含運行協(xié)調性并改進差分進化算法的機組組合
2022-04-26 04:45:06張文軍富立友
電力系統(tǒng)及其自動化學報 2022年4期
張文軍,富立友
(上海電機學院商學院,上海 201306)
機組組合問題決定了發(fā)電機的啟停計劃及經(jīng)濟調度計劃,進而使系統(tǒng)在滿足電力需求的同時消耗最低的成本。近年來由于低成本和低排放,風力發(fā)電在世界各地得到迅速發(fā)展,然而風力發(fā)電具有間歇性且預測精度不高,這給風電并網(wǎng)后電力系統(tǒng)的安全穩(wěn)定運行帶來了巨大挑戰(zhàn)[1]。
為使電力系統(tǒng)在消納盡可能多風電的同時,兼顧經(jīng)濟性、清潔性,已有學者開展了一些研究。文獻[2]分析了不同目標組合策略下電力負荷、機組組合和優(yōu)化目標對風電消納的影響程度;文獻[3]借助非均分嚴格分段線性化方法,通過最小化弧長和弦長的平方差,完成二次煤耗成本函數(shù)嚴格線性化,實現(xiàn)了火電機組調峰煤耗特性的精確模擬;文獻[4]兼顧發(fā)電側與需求側柔性負荷的雙側協(xié)調配合,建立了考慮柔性負荷的多目標安全約束機組組合優(yōu)化模型;文獻[5]建立了風電光伏水電火電聯(lián)合優(yōu)化調度模型,提出通過多種能源聯(lián)合運行及與儲能裝置協(xié)調配合的調度方法,減少可再生能源棄電率。現(xiàn)有研究主要側重電力系統(tǒng)機組組合中經(jīng)濟性、節(jié)能性、清潔性及求解算法的優(yōu)化,未能針對低碳轉型背景下電力系統(tǒng)運行時線路的協(xié)調穩(wěn)定性開展專題分析與深入研究。
在大、小機組分布不均且負荷較重的系統(tǒng)內,傳統(tǒng)調度模式下排放量小、煤耗低的大機組出力會增加,而排放量大、煤耗高的小機組出力會減少,此調度模式會導致部分線路重載甚至過載運行,增加系統(tǒng)的運行風險[6]。因此,機組組合的優(yōu)化需考慮運行協(xié)調性,即需要降低系統(tǒng)運行過程中支路的高負載率。
