基于時間順序脈沖神經膜系統的電網故障診斷方法
2022-04-08 11:22:22林德垠
中國新技術新產品 2022年2期
林德垠
(西華大學電氣與電子信息學院,四川 成都 610039)
0 引言
隨著電網規模不斷地擴大,故障的復雜性也不斷增加,利用故障數據進行電網故障診斷可以快速、準確地找出故障區域或故障設備,對迅速恢復供電具有重要意義。近年來,在電網智能故障診斷的研究課題中,許多國內外專家與學者相繼提出多種故障診斷方法,例如專家系統、人工神經網絡、Petri網、解析模型和脈沖神經膜系統等。目前,基于脈沖神經膜系統(Spiking Neural P System,SNPS)的故障診斷方法憑借其邏輯清晰嚴密、推理過程簡單明了的優勢受到廣泛關注。
警報信息中的時間屬性是電網發生故障時的一個重要特征,其包括豐富的故障相關信息,如何利用警報信息中的時間屬性對研究電網故障診斷具有重要意義。文獻[6]將溯因推理應用在電網故障診斷中,解釋了發生故障的原因,并且還原了發生故障的過程。文獻[7]提出了一種基于時間序列相似性匹配的電力系故障診斷方法,該方法利用警報假說時間序列與實際警報時間序列之間的距離來識別故障元件與故障類型。文獻[8]利用保護裝置的時間關聯特性將時間模糊Petri網運用到電網故障診斷中。文獻[9]為了充分利用警報信息的時序特性,提出了一種時態模糊推理實數脈沖神經網絡系統。文獻[10]將警報信息中保護裝置動作的因果關系與脈沖神經膜系統結合起來,提高了故障診斷過程中處理警報信息不確定性的能力。
脈沖神經膜系統是膜計算領域的一個重要分支,它是受生物神經元通過脈沖形式存儲、傳遞和交換信息啟發而提出的一類特殊神經膜系統。SNPS的圖形化診斷模型不僅可以直觀、形象地表達、推理故障知識,而且其強大的分布式并行計算能力能夠有效地處理故障警報信息的不確定性。然而,SNPS在電網故障診斷過程中處理時序信息的能力還較為薄弱,沒有充分利用警報信息的時間屬性以及信息之間的時間約束特性。因此,該文在脈沖神經膜系統的基礎上,利用警報信息中斷路器、繼電器動作的時間屬性以及保護裝置之間的動作順序和時序約束關系建立基于時間順序實數脈沖神經膜系統(Time Sequence Spiking Neural P System with Real Numbers,rTSSNPS)的故障診斷模型。同時,為了簡化對警報信息進行時序處理的過程,該文結合故障診斷模型重新設置推理算法,使算法具有處理警報信息時間屬性的能力,從而提升脈沖神經膜系統處理保護裝置拒動、誤動、時標錯誤和信息丟失等不確定性的能力,進而減少運算步驟,提高故障診斷效率。
1 rTSSNPS
1.1 rTSSNPS定義
可以將1個rTSSNPS定義為多元組,如公式(1)所示。


σ為命題神經元集合,σ=(θ,T,λ,r,w)(1)(為命題神經元的個數);σ為規則神經元集合,σ=(θ,c,T,λ,r,w)(1)(為規則神經元的個數)。其中,θ為第個命題神經元內部脈沖的脈沖值,θ為[0,1]的實數;θ為第個規則神經元內部脈沖的脈沖值,θ為[0,1]的實數;T為命題神經元的時間信息脈沖,每個命題神經元都會產生1個時間信息;T為各個命題神經元之間的時間距離,表示上個命題神經元點火到下個命題神經元激發的時間距離約束;r為命題神經元σ的點火規則,其形式為/α→α(為點火條件;為神經元;為傳遞的脈沖),和為[0,1]的實數;r為規則神經元σ的點火規則,其形式為/α→α(為產生的新脈沖),和為[0,1]的實數;λ和λ分別為命題神經元和規則神經元的點火閥值,它們都是[0,1]的實數;w和w分別為命題神經元σ的輸出權重向量和規則神經元σ的輸出權重向量;c為規則神經元的真值,c為[0,1]的實數,與σ對應的模糊產生式規則的確定性因子相等。該脈沖神經膜系統涉及4種類型的神經元,即一類命題神經元(用符號“”表示)和三類規則神經元,即“常規”“與”和“或”規則神經元,分別用字母“general”“and”和“or”來表示。
1.2 模糊產生式規則
類型一(常規規則)為(-c):IFp(θ,T,T,w)THENp(θ,T),相應的rTSSNPS模型如圖1(a)所示。其中,p與p分別為規則R的前件命題與后件命題;c為規則R的確定因子,c為[0,1]的實數;θ和θ分別為命題p和p產生的真值,θ和θ為[0,1]的實數;T、T分別為完成命題p和命題p所消耗的時間,也可以表示命題神經元σ和命題神經元σ點火的時間點;T為命題p到命題p所消耗的時間,也可以表示命題神經元σ到命題神經元σ的時間距離;w為命題p的權重值。
命題p的真值和時間如公式(2)~公式(3)所示。

