某型遠(yuǎn)程火箭炮控制系統(tǒng)訓(xùn)練模擬系統(tǒng)研制
2022-04-20 11:25:34李思雨黃少羅曹立軍張建平吳巍屹
火炮發(fā)射與控制學(xué)報(bào) 2022年2期
李思雨,黃少羅,曹立軍,張建平,吳巍屹
(陸軍工程大學(xué)石家莊校區(qū),河北 石家莊 050003)
針對(duì)某型遠(yuǎn)程火箭炮武器系統(tǒng)訓(xùn)練和科研過(guò)程中實(shí)際裝備數(shù)量較少,官兵在實(shí)裝訓(xùn)練時(shí)不能全員參加,造成完全依托實(shí)裝進(jìn)行用炮、收炮、裝彈和退彈訓(xùn)練,容易導(dǎo)致實(shí)裝教學(xué)訓(xùn)練強(qiáng)度大、演示時(shí)間長(zhǎng)、裝備使用壽命縮短等問(wèn)題。當(dāng)遠(yuǎn)程火箭炮武器系統(tǒng)在訓(xùn)練過(guò)程中發(fā)生故障時(shí),會(huì)嚴(yán)重影響訓(xùn)練和科研工作的進(jìn)度。通過(guò)遠(yuǎn)火控制系統(tǒng)訓(xùn)練模擬系統(tǒng)(簡(jiǎn)稱模擬系統(tǒng))可以在脫離實(shí)裝的情況下進(jìn)行相關(guān)科目的操作訓(xùn)練,減少實(shí)裝損耗,提高訓(xùn)練效率[1]。在工作過(guò)程中與指揮車等其他裝備共同構(gòu)成一個(gè)整體,模擬系統(tǒng)除完成本機(jī)單獨(dú)的工作之外,還可以與其他模擬裝備之間進(jìn)行互聯(lián),構(gòu)建武器系統(tǒng)的綜合訓(xùn)練平臺(tái)來(lái)進(jìn)行指揮訓(xùn)練。
1 模擬系統(tǒng)研制方案
1.1 設(shè)計(jì)思路
模擬系統(tǒng)研制方案的整體思路是:采用與實(shí)裝一致的組合面板,構(gòu)建系統(tǒng)基本硬件環(huán)境,通過(guò)計(jì)算機(jī)模擬組合內(nèi)部電路功能、實(shí)現(xiàn)各組合的邏輯控制,建立一個(gè)逼真的人機(jī)交互操作界面(環(huán)境),實(shí)現(xiàn)裝備的操作訓(xùn)練、指揮訓(xùn)練和維修訓(xùn)練[2]。圖1為控制系統(tǒng)訓(xùn)練模擬系統(tǒng)發(fā)射車模擬器。
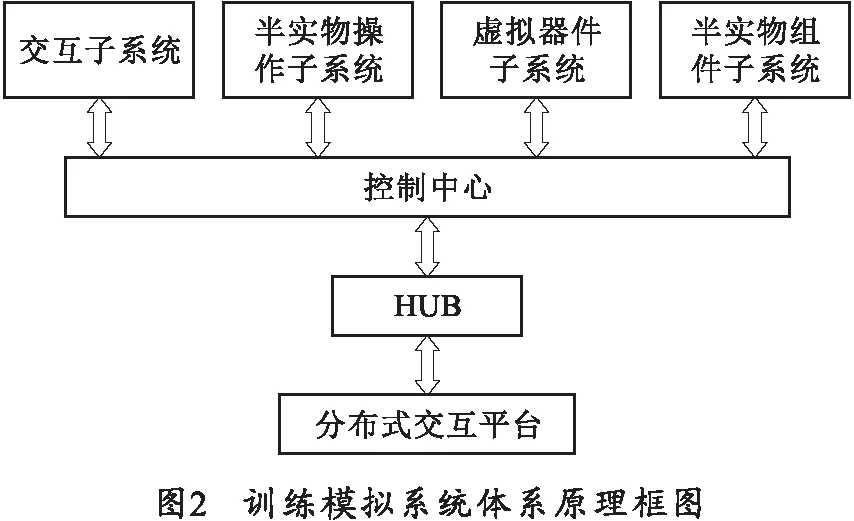
模擬系統(tǒng)由半實(shí)物操作子系統(tǒng)、虛擬器件子系統(tǒng)、半實(shí)物組件子系統(tǒng)、交互子系統(tǒng)和控制中心構(gòu)成,各子系統(tǒng)通過(guò)控制中心連接形成一個(gè)有機(jī)的整體,在控制中心的統(tǒng)一協(xié)調(diào)控制下工作,控制中心與分布式交互平臺(tái)相通,圖2是其組成原理框圖。
1.2 各子系統(tǒng)作用
1.2.1 控制中心
