濾波誤差攝動動態(tài)系統(tǒng)的無記憶狀態(tài)反饋控制器設計
2022-04-25 14:07:52吳越
白城師范學院學報 2022年2期
吳 越
(吉林師范大學 數(shù)學學院,長春130000)
0 引言
不確定性時變時滯奇異攝動系統(tǒng)源于工業(yè)生產(chǎn)等控制領域中的應用,現(xiàn)在已經(jīng)成為現(xiàn)代控制科學的一個重要研究領域.關于系統(tǒng)的濾波器設計已有了比較詳盡的研究,例如,文獻[1]研究了含有不確定結構的時變時滯奇異攝動連續(xù)系統(tǒng)的濾波誤差動態(tài)系統(tǒng)的穩(wěn)定性分析問題,文獻[2]得到了連續(xù)系統(tǒng)的時滯依賴和時滯獨立兩種不同情形下的濾波誤差動態(tài)系統(tǒng)穩(wěn)定性的判別條件形式等等.在上述文獻中對連續(xù)系統(tǒng)的濾波誤差動態(tài)系統(tǒng)穩(wěn)定性分析問題的討論較為詳細,眾多學者對線性時滯控制系統(tǒng)中的濾波器設計問題展開了研究,取得了許多成果[3-4],但并未涉及濾波誤差動態(tài)系統(tǒng)其他層面的研究.
本文運用線性矩陣不等式方法,主要對奇異攝動時滯濾波誤差動態(tài)系統(tǒng)的控制器設計問題進行研究,對帶有控制輸入的奇異攝動時滯濾波誤差動態(tài)系統(tǒng),設計無記憶狀態(tài)反饋控制器[5],借助于Lyapunov穩(wěn)定性理論和線性矩陣分析,構造一個新的Lyapunov 泛函,利用交叉項界定方法,推出控制器在時滯依賴和時滯獨立情況下的充分性判據(jù).
1 問題描述和引理
1.1 奇異攝動時滯濾波誤差動態(tài)系統(tǒng)概述
首先考慮帶有干擾輸入的不確定時變時滯奇異攝動控制系統(tǒng)


其中:τ,μ是已知實常數(shù);F(t)∈Ri×j是范數(shù)有界的不確定系統(tǒng)模型參數(shù)矩陣,具有如下范數(shù)有界不確定性結構

在如下濾波器

的作用下,形成如下濾波誤差動態(tài)方程為

考慮帶有控制輸入和干擾輸入的奇異攝動時滯濾波誤差動態(tài)系統(tǒng)
其中:u(t)∈Rm是控制輸入向量;B是已知的適當維數(shù)的實常矩陣.
1.2 線性不等式理論及相關引理
引理2[7]對于適當維數(shù)的矩陣E,D和對稱矩陣Y,若不確定矩陣F(t)滿足FT(t)F(t)≤I,則Y+EF(t)D+DTFT(t)ET<0的充分必要條件是存在常數(shù)η>0,使得Y+ηEET+η-1DTD<0.
2 控制器設計
設計一個無記憶狀態(tài)反饋控制器