在機組組合優(yōu)化問題中,多目標差分進化算法DEAMO(differential evolution algorithm for multi-objective)為模型的求解開拓了新視野。DEAMO是一種基于群體智能的多目標啟發(fā)式優(yōu)化算法,其利用種群個體之間的差異性引導算法在解空間中進行搜索,具有全局搜索能力和種群多樣性的特點[7]。目前,多種DEAMO的變體[8-12]被用于機組組合問題的求解并取得了不錯的優(yōu)化效果。
綜上,本文建立含系統(tǒng)運行協(xié)調性、清潔性、節(jié)能性、經(jīng)濟性的4目標優(yōu)化模型,并提出含動態(tài)搜索空間的混沌多目標差分進化CMODE/DSS(chaos multi-objective differential evolution with dynamic search space)算法求解模型,分析不同調度方案下線路運行的穩(wěn)定性能,從而驗證所提優(yōu)化模型在運行調度時可提高系統(tǒng)安全運行水平。
1 建模過程
1.1 目標函數(shù)
考慮系統(tǒng)運行協(xié)調性、清潔性、節(jié)能性、經(jīng)濟性的含風電場機組組合問題的主要目標是在滿足系統(tǒng)安全約束和機組自身運行約束下,決定何時開啟和關閉火電機組來達到最小化運行耗量、盡可能地減少棄風量、最大限度地減少二氧化碳的排放及降低運行支路的高負載率。對于常規(guī)火電機組,煤耗成本及二氧化碳排放量可表示為發(fā)電功率的二次函數(shù)形式,目標函數(shù)分別為
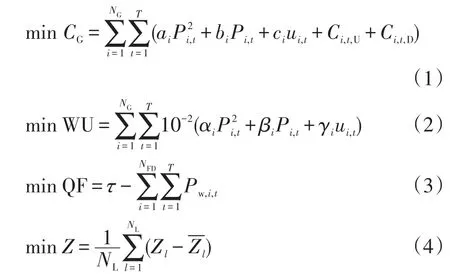
式中:CG為火電機組煤耗成本,$;NG為火電機組數(shù);T為機組運行總時間段數(shù),h;ai、bi、ci分別為火電機組i的煤耗系數(shù);Ci,t,U、Ci,t,D分別為火電機組i在t時刻的開、停機費用,$/次;WU為火電機組二氧化碳排放量,t;αi、βi、γi分別為火電機組i的二氧化碳排放量系數(shù);QF為棄風量,MW;τ為1個較大的常數(shù),本文取1 600;ui,t為火電機組i在t時段的運行狀態(tài),機組運行為1,機組停運為0;Pi,t、Pw,i,t分別為火電機組i、風電機組i在t時段的有功出力,MW;NFD為風電機組數(shù);Z為線路運行協(xié)調性;NL為運行支路總數(shù);Zl、-Zl分別為支路l在運行時段內的負載率、平均負載率,Z越小表示各支路功率分布越均勻且運行協(xié)調性越好。