控制中心是整個(gè)系統(tǒng)的“大腦”。遠(yuǎn)程火箭炮武器系統(tǒng)正常工作時(shí),系統(tǒng)內(nèi)部關(guān)系多樣、故障種類多,彼此關(guān)系錯(cuò)綜復(fù)雜,所以要全方位、精準(zhǔn)地在各個(gè)模擬子系統(tǒng)上把控制系統(tǒng)正常的運(yùn)行狀態(tài)和發(fā)生故障時(shí)的現(xiàn)象真實(shí)地模擬出來(lái)。設(shè)計(jì)思路是結(jié)合子系統(tǒng)運(yùn)行時(shí)相互之間的控制、邏輯關(guān)系,把整個(gè)模擬系統(tǒng)以各個(gè)子系統(tǒng)為模塊細(xì)化為不同單元,單元之間是獨(dú)立的。控制中心作為模擬系統(tǒng)的樞紐,中央控制板輸出指令,通過(guò)網(wǎng)絡(luò)接口完成對(duì)各個(gè)子系統(tǒng)操作面板開(kāi)關(guān)量、可調(diào)控變量等的監(jiān)督,來(lái)實(shí)現(xiàn)對(duì)模擬系統(tǒng)的各子系統(tǒng)以及整個(gè)系統(tǒng)運(yùn)行狀態(tài)的控制。
1.2.2 半實(shí)物操作子系統(tǒng)
控制系統(tǒng)內(nèi)部電路連接復(fù)雜,不同的控制面板功能各異。因此人員進(jìn)行日常訓(xùn)練時(shí),需要較強(qiáng)的操作能力。裝備發(fā)生故障時(shí),會(huì)由不同原因造成,根據(jù)故障現(xiàn)象很難及時(shí)排除故障原因,在進(jìn)行維修訓(xùn)練時(shí),更需要接近實(shí)際裝備的訓(xùn)練環(huán)境。半實(shí)物操作子系統(tǒng)采用半實(shí)物仿真技術(shù)的控制面板在外觀、功能上和實(shí)際裝備幾乎一樣,創(chuàng)造出真實(shí)的操作訓(xùn)練環(huán)境。
半實(shí)物操作子系統(tǒng)結(jié)合遠(yuǎn)程火箭炮武器系統(tǒng)控制系統(tǒng)的運(yùn)行規(guī)律,由硬件和軟件兩部分構(gòu)成,硬件部分主要以實(shí)操面板為主;軟件部分主要集中在終端上,完成信息的處理。
1.2.3 虛擬器件子系統(tǒng)
虛擬器件子系統(tǒng)是基于虛擬現(xiàn)實(shí)和計(jì)算機(jī)仿真技術(shù)來(lái)實(shí)現(xiàn)遠(yuǎn)程火箭炮武器系統(tǒng)的結(jié)構(gòu)和組成、控制面板和組件之間的邏輯運(yùn)行關(guān)系,從而搭建出整個(gè)訓(xùn)練環(huán)境。結(jié)合數(shù)據(jù)記錄功能,可以存儲(chǔ)大量訓(xùn)練數(shù)據(jù),進(jìn)行訓(xùn)練效果評(píng)估。還可以實(shí)現(xiàn)故障模擬,真實(shí)再現(xiàn)故障發(fā)生現(xiàn)象,便于人員虛擬維修訓(xùn)練。
1.2.4 半實(shí)物組件子系統(tǒng)
半實(shí)物組件子系統(tǒng)的主要功能是提供控制系統(tǒng)真實(shí)的工作環(huán)境,因此系統(tǒng)的各部分由實(shí)裝組件構(gòu)成,各部分組件之間用控制模塊和功能不一的電纜連接,便于模擬系統(tǒng)正常工作輸出的不同信號(hào)。根據(jù)不同的信號(hào)可以進(jìn)行訓(xùn)練、檢測(cè)與維修。
1.2.5 交互子系統(tǒng)
交互子系統(tǒng)主要是進(jìn)行模擬系統(tǒng)與其他武器裝備在信息上的互聯(lián)互通,對(duì)鏈路上的信息進(jìn)行有目的的控制。交互子系統(tǒng)轉(zhuǎn)接口可以與兩類裝備進(jìn)行交互,一是與實(shí)際的武器裝備;二是與其他模擬系統(tǒng)。
