無人機短距著陸縱向控制策略設計
2022-04-19 01:18:40段鵬鄭金豪呂健瑋
機械制造與自動化 2022年2期
關鍵詞:控制策略
段鵬,鄭金豪,呂健瑋
(南京航空航天大學 自動化學院,江蘇 南京 211100)
0 引言
無人機是一種無人駕駛、可重復使用的航空器。飛行器通過飛行控制系統或依靠遙控指令進行自主飛行。隨著無人機控制技術的成熟、無人機運營成本降低與實際需求的增加,無人機在科學研究、軍事、民用等領域不斷發光發熱,無人機成為人們眼中未來前沿科技的代名詞之一。在緊張的國際形勢、緊密的戰略部署以及各方投資資本作用下,無人機的發展正在駛入高速發展的快車道。
可重復使用的中大型無人機以輪式起降的固定翼無人機為主,該類無人機在無人機民用方面、軍事用途、科學研究中占據巨大的比例。該類無人機的技術推進是無人機發展的重要體現之一。
目前軍用機場建設位置較為固定,暫時能滿足各類飛行器的起降要求。隨著世界格局的快速變化,以輪式起降無人機為主的軍用無人機開始進行大批量部署。但隨著需求增加與具體應用和軍事戰略部署將引發一系列實際應用問題,如規劃部署中的機場跑道場地選址難的問題等。民用無人機在軍民融合政策的引領下發展勢頭逐漸壯大,各類通航飛機的無人機改造計劃正在如火如荼地進行。諸多具備優良無人機特性潛力的機型正在改造進行中。各類資本企業為占領無人機未來市場,推動無人機的工業化進程也必須解決這一實際應用問題。而無人機滑跑距離過長是該問題的根本原因,故需要縮短無人機的滑跑距離。
目前,輪式起降固定翼無人機在中大型無人機整體數量以及用途需求上占大多數。但由于機場建設較為固定且跑道選址較為特殊,隨著世界格局的影響以及無人機工業化進程的推進,迫切地需要短距起降。以推力矢量發動機進行的自主短距起降技術實際運用性較低,而現有的無人機氣動設計不足以支撐無人機著陸短距要求。故本文設計了一種基于襟翼直接力控制下的著陸控制策略,以取得低速著陸短距效果的同時保證較好的魯棒性。
本文以中大型常規氣動布局固定翼無人機為研究對象,首先分析了其在無襟翼構型下著陸無法取得良好短距性能的問題;然后設計在連續襟翼下的著陸短距控制策略;最后經仿真對比證明控制策略下能提升無人機的著陸精度以及短距性能。