1.2 約束條件
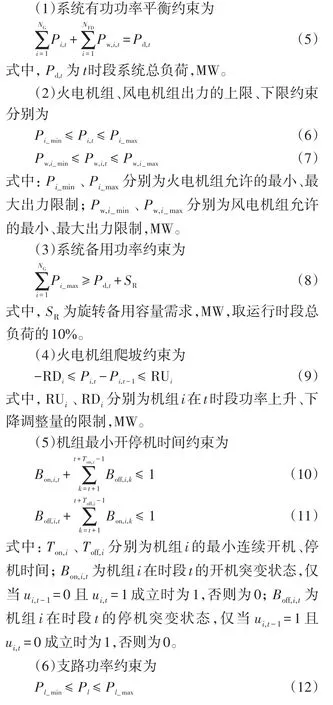

1.3 多目標優(yōu)化模型的數(shù)學描述
多目標優(yōu)化模型可表示為
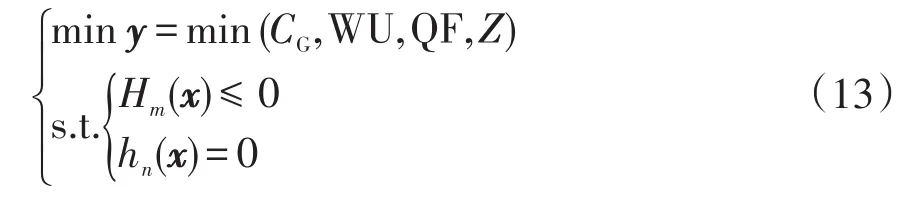
式中:yy為目標函數(shù)向量;xx為火電機組、風電機組的運行狀態(tài)和出力構成的決策向量;Hm(x)≤0定義了m個不等式約束;hn(x)=0定義了n個等式約束。
2 CMODE/DSS算法
隨著多目標優(yōu)化模型的目標函數(shù)數(shù)量的增加,折衷變得復雜且難以量化,需要使用帕累托最優(yōu)概念來描述目標[13-16]。文獻[17]在多目標進化算法EAMO(evolution algorithm for multi-objective)的基礎上引入動態(tài)搜索空間,發(fā)展成了一種基于動態(tài)搜索空間的多目標進化算法SSMOEA(search space-based multi-objective evolutionary algorithm),引入差分進化算子[18]后關鍵操作如下。
2.1 變異與交叉
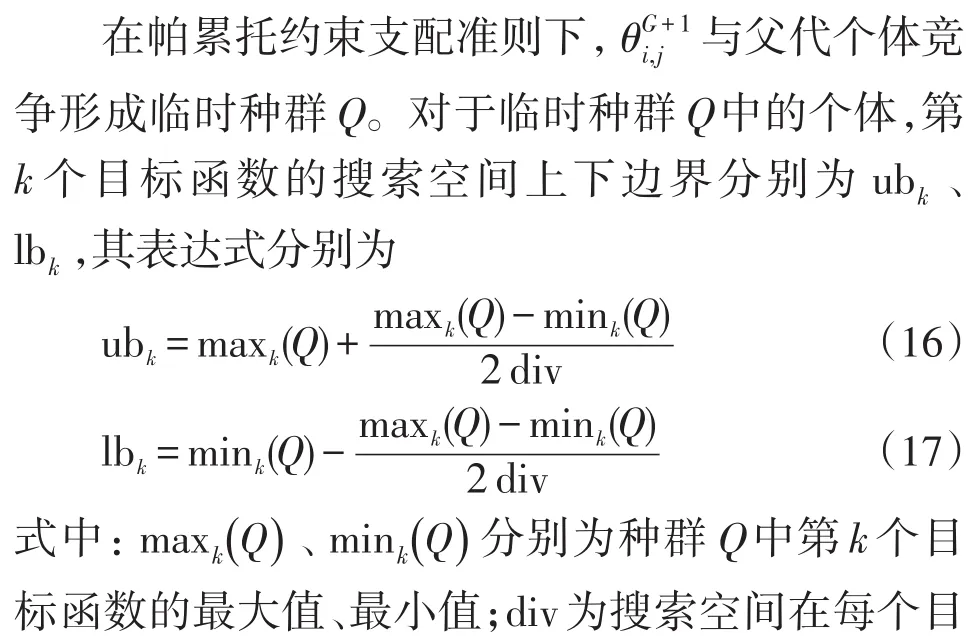
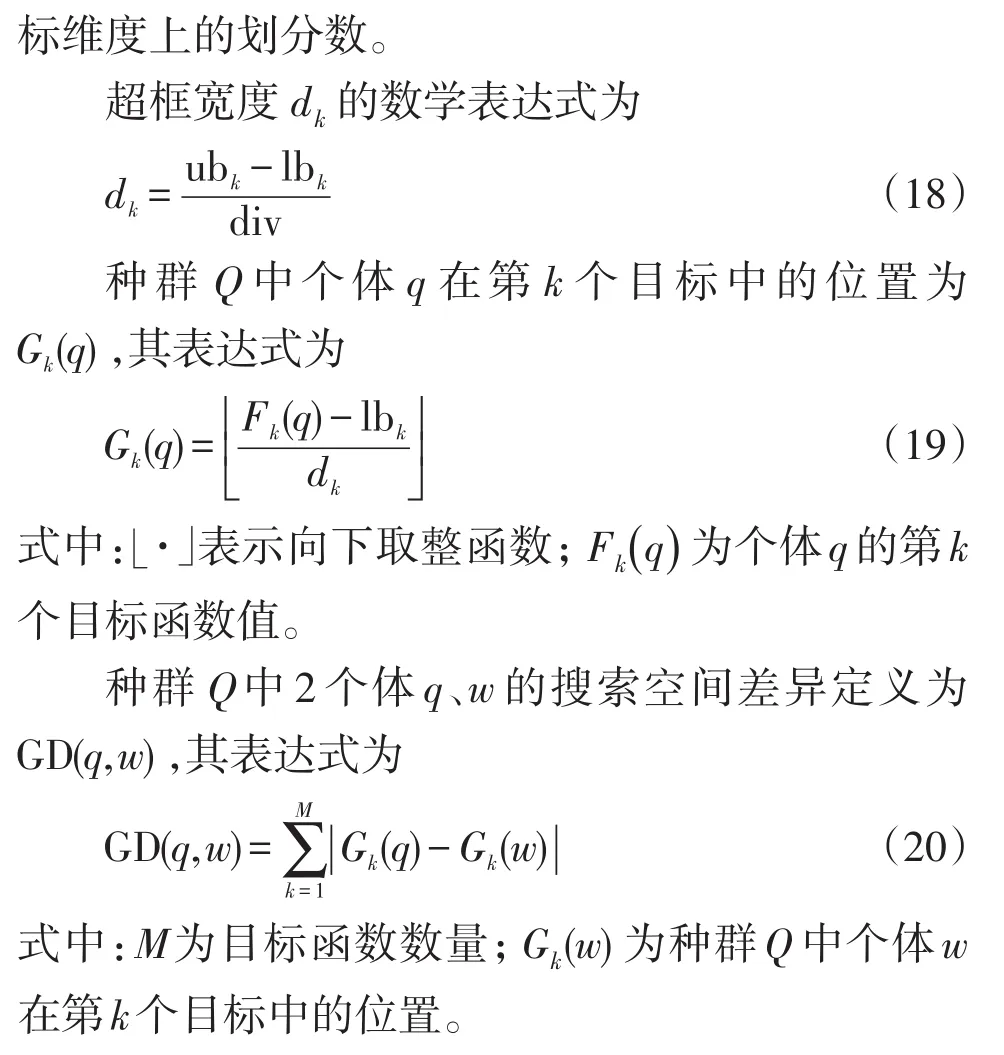
2.2 生成動態(tài)搜索空間
2.3 選擇
為了使種群個體向著最優(yōu)目標進化并且能夠獲得帕累托前沿面分布均勻的個體,個體的適應度計算應包含收斂性和多樣性方面的信息[19]。本文考慮了3個基于動態(tài)搜索空間的標準來計算個體q的適應度并進行快速非支配排序[20],3個標準分別為搜索空間等級GR、搜索空間擁擠距離GCD、搜索空間點距GCPD。GR和GCD的表達式分別為
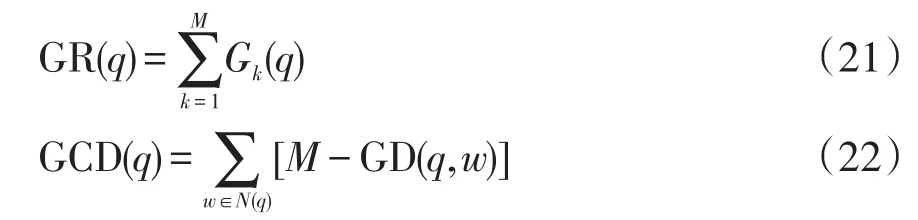
式中,N(q)表示q的鄰集。GR和GCD在個體的收斂性和多樣性方面提供度量,由于計算基于個體的超框坐標且都為整數(shù),可能無法完全區(qū)分所有個體。因此提出以個體q與其所處超框頂點的歸一化歐式距離作為適應度比較的補充,即搜索空間點距GCPD。GCPD主要評估個體的收斂性,其表達式為