1.3 工作方式
從全系統(tǒng)層面講,模擬系統(tǒng)的工作方式主要分為聯(lián)動(dòng)工作方式和自主工作方式[3]。
1.3.1 聯(lián)動(dòng)工作方式
在該模式的工作下,模擬系統(tǒng)一方面完成本機(jī)工作,另一方面還要完成與其他設(shè)備之間的交互,以建立聯(lián)調(diào)聯(lián)試的武器訓(xùn)練平臺(tái)。聯(lián)動(dòng)工作方式信息流如表1所示。

表1 聯(lián)動(dòng)工作方式各子系統(tǒng)輸入、輸出信息一覽表
1.3.2 自主工作方式
在自主工作方式下,可完成模擬系統(tǒng)本機(jī)單獨(dú)工作,與聯(lián)動(dòng)工作方式的區(qū)別是模擬系統(tǒng)不需要與武器系統(tǒng)綜合訓(xùn)練仿真交互平臺(tái)交互信息,控制中心控制協(xié)調(diào)半實(shí)物操作子系統(tǒng)、虛擬器件子系統(tǒng)、半實(shí)物組件子系統(tǒng)獨(dú)立工作或協(xié)同工作[4]。
2 模擬系統(tǒng)硬件系統(tǒng)實(shí)現(xiàn)
基于系統(tǒng)硬件的研究是指各子系統(tǒng)硬件設(shè)計(jì)與實(shí)現(xiàn),操作訓(xùn)練是一個(gè)典型的離散事件系統(tǒng)的仿真,整個(gè)過(guò)程是在操作產(chǎn)生的事件和遠(yuǎn)火控制系統(tǒng)內(nèi)單體設(shè)備產(chǎn)生的事件的驅(qū)動(dòng)下展開(kāi)的。仿真運(yùn)行的邏輯中,主要包括與具體的控制系統(tǒng)一致的開(kāi)關(guān)機(jī)步驟、指揮軟件操作和對(duì)操作過(guò)程的監(jiān)督、記錄3個(gè)部分。操作訓(xùn)練的全過(guò)程是激勵(lì)各模擬器單體作用下的效果,是在聯(lián)動(dòng)工作方式下進(jìn)行[5-6]。表1介紹了聯(lián)動(dòng)工作方式下,子系統(tǒng)輸入、輸出關(guān)系,因此主要對(duì)半實(shí)物操作子系統(tǒng)、半實(shí)物組件子系統(tǒng)和虛擬器件子系統(tǒng)分析研究。
2.1 半實(shí)物操作子系統(tǒng)
該部分采用“主控計(jì)算機(jī)+顯示控制計(jì)算機(jī)+故障診斷計(jì)算機(jī)”的控制模式。
根據(jù)系統(tǒng)裝備構(gòu)成特點(diǎn),半實(shí)物操作子系統(tǒng)以實(shí)際裝備為基礎(chǔ),依據(jù)工作原理,研制出的操作面板在外觀和功能上與實(shí)際裝備相同,從而達(dá)到模擬訓(xùn)練的真實(shí)性。實(shí)裝操作時(shí)主要是完成對(duì)操作面板和相關(guān)部件訓(xùn)練。硬件由兩大部分組成:
1)主控計(jì)算機(jī)系統(tǒng)。輸入操作指令,運(yùn)行計(jì)算機(jī)相關(guān)程序進(jìn)行相關(guān)操作訓(xùn)練和故障仿真,針對(duì)故障現(xiàn)象,人員完成故障診斷,從而實(shí)現(xiàn)維修訓(xùn)練。
2)顯示控制計(jì)算機(jī)。通過(guò)網(wǎng)絡(luò)協(xié)議,主控計(jì)算機(jī)生成的程序傳輸給顯示控制計(jì)算機(jī),顯示計(jì)算機(jī)呈現(xiàn)出系統(tǒng)運(yùn)行場(chǎng)景。
