國產高分辨率衛星影像云檢測
2022-04-20 11:20:10劉燕張力王慶棟王春青韓曉霞
遙感信息 2022年1期
劉燕,張力,王慶棟,王春青,韓曉霞
(1.蘭州交通大學 測繪與地理信息學院,蘭州 730070;2.中國測繪科學研究院,北京 100036;3.青海省基礎測繪院,西寧 810001;4.地理國情監測技術應用國家地方聯合工程研究中心,蘭州 730070;5.甘肅省地理國情監測工程實驗室,蘭州 730070)
0 引言
隨著計算機技術、空間技術和信息技術的發展,遙感作為探索世界的重要手段,為人類的生存、繁榮和可持續發展提供服務。遙感數據作為地物目標識別和分類的主要數據源,其處理趨向于計算機自動化、智能化[1]。云作為正常的自然現象,覆蓋了地球表面百分之六十以上的區域,在獲取的遙感影像中存在大量區域被云覆蓋的現象,導致部分成像信息丟失[2],嚴重影響地物的識別和分類、影像匹配和鑲嵌等后期處理,也對影像的配準、融合等處理造成不便。因此,云的自動識別檢測是遙感影像數據處理中十分重要的過程。
云在遙感影像具有特殊的光譜特性,根據這種特性進行光譜測試,制定出最優閾值,從而檢測云區域,如在Landsat數據中廣泛使用的Fmask算法[3]和基于云的波譜特性,尤其在紅外波段的特性對MODIS數據進行云檢測等方法[4]。這些方法需要影像具有較多波段,對于單波段或紅綠藍三波段的影像并不適用。故研究者提出基于較少波段(四個波段以下)的遙感影像云檢測方法,這些方法可分為物理方法、基于紋理和空間特性的方法及模式識別三種方法[5]。物理方法是對遙感影像的灰度值進行灰度均值、方差等的統計和計算,結合動態閾值、自適應閾值等方法檢測云區域[6-8],如周雪珺等[9]將遙感影像切分成小塊子圖,統計子圖的灰度均值和方差,根據閾值將云進行分類,快速地進行云檢測;陳振煒等[10]將影像分成小塊,根據影像的二階矩值和一階差分退化率的閾值將影像分為有云影像和無云影像。