基于醫工融合的高端醫療裝備研究進展
2022-04-19 01:18:24姚佳烽鄧琪劉凱
機械制造與自動化 2022年2期
姚佳烽,鄧琪,劉凱
(南京航空航天大學 機電學院,江蘇 南京210016)
0 引言
隨著人類社會的不斷進步,人們對健康的需求日益提高,從而驅動醫療技術向前發展。醫療技術的研究是一個全球性的復雜問題,涉及到多個學科領域的知識,僅靠傳統單一學科的醫學研究難以取得較大的突破。因此,基于學科交叉[1-2]的醫工融合技術的價值不斷凸顯,已經成為現代醫學發展的新方向。
醫工融合是指基于醫學和工程學科之間的交叉融合、優勢互補、相互滲透、協同創新來解決醫學健康領域的相關問題。醫工融合技術在20世紀已經得到國內外學者的關注。世界上例如哈佛大學、斯坦佛大學等一些頂級名校早在20世紀70年代就開展醫工結合學科的研究,并成立了相關的研究所和研究中心[3]。國內對醫工結合的研究興起于20世紀80年代末期,許多重點學校例如清華大學、北京大學、上海交通大學、東南大學、哈爾濱工業大學、西安交通大學、同濟大學、北京航空航天大學、天津大學等紛紛建立了基于醫工融合的交叉學科研究所[4],為醫工融合的發展提供了一個廣闊的平臺。
目前,隨著醫學與計算機、機械、電氣等學科的深度融合,高端醫療裝備被不斷地研究和開發,為醫學臨床的診斷技術、治療技術和康復技術提供了新設備、新方法,對醫學的發展具有重要的意義。本文對一些基于醫工融合的高端醫療裝備進行論述,主要介紹了醫學電阻抗設備、醫療手術機器人以及醫療康復機器人的研究現狀和研究趨勢。
1 醫學電阻抗設備的研究現狀
電阻抗是一個公認的物理概念,在這個概念中,可以通過測量物體電學特性以評估其組成成分。由于電阻抗技術具有簡單、無創、快速、便攜、可重復等優點[5],在過去30年的時間里,逐漸被應用到醫學領域當中[6],基于電阻抗技術的先進醫療設備被不斷地開發出來。
1.1 基于電阻抗斷層成像技術的醫療設備研究現狀
電阻抗斷層成像(EIT)技術[7-9]是一種非侵入性成像技術[10],在醫學成像領域有著廣泛的研究前景[11]。電阻抗斷層成像的原理是借助一組電極按照特定的驅動測量模式重建測量場中的電導率分布或電導率變化[7],根據這一原理,可以利用EIT技術研究人體內電導率的變化,進而根據人體內電導率的變化推斷出人體的生理狀態[12]。由于電阻抗斷層成像技術具有無創、無危害、結構簡單、成本低等優點[11],在醫學成像領域受到了很多研究學者的關注。
2019年,姚佳烽等[13]開發了開發一套μEIT系統,用來對微流道中細胞溶液的細胞位置分布進行成像,如圖1所示。該裝置的開發實現了細胞在流動過程中的可視化監測,為腫瘤細胞分離效果的檢測提供了新的方法和思路。
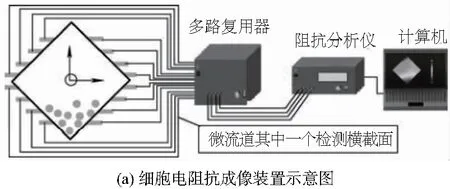
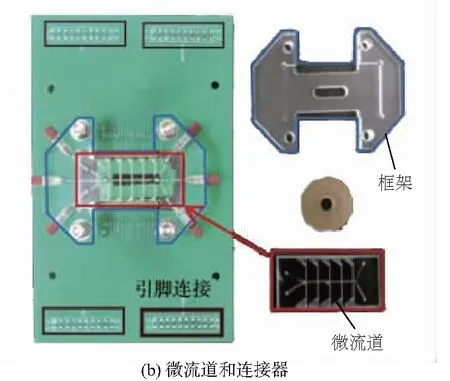