2.4 改進Tent映射的混沌種群初始化及參數(shù)K、RF的動態(tài)調整
初始種群直接影響進化算法的收斂速度和尋優(yōu)精度,隨機初始化種群無法確保種群在搜索空間中均勻分布[21],將混沌序列和進化算法融合可使初始種群具有更好的多樣性,避免陷入局部最優(yōu)[22]。混沌序列的生成方式有多種,其中Tent映射生成序列均勻性更好[23],然而Tent映射生成的混沌序列存在小周期和不確定周期點的不足。文獻[24]在傳統(tǒng)Tent映射中添加隨機變量加以改善,其數(shù)學表達式為
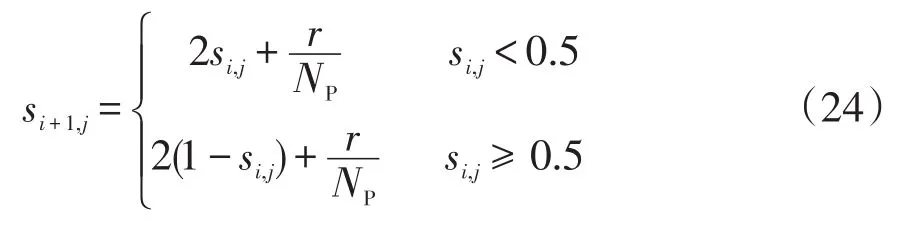
式中:si,j為生成初始種群前混沌矩陣中的元素;s1,1,s1,2,…,s1,D為D個0-1之間的隨機數(shù);i=1,2,…,NP;j=1,2,…,D;r為0-1之間的隨機數(shù);NP為種群規(guī)模。混沌序列逆映射數(shù)學表達式為

式中,UBj、LBj分別為決策變量xi,j的上限、下限。改進Tent映射的混沌種群初始化步驟如下。
步驟1隨機生成D個0-1之間的隨機數(shù),形成初始序列s1=(s1,1,s1,2,…,s1,D)。
步驟2根據(jù)式(24)生成混沌矩陣S為
步驟3利用式(25)將式(26)混沌矩陣中的元素逆映射,得到初始種群。
式(14)和式(15)中K和RF的初始值取0-1之間的隨機數(shù),之后的迭代過程采用式(24)進行動態(tài)調整。
2.5 算法流程
在得到帕累托前沿后,為分析本文所提模型在優(yōu)化支路穩(wěn)定性能方面的效果,采用優(yōu)劣解距離法TOPSIS(technique for order preference by similarity to an ideal solution)[25]求取調和解。
采用CMODE/DSS算法求解模型的流程如圖1所示。
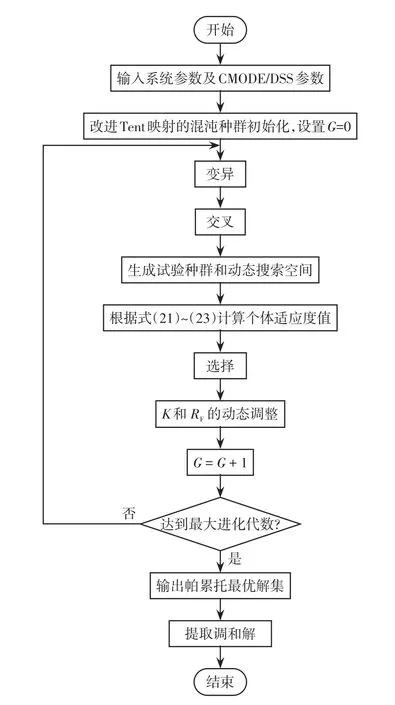
圖1 CMODE/DSS算法流程Fig.1 Flow chart of CMODE/DSS algorithm
3 算例分析