這種方法可以快速地進行云檢測,但單純依賴于遙感影像的灰度特征,對于具有復雜地物的遙感影像有可能會檢測失誤。基于遙感影像紋理和空間特性的方法是通過圖像灰度共生矩陣、LBP等算法揭示云的紋理特征,并結合閾值算法得到云檢測結果[11],如黃宇[12]提出一種改進的 Itti 顯著性模型,并研究云層和下墊面樣本的各類紋理特征,利用較少波段信息快速有效地實現遙感影像云檢測;董志鵬等[13]提出一種基于對象光譜與紋理的高分辨率遙感影像云檢測方法,通過均衡化影像直方圖、簡單線性迭代聚類算法、紋理均值及角二階矩等方法獲得良好的影像云檢測結果,由于云的種類較復雜,因此難以準確地區分與云紋理相近的地物。模式識別中的支持向量機、監督分類、深度學習等方法可以獲得較好的云檢測結果[14-15],如赫英明等[16]提出了基于支持向量機的遙感影像分類方法,分析了云檢測過程中的特征提取和選擇,建立了基于支持向量機的遙感影像分類模型,可將云與陸地、水體、積雪準確地區分;高軍等[17]以全卷積神經網絡為基礎進行云檢測,利用其自動提取深層隱含特征等特性保留特征信息,最后結合全連接條件隨機場模型進行云系邊緣優化獲得效果好的云檢測結果。但這種方法需要大量的云檢測樣本且受限于對訓練樣本的依賴,對于與樣本反差較大的遙感影像效果不太理想。
基于上述原因,本文通過分析遙感影像中云區域光譜和紋理特征,提出一種快速、普適性強的多源高分辨率遙感影像云檢測方法。綜合多項式閾值法和大津法的優勢,提出了一種聯合閾值分割算法,不僅能夠檢測多云影像,而且解決了少云影像無法檢測的問題,從而提高云檢測的正確率。同時根據類云地物邊緣梯度值變化大而云邊緣區域變化平滑的特點實現了類云地物的去除。
1 理論基礎
1.1 影像云判別
影像直方圖可以表示數字圖像中亮度分布,標繪出圖像中每個亮度值的像素數。將彩色影像轉為灰度影像,并做直方圖統計,為了更直觀地顯示,將縱坐標(像素數量)歸一化到0~255。從圖1中可以看出,當影像中含有云區域時,直方圖大致呈“大U”形,且分布主要集中在橫坐標[200,255]區間內,縱坐標不為零。從圖2中可以看出,當影像不含云時,