圖1 裝置示意圖和微流控芯片
2021年,RANDAZZO A等[14]提出了一種用于腦卒中監測的EIT成像設備,所提出的設備能夠有效地檢測頭部模型內不同尺寸和位置的夾雜物。該設備的研發有望實現中風類型的早期檢測,有利于腦卒中的正確治療。
2021年,姚佳烽等自主研發了用于肺檢測的床旁無輻射實時電阻抗成像設備,如圖2所示。該設備包含嵌入式硬件系統、人工智能成像算法的軟件系統、觸屏人機交互界面HMI和基于大數據云服務的長期健康管家系統。該設備相較于臨床上常用的X線胸片、CT等檢查具有無輻射、便攜性高和功能性成像等優點,可以輔助醫生實時掌握患者的肺部通氣狀況,對于個性化調整呼吸康復方案,具有重要的臨床意義。
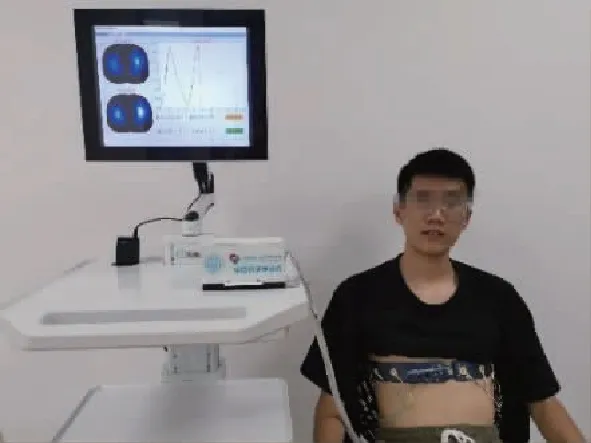
圖2 用于肺檢測的電阻抗成像設備
EIT成像技術憑借其無創、無輻射等優勢,在醫學成像領域已經得到很多學者的研究認可,基于EIT成像技術的先進醫療設備不斷開發和應用,彌補了現有的醫學成像設備有輻射、不便攜等缺陷,是醫學影像技術一個重要發展。
1.2 基于生物電阻抗譜技術的醫療設備的研究現狀
生物電阻抗譜(BIS)[15-16]技術是一種利用不同頻率下生物組織的電阻抗特性來推測相應的生理信息的技術[17]。由于生物電阻抗譜(BIS)系統干擾小、過程信息全面、結果可靠等優點在醫療檢測領域得到了廣泛的應用[18]。近年來,許多基于BIS技術的生物醫學檢測設備不斷地被開發出來。
2021年,姚佳烽等[19]研發了用于舌體腫瘤組織識別的BIS設備,設備的結構如圖3所示。該設備用生物阻抗譜的方法對其正常組織區域、混有腫瘤組織區域及腫瘤組織區域進行了電學特性研究,成功地識別出腫瘤組織所在的區域,為主刀醫生徹底切除舌體腫瘤提供了一種新的檢測方法。
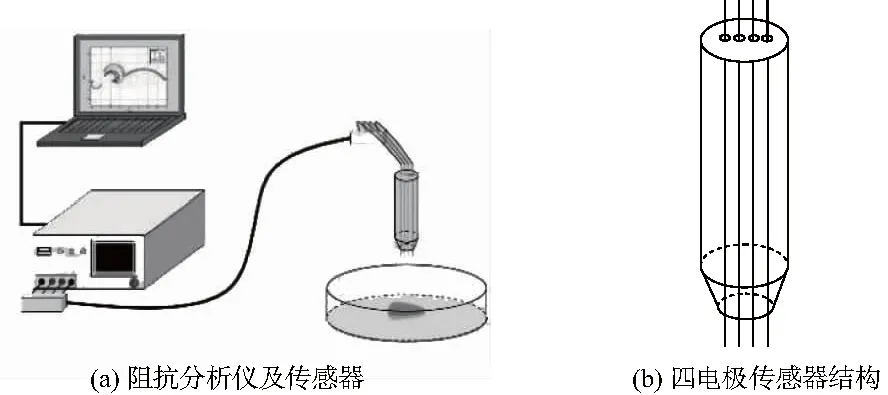
圖3 BIS 檢測儀器
2021年,LI J P等[20]設計了用于紅細胞沉降檢測的EIS裝置,如圖4所示。該裝置克服了傳統的紅細胞沉降檢測耗時長的缺點,可用于實時快速地檢測紅細胞的沉降。這項研究為血液沉降檢測提供了一種新的設備,有利于臨床上多種疾病的檢測與診斷[21-23]。
生物電阻抗譜技術以其快速、非侵入、便攜性好等優點在醫學檢測領域得到廣泛的研究,基于生物電阻抗譜技術的醫療設備的研發和應用,是醫學檢測設備的一大進步。
2 醫療機器人研究現狀
醫療機器人是醫工融合的典型設備,其研究領域涉及到醫學、生物學、計算機技術、網絡通信技術和機械等多個學科。醫療機器人的研究和應用對醫療技術的發展具有重要意義。醫療手術機器人和醫療康復機器人是醫療機器人中兩種常見的類型。
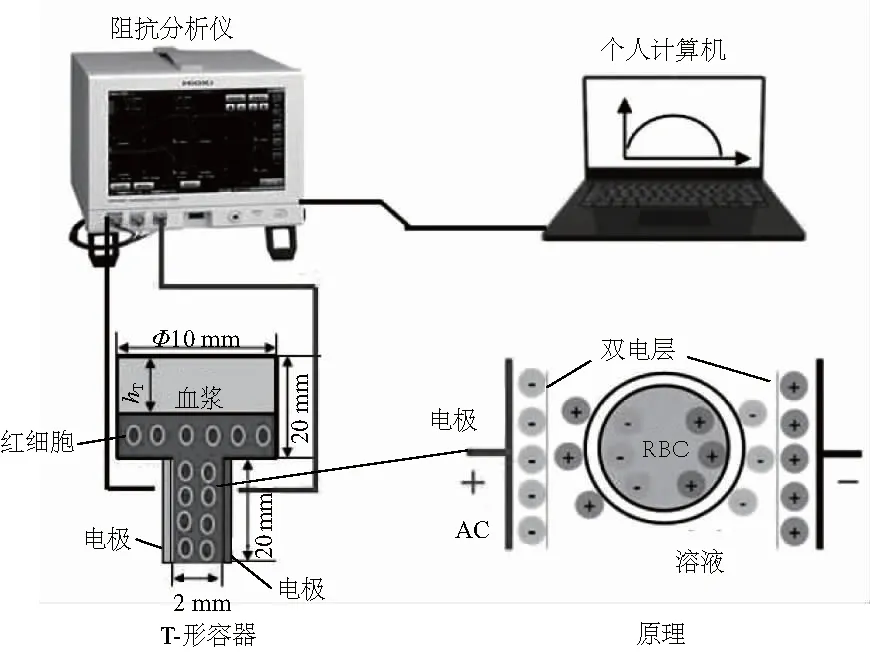
圖4 紅細胞沉降檢測設備結構圖