2.2 半實(shí)物組件子系統(tǒng)
半實(shí)物組件子系統(tǒng)的主要功能是提供裝備子系統(tǒng)真實(shí)的工作環(huán)境,因此控制系統(tǒng)的各個(gè)部件采用實(shí)裝部件,在部件之間連接及集成單元進(jìn)行連接,以保證部組件組成、功能與實(shí)裝相一致。同時(shí),為了在半實(shí)物組件子系統(tǒng)的基礎(chǔ)上進(jìn)行操作使用和測(cè)試維修等訓(xùn)練,還需要根據(jù)實(shí)際需要對(duì)半實(shí)物組件進(jìn)行改裝,完成與實(shí)裝連接。硬件由實(shí)裝模塊、控制模塊、連接及集成模塊等組成。構(gòu)成如圖3所示。
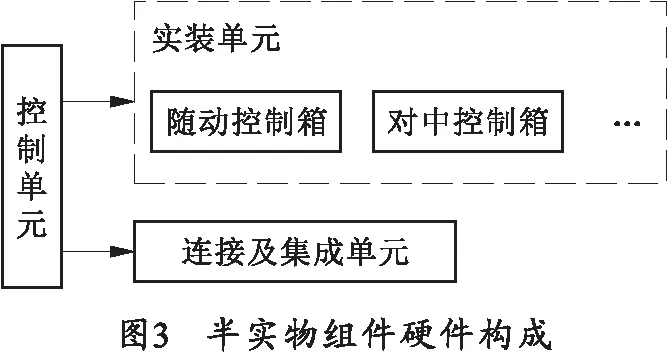
半實(shí)物組件子系統(tǒng)的硬件實(shí)現(xiàn)過(guò)程:連接及集成模塊通過(guò)機(jī)械和電氣連接,在控制模塊的控制下為實(shí)裝模塊提供正常工作所需的各種電源、激勵(lì)和控制信號(hào),實(shí)現(xiàn)車載設(shè)備的正常功能。將設(shè)備的各實(shí)裝部件連接起來(lái)使設(shè)備正常工作;開(kāi)關(guān)可以控制鏈路部分產(chǎn)生的信號(hào),便于觀察和隔離故障;通過(guò)指示燈指示測(cè)試位置,以供觀察;通過(guò)按鍵控制大屏幕液晶顯示器呈現(xiàn)測(cè)試位置。將以上3部分通過(guò)機(jī)架有機(jī)地組合在一起,構(gòu)成一個(gè)方便實(shí)用的操作環(huán)境。
2.3 虛擬器件子系統(tǒng)
虛擬器件子系統(tǒng)的實(shí)現(xiàn)基礎(chǔ)是各種虛擬裝備,主要由虛擬測(cè)試儀器、真實(shí)測(cè)試儀器、專用信號(hào)發(fā)生器3個(gè)部分構(gòu)成。在該子系統(tǒng)下,參訓(xùn)人員可以完成裝備虛擬訓(xùn)練、故障診斷后的虛擬測(cè)試、虛擬維修訓(xùn)練等。基于上述的訓(xùn)練需要虛擬器件子系統(tǒng)、控制中心、交互子系統(tǒng)進(jìn)行信息交互。虛擬器件子系統(tǒng)可以與半實(shí)物操作子系統(tǒng)進(jìn)行交互,也能夠與實(shí)裝操作子系統(tǒng)協(xié)同運(yùn)行進(jìn)行訓(xùn)練,從而實(shí)現(xiàn)訓(xùn)練同步感知。虛擬器件子系統(tǒng)也可以單獨(dú)進(jìn)行虛擬維修訓(xùn)練。
3 模擬系統(tǒng)軟件系統(tǒng)實(shí)現(xiàn)
模擬系統(tǒng)設(shè)計(jì)時(shí)采用樹(shù)狀形的軟件體系結(jié)構(gòu),編程方法是面向?qū)ο缶幊?Object Oriented Programming,簡(jiǎn)稱OOP),軟件系統(tǒng)實(shí)現(xiàn)如下:
1)計(jì)算機(jī)
操作系統(tǒng):Windows XP、Windows 2000;
內(nèi)存:3 GB;
顯卡:GF系列顯卡。
2)工具軟件
分布仿真支撐軟件:pRTI 1516/KD-RTI;
