智能巡檢多足機器人的巡檢路徑規劃設計
2022-04-20 06:01:40黃軍輝謝武濤
廣東農工商職業技術學院學報 2022年1期
黃軍輝,謝武濤
(廣東農工商職業技術學院 智能工程學院,廣東 廣州 510507)
為了節省勞動力成本,提升農業產出效益,農業生產正逐步向自動化、智能化方面發展[1]。當今世界,智能機器人正在逐漸取代傳統的勞動力,農業生產智能化已成為一種趨勢[2]。由于種植環境對農作物的生長至關重要,種植人員必須實時監測溫度、濕度、光照強度等與作物生長發育有關的環境信息數據,以保證農作物的產量,因此研發現代智慧農業智能巡檢多足機器人對協助農作物的種植有著重要的作用[3]。為滿足栽培環境較為復雜的農作物巡檢需求,本文設計出農作物智能巡檢多足機器人,用于日常農作物種植巡檢使用。
一、智能巡檢多足機器人系統總體設計
(一)智能巡檢多足機器人整體結構設計
智能巡檢多足機器人移動平臺在原機體基礎上,其六條腿以上下、前后的分布式計算臺放置,在基礎內設置有舵機控制驅動板、攝像機頭、LED 照明、IMU 姿態感應器等,基本機構設計簡圖如圖1所示。在智能巡檢多足機器人基礎的尾部設計有充電口、USB 電壓口和電源開關,原機體基座上預留有多孔板,方便安裝搭載樹莓派(見圖2)、激光雷達(見圖3)及其他傳感器等。智能巡檢多足機器人結構件采用硬質鋁合金、碳纖維板材和POM 多種材料有機組合,滿足結構強度要求的同時保證智能巡檢多足機器人整體輕便。
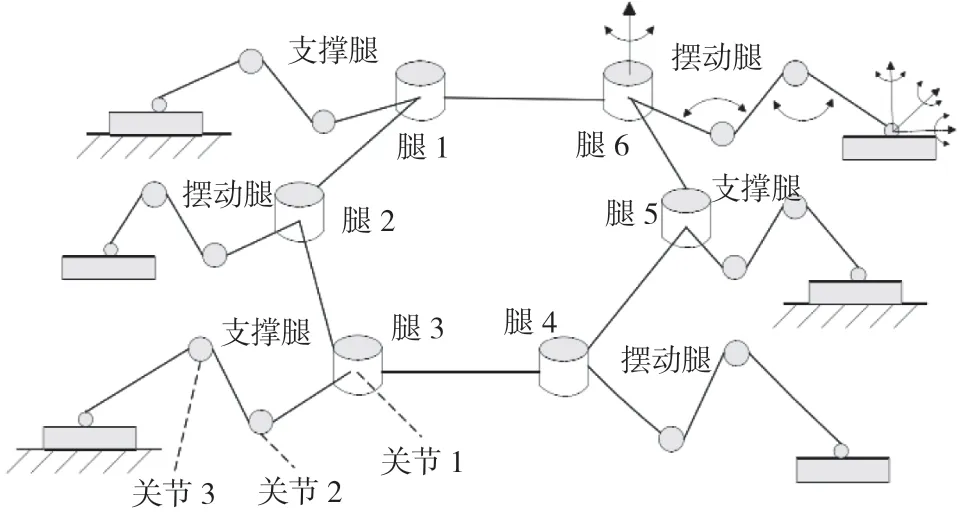
圖1 多足機器人機構設計簡圖

圖2 樹莓派Pi3 B+實物
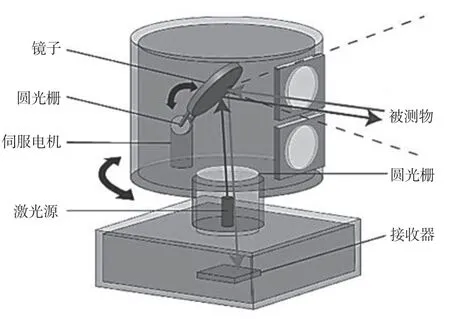
圖3 激光雷達圖
(二)智能巡檢多足機器人系統結構設計
智能巡檢多足機器人的系統由車身主體部分、服務器和監控客戶端組成,機器人將監測的溫度、濕度、光照強度和位置信息傳輸給服務器。客戶端可以通過與服務器交互進行查詢當前農作物生長環境情況,掌握農作物的生長狀況;還可以對曾保存的農作數據進行分析。
(三)智能巡檢多足機器人腿結構設計