其運算符號的解釋如公式(4)所示。

式中:為()維度的邏輯矩陣;、為的時間矩陣;和分別為時間矩陣和中的時間元素;A為矩陣中的邏輯元素;、為該矩陣的行和列。
類型二 (復合“與”規則)為(=c):IF(,,T,)and…andp(θ,T,T,w)THENp(θ,T),相應的rTSSNPS如圖1(b)所示。其中,,…,p為規則R的前件命題;p為規則R的后件命題;c為規則R的確定性因子,c為[0,1]的實數;,…,θ分別為,…,p的真值,,…,θ為[0,1]的實數;θ為命題p的真值,θ為[0,1]的實數;,…,T分別為完成命題,…,p所消耗的時間,也可以分別表示命題神經元,…,σ點火的時間點;T=[T,…,T]分別為命題,…,p到命題p所消耗的時間,也可以分別表示命題神經元,…,σ到命題神經元σ的時間距離;,…,w分別為命題,…,p的權重值。
命題p的真值和時間如公式(5)~公式(6)所示。

類型三(復合“或”)為(-c):IF(,,T,)or …orp(θ,T,T,w)THENp(θ,T),相應的rTSSNPS如圖1(c)所示。其中,,…,p為規則R的前件命題;p為規則R的后件命題;c為規則R的確定因子,c為[0,1]的實數;,…,θ分別為命題,…,p的真值,,…,θ為[0,1]的實數;θ為命題p的真值,θ為[0,1]的實數;,…,T分別為完成命題,…,p所消耗的時間,也可以分別表示命題神經元,…,σ點火的時間點;T=[T,…,T]分別為命題,…,p到命題p所消耗的時間,也可以分別表示命題神經元,…,σ到命題神經元σ的時間距離;,…,w分別為命題,…,p的權重值。

圖1 rTSSNPS 3種模糊產生式規則
命題p的真值和時間如公式(7)~公式(8)所示。

其運算符號的解釋如公式(9)所示。

式中:、為×的實數矩陣;、為×的時間矩陣;為×的邏輯矩陣;max為最大值,、為該矩陣的行和列。
1.3 時間脈沖矩陣推理算法
為了能使算法準確、高效地表達和推力知識,減少運算的復雜程度,更加契合故障診斷過程中保護裝置動作的邏輯關系,該文根據線路和母線的故障診斷模型將推理算法分為算法一和算法二。其中,算法一完成線路送端與受端雙向并行矩陣推理運算以及母線各個出線方向多向并行矩陣推理運算任務;算法二綜合線路送端與受端、母線各個出線方向輸出結果對故障元件進行識別。時序脈沖矩陣推理算法如下。
算法一如下。
輸入:W,W,T,,λ,λ,,,,
輸出:神經元的時間與真值
令推理步驟=0
根據輸入的初始條件計算根據、、、計算
則推理步數=+1
While (<3)do
for 每個命題神經元 do
if 點火規則={α,θ≥λ,1}滿足,then該命題神經元點火并根據公式
計算和
if 命題神經元存在突觸后規則神經元 then 該命題神經元向其突觸后規則神經元發送1個脈沖和時間
else 該命題神經元僅積累脈沖和時間
for 每個規則神經元do
if 點火規則={α,δ≥λ,1}滿足,
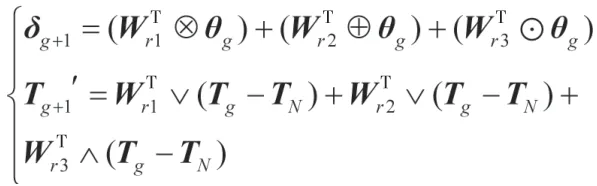
then 該神經元點火并根據公式
計算θ與,并向其突觸后命題神經元發送1個脈沖與時間