三維建模軟件:Softimage/XSI、Lightwave 3D、Cinema 4D、PRO-E;
虛擬仿真軟件:baiSimuWorks、PLC仿真軟件;
建模工具:Trufun Plato;
編程環(huán)境:Visual Studio 2003/2005/2008,Eclipse;
系統(tǒng)數(shù)據(jù)庫(kù):MySQL/MariaDB。
3.1 子系統(tǒng)軟件設(shè)計(jì)與實(shí)現(xiàn)
3.1.1 半實(shí)物操作子系統(tǒng)
軟件層從功能上可分為應(yīng)用層、模擬層、網(wǎng)絡(luò)與通信層、硬件控制層和系統(tǒng)層。
半實(shí)物操作子系統(tǒng)能對(duì)武器系統(tǒng)的正常工作現(xiàn)象及常見(jiàn)的故障現(xiàn)象進(jìn)行模擬,在綜合考慮編程語(yǔ)言、用戶需要和工程實(shí)踐的基礎(chǔ)上設(shè)計(jì)[7]。
系統(tǒng)的最上層為應(yīng)用層,負(fù)責(zé)整個(gè)系統(tǒng)的管理及控制,并完成必要的人機(jī)交互及界面管理;其次是數(shù)據(jù)層,負(fù)責(zé)信息采集以及輸出和通信控制;第三層為邏輯層,負(fù)責(zé)各組合的正常邏輯控制以及故障現(xiàn)象的邏輯控制。
3.1.2 交互子系統(tǒng)
模擬系統(tǒng)除完成專業(yè)訓(xùn)練外,還需與其他裝備進(jìn)行交互訓(xùn)練。模擬系統(tǒng)在設(shè)計(jì)時(shí)須在兩個(gè)層面考慮集成問(wèn)題。一是根據(jù)武器系統(tǒng)的信息流,考慮模擬器的輸入、輸出信息,既能夠接收其他模擬器輸入的信息,又能夠輸出信息到其他模擬器;二是設(shè)置數(shù)據(jù)接口,實(shí)現(xiàn)模擬系統(tǒng)間基于鏈路的分布互聯(lián)。
體系結(jié)構(gòu)圖如圖4所示。

3.1.3 虛擬器件子系統(tǒng)
從軟件設(shè)計(jì)來(lái)看,虛擬器件子系統(tǒng)的虛擬操作訓(xùn)練、虛擬維修訓(xùn)練以及聯(lián)合維修訓(xùn)練軟件框架有形似性,各組件間都采用一致的基于消息的交互。虛擬操作訓(xùn)練、虛擬維修訓(xùn)練以及聯(lián)合維修訓(xùn)練的軟件部分采用了相同的設(shè)計(jì)模式,以消息管理組件為核心的“組件-框架”交互模式和基于消息的組件互操作模式[8]。提取3種訓(xùn)練框架中的共性組件構(gòu)成虛擬器件子系統(tǒng)的支撐框架,3個(gè)訓(xùn)練任務(wù)的運(yùn)行可視為在統(tǒng)一框架下的軟件實(shí)例。虛擬子系統(tǒng)相關(guān)數(shù)據(jù)流如圖5所示。

3.2 核心技術(shù)
研究訓(xùn)練模擬系統(tǒng)的實(shí)現(xiàn)過(guò)程,其核心技術(shù)如下:
1)仿真裝備與實(shí)裝的狀態(tài)映射方法設(shè)計(jì)。狀態(tài)映射是仿真裝備結(jié)構(gòu)的重要功能:一是仿真裝備結(jié)構(gòu)可以完全反映裝備的工作狀態(tài)或故障現(xiàn)象;二是在仿真裝備上進(jìn)行的狀態(tài)切換、工作模式控制、故障設(shè)置、信號(hào)注入均可以在實(shí)裝上得以表現(xiàn)[9]。仿真裝備與實(shí)裝的狀態(tài)映射方法主要通過(guò)節(jié)點(diǎn)監(jiān)測(cè)、分布式控制等手段實(shí)現(xiàn),采用了與實(shí)物結(jié)構(gòu)、尺寸完全相同的仿真技術(shù)制作,即可進(jìn)行整體系統(tǒng)的操作演示,又可進(jìn)行各部件的拆裝、調(diào)試,完全可以替代對(duì)該系統(tǒng)的實(shí)裝訓(xùn)練。