目前國內的巡檢類機器人多為輪式移動平臺,在復雜環境下其移動和越障能力有限,且對環境適應性不強。在自然中,節肢動物在奔跑時對自然環境適應能力強,對于仿生機器人的研究人員來說它們的身體結構與運動步態具有重要的研究意義與價值[4]。特別是在崎嶇不平的道路上,腿式自動化機器人也有著特殊的優越性,根據這樣的優越性,可設計出一款能在復雜環境下對農業生產環境巡檢的智能巡檢多足機器人。該智能巡檢多足機器人采用六條腿的多足機器人作為移動平臺,并采用激光SLAM 的構圖和導航。智能巡檢多足機器人的腿機械結構設計參照了節肢動物的關節,將六條腿通過對稱結構布置于車身左右兩側,從而降低了在智能巡檢多足機器人巡檢行走過程中環境對行走的干擾。智能巡檢多足機器人每條腿有三個自由度,可以通過六條腿中的十八個自由轉動副腳進行靈活運動,在行進過程中的平穩性得到進一步提高。根據蜘蛛等節肢動物的腿部結構設計為3 個關節(如圖4 所示),關節1 將機器人的機身與腿連接,并負責進行腿部擺腿的動態。為避免行走時腿與腿之間的干擾,第一個關節轉動范圍設置為120°,第二個關節轉動范圍設置為180°,第三個關節轉動范圍設置為150°。

圖4 多足機器人單腿結構設計簡圖
二、智能巡檢多足機器人硬件結構圖
智能巡檢多足機器人機械結構采用6 條腿的蜘蛛式的底座,車架采用的是鋼結構,采用24V 直流電源供電,保證了該機器人在面對復雜環境時能夠順利通過(如圖5 所示)。

圖5 智能巡檢多足機器人
智能巡檢多足機器人硬件電路部分選用主要包括電源系統、舵機驅動板、IMU 傳感器、RBG 燈模塊、電量檢測模塊、藍牙模塊、樹莓派主控系統、激光雷達和攝像頭模塊。農業用智慧巡查小車[5]使客戶端能夠在機器巡檢過程中遠程查詢所采集到的各種數據,但該智慧車輛的軌跡追蹤系統使用的是傳統的黑色跟蹤路線,這對車輛的紅外線感應器要求很高,且穩定能力也不好。而智能巡檢多足機器人采用樹莓派的主控運行ROS 操作系統,能夠根據激光雷達信號與IMU 傳感器信號實現SLAM 技術(Simultaneous Localization And Mapping)的實時自動定位控制和版圖建立,進行自動化機器人巡檢時的自動定位和導航。ROS 作為機器人開發的元操作系統,在智能巡檢多足機器人的設計開發中具有十分廣泛的應用。