其中,θ=[,…,θ]為命題神經元的實數脈沖值矩陣θ(=1,…,) 為[0,1]的實數,表示第個命題神經元的脈沖值;δ=[,…,δ]為規則神經元的實數脈沖值矩陣,δ(=1,…,)為[0,1]的實數,表示第個規則神經元的脈沖值;=(,…,c)為規則神經元的對角矩陣,c(=1,…,) 為[0,1]的實數,表示第個規則神經元的真值;T=[,…,t]為當前所在推理步驟命題神經元的時間矩陣,該矩陣包括個命題神經元的動作時間,t(=1,…,)為時間信息,表示第個命題神經元點火的時間;T=[t,…,t]為規則神經元的時間距離矩陣,t(=1,…,)時間常量,表示規則神經元前件命題神經元的點火到規則神經元后件命題神經元激發時消耗的時間;W為規則神經元到命題神經元的突觸權重矩陣;W、W、W分別為命題神經元到“常規”規則神經元、“與”規則神經元以及“或”規則神經元的突觸權重矩陣;λ=[λ,…,λ]為命題神經元的點火閥值矩陣,λ(=1,…,) 為[0,1]的實數,表示第個命題神經元的點火閥值);λ=[λ,…,λ]為規則神經元的點火閥值矩陣,λ(=1,…,)為[0,1]的實數,表示第個命題神經元的點火閥值。
算法二如下。
輸入:W,W,T,,,
輸出:神經元時間與真值
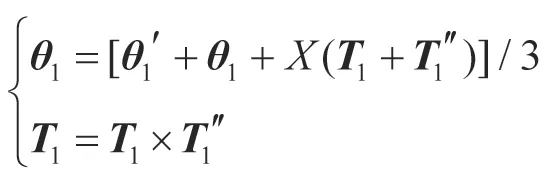
綜合算法一的輸出結果令推理步驟=3,計算
輸出:θ=[θ+(T)]/2和T
如果給出rTSSNPS中輸入神經元的初始脈沖值、時間點約束矩陣以及各個命題神經元之間的時間距離約束矩陣,那么該系統通過執行算法一和算法二就能夠獲得其余命題神經元的真值與時間點約束區間。θ=[,…,θ]為命題神經元的實數脈沖值矩陣,θ(=1,…,)為[0,1]的實數;δ=[,…,δ]為規則神經元的實數脈沖值矩陣;δ(=1,…,)為第個規則神經元的脈沖值,δ(=1,…,)為[0,1]的實數;=diag(,…,c)為規則神經元的對角矩陣;c(=1,…,)為第個規則神經元的真值,c(=1,…,)為[0,1]的實數;T=[,…,t]為當前所在推理步驟命題神經元的時間矩陣,該矩陣包括個命題神經元的動作時間;t(=1,…,)為時間信息(第個命題神經元點火的時間);T=[t,…,t]T為規則神經元的時間距離矩陣;t(=1,…,)為時間常量(規則神經元前件命題神經元點火到規則神經元后件命題神經元激發時消耗的時間);W為規則神經元到命題神經元的突觸權重矩陣(如果規則神經元σ到命題神經元σ存在突觸,則w∈(0,1],其等于突觸(,)的輸出權重,否則w=0;W,W,W分別為命題神經元到“常規”規則神經元、“與”規則神經元以及“或”規則神經元的突觸權重矩陣(如果命題神經元σ到規則神經元σ存在突觸,則w∈(0,1],其等于突觸(,)的輸出權重,否則w=0;λ=(λ,…,λ)為命題神經元的點火閥值矩陣;λ(=1,…,)為第個命題神經元的點火閥值,λ(=1,…,)為[0,1]的實數;λ=(λ,…,λ)為規則神經元的點火閥值矩陣;λ(=1,…,)為第個命題神經元的點火閥值,λ(=1,…,)為[0,1]的實數。
在該算法中,各個乘法算子定義如公式(10)所示。

式中:為×的實數矩陣;、為×的時間矩陣;為一種運算推理過程。
對故障診斷模型來說,已知原因事件實際動作時間(t)及通過時間推理得到的原因事件的動作時間(t),利用公式(10)判斷推理過程是否準確,如公式(11)所示。

式中:為×的實數矩陣;為×的時間矩陣;為一種運算推理過程。
對故障診斷模型來說,利用公式(11)檢查事件經過時序信息處理是否因故障而動作,如公式(12)~公式(13)所示。
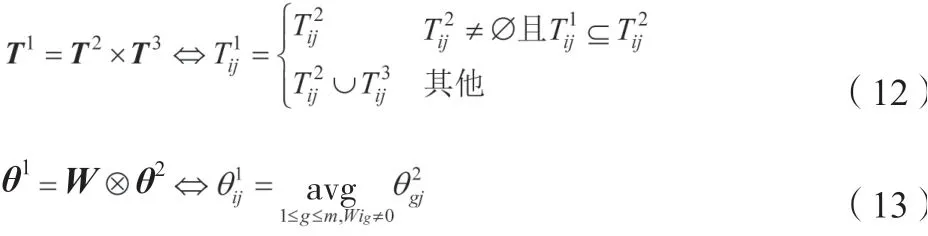
式中:、為×的實數矩陣;為×的邏輯矩陣;avg為數值取平均數。

式中:為×的實數矩陣;為×的邏輯矩陣;plus為數值相加。
2 基于rTSSNPS的電網故障診斷模型
該文簡化利用時序信息的過程,將保護裝置動作的時間屬性融入故障診斷模型中,使神經元不僅能夠傳遞脈沖值,而且能夠傳遞時間信號;同時,通過建立診斷模型增強拓撲結構的適應能力,降低計算的復雜程度,提高了故障診斷的效率。
2.1 利用時序信息
當電網發生故障時,保護裝置動作有嚴密的邏輯關系,以線路或母線故障為起點,保護裝置動作的先后順序如下:主保護繼電器及其對應的斷路器動作,近后備保護繼電器及其對應斷路器動作,遠后備保護繼電器及其對應斷路器動作。主保護、近后備保護和遠后備保護動作的時間約束分別為10 ms~40 ms、310 ms~340 ms和450 ms~510 ms,斷路器到各相應保護繼電器的時間約束為20 ms~60 ms。
結合rTSSNPS故障診斷模型,為了簡化處理警報信息中時間信息的過程,根據文獻[11]并利用t及其對應時間距離約束(t,t)得到該事件的前驅事件以及前驅事件的時間約束,如公式(15)所示。式中:(t)為該事件的前驅事件的時間約束;(t)為該事件的時間約束。