其中:K為未知的控制器增益矩陣.則閉環(huán)系統(tǒng)為

2.1 時滯依賴的控制器設計
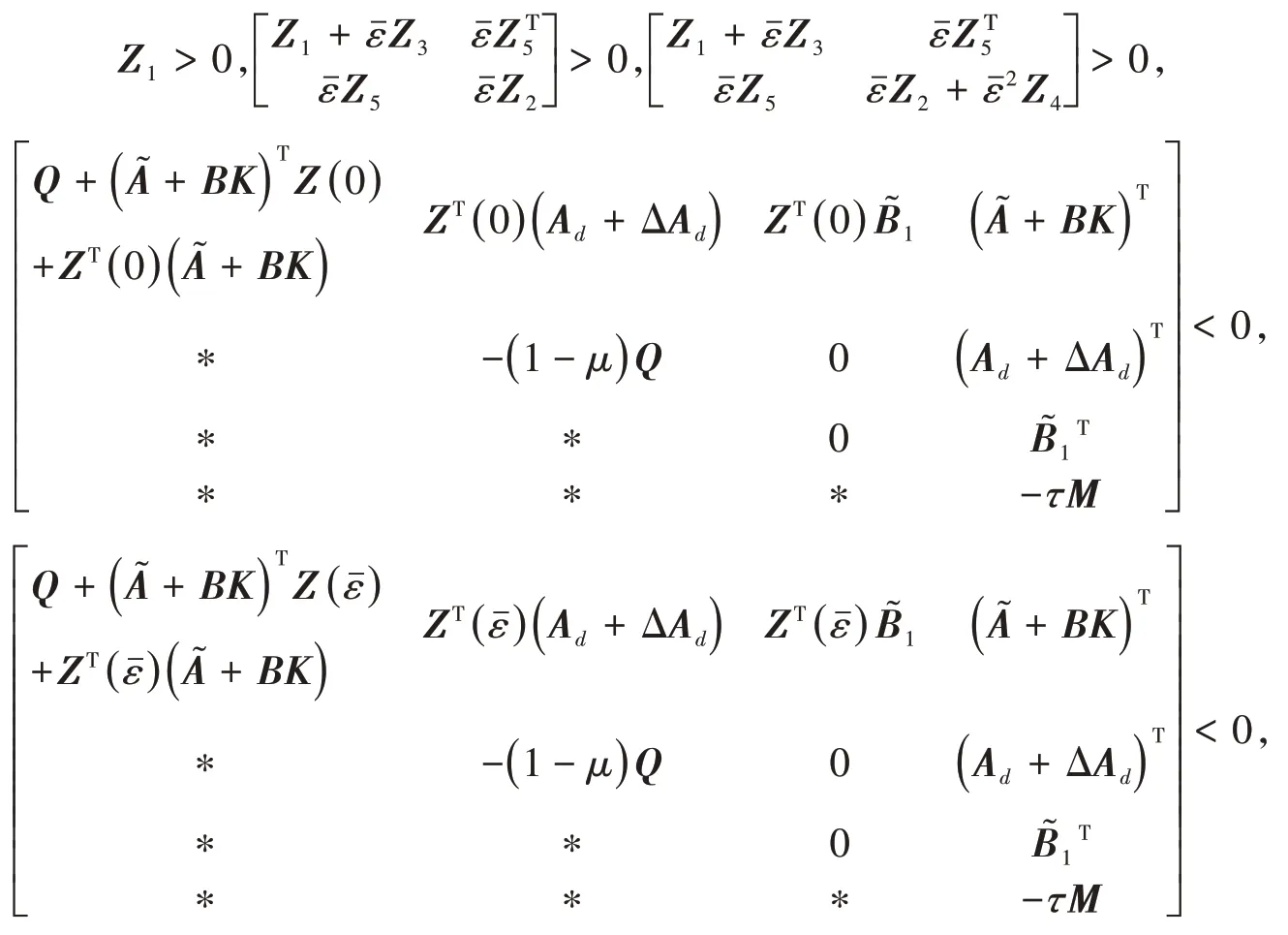

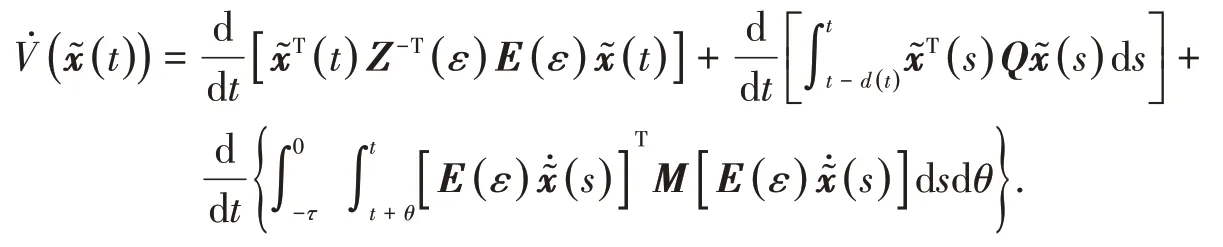
證明 構造函數(shù)V(x?(t))=V1(t)+V2(t)+V3(t),
其中:

其中:

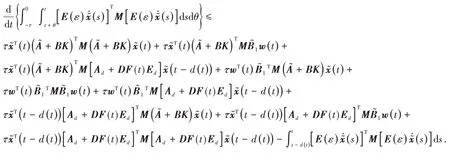
因此

其中:


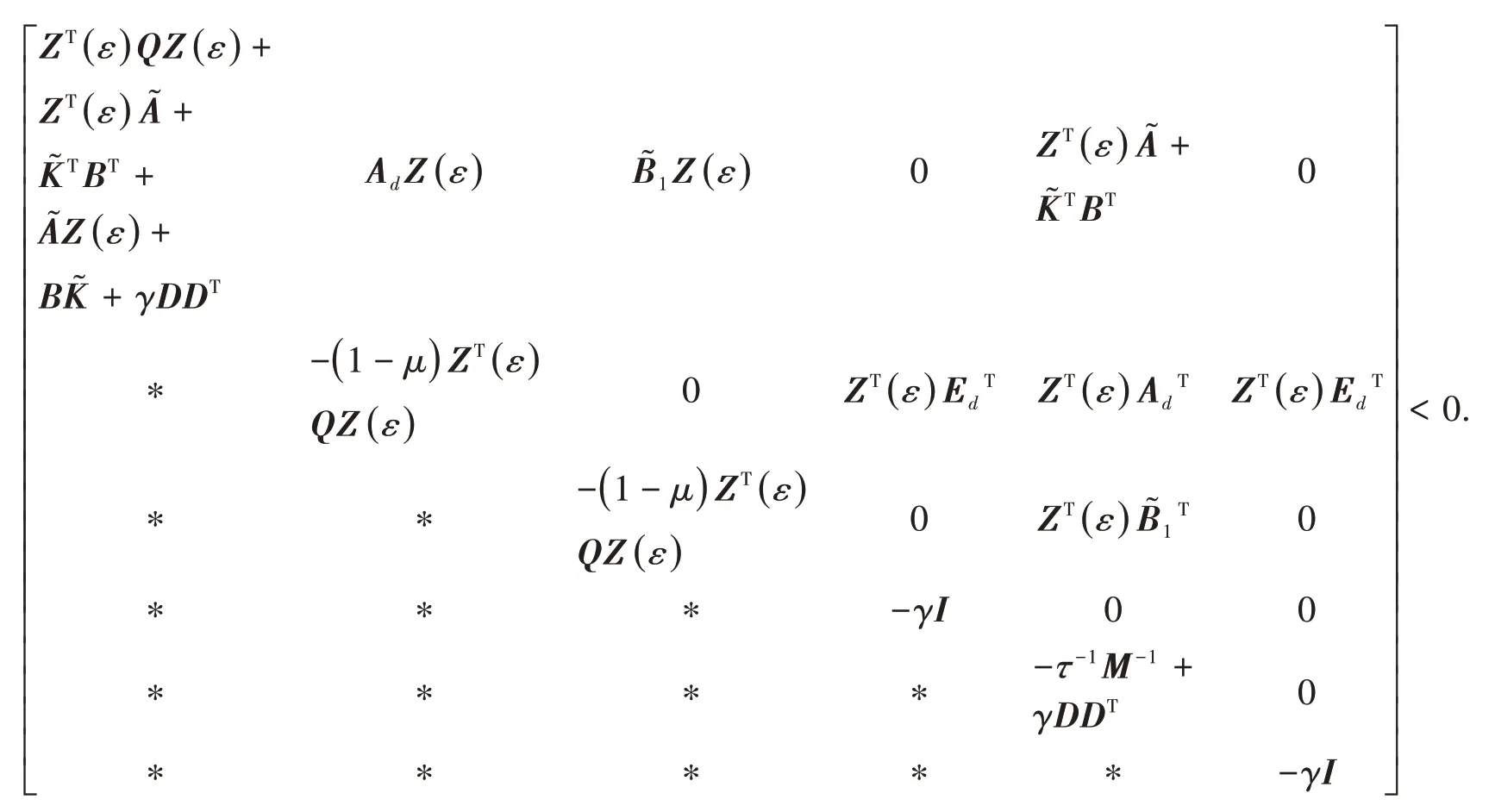
令ΔAd=DF(t)Ed,則由引理1,G(ε)<0等價于
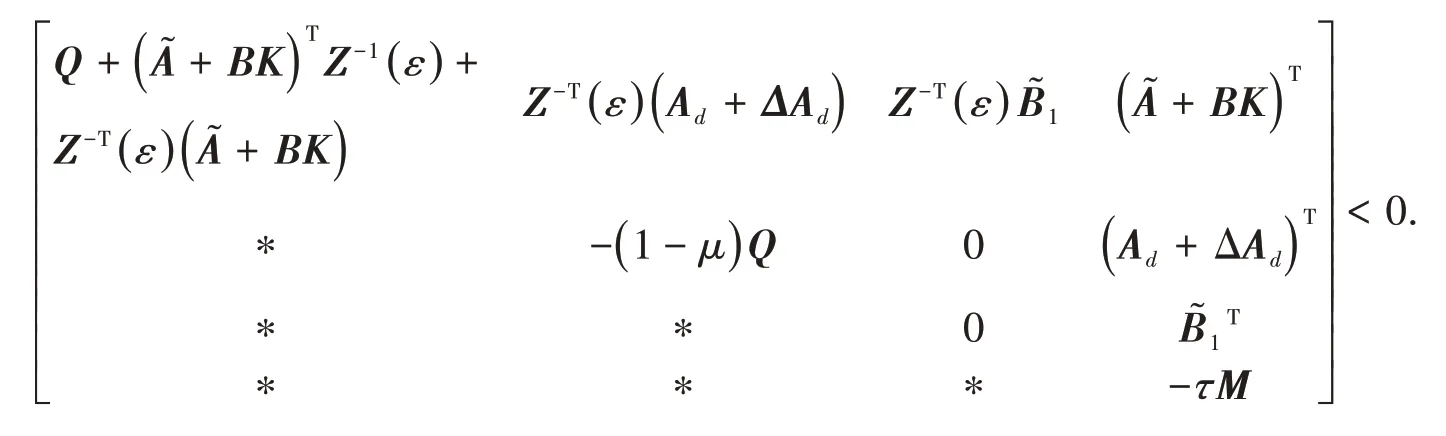
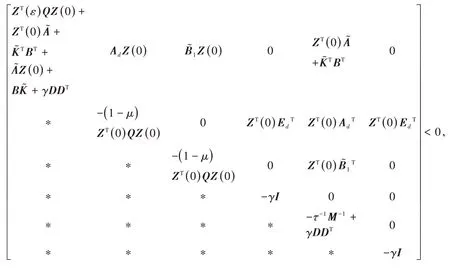
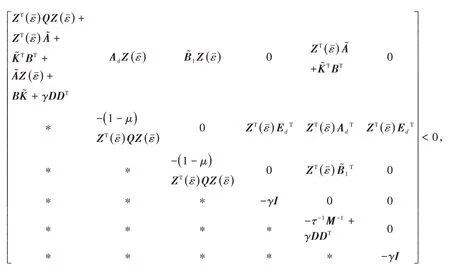
由線性矩陣不等式條件知,G( 0 )<0,G()<0.根據(jù)引理3,得G(ε)<0,因此?((t))<0,根據(jù)Lyapunov穩(wěn)定性理論,系統(tǒng)漸近穩(wěn)定.
為了求得控制器參數(shù),需要去掉不確定函數(shù)F(t),使得G(ε)<0.對G(ε)<0 左乘對角矩陣diag{ZT(ε)ZT(ε)ZT(ε)},右乘其轉置,記KZ(ε)=?,再由引理1,存在一個常數(shù)γ>0,得