1 問題描述與機理分析
1.1 自主著陸短距要求
無人機著陸飛行過程大致有以下五個階段:進場平飛段、軌跡捕獲段、陡下滑段、淺下滑段和地面滑跑段(圖1、表1)。各個階段均肩負著獨特的任務:進場平飛段時,切換著陸狀態下的氣動構型、以定高平飛的形式調整無人機飛行狀態;軌跡捕獲段時,捕捉無人機著陸軌跡,引導無人機切換著陸下滑模態;陡下滑段時,無人機在下滑過程沿著預設的著陸下滑軌跡線下滑,接近預設著陸點;淺下滑段時,無人機在沿著軌跡線逐漸拉起姿態調整飛行狀態,直至安全接地;地面滑行段時,依靠阻力在地面上減速滑跑,直至停止著陸過程結束[1]。該階段決定了無人機自主飛行成敗。由于無人機間具有不同的特性,此外根據不同的應用場景需要指定不同的著陸要求指標,往往無人機著陸控制策略具有豐富的多樣性。
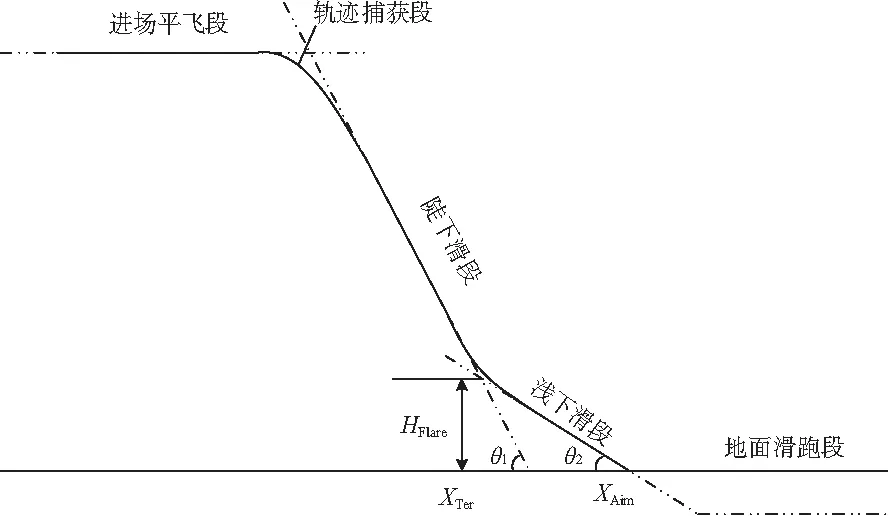
圖1 無人機著陸過程示意圖
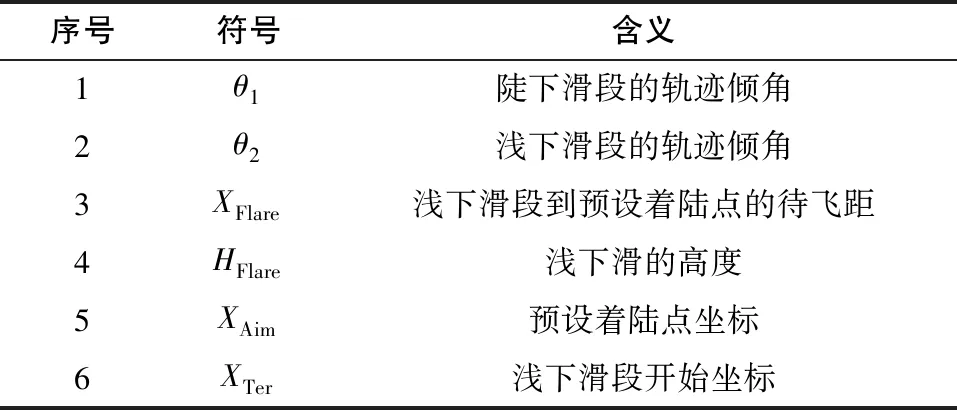
表1 著陸軌跡線參數列表
常規固定翼無人機的著陸短距要求主要有兩點:1)較低的著陸速度。常規固定翼無人機在淺下滑一般下沉率從-2m/s左右變化到-0.5m/s觸地且高度一般在10~20m,故淺下滑飛行時間大致可知。著陸距離與速度直接相關,減小著陸飛行速度對于短距而言極為重要。2)較高的著陸精度。無人機須在800m跑道上接地,且不能沖出跑道。由于無人機著陸的短距需求,需要無人機以較低的飛行速度接地,僅憑升降舵進行縱向軌跡控制會有發散的跡象,低速情況下不確定性干擾對空速的影響較大,從而會影響到無人機的著陸控制效果,故在觸地速度達到要求的同時需要保證無人機著陸的精度問題[2]。
1.2 問題描述與機理分析
a)傳統著陸縱向控制策略