2.2 故障診斷模型
以IEEE39節點系統為例,建立線路L診斷模型(圖2)。該文根據保護裝置動作時間先后的邏輯關系建立故障診斷模型(當診斷電網故障時,根據從元件故障到繼電器動作再到斷路器跳閘的動作順序和時間約束建立診斷模型),每個命題神經元都會被賦予1個脈沖值和1個時間點約束。其中,脈沖值表征該命題神經元的置信度,時間點約束表征該命題神經元點火的時間約束。此外,命題神經元之間都會有1個時間區間約束,表征從上一個命題神經元點火到下一個命題神經元激發所消耗的時間。
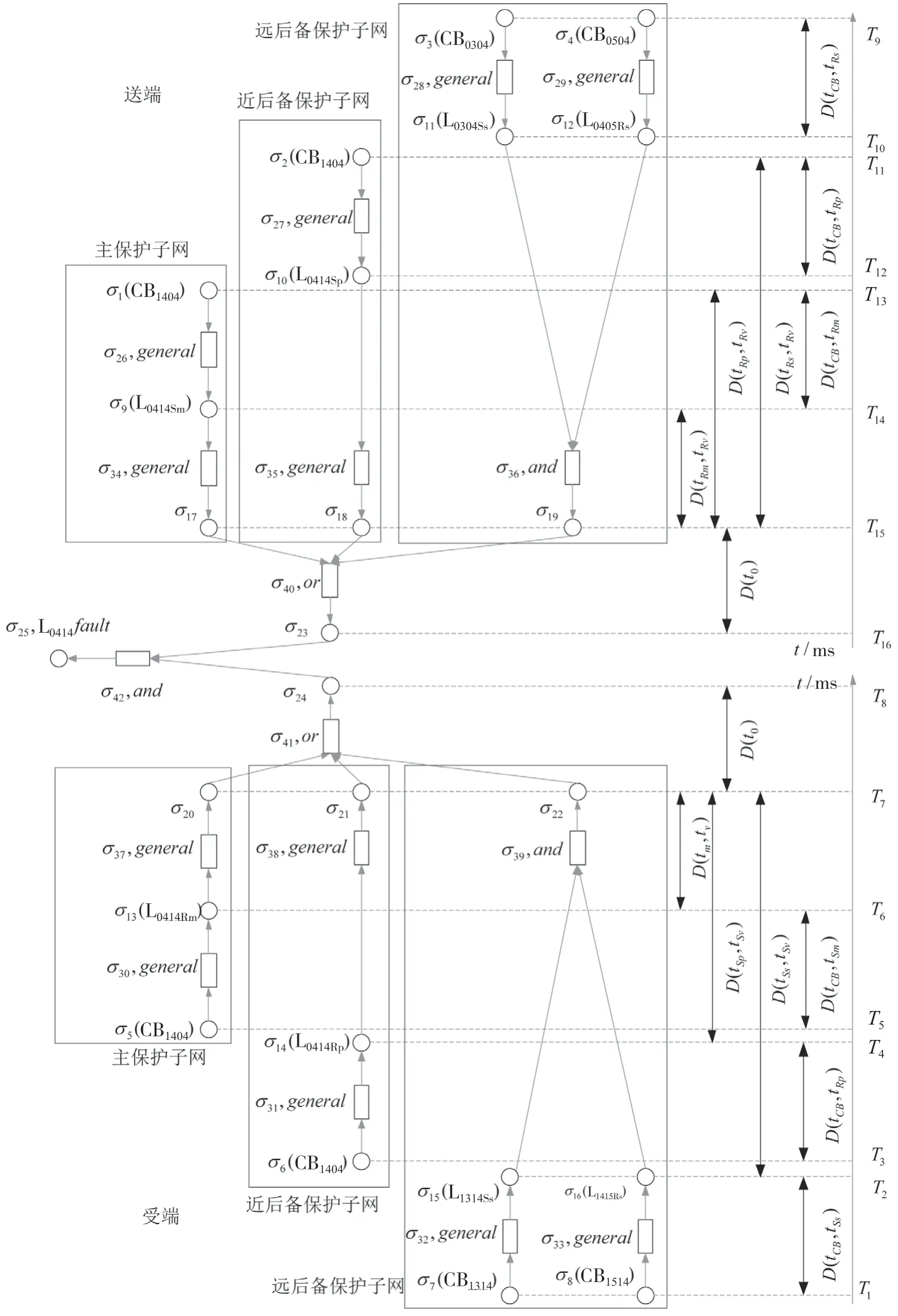
圖2 線路L0414的rTSSNPS的故障診斷模型
為了更直接、更清晰地將警報信息展示在建立的診斷模型中,用~表示警報信息中保護裝置的動作時間,用(t,t)、(t,t)等表示保護裝置之間的時間約束。與文獻[10]不同,該文提出的故障診斷模型直接將警報信息的時間點約束矩陣、保護裝置之間的時間距離約束矩陣和保護裝置的初始置信度作為輸入,將元件故障概率和故障約束時間作為輸出,簡化處理警報信息中時間信息的過程,從而提高故障診斷的效率。