反向世代距離IGD(inverted generational distance)不僅可以評價EAMO的收斂性,還可以評價帕累托前沿中個體的均勻分布性,IGD值越小說明算法得到的帕累托前沿收斂性越好、分布越均勻[19]。為測試CMODE/DSS的整體性能,在Matlab平臺采用IGD與6種EAMO,即多目標帕累托采樣算法 MSOPS(multiple single objective Pareto sampling)[26]、基于 ?支配的多目標進化算法 ?-MOEA(epsilon-domination based multi-objective evolutionary algorithm)[27]、基于分解的多目標進化算法MOEA/D(multi-objective evolutionary algorithm based on decomposition)[28]、基于網(wǎng)格的進化算法GrEA(grid-based evolutionary algorithm)[29]、基于超體積估計的快速多目標優(yōu)化算法HypE(fast hypervolumebased many-objective optimization)[30]、基于偏好排序的多目標進化算法POGA(preference ordering based genetic algorithm)[31]。在M=4的多目標測試函數(shù)DTLZ1(Deb Thiele Laumanns Zitzler/1)[32]、DTLZ2上進行比較,種群規(guī)模為50,最大迭代次數(shù)為100 000,6種EAMO的結果取自文獻[26-31],比較結果如表1所示。
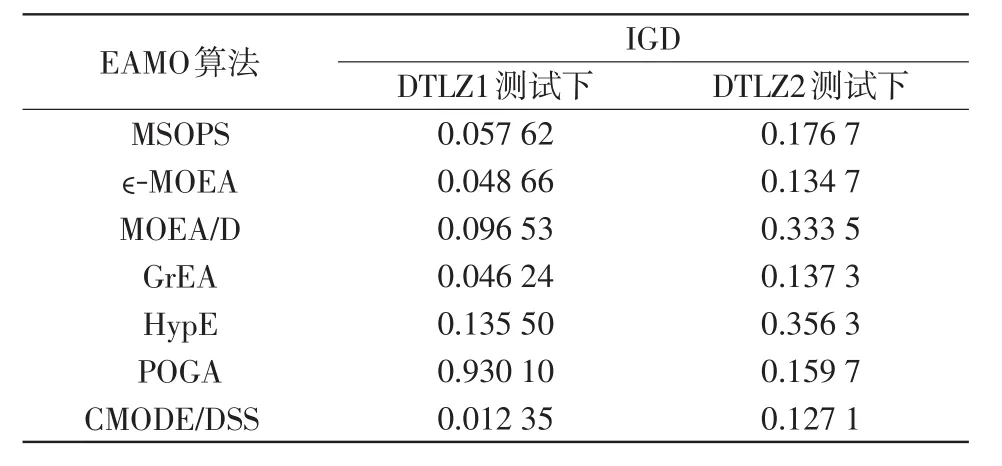
表1 CMODE/DSS 與6種EAMO在DTLZ1、DTLZ2中的IGD比較Tab.1 Comparison of IGD among CMODE/DSS and six kinds of EAMO in DTLZ1 and DTLZ2
由表1計算結果可知,相比于其他6種EAMO,CMODE/DSS的IGD值最小,說明CMODE/DSS搜索到的帕累托最優(yōu)解集在目標空間中的分布較為均勻且收斂性較好。