傳統無人機控制結構如圖2所示,無人機在陡下滑段采用PI結構通過油門進行速度控制以保證速度精準閉環;升降舵以典型的阻尼內回路作為控制內回路,以PI結構的高度控制作為控制外回路,以實現無靜差的高度控制。而在淺下滑段使用動態飛行法,使無人機在下滑的過程中逐步拉起姿態,利用無人機自身的阻力特性進行減速,進而以合適的俯仰角、飛行速度、下沉率接地,具體關鍵控制指令如表2所示。控制結構中去除圖2中的虛線部分,升降舵僅保留角回路以及高度的比例控制項,發動機處于維持開車狀態下的最小油門。
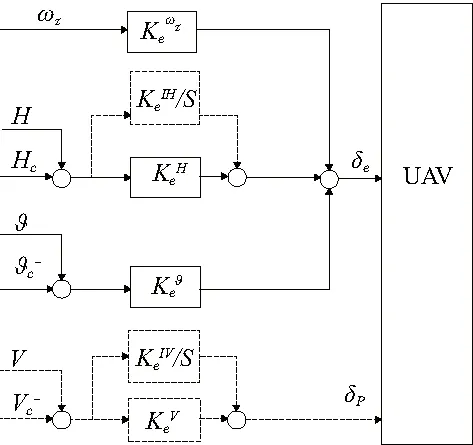
圖2 傳統著陸縱向控制策略結構

表2 關鍵控制指令
b)傳統控制策略下的著陸仿真結果
傳統無人機淺下滑段在10~20m,對象無人機在15m淺下滑高度下著陸的指標如圖3所示。無人機的觸地速度為40m/s,而15m高度的飛行距離在900m以上,再加上滑跑距離無人機的整體著陸距離應>1 200m。對象無人機雖然能夠進行正常著陸但是其不具備短距著陸能力,故需要進行減速處理以縮短無人機的著陸距離以及滑跑距離。
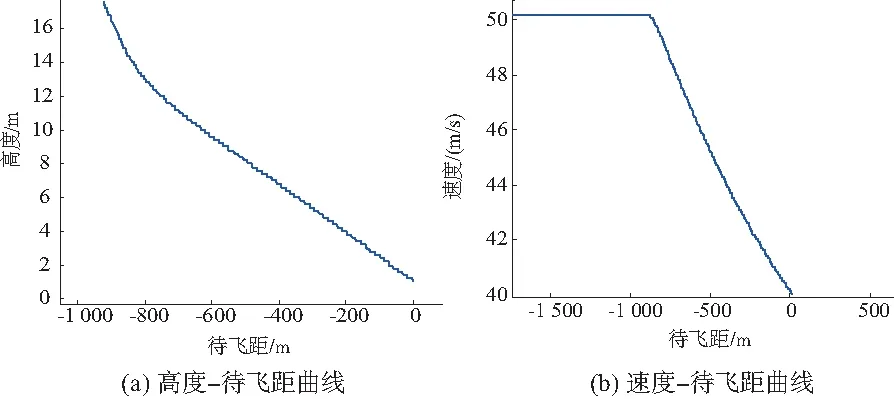
圖3 15 m淺下滑無人機觸地指標
仿真結果說明常規控制策略下無人機的減速能力弱,無法取得良好的短距著陸效果。故應提高無人機的淺下滑高度,用于無人機的淺下滑減速。當無人機淺下滑高度提升至35m時,無人機能夠達到無人機的短距著陸要求。但此時對無人機進行不確定性參數測試后(表3),陣風會導致無人機的觸地偏差較大,會間接地威脅無人機的著陸安全。仿真結果說明常規控制策略下無人機的減速能力弱,無法取得良好的短距著陸效果。

表3 不確定性測試飛行數據表
c)傳統控制策略的缺陷
1)陡下滑段速度大
無人機著陸時淺下滑段的初速度大,即陡下滑段的速度較大。在同質量及氣動構型下以相同飛行迎角進行飛行時,無人機下滑速度越小,所需縱向平衡狀態下的下滑軌跡傾角越小。為了使無人機在陡下滑段具備良好的速度控制能力,無人機的陡下滑階段需要具備一定的油門開度。對象無人機以較小的速度進行陡下滑段飛行,會使得其下滑油門較小(表4),而對象無人機在小油門下的油門線性度較差且沒有速度控制的余度,無法進行良好的速度控制。為了保證無人機的著陸安全以及著陸精度,對象無人機在無襟翼氣動構型之下,無法大幅度降低陡下滑段飛行速度進行下滑,這使得對象無人機在進入淺下滑段時的初速度較大[3]。