2.1 醫療手術機器人
與傳統的手動手術相比,用機器人輔助外科手術具有很多的優勢。第一,在機器人輔助的手術中,可以避免因外科醫生的手部震顫而影響手術效果[24];第二,由于手持手術器械的靈活度有限,難以精確地控制器械靈巧地操作,從而會增加患者的疼痛、出血和手術切口的大小,而手術機器人可以有效地克服這個缺點[25]。此外,在一些高精度的手術過程中,使用傳統的手動手術容易出現手術的失誤,而利用手術機器人就不會出現這種情況。正因為手術機器人的諸多優勢,一直受到很多學者的關注。
近年來,微創手術(MIS),由于具有恢復時間短、疤痕小等潛在優勢在實踐中被廣泛用于執行不同的醫療程序[26]。但是,由于微創手術的切口小,工作區域受限[27],很難利用傳統手術來實現。為了解決這些問題,一些用于微創手術的機器人被研發和應用[28]。但是由于現有的微創外科手術(MIS)機器人體積大、結構復雜、價格昂貴,大大增加了手術成本,限制了MIS機器人技術的應用。因此,小型化和便攜化逐漸成為MIS機器人研究的一個重要方向。2020年,ZHANG H F等[25]設計了一款新型MIS機器人,該微創手術機器人將傳統微創技術的高效性與機器人操作的靈巧性相結合,解決了現有主從式MIS機器人體積大、質量重的問題以及現有手持機器人直觀可操作性差的問題。
隨著計算機技術和網絡通信技術的發展,遠程手術機器人逐漸發展起來。遠程手術機器人的應用可以有效解決醫療資源分布不均勻的問題。此外,在例如地震、戰場或射線等手術環境中,使用遠程手術機器人協助對患者進行治療,可以防止醫生受到傷害[29]。近年來,相關研究人員對遠程手術機器人進行了廣泛的研究。2019年6月,世界首例基于5G網絡的“一對多”遠程骨科機器人手術在北京積水潭醫院完成,身在北京的骨科專家同時為山東和浙江的兩位患者進行了手術,這次嘗試進一步發展了遠程手術、遠程醫療的形式[30]。同年9月,全軍肝膽外科研究所與康多機器人公司合作,完成了全球首例多點協同5G遠程多學科機器人手術試驗,并且成功地對動物實施了胃腸切除和肝切除[31],為遠程手術機器人的發展奠定了技術基礎。
醫療手術機器人的應用是外科手術的一個重大進步,對于提高手術精準性、節省外科醫生體力等方面具有重大意義。
2.2 醫療康復機器人
中風是21世紀最常見的神經系統疾病之一[32],中風的患者往往會患有行動不便、運動障礙和認知障礙,這些患者都需要專業人員為其做特殊護理。由于老齡化現象的日益嚴重,中風的患者數量會日益增多,醫療系統將無法為每一位中風的患者提供特殊護理。醫療康復機器人可以幫助中風的患者進行運動訓練和康復訓練,可以有效解決醫療系統中康復師短缺的問題[33],成為近年來醫療機器人領域的研究熱點。