在巡檢系統上,采用了固定式的農產品日常巡檢系統,其好處是不但增加了穩定性,同時也顯著增加了農產品的總體經濟效益,但必須在各種果園或耕地上配置感應器,導致生產成本提高[6]。上海大學趙晨宇等人提出了一種基于模糊控制計算的農產品車輛軌跡追蹤方法,并開展了模擬試驗。他們發現該算法的運算量較小,且計算速度快,能夠極大地提高車輛追蹤特性,但是由于模糊控制算法要求大規模的人類經驗來調整其特性,所以不適于大規模應用[7]。我們設計的智能巡檢多足機器人結合對農作物巡檢的需求,在ROS 操作平臺下進行SLAM 開發,確保移動機器人能夠在復雜的室外場景下工作,其中,ROS 主控依據導航信息做決策下發指令給STM32 舵機驅動板驅動機器人的相關腿執行相關動作,按照導航路線行走,攝像頭采集圖像并通過視頻ROS 節點由路由器網絡傳回PC 監控端[8]。其結構框圖如圖6 所示。
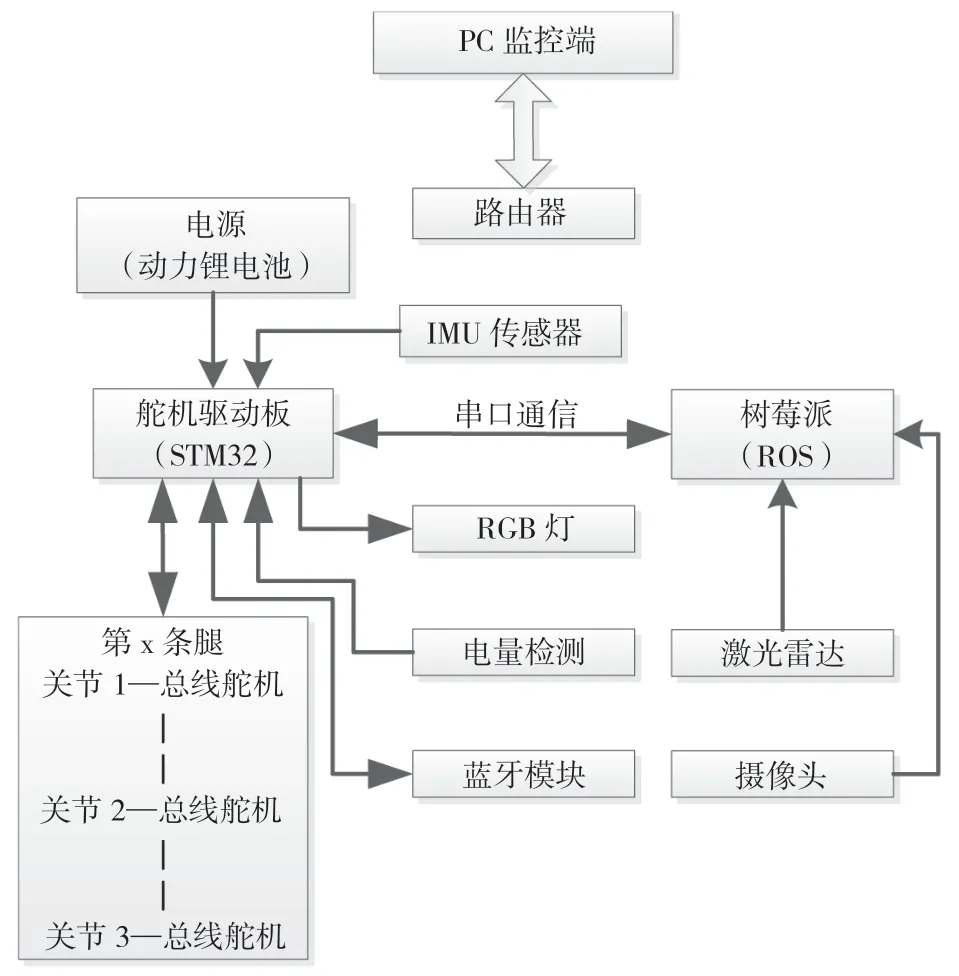
圖6 硬件電路結構框圖
三、智能巡檢多足機器人SLAM 與自主導航系統實現
(一)SLAM 算法與自主導航
SLAM 研究方法主要是運用于智能巡檢多足機器人的自主化移動,即智能巡檢多足機器人可以從未知環境中的任意地點出發移動,并在移動過程中利用算法和地圖得到自身定位,從而實時形成增量型的地圖,以達到機器人的主動定位與導航。激光雷達采集的數據進行建圖與定位流程如圖7 所示。

圖7 激光雷達采集的數據進行建圖與定位流程圖
SLAM 算法歷經三十余年的發展,現已獲得了相當突出的成績。其使用方式可以分成兩種:基于濾波器的方法和基于優化的方法。Gmapping 算法是一個最常用的基于濾波器的算法[9]。Gmapping算法存在的問題有更新效率低、閉環感知不足等。所以,本文選擇了Cartographer 計算作為標準建圖的計算。Cartographer 算法使用了基于圖像質量最大化的SLAM 理論架構,包括局部SLAM(前端)和全局SLAM(后端)。局部SLAM 技術主要負責圖像掃描與閉環測量。將經過圖像掃描的激光數據信息與子版圖加以匹配,進而得到一種表達模式的柵格地圖的子圖。一旦子圖中仍未加入,新的數據幀則會開始閉環檢測。在形成子圖之后,就會找到與當前所估算位姿相符的最優預測結果,并將其加入到閉環約束中。全局SLAM 技術主要利用分支定界法和預先設計的網格減少在局部SLAM 中累積的偏差,并實現全局閉環檢測。