表4 相同軌跡傾角下滑配平數據表
2)淺下滑段減速能力弱
無人機減速能力有兩方面:一方面是減速時的加速度,另一方面是減速的距離。無人機在淺下滑段過程中油門開度不變即推力不變,重力分量近乎不變,此時無人機減速與阻力直接相關。由于對象無人機在小迎角下阻力系數偏小,故無人機需要進一步增大姿態。改變縱向受力增大迎角減小推力分量、增大重力分量,提高無人機的減速能力。對象無人機在無襟翼氣動構型下的氣動特性存在一定的特殊性,即升阻比曲線的起點較大外,隨迎角增加升阻比曲線的增長曲線十分陡峭(圖4)。
升阻比起點大且升阻比曲線陡的特殊表現為:在相同迎角下,隨著迎角的增大,升力的增加遠超過阻力的增加。若無人機在拉起減速的過程中較為迅速,當動壓一定時,會引起無人機升力的急劇增加,而同時無人機阻力增大的幅度不大,導致無人機在淺下滑過程中快速拉起姿態十分容易拉飄。如圖5所示,無人機在淺下滑減速過程中為了避免拉飄必須經歷一定時間的姿態軟化才能建立減速迎角,這又增加了無人機的飛行距離。而直接提高淺下滑高度后在不確定性影響下會威脅著陸安全(圖6)。
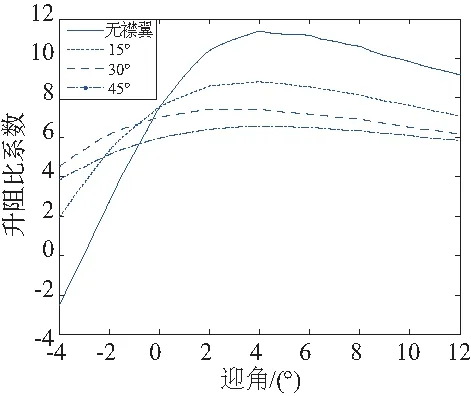
圖4 升阻比曲線
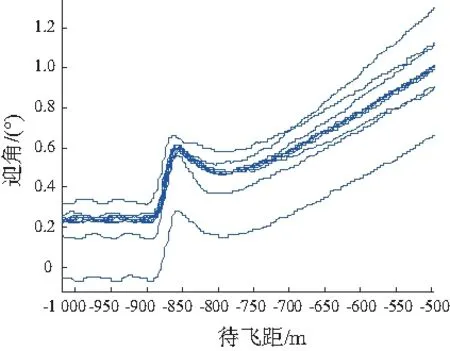
圖5 淺下滑初期迎角變化
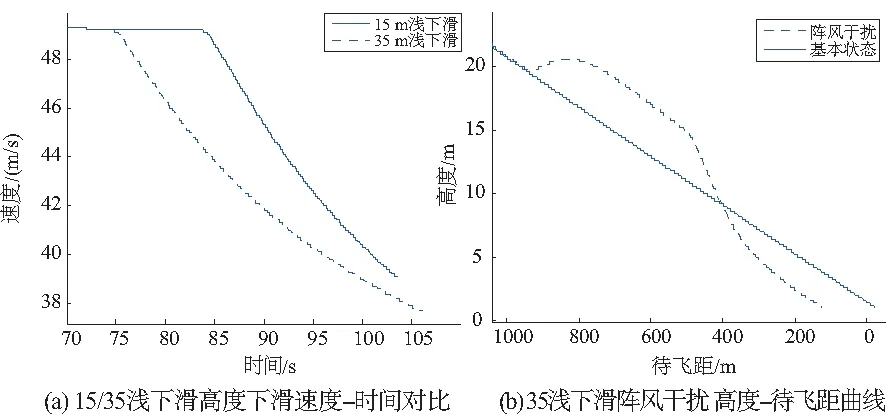
圖6 35 m淺下滑著陸曲線
綜上所述,對象無人機在無襟翼構型下,一方面淺下滑段減速過程中初速度大,另一方面減速效果極弱且相對比正常淺下滑高度數倍距離也不能獲得良好的減速效果以及較好的抗風能力,故對象無人機在無襟翼構型下無法取得短距效果。
2 連續襟翼控制策略
2.1 控制方案機理