2)故障模式及故障機(jī)理建模。故障模擬是訓(xùn)練模擬系統(tǒng)對(duì)于虛擬維修實(shí)現(xiàn)的難點(diǎn)。故障模擬有兩個(gè)前提:一是對(duì)裝備的故障模式進(jìn)行分析;二是建立裝備發(fā)生故障時(shí)的機(jī)理模型。通過(guò)對(duì)原理研究以及實(shí)裝實(shí)驗(yàn)實(shí)現(xiàn)的故障機(jī)理建模[10]。從單體設(shè)備的功能、組成著手,運(yùn)用RCM和FMEA等理論對(duì)單體設(shè)備及其軟件模塊可能出現(xiàn)的故障進(jìn)行分析,確定各單體裝備的故障模式、現(xiàn)象以及輸出的故障信號(hào)形式;然后,研究單體設(shè)備之間的連接關(guān)系和工作原理,分析傳輸信號(hào)的種類、數(shù)據(jù)組成、收發(fā)時(shí)序等參數(shù)。
3)實(shí)裝產(chǎn)生信號(hào)與訓(xùn)練狀態(tài)同步生成模式。產(chǎn)生故障時(shí),明確單體設(shè)備之間影響特點(diǎn),構(gòu)建故障機(jī)理模型,從而實(shí)現(xiàn)故障模擬[11]。借助深度學(xué)習(xí)的診斷技術(shù),對(duì)于不同信號(hào)形式的模擬,構(gòu)建信號(hào)發(fā)生設(shè)備,內(nèi)部嵌入多種專用信號(hào)發(fā)生模塊,能夠產(chǎn)生與實(shí)裝相匹配的信號(hào)形式。在實(shí)際裝備上進(jìn)行故障試驗(yàn),著重采錄單體操作面板的故障現(xiàn)象、采集單體設(shè)備輸入、輸出端口的信號(hào)特征等,對(duì)故障機(jī)理模型進(jìn)行修正和完善。設(shè)備正常運(yùn)行時(shí),輸出正常信號(hào);設(shè)備處于故障狀態(tài)時(shí),將此端口信號(hào)中斷,沒(méi)有輸出。
4 結(jié)束語(yǔ)
遠(yuǎn)火控制系統(tǒng)訓(xùn)練模擬系統(tǒng)采用了一體化綜合模擬設(shè)計(jì)方法,借助半實(shí)物仿真技術(shù),能夠替代實(shí)裝的結(jié)構(gòu)、動(dòng)作教學(xué),也可以完成對(duì)結(jié)構(gòu)分解結(jié)合、故障設(shè)置與排除等維修訓(xùn)練。達(dá)到了結(jié)構(gòu)、動(dòng)作與實(shí)物的仿真效果;同時(shí)使系統(tǒng)中抽象的原理更加直觀化。該模擬系統(tǒng)具有功能全面、仿真效果好、可視化程度高等特點(diǎn),可用于部隊(duì)、院校及訓(xùn)練機(jī)構(gòu)的平時(shí)教學(xué)訓(xùn)練,有著明顯的軍事和經(jīng)濟(jì)效益。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