同時,該文為了使診斷模型適應電網拓撲結構的變化,根據動作時間的先后邏輯建立故障元件的診斷模型。當線路發生故障時,在線路的送端與受端分別建立主保護子網、近后備保護子網以及遠后備保護子網;當母線發生故障時,在母線的出線方向分別建立主保護子網、遠后備保護子網。當拓撲結構發生變化時,線路故障診斷模型只需要增加或減少遠后備保護及其對應的斷路器,母線故障診斷模型只需要增加或減少出線方向的診斷子網絡, 保證故障診斷模型拓撲結構、突觸連接矩陣、輸入矩陣及輸出矩陣的變動較小。
2.3 診斷方法流程圖
基于rTSSNPS的故障診斷方法的具體操作流程,如圖3所示。
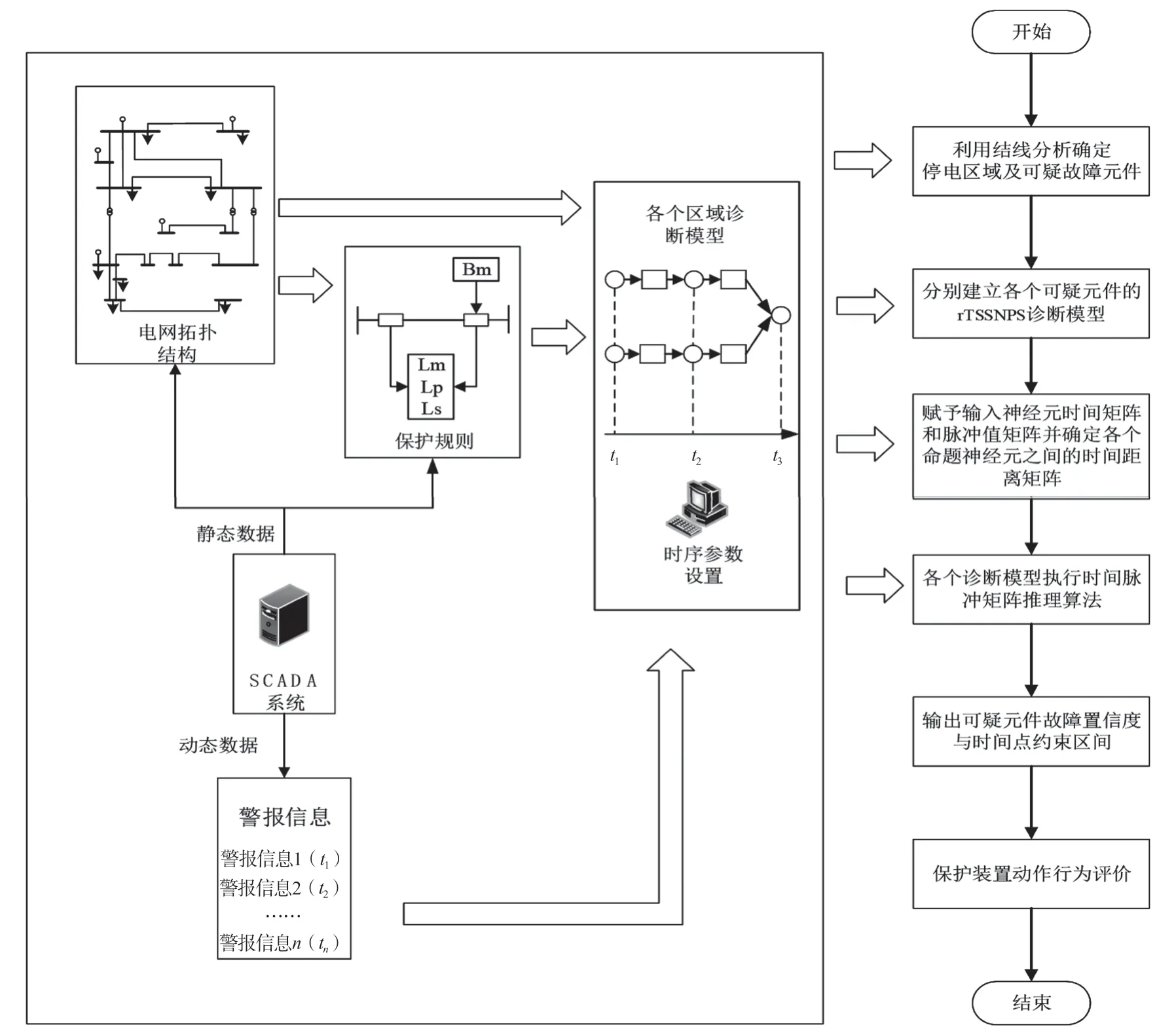
圖3 故障診斷流程圖
步驟一:確定故障區域中的可疑元件集={,,…x}。在SCADA系統中讀取有關保護裝置的動作信息,利用結線分析法判斷停電區域中的可疑故障元件集。
步驟二:建立故障診斷模型。利用保護裝置邏輯動作規則和警報信息的時間信息分別針對各個可疑故障元件x建立基于rTSSNPS的故障診斷模型。
步驟三:獲取輸入神經元脈沖值和時間矩陣。根據表1 和表2的保護裝置動作的可信度與保護裝置為未動作的可信度,并結合實際動作信息賦予輸入神經元脈沖值,利用警報信息的時間信息賦予并確定輸入神經元的時間矩陣,再根據保護動作邏輯規則確定各命題神經元之間的時間距離矩陣。
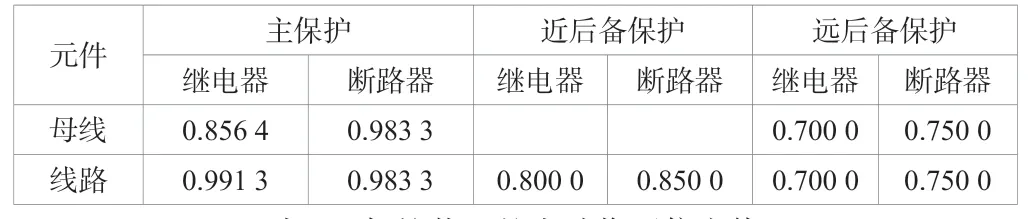
表1 保護裝置的動作可信度值