以IEEE 30節(jié)點系統(tǒng)為算例,系統(tǒng)如圖2所示,系統(tǒng)含有1個風電場(位于20節(jié)點)、6臺火電機組(分別位于1、2、5、8、11、13節(jié)點)、41條支路。機組和系統(tǒng)參數(shù)參照文獻[33],如表2~4所示。風電場數(shù)據(jù)參照文獻[34],風電預測出力如圖3所示。
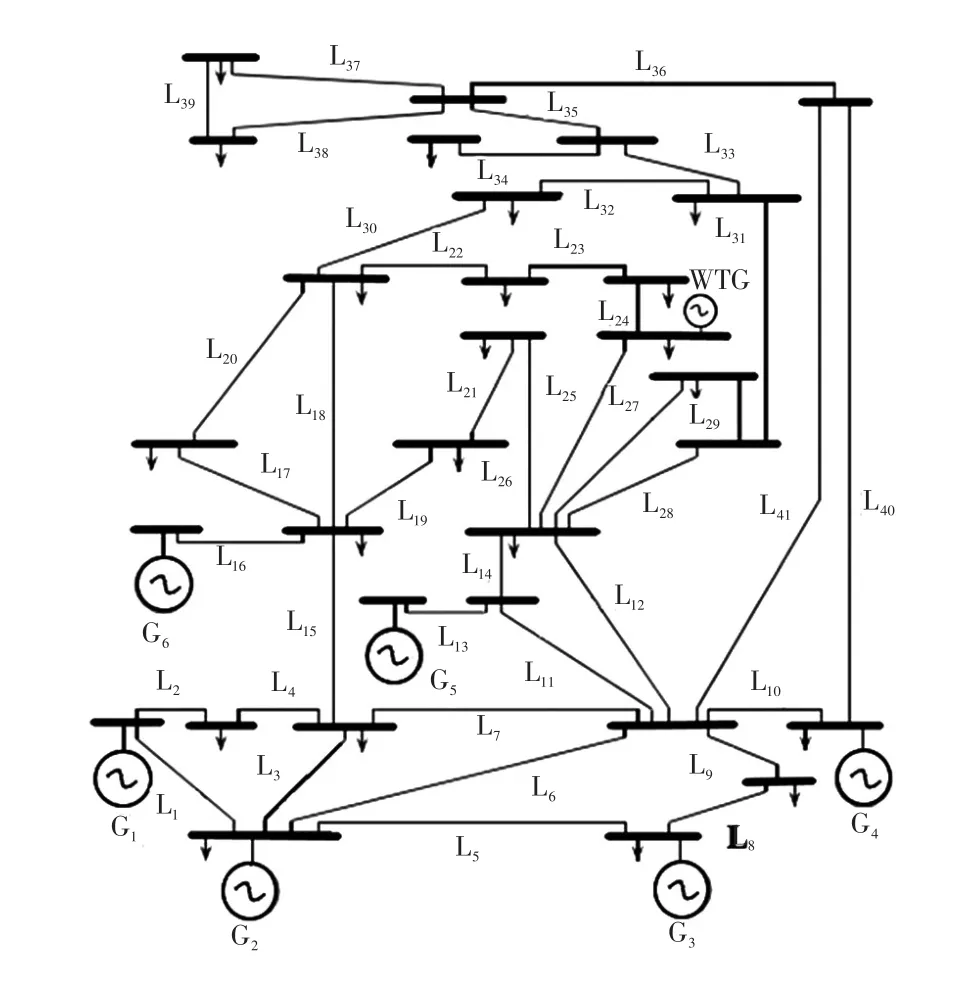
圖2 IEEE 30節(jié)點系統(tǒng)Fig.2 IEEE 30-node system
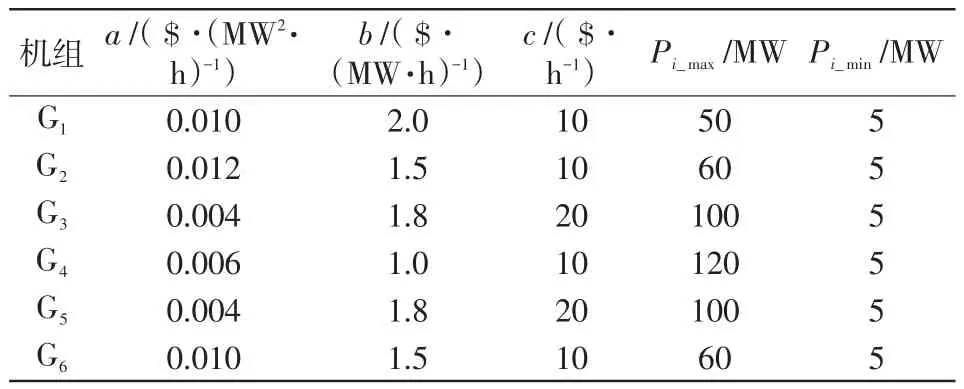
表2 機組煤耗系數(shù)及出力限制Tab.2 Unit coal consumption coefficient and output limit
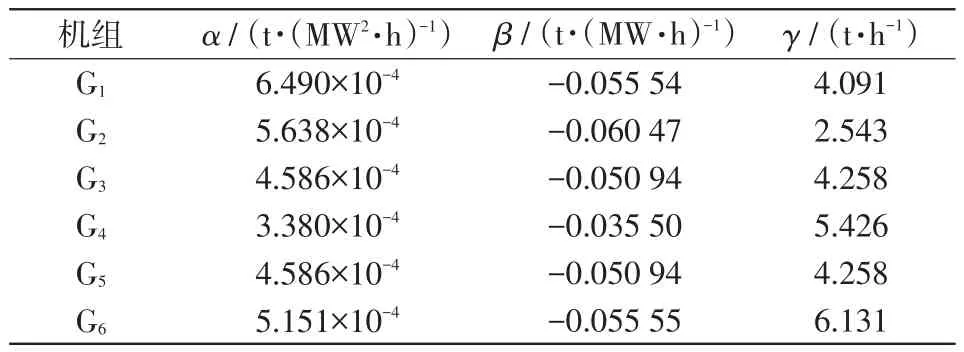
表3 機組二氧化碳排放量系數(shù)Tab.3 Unit carbon dioxide emission coefficient
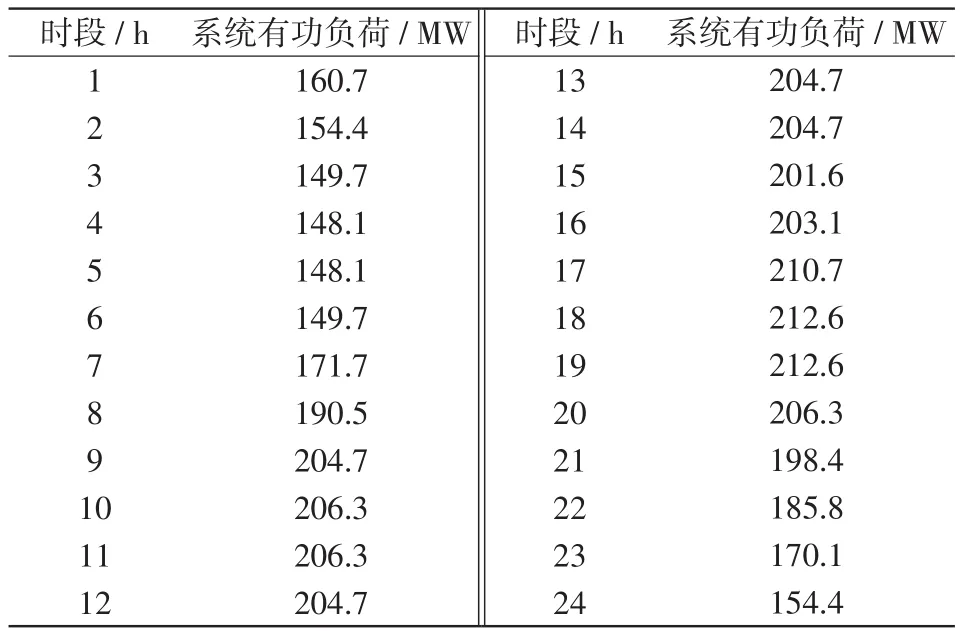
表4 系統(tǒng)有功負荷Tab.4 System active load
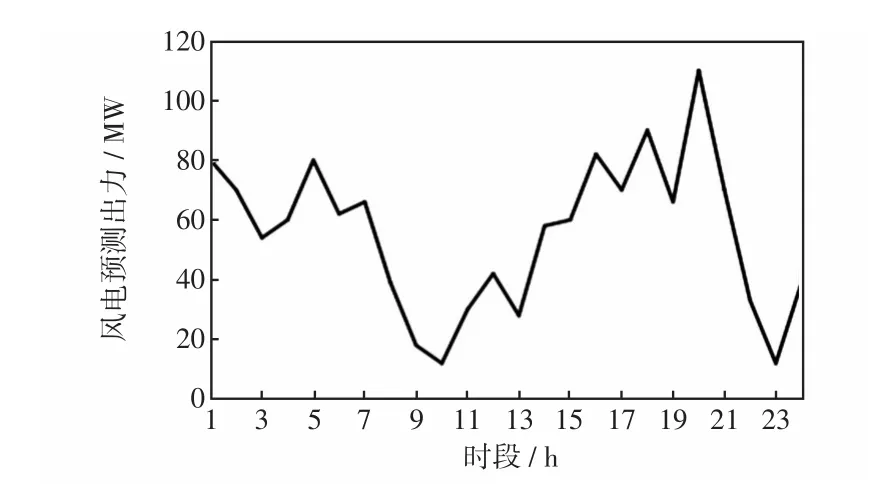
圖3 風電預測出力Fig.3 Forecasted wind power output
CMODE/DSS求解模型得到的帕累托前沿如圖4所示,目標函數(shù)Z線性映射到圖4中圓圈的體積,圓圈體積越小表示Z越小。
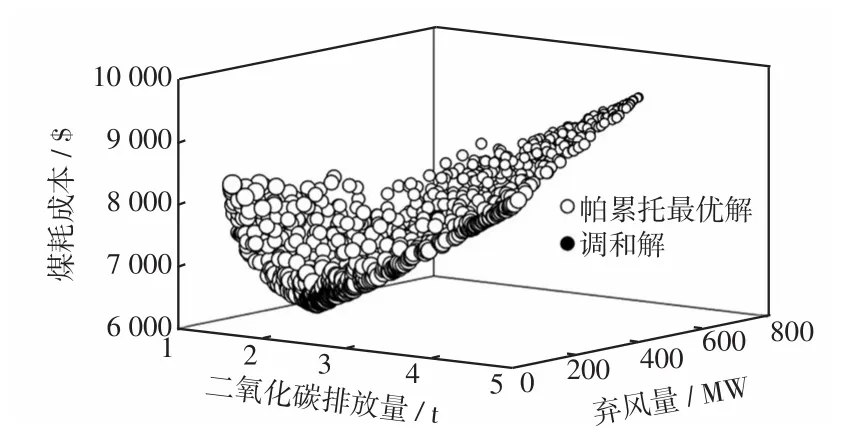
圖4 4目標帕累托前沿Fig.4 Four-goal Pareto frontier
從圖4可以看出,Z總體上隨煤耗成本的增加而降低,隨棄風量的增加而降低,隨二氧化碳排放量的增加而先增加后降低。綜合考慮4個目標時,風電并網(wǎng)減少了火電機組所需出力,因此棄風量的減少帶來煤耗成本的降低,然而風電在系統(tǒng)各運行時段的出力隨機性導致支路潮流分布不均,個別支路長時間運行在高負載率下,致使系統(tǒng)協(xié)調性指標Z變大。同時系統(tǒng)內各火電機組二氧化碳排放系數(shù)和煤耗系數(shù)存在差異,若盡可能調用二氧化碳排放少的機組會無法兼顧經(jīng)濟性與協(xié)調性,導致煤耗成本及Z的增加。