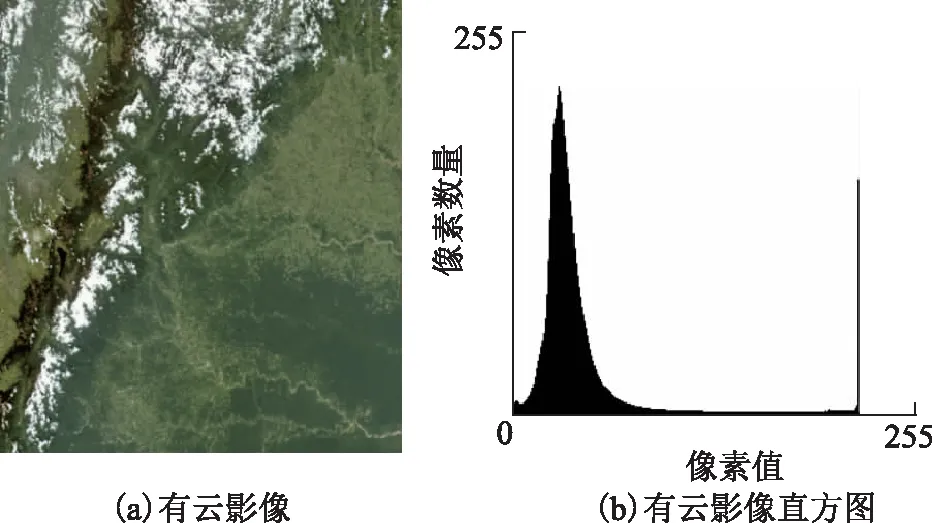
圖1 有云遙感影像和直方圖
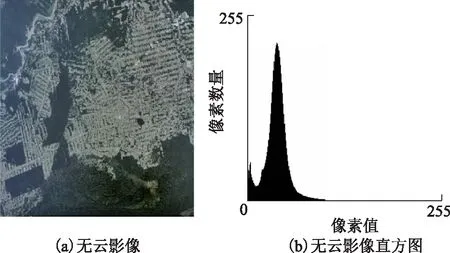
圖2 無云遙感影像和直方圖
直方圖分布主要聚集在橫坐標[200,255]區間內,縱坐標為零。由此,本文根據直方圖橫坐標在大于直方圖閾值(TH=230)時,縱坐標是否有值,將影像區分為有云影像和無云影像。
1.2 梯度增強
如圖3所示,遙感影像云區域邊緣像素值較中心區域小,但與非云區域的像素值相差較大,因此為了提高云范圍檢測準確率,對影像進行梯度增強,增強云邊緣區域強度。將灰度影像和梯度影像按照0.7和0.3的權重進行疊加并拉伸到0~255,得到梯度增強影像,如圖3所示,梯度增強后的影像云過渡區域和云層較薄區域得到明顯增強。
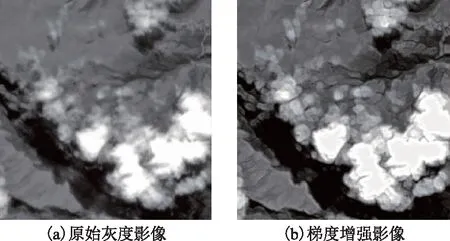
圖3 梯度增強對比圖
1.3 聯合閾值分割
大津法又稱為最大類間方差法,是經典的閾值分割算法,經常用于遙感影像中云、陰影和水體等提取,它是基于某一閾值將圖像直方圖的灰度像素分為兩類,計算兩類的類間方差,通過不斷迭代,使得類間方差達到極小值,從而得到閾值。類間方差法對噪聲和目標大小十分敏感。當目標與背景的大小比例懸殊,比如云量較少,或者同時有水體和陰影等多種地物的遙感影像時,閾值難以確定,如圖4(b)和圖5(b)所示,大津法閾值分割將部分地物誤檢測為云。
多項式擬合直方圖閾值分割法是用五次多項式對直方圖曲線通過最小二乘的計算方法進行曲線擬合,倒序排列求擬合曲線的第一個最小值作為閾值,進行影像分割。這種方法對于檢測云量較少的遙感影像效果較好。對于有大量水域的影像,大津法檢測效果較差,將大部分陸地誤檢測為云區域,而多項式閾值分割方法可以較準確地分割出云區域,如圖5(c)所示。