襟翼具備增升以及增阻效應可用于短距起降[4]。由圖7可以看到,15°襟翼構型升力提升了將近50%,而在升力“頂點”所在的30°襟翼構型處升力提升了近1倍。在15°襟翼阻氣動構型力系數就已經提升了1倍,在30°襟翼構型下提升了1.5倍。無人機有襟翼構型與無襟翼構型相比,一方面在相同的飛行迎角下無人機升力系數大幅度增加,在保持升力不變的情況下,通過無人機的切向與法向受力方程(式(1))可知,襟翼構型下升力系數CL增大近1倍且阻力系數CD增大1倍以上,故可大幅度減小無人機的下滑速度[5]。
(1)
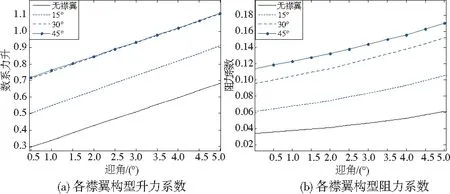
圖7 對象無人機升力/阻力特性曲線
另一方面無人機需要低速著陸以取得著陸的短距效果。然而在低速條件下僅憑升降舵無法抵御較大的陣風影響[6](圖8),究其原因是陣風影響帶來的空速影響。這會導致升力缺失使無人機掉高,升降舵舵效降低,威脅無人機的著陸安全以及觸地精度。
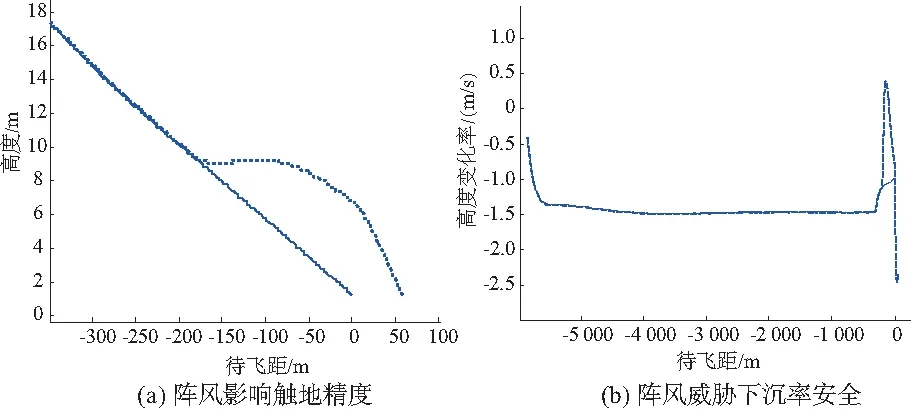
圖8 陣風著陸性能影響
選擇連續襟翼控制策略的基準面后,使襟翼在連續作動的過程中不僅能增加升力還能減小升力。根據圖7在同一迎角下隨襟翼構型的升力系數變化,該襟翼控制的基準面需要具備一定的升力以及可控的升力系數范圍。15°襟翼為各襟翼構型升力曲線的中心線,可有效地利用直接升力進行軌跡控制。
2.2 控制策略設計
首先選擇了居于升力中心線的15°襟翼構型,利用襟翼增升、增阻的特性改善升阻特性,大幅縮短陡下滑段速度,然后在淺下滑段采用連續襟翼以直接升力的方法抵抗無人機的陣風影響,增強軌跡控制能力。
因為陣風主要影響不具備速度控制的淺下滑段,故主要對無人機的淺下滑段控制策略進行改進。陣風首先影響的是無人機的空速,進而改變無人機的升力和影響無人機的軌跡。陣風干擾后無人機升力增加,飛行軌跡發生上凸時,下沉率變化較為明顯,可通過軌跡設計方法設計下沉率指令,故可選擇下沉率偏差作為襟翼控制的輸入量[7]。因下沉率是軌跡變化中相對于高度狀態量相位更為超前的狀態量,所以控制高度變化率更有利于進行軌跡的控制。本文采用PI控制結構增強對下沉率控制的精度[8]。