定義目標函數(shù)為最小化煤耗成本、棄風量、二氧化碳排放量的3目標調度模型為模型1;目標函數(shù)為最小化煤耗成本、棄風量、二氧化碳排放量、運行協(xié)調性的4目標調度模型為模型2。
模型1調和解中重載支路的負載率及模型2優(yōu)化后的支路負載率如圖5和圖6所示。
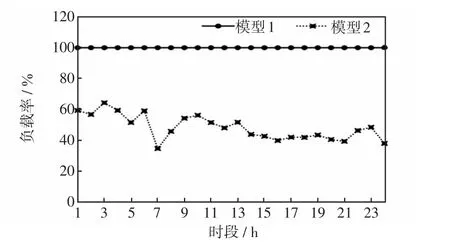
圖5 支路10的負載率Fig.5 Load rate of Branch 10
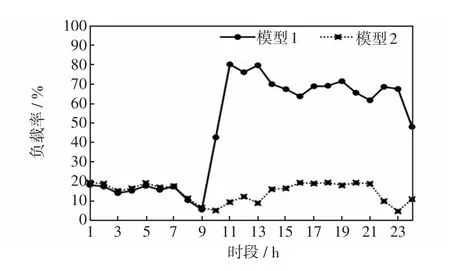
圖6 支路21的負載率Fig.6 Load rate of Branch 21
從圖5和圖6可以看出,模型1下支路10在24個時段內均滿載,支路21在時段11的負載率高達80.2%;模型2優(yōu)化后,41條支路在24個時段內無滿載、重載狀態(tài),支路負載率最高為64.4%,支路10在24個時段內的負載率均降低至65%以下,支路21在時段11的負載率降低至9.4%。盡管模型1受支路安全約束的影響沒有過載運行,但有支路長時間處于滿載狀態(tài),不利于系統(tǒng)安全穩(wěn)定。模型2考慮了函數(shù)Z的影響,滿載、重載程度得到了有效緩解。
使用兩種模型調度方案,進一步研究預想故障對系統(tǒng)安全運行的影響,并且在不導致系統(tǒng)解列的前提下開斷高負載率的支路10。采用表征支路功率越限嚴重程度的性能指標PIP作為評價指標[35、36],其表達式為

式中,δL為運行時段內過負荷支路集合。
開斷支路10后,模型1調和解中超載支路的負載率及模型2優(yōu)化后的支路負載率如圖7和圖8所示。
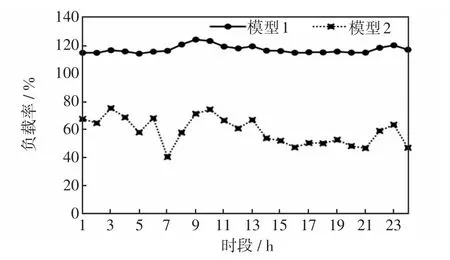
圖7 支路40的負載率Fig.7 Load rate of Branch 40
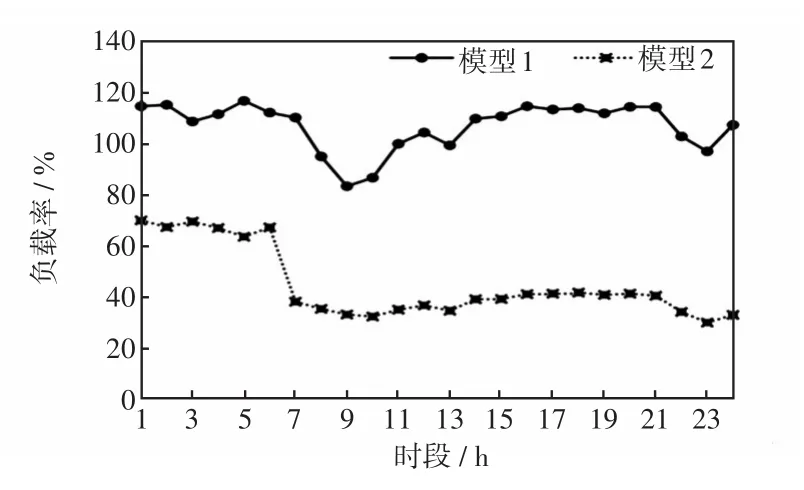
圖8 支路41的負載率Fig.8 Load rate of Branch 41
從圖7和圖8可以看出,開斷支路10后,模型1下支路40在運行時段內均超載,支路41在運行時段內或超載、或重載運行,預想故障下的系統(tǒng)處于緊急狀態(tài),原系統(tǒng)運行在不安全狀態(tài);模型2優(yōu)化后,預想故障下所有支路在運行時段內無超載、滿載,支路負載率最高為75.5%,預想故障下的系統(tǒng)處于安全正常運行狀態(tài),原系統(tǒng)運行在安全正常狀態(tài)。