智能巡檢多足機器人在航行流程中也離不開位置和路線規劃。通常,Dijkstra 和A*算法主要用來針對完整地圖和給定目的地計算的機器人全局路線規劃,以達到全局最佳解。局部路線計劃是指巡檢自動化機器人在全局路線運行中隨時會遭遇障礙物,當自動化機器人在現場移動時,就可以進行主動改變路線,防止與障礙物產生沖突。本文主要使用一個主move-base 功能包來進行自動化機器人位置規劃工作,在引導流程中可以使用蒙特卡洛定位算法進行計算自動化機器人位置圖上的位置。
(二)路徑規劃實驗
本文以實驗室附近綠地為基本環境,在其運動過程中,添加一些自然環境的障礙物,模擬田間的基本環境。通過使用ROS 中的Gmapping 功能包以及利用SLAM 算法,完成建圖工作,得到實驗場地的二維環境地圖,使用Dijkstra 和A*算法來針對完整地圖和給定目的地計算的智能巡檢多足機器人全局路線規劃,圖8 為規劃出的全局路徑。局部代價地圖隨著智能巡檢多足機器人的移動不斷更新,相應地局部路徑也發生改變,智能巡檢多足機器人能夠順利避開障礙物。通過Dijkstra 和A*算法進行路徑規劃工作,并在真實環境中進行實驗驗證,證明了采用該算法可以規劃出一條可以避開障礙且最優的路徑。
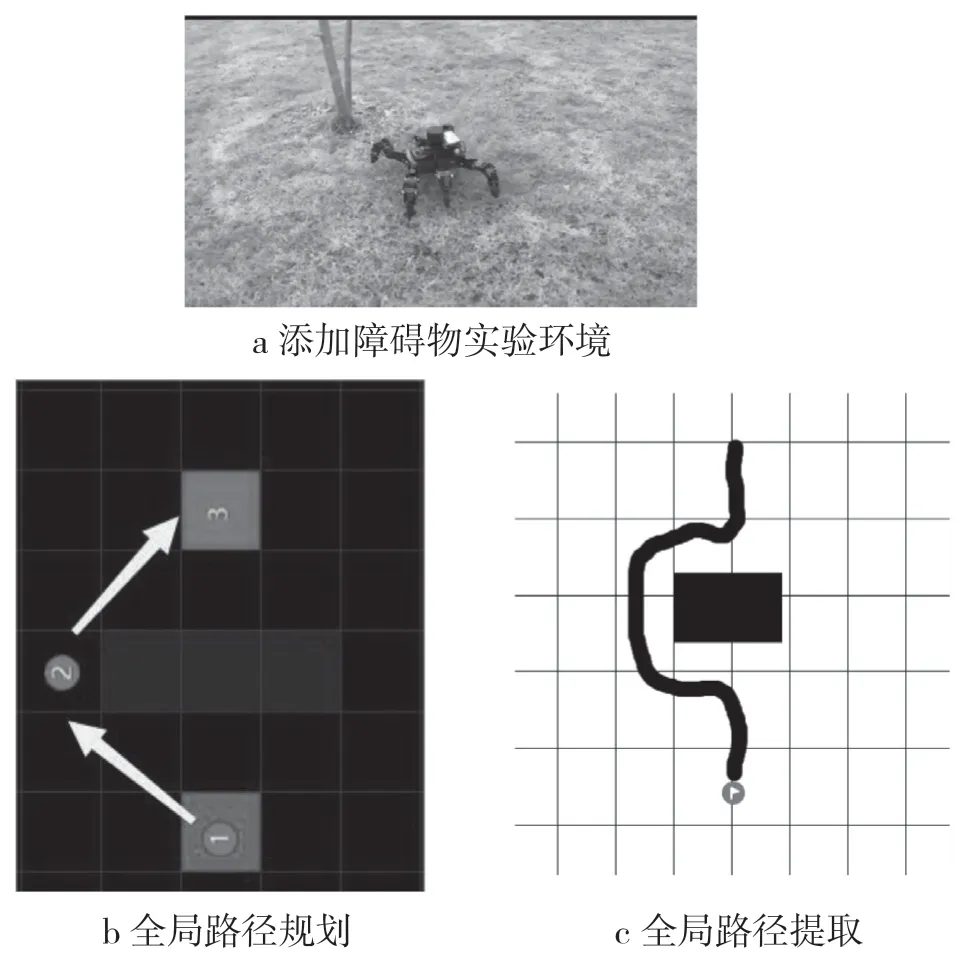
圖8 實驗環境及全局路徑規劃提取
四、結論
本文設計了一款基于SLAM 的構圖和導航的智能巡檢多足機器人,能夠在復雜的農業種植環境中,采用激光雷達SLAM 技術結合毫米波雷達方式完成自主執行路徑規劃、自主探索、導航等任務,可按既定巡檢路線自主導航完成巡檢任務,也可采用地面遙控方式完成對農作物的巡檢任務,探索了智能巡檢多足機器人在農業種植場應用的場景。后期將在激光雷達小型化、機器人步態控制算法優化、智能巡檢多足機器人輕量化設計方面進行改進研究,研發適用可面對更復雜環境的農作物巡檢機器人。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32