表2 保護裝置的未動作可信度值
步驟四:判斷故障元件。對故障區域中的各個可疑元件x執行時間脈沖矩陣推理算法,并計算輸出神經元的時間點約束區間及其脈沖值。其中,設置輸出神經元的故障閥值為0.5,判定數值大于0.5的元件為故障元件,否則無故障元件。
步驟五:輸出診斷結果。將步驟四推理得到故障元件及相關時間區間與警報信息進行對比,判斷保護裝置是否存在拒動、誤動以及漏報等情況。
3 算例分析
基于IEEE39節點系統模擬不同場景下的電網故障診斷過程,以驗證該文提出的模型的有效性和容錯性。這些場景包括狀態信息不完整和不確定的復雜故障,警報信息見表3。將該文提出的方法與文獻[10]、文獻[12]中的2種經典故障診斷方法進行對比,結果見表4。同時,將該方法與近年來提出的故障診斷方法進行對比分析,結果見表5。
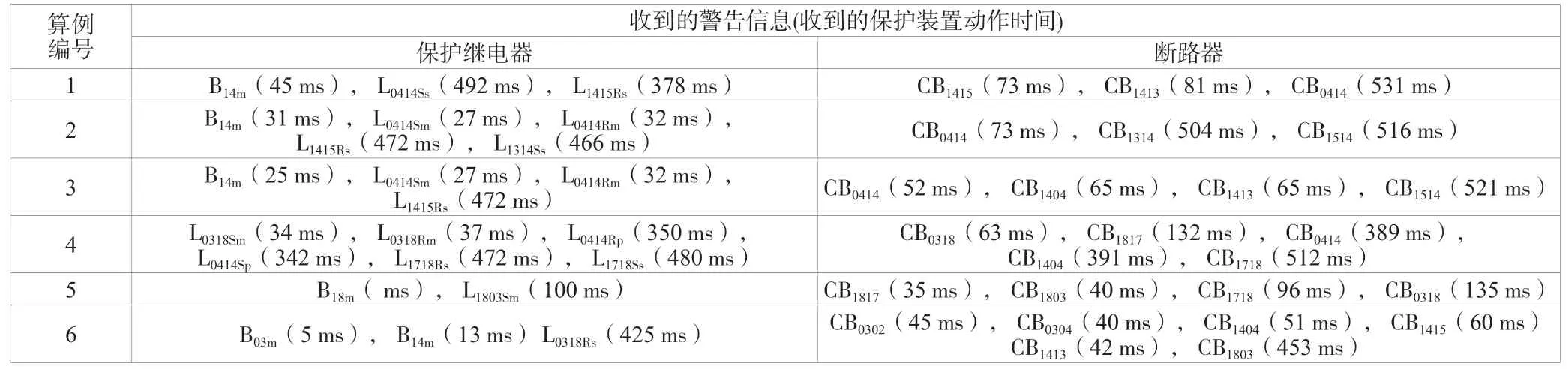
表3 保護裝置故障信息
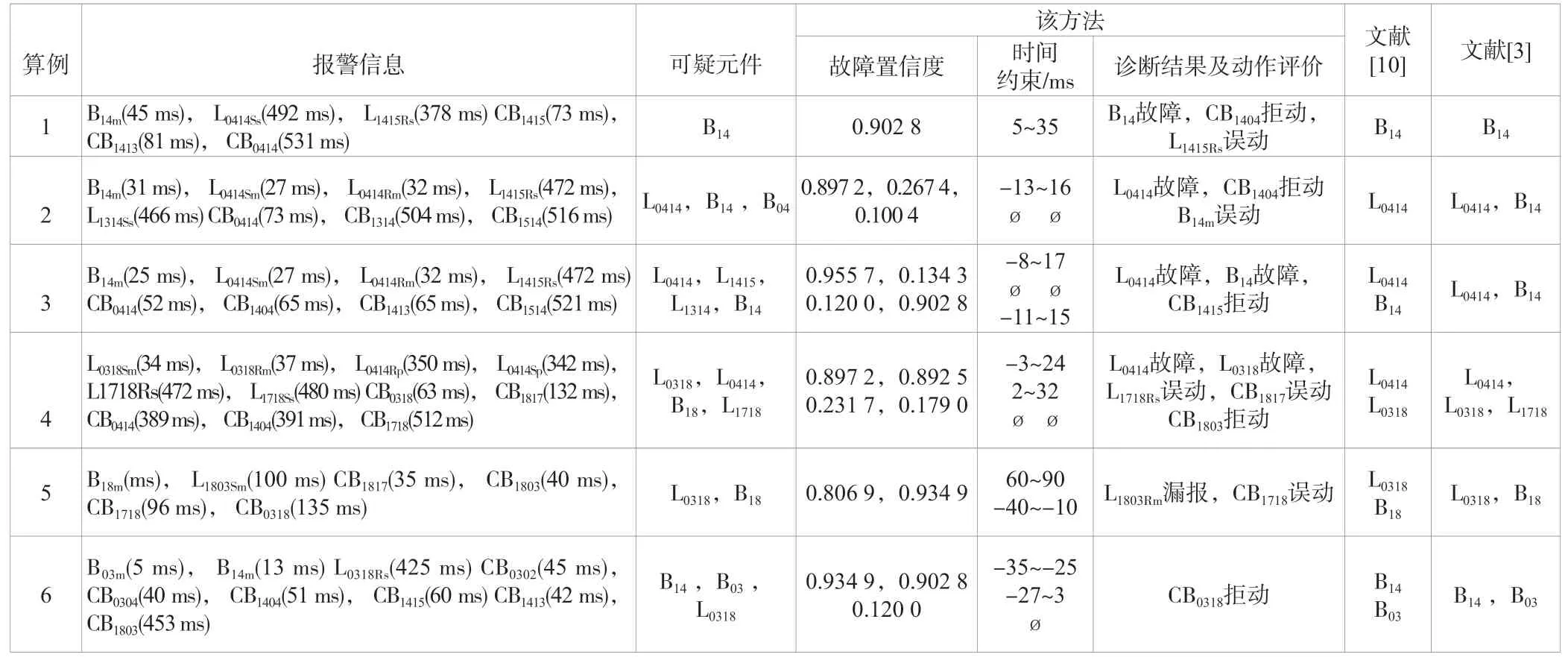
表4 算例識別結果與比較
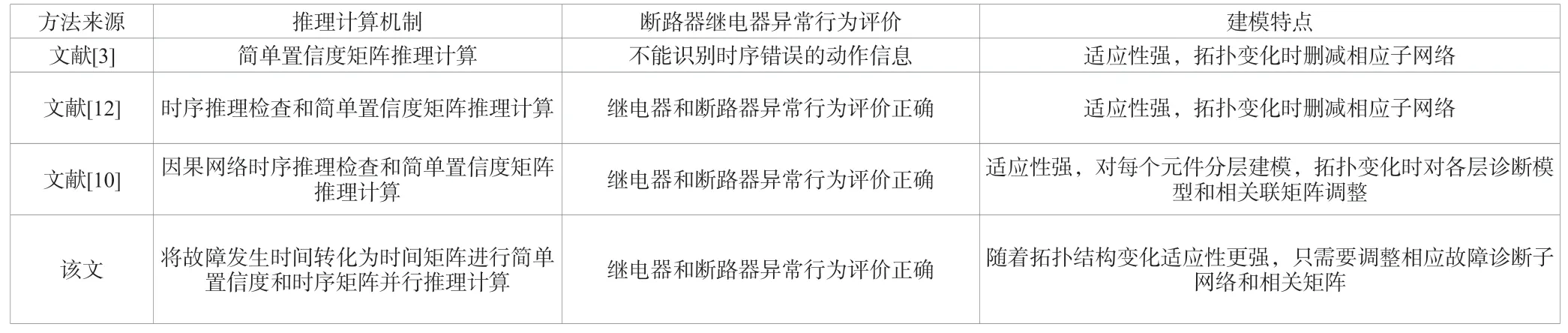
表5 該文所采用的方法與現有3種方法的對比
表4中算例一~算例二為單一故障,算例三~算例六為多重故障。對算例一、算例三、算例五和算例六來說,3種方法都能準確識別故障元件,然而文獻[12]未能明確不同故障元件的時間點約束與時間區間約束的關聯屬性,其在算例二中錯誤診斷母線B發生故障,在算例四中錯誤診斷L發生故障。從表5中可以看出,文獻[3]不能識別時序錯誤的動作信息,而文獻[10]與文獻[12]雖然能夠正確地對保護裝置進行評價,但是由于2種方法都需要先對警報信息進行時序處理,因此診斷速度較慢。