升降舵需要設計與預設著陸點,確定軌跡制導方案,與襟翼形成協同的控制方案,故為了簡化控制律選用原控制策略,即高度制導方案,同時為了抵御襟翼作動帶來的抬頭力矩干擾加入襟翼補償量[8],最終形成了以抵御陣風作用下襟翼下沉率的PI控制結構(圖9)。升降舵以高度控制為外回路,俯仰角回路為內回路的控制結構。
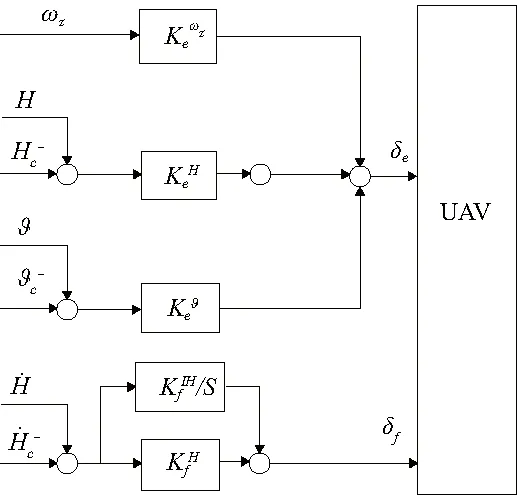
圖9 連續襟翼控制策略結構圖
淺下滑段控制律如下:
(2)
(3)
2.3 可行性分析

圖10(c)、圖10(d)中虛線代表連續襟翼控制策略,而實線代表原淺下滑控制策略。通過曲線可知無人機在陣風下襟翼能夠良好地控制下沉率變化,且在風干擾下連續襟翼可以降低速度的變化,且通過俯仰角指令進行拉起姿態時無人機速度的損耗較小,有助于升降舵的高度控制。
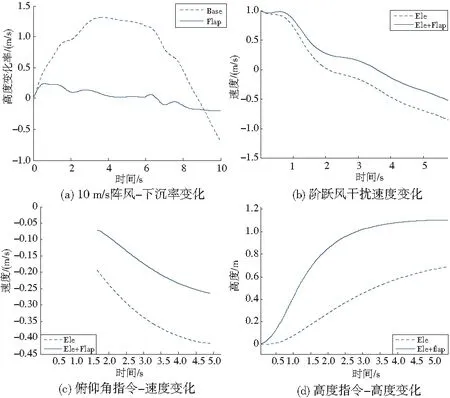
圖10 可行性分析相關曲線
3 仿真對比與分析
10m/s陣風下對比傳統控制策略與連續襟翼控制策略下的著陸仿真結果及分析,如圖11、表5所示。
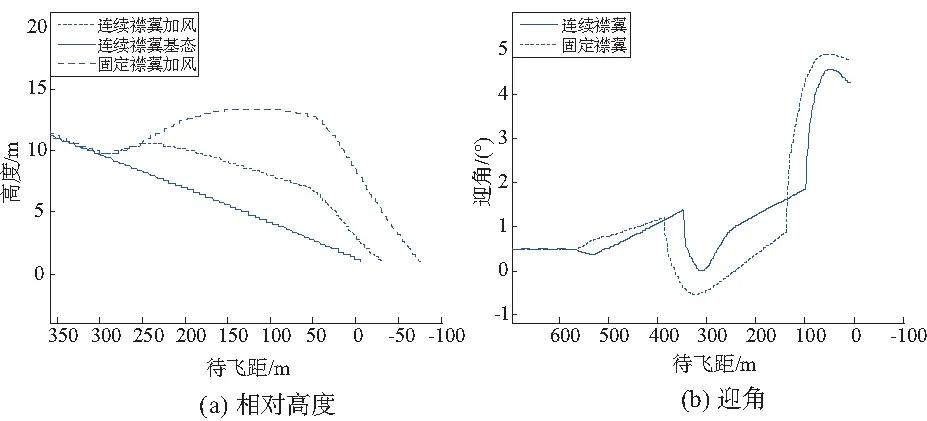
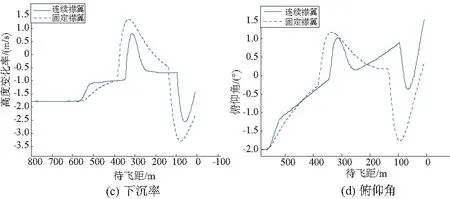
圖11 加入陣風時仿真結果對比
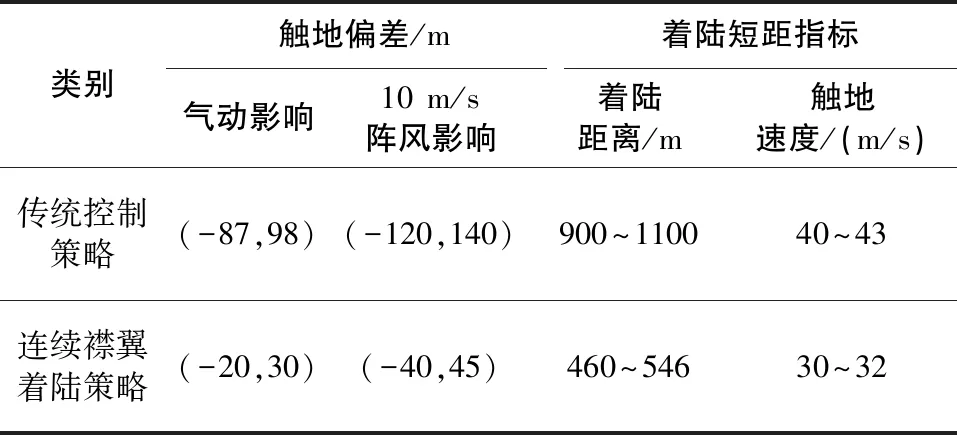
表5 仿真結果分析表
4 結語
本文以一種常規固定翼無人機為研究對象,采用傳統控制策略對無人機自主著陸的短距問題進行了詳細分析。通過選擇合適的連續襟翼控制策略的基準構型提高了無人機減速能力,并設計了連續襟翼控制策略以直接升力控制,提高了無人機在低速下的抗風能力以及軌跡控制能力,形成了以抵御陣風作用下襟翼下沉率的PI控制結構;升降舵以高度控制為外回路,俯仰角回路為內回路的控制結構。
通過仿真試驗證明本文設計的控制策略的有效性,提高了無人機風干擾下的著陸精度以及短距性能。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