運動康復機器人是康復機器人的一種類型,可以幫助運動功能障礙的患者進行骨骼、肌肉和關節的訓練,以恢復或改善其運動功能。2021年,MENG Q L等[34]將末端執行器型機器人與外骨骼型機器人相結合,提出了一種新型基于末端執行器的4自由度空間訓練上肢康復機器人,如圖5所示。該機器人可協助人類上肢進行肩關節屈曲、伸展、內收、外展和肘關節屈曲、伸展的康復訓練。同年,OYMAN E L等[35]提出了一種電纜驅動康復機器人的設計和控制,該機器人可以很容易地配置為在不需要任何矯形器的情況下鍛煉不同的關節,如肘部、肩部、臀部、膝蓋和腳踝。
認知障礙機器人是康復機器人的另一種類型。認知障礙康復機器人可以通過一些與運動相關的刺激與患者進行交互,增強患者對環境的感知,從而恢復患者的認知能力[36]。2012年,KUBOTA N等[37]為單側空間忽視患者開發了CRT機器人。該機器人基于3D距離圖像傳感器,可以觀察人體運動。觀察到的數據可以為治療師提供重要信息,以顯示康復狀態。2018年,ANDRIELLA A等[38]開發了一個嵌入機器人的決策系統,該機器人可以與認知功能障礙的患者建立有效的互動,護理者可以利用該系統在進行認知訓練時激勵和支持患者。
醫療康復機器人的研究和應用是臨床康復技術的一個重大進步,對于行動不便、運動障礙或者認知障礙患者的康復治療具有很大的幫助,有著廣闊的研究前景。
3 高端醫療裝備的研究趨勢
歷經多年的發展,基于醫工融合的高端醫療裝備得到了廣泛的應用,在醫學成像、臨床檢測、治療和康復等領域扮演著越來越重要的角色。但是現有的醫療裝備仍然存在著尚未解決的問題。
醫學電阻抗設備目前在臨床應用中存在眾多的影響因素,例如在采集人體組織的阻抗信息時易受到體位、攝入食物量、體脂含量等因素的影響[39]。如何解決醫學電阻抗設備的檢測結果易受影響因素干擾的問題,仍然需要相關科研人員的進一步研究。
現有的醫療機器人仍然只是起到輔助作用,不能在沒有醫生參與的情況下獨立完成病人的手術和康復過程。實現醫療機器人的自動化、智能化是醫療機器人未來的研究方向。
4 結語
隨著科技的進步、學科交叉的逐漸深入,基于醫工融合的先進醫療設備受到了廣泛的研究,并且已經取得了很多研究成果。本文主要對醫學電阻抗設備、醫療機器人的研究現狀進行了簡要論述,并對未來的研究趨勢進行了分析,為相關領域的研究人員提供一個參考,有利于其未來的研究工作。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2018年11期)2018-08-04 03:26:08
特別健康(2018年2期)2018-06-29 06:13:44
海峽科技與產業(2016年3期)2016-05-17 04:32:12
工業設計(2016年12期)2016-04-16 02:52:00
中國衛生(2014年6期)2014-11-10 02:30:50
消費者報道(2014年7期)2014-07-31 11:23:57