對表4與表5進行分析可知,該文提出的故障診斷方法,充分利用警報信息中保護裝置的時序信息以及保護裝置之間的時序約束關系,并將其在建立的診斷模型上直觀地表現出來,實現了時序信息與故障置信度的并行推理,能夠快速處理繼電器/斷路器拒動、誤動以及警報信息缺失等復雜情況,進而準確識別故障元件,提高故障診斷的效率,具有較高的容錯性(以算例二和算例三為例進行詳細說明)。
算例二:單重故障。在發生故障后,調度中心收到的警告信息為B(31 ms)、L(27 ms)、L(32 ms)、L(472 ms)、L(466 ms)、CB(73 ms)、CB(504 ms)以及CB(516 ms)。采用基于rTSSNPS的故障識別方法對該案例進行故障診斷的流程如下。
步驟一:確定故障區域可疑元件集。根據警報信息利用結線分析法搜索故障區域得到可疑故障元件集={B,L,B}。
步驟二:建立故障診斷模型。根據可疑故障元件集={B,L,B}分別針對線路L、母線B和母線B建立基于rTSSNPS的故障診斷模型(由于篇幅有限,算例二以線路L為例進行詳細說明,其故障診斷模型如圖2所示)。
步驟三:獲取輸入神經元脈沖值和時間矩陣。該文以線路L送端診斷模型為例進行推理說明,輸入神經元脈沖值和時間矩陣分別如公式(16)~公式(20)所示。
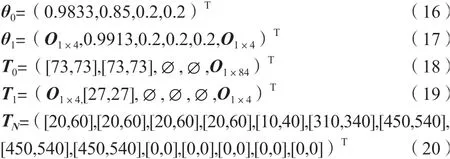
式中:為零矩陣(不同下角標對應不同的運算規則);?為警報信息未包括該保護裝置動作的時間信息。
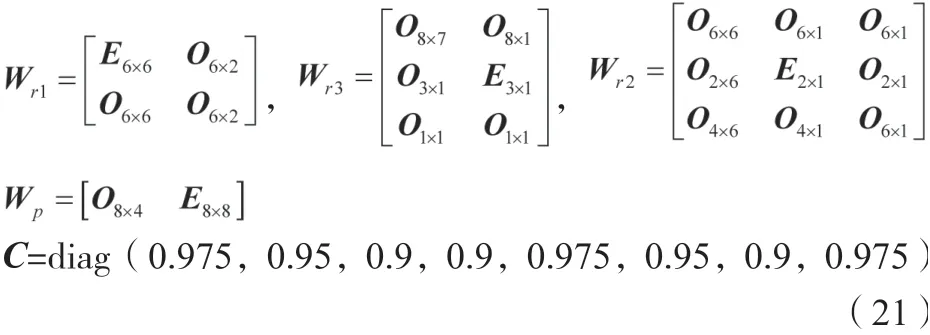
相關突出權重矩陣如公式(21)所示。
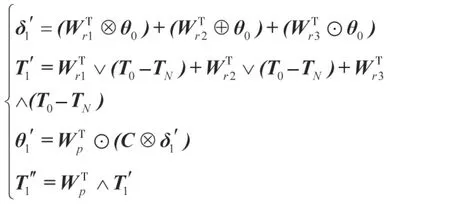
步驟四:判斷故障元件。線路L送端診斷模型執行時間脈沖矩陣推理算法,當=0時,推理得到的結果如公式(22)所示。

