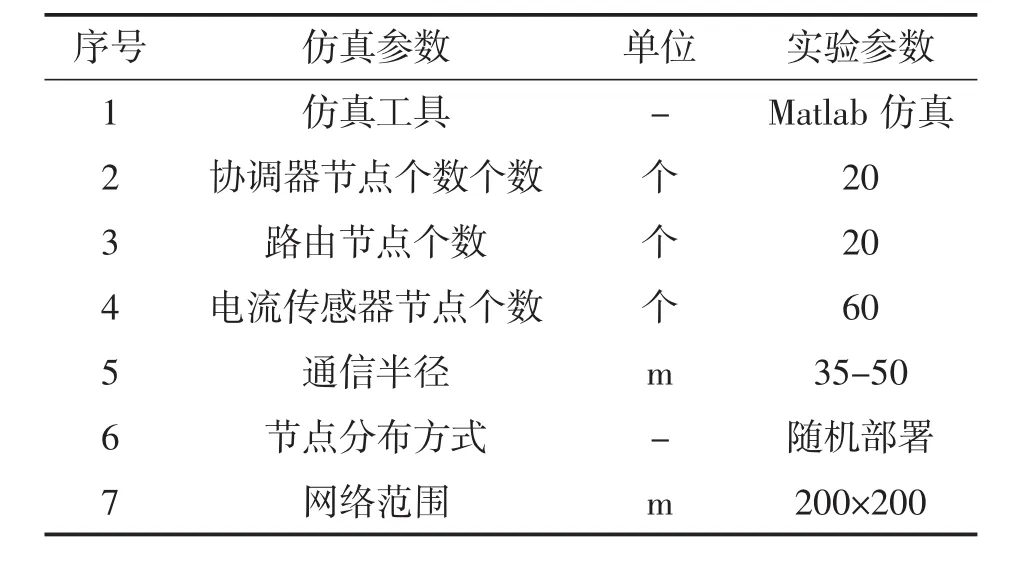
表2 仿真參數
節點分布圖具體如圖3所示。

圖3 節點分布圖
實驗中的機電設備故障特征實驗仿真數據具體如表3所示。
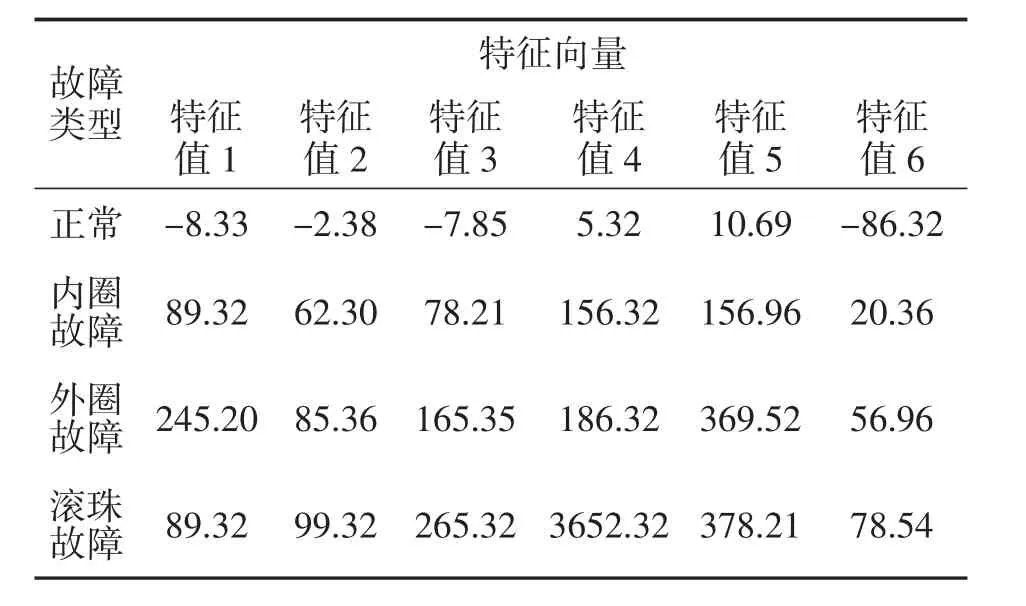
表3 實驗中的機電設備故障特征實驗仿真數據
2.2 仿真結果分析
2.2.1 定位誤差測試
首先測試設計方法的定位誤差,分別獲取設計方法在仿真次數為100次、300次、500次、700次時的機電設備復合故障平均定位誤差測試數據,具體如圖4所示:
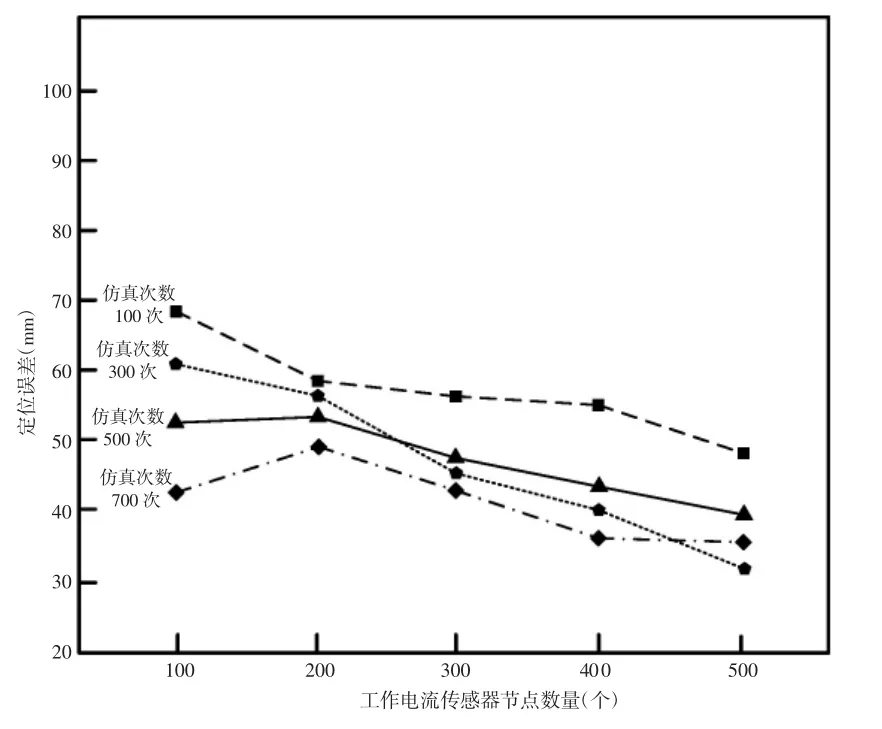
圖4 機電設備復合故障平均定位誤差測試數據
根據圖4的復合故障平均定位誤差測試數據,在仿真次數逐漸上升時,設計方法的機電設備復合故障平均定位誤差逐漸變低,在工作電流傳感器節點數量逐漸上升時,復合故障平均定位誤差也逐漸變低。總體來說,設計方法的復合故障平均定位誤差較低,說明設計方法有著良好的復合故障定位性能。
2.2.2 定位覆蓋面積測試
對設計方法的定位覆蓋面積進行測試,同樣在仿真次數為100次、300次、500次、700次時對設計方法的機電設備復合故障平均定位覆蓋面積進行測試,測試結果具體如圖5所示。