但是多項式閾值分割對于云過渡區域檢測效果不理想,如圖6(c)所示,多項式閾值分割法只能檢測出云的主體區域,無法檢測云邊緣過渡區和云量較薄區域,相反,如圖6(b)所示的大津法能夠對以上情況進行檢測。因此,當云區域較大時,大津法檢測效果要優于多項式閾值分割法,當云區域較小時,大津法效果要劣于多項式閾值分割法。
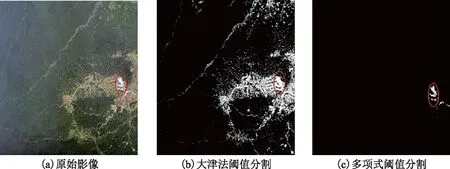
圖4 少云影像閾值分割

圖5 有水域影像分割
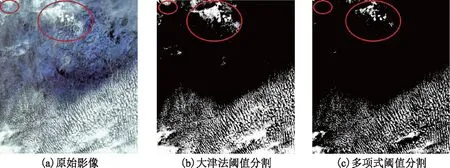
圖6 多云圖像閾值分割
統計原始影像中云區域的平均灰度值,并生成云樣本平均灰度離散圖(圖7),發現99%的云區域平均灰度值都大于閾值(TA2=150),根據這個特性可驗證聯合分割閾值云檢測結果的正確性。85%云區域的平均灰度值大于閾值(TA1=180),故用TA1驗證Otsu閾值分割的正確性。本文首先選用大津法閾值分割,通過計算原始影像中閾值分割云結果區域的灰度均值,作為驗證檢測結果是否正確的條件。如果檢測出來的云區域灰度均值小于TA1,表明大津法閾值分割錯誤,重新選用多項式擬合直方圖閾值分割。最終,如果云區域灰度均值小于TA2,則進一步進行分塊迭代云檢測。
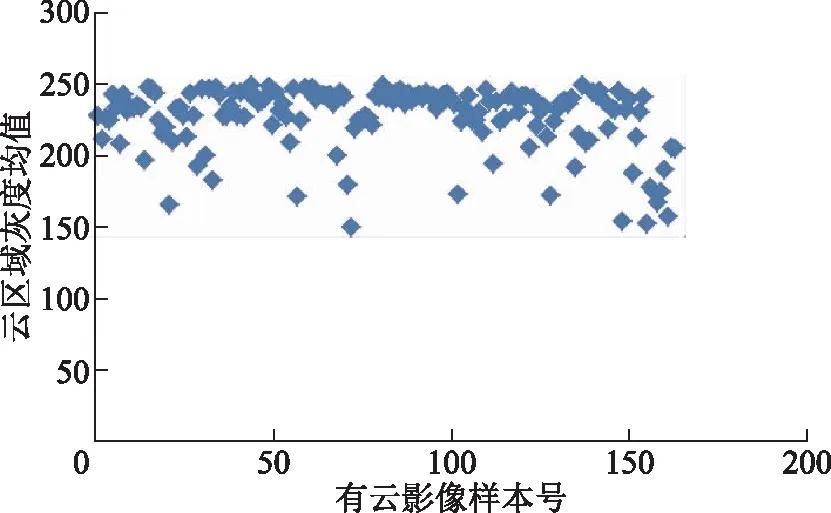
圖7 云樣本平均灰度值散點圖
1.4 波段光強差誤檢測區域去除
云作為一種特殊的自然形態,具有較強的反射率,在遙感影像上為白色,對于具有三波段以上的影像,在紅、綠、藍三個波段上的強度差異較小,根據樣本計算得出云區域的像素色彩強度差值都小于閾值(TRGB=25),即(|紅-藍|<25)且(|紅-綠|<25)且(|綠-藍|<25))。根據這個特性,可進一步將云和類云地物區分,如圖8所示。

圖8 根據紅綠藍波段色彩差值去除類云地物
1.5 邊緣梯度類云地物去除