當=1時,推理得到的結果如公式(23)所示。

當=2時,推理得到的結果如公式(24)所示。

同理,可以得到其受端診斷模型的輸出脈沖值與時間點約束分別為0.694 7和-38 ms~16 ms,則執行時序脈沖矩陣推理算法二得到輸出結果為0.897 2和-13 ms~16 ms。因此,判斷線路L為故障元件,其故障概率為0.8972,故障時刻為-13 ms~16 ms。類似的利用相關報警信息構建母線B和B的rTSSNPS故障診斷模型,2條母線故障概率分別為0.267 4和0.100 4。
步驟五:輸出診斷結果。根據步驟四對故障元件的判斷并結合SCADA系統中獲得的警報信息可以推出線路L在-13 ms~16 ms時刻發生故障。其中,在線路L發生故障后,線路兩端主保護正確動作,送端斷路器CB跳閘,但是線路受端CB拒動,由線路受端遠后備保護L、L動作跳開兩端斷路器CB、CB,而B誤動,B無故障。
算例三:多重故障。故障發生后調度中心收到的警告信息為B(25 ms)、L(27 ms)、L(32 ms)、L(475 ms)、CB(52 ms)、CB(65 ms)、CB(65 ms)、CB(65 ms)以及CB(521 ms)。
算例三的診斷過程與算例二相同,首先,確定故障區域可疑元件集={L,B,L,L}。其次,分別建立可疑元件的故障診斷模型,并根據警報信息獲取輸入神經元脈沖值與時間矩陣,根據矩陣推理算法得到可疑故障元件的故障置信度和時間點約束分別為(L,0.9557,(-8 ms~17 ms))、(B,0.9028,(-11 ms~15 ms))、(L,0.1200,?)以及(L,0.1343,?)。最后,根據故障元件的判斷以及相關警報信息可知,線路L在-8 ms~17 ms時間段發生故障,線路兩端主保護正確動作并作用于相應斷路器跳閘;母線B在-11 ms~15 ms時間段發生故障,母線B的L和L出線方向主保護正確動作跳開相應的斷路器,但是母線B的L出線方向斷路器CB拒動,其遠后備保護L動作跳開斷路器CB,線路L、L無故障。
4 結論
該文提出了一種改進的時間順序實數脈沖神經膜系統電網故障診斷模型和算法,根據警報信息的時間屬性與保護裝置之間的時序約束邏輯關系建立故障診斷模型, 減少其拓撲結構隨著網絡變