圖5 復合故障平均定位覆蓋面積測試結果
圖5機電設備復合故障平均定位覆蓋面積測試結果表明,隨著工作電流傳感器節點數量逐漸上升,設計方法的定位覆蓋面積有大幅提升;隨著仿真次數的增加,設計方法的定位覆蓋面積未呈現規律性區別。整體來說,設計方法的復合故障平均定位覆蓋面積較高。同時在實際應用中,可以適當增加無線傳感器網絡的節點布設數量,有助于提高實際復合故障定位覆蓋面積。
2.2.3 定位耗時測試
對設計的機電設備復合故障定位算法,在算法迭代次數不斷增長的情況下,分別對其定位耗時進行測試,并記錄測試結果。具體測試結果如圖6所示。

圖6 定位耗時測試結果
圖6定位耗時測試結果表明,設計方法的定位耗時最高為7.94min,最低為3.19min,整體復合故障定位耗時較短,同時在算法迭代次數不斷增長的情況下定位耗時有大幅度降低,說明在實際定位時需要進行多次算法迭代。
3 結論
目前,機電設備復合故障定位問題在制造業中是一個急需解決的問題,因此,本文對該問題進行了深入研究,提出一種基于無線傳感器網絡的機電設備復合故障定位方法。在研究中實現了較小的定位誤差、較高的定位覆蓋面積以及較低的定位耗時,取得了一定研究成果。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34