遙感影像云檢測中云與類云地物(包括白色的建筑物、巖石、冰、雪等)的區分一直是一個技術難題。云由于種類不同,具有不同的形態和灰度特征,類云地物也由于氣候、地形的復雜具有不同的特征。如圖9(a)所示,云區域從中心到邊界呈現慢慢過渡,從厚變薄,顏色從白色過渡到地面顏色;如圖9(b)所示,邊界清晰的白色類云地物邊界顏色過渡較快,在五個像素內就從白色過渡為地面顏色。因此,根據上述特征,針對其中邊界清晰的冰雪和建筑物可以制定算法區分云和類云地物。
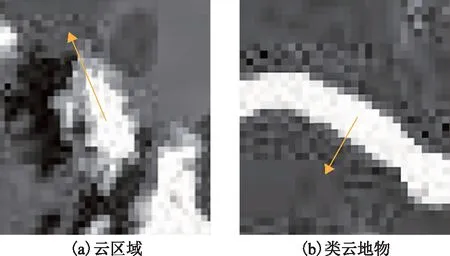
圖9 云與類云地物影像
像素值變化的快慢,即圖像邊緣梯度可作為判斷準則。如圖10所示,分別為云區域和類云地物從中心到邊緣像素值的變化圖。可以看出,邊界清晰的白色地物灰度值變化劇烈,故梯度值大;而云邊界變化緩慢,故梯度值較小。
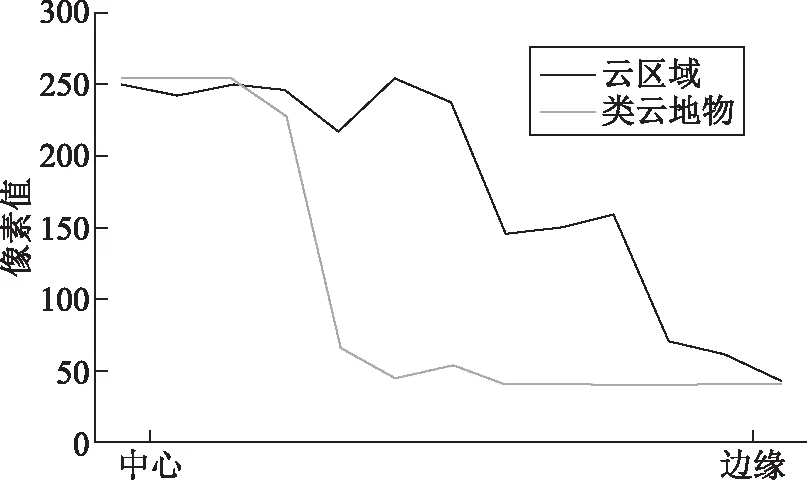
圖10 過渡區域灰度值變化圖
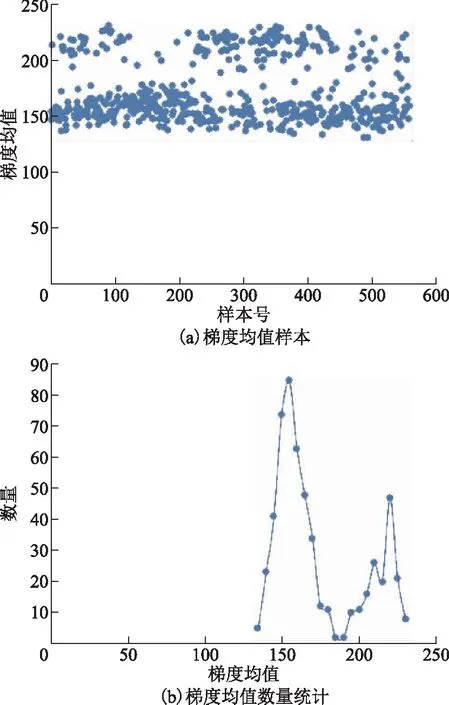
圖11 單獨云塊過渡區梯度均值統計
根據云與類云地物過渡區域,計算過渡區域原始影像的梯度值,同時統計出每個單獨云塊和類云塊,即單獨連通域邊緣的梯度均值。如圖11(a)所示,橫坐標為單獨過渡區域的樣本號,豎坐標為單獨過渡區域的梯度均值,從圖中可以看出梯度均值分為上下兩大類,并且中間有明顯的間隔,故推斷出云過渡區域的梯度均值為下部分,類云地物過渡區域的梯度均值為上部分。對梯度均值的數量進行統計,如圖11(b)所示,畫出梯度均值數量的曲線圖,曲線有兩個波峰,梯度均值小的波峰為云區域,梯度均值大的波峰為類云區域,兩個波峰之間的波谷最低點即為區分云和類云地物的閾值TG。
2 算法描述
根據上述分析,本文提出了一種針對多類型的國產高分辨率衛星影像云檢測算法,主要分為四個部分:影像云判別、大津法和多項式擬合直方圖聯合云分割、波段光強差誤檢測區域去除和邊緣梯度類云地物去除,如圖12所示。
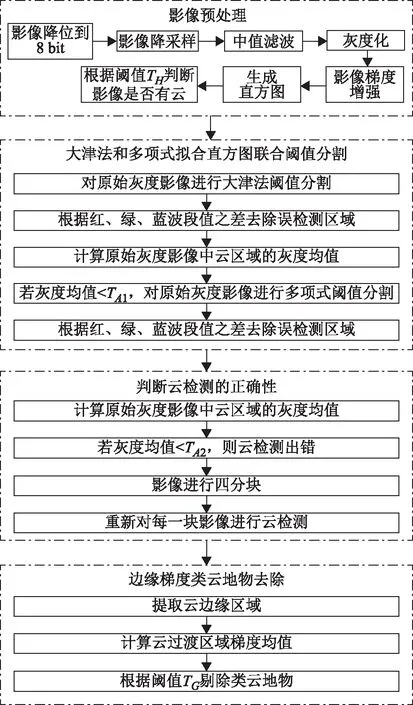