2.2 時滯獨立的控制器設計
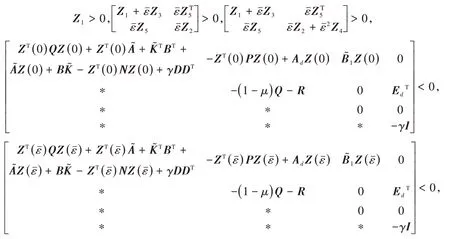
定理3 給定>0,濾波誤差動態(tài)系統(tǒng)對?ε∈( 0,)是漸近穩(wěn)定的.若存在對稱正定矩陣Q>0,適當維數(shù)的矩陣P,對稱陣N,P,以及≥0,矩陣Zi(i= 1,2,3,4,5 )且Zi=(i= 1,2,3,4 ),使得不確定性函數(shù)滿足條件( 3 ),則下列矩陣不等式條件可行

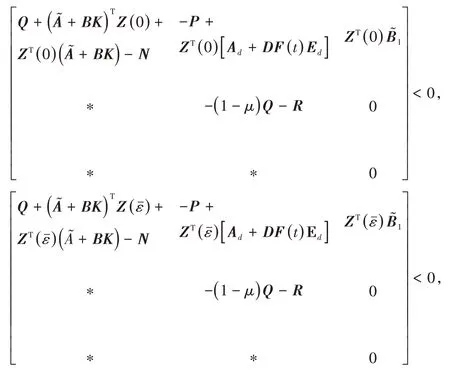
則u(t)=Kx(t)為系統(tǒng)( 6 )的靜態(tài)狀態(tài)反饋控制器,其中:K=?Z-1(ε),?ε∈( 0,].
證明 構造函數(shù)V(x?(t))=V1(t)+V2(t),
將V((t))沿著閉環(huán)系統(tǒng)的任意軌跡微分,得

證明方法與定理1類似,故略.
定理4 給定>0,濾波誤差動態(tài)系統(tǒng)對?ε∈( 0,)是漸近穩(wěn)定的.若存在對稱正定矩陣Q>0,適當維數(shù)的矩陣P,對稱陣N,R以及≥0,γ>0,矩陣Zi(i= 1,2,3,4,5 )且則下列矩陣不等式條件可行
3 結論
本文對奇異攝動時滯濾波誤差動態(tài)系統(tǒng)進行無記憶狀態(tài)反饋控制器系統(tǒng)設計研究,構造適當?shù)腖yapunov泛函,使濾波誤差動態(tài)閉環(huán)系統(tǒng)漸近穩(wěn)定,推出時滯依賴和時滯獨立情形下的濾波誤差動態(tài)系統(tǒng)的控制器設計定理,該系統(tǒng)綜合性較高,盡可能減弱了時滯相關結論保守性的問題.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