為便于比較分析,計算出了模型1調和解的Z值,模型1和模型2調和解的目標函數(shù)值對比結果及開斷支路10后的性能指標PIP如表5所示。

表5 不同模型下調和解的各目標函數(shù)值Tab.5 Value of each objective function in the harmonic solution under different models
從表5可以看出,模型2的煤耗費用略微增加(18$/h),二氧化碳排放量與棄風量基本維持不變,系統(tǒng)Z值由1.903下降為0.771;模型1在預想故障下出現(xiàn)了不同程度的支路過載且PIP值較大,模型2的PIP值為0,在預想故障下各支路均未出現(xiàn)過載,表明各支路功率分布更為均勻,支路運行的安全性能提高。由此說明,模型2的優(yōu)化需要犧牲一定的經(jīng)濟利益,但是會極大地提高系統(tǒng)安全穩(wěn)定、協(xié)調運行的水平。
4 結論
本文針對傳統(tǒng)調度策略導致部分支路運行重載甚至過載的問題,構建了同時考慮經(jīng)濟性、節(jié)能性、清潔性和運行協(xié)調性的多目標機組組合優(yōu)化模型,提出了一種CMODE/DSS算法,得到以下結論。
(1)從支路潮流均勻分布的角度提出系統(tǒng)運行的協(xié)調性指標,在此基礎上構建的綜合考慮系統(tǒng)運行經(jīng)濟節(jié)能、清潔環(huán)保、安全穩(wěn)定的調度模型將調度運行中滿載支路的負載率由100%降低至65%以下,將預想故障中超載支路的負載率由120%降低至80%以下,PIP由49.3降低至0,有效提高了系統(tǒng)運行的安全性。
(2)CMODE/DSS算法在差分進化的尋優(yōu)機制中構建動態(tài)搜索空間,以及采用改進Tent映射的混沌種群初始化和變異、交叉概率的動態(tài)調整策略,提高了算法的收斂性與帕累托前沿個體的均勻分布性,提高了進化算法的全局搜索能力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24