圖12 算法流程圖
具體步驟如下所示。
第一步影像預處理。首先,將影像降位到8 bit并四倍降采樣,以減少數據量;其次,對影像進行中值濾波去除噪聲,生成彩色影像A;然后,將影像A轉化為灰度影像,并計算灰度影像的梯度影像;最后,將灰度影像和梯度影像按照0.7和0.3的權重相加,得到梯度增強后的影像B并生成直方圖。如果當直方圖橫坐標大于TH時,縱坐標不為零,表明影像存在像素值大于TH的區域,則該影像為有云影像,否則為無云影像。
第二步大津法和多項式擬合直方圖聯合閾值分割。利用大津法對影像B進行閾值分割,得到初步云檢測結果。對于單波段影像,此步驟跳過,對于三波段以上影像,計算彩色影像A紅、綠、藍波段之間像素值之差,如果云檢測區域內像素值之差都大于TRGB,則判斷為非云區域并將其去除。通過計算云區域部分影像B的灰度均值來判斷云檢測結果是否正確,如果灰度均值大于TA1,則保留云初步檢測結果;如果灰度均值小于TA1,則表明大津法不適合該影像云檢測,則對影像B進行多項式閾值分割并根據閾值TRGB去除非云區域,剩下區域作為云初步檢測結果。
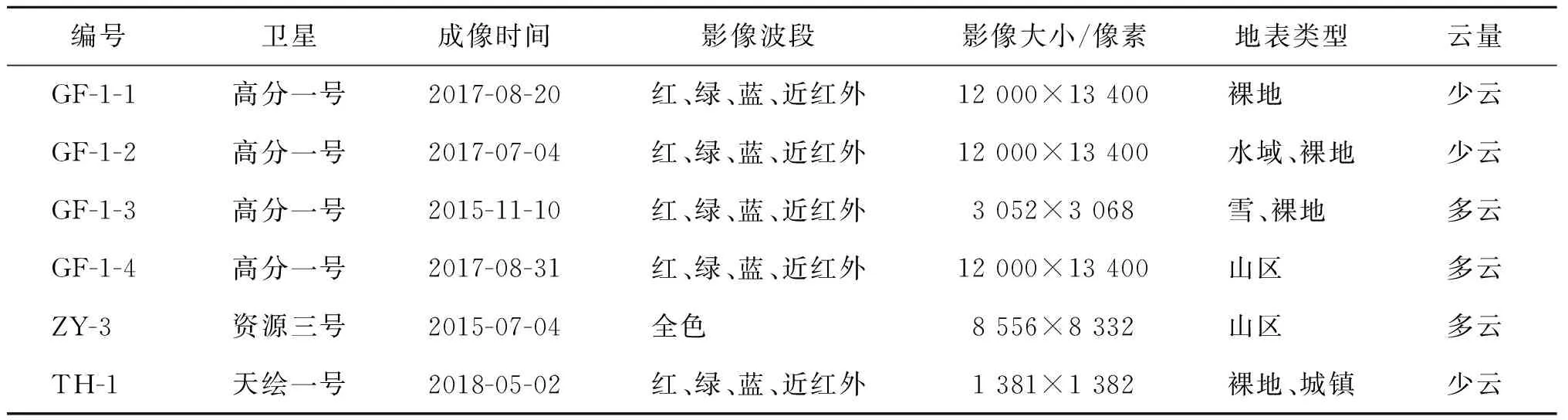
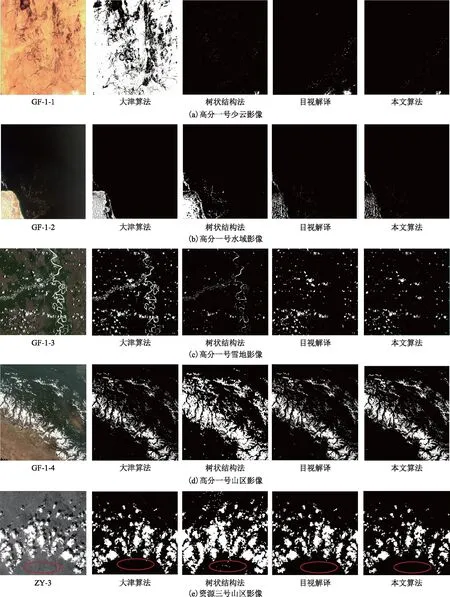
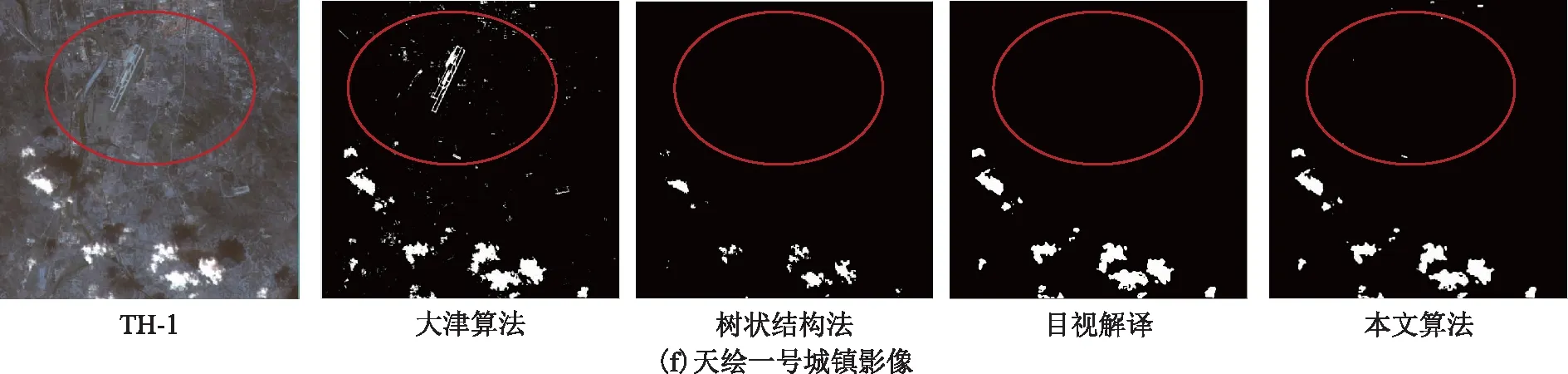
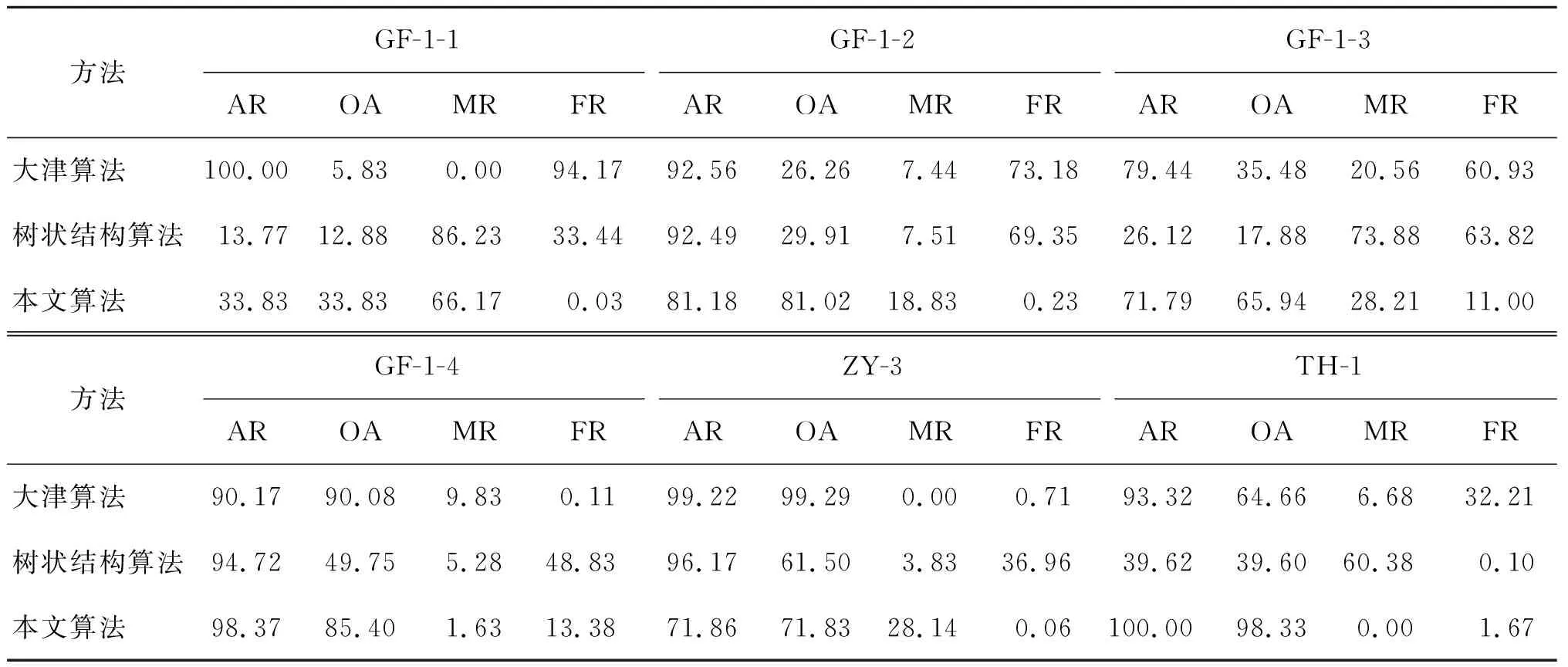
第三步判斷云檢測的正確性。計算云初步檢測區域內影像B的灰度均值,若灰度均值 第四步類云地物去除。對云檢測得到的二值圖像進行腐蝕運算,并與腐蝕前的二值圖像進行邏輯運算得到云過渡區域。計算影像B中每塊云過渡區域的梯度均值,如果梯度均值>TG,則表明該區域為類云地物,并將該區域去除;如果梯度均值≤TG,則該區域為云區域。 本文選用高分一號、高分二號、資源三號和天繪一號高分辨率影像數據進行實驗,如表1所示,所選擇的影像涉及多種地表類型,包括平坦的裸地、大型水域、雪及山區等,具有不同的紋理特征,包括少云影像和多云影像,因此有很大的光照差異和場景變化。選取經典的大津法閾值算法[18]、文獻[10]的樹狀結構云檢測算法,以及人工經驗閾值提取結果和本文算法結果進行對比。如圖13所示,對于GF-1-1少云影像,大津法無法有效檢測云區域,樹狀結構算法將部分地物檢測為云區域,本文算法正確地檢測到了云區域,但是云區域不夠完整。對于具有大面積水域的影像,如GF-1-2,大津法和樹狀結構法將大量陸地區域誤檢測為云區域,而本文算法能夠準確地檢測云區域,并且和人工提取結果相似。對于具有類云地物(如雪、白色建筑物等,并且地物邊界清晰)的影像,如GF-1-3,大津法和樹狀結構法都將類云地物誤檢測為云區域,而且樹狀結構法漏檢測大量的云區域,而本文算法不僅能有效地去除類云地物,而且云檢測效果較為理想。對于多云影像,如GF-1-4,大津法和本文算法準確地檢測出云區域,而樹狀結構法將部分地物誤檢測為云區域。對于具有單波段影像,如ZY-3,樹狀結構法將部分地物誤檢測為云區域,本文算法和大津法能準確地檢測出云區域。對于具有高亮度建筑物的影像,如TH-1,大津法將高亮建筑物誤檢測為云區域,樹狀結構法檢測的云區域比實際云區域小,本文算法雖然將少部分建筑物誤檢測為云,但總體效果要優于大津法和樹狀結構法。 表1 實驗數據介紹 為了客觀地分析云檢測結果,本文選用目視判別與定量評價相結合的方式驗證云檢測結果的有效性[19],包括正確率(accuracy rate,AR)、總體正確率(overall accuracy,OA)、漏檢率(miss rate,MR)和錯誤率(false rate,FR)來定量分析檢測結果,計算如式(1)至式(4)所示。 (1) (2) (3) (4) 式中:MFN代表云區域被誤檢測為非云區域的像素數;MFP代表非云區域被誤檢測為云區域的像素數;MTP代表檢測正確的像素數。 根據上述評價指標,本文將大津算法、樹狀結構算法和本文算法檢測結果進行統計,如表2所示,發現:對于少云影像,具有特殊地形(有多面積水域、類云地物)的影像,本文算法的正確率、總體正確率都高于大津法和樹狀結構法,漏檢率也低于大津法和樹狀結構法;對于云量較多,并且無類云地物的影像,本文算法的正確率和總體正確率與大津法相差不大,高于樹狀結構法;對于具有高亮建筑物的有云影像,本文算法的正確率和總體正確率高于大津法和樹狀結構法,漏檢率和錯誤率低于大津法和樹狀結構法,具有明顯的優勢。 圖13 云檢測算法視覺對比 表2 云檢測結果精度評價表 % 上述實驗表明,本文云檢測算法適用性強,能夠適用于多種類型的高分辨率遙感影像,云檢測正確率高,誤檢率低,能夠去除多種類云地物,對于復雜地物的有云影像具有較好的云檢測結果。 本文在詳細分析了多云影像和少云影像的光譜特征以及云與類云地物邊緣梯度差異的基礎上,提出了一種多源高分辨率遙感影像云檢測算法。該算法根據影像中云區域的光譜特性并聯合大津閾值分割法和多項式擬合閾值分割法的優點對云進行初步檢測,然后利用云和類云過渡區域紋理特征差異去除類云地物,并根據光譜之間的差異特征對云區域進一步檢查,提高云檢測結果的準確性。本算法有以下優點。 1)能夠自動實現多源影像云檢測,不僅適用于具有紅、綠、藍三個波段的影像,而且適用于單波段影像,具有較強的普適性。 2)該算法不僅能夠準確地檢測多云影像,而且對于少云影像也具有理想的檢測效果。 3)該算法能夠去除邊緣清晰的類云地物。 4)算法復雜度小,耗時短,可實時對影像進行云檢測,并且有較高正確率和較低的誤檢率。 然而,本文提出的算法依然存在一定的缺陷,需要在今后的工作中繼續改進。一方面,對于較薄云層會出現漏檢;另一方面,無法去除過渡區不是很明顯的類云地物。因此,后期會詳細分析類云地物和云區域的特征差異,繼續對算法進行改進。3 實驗與分析
4 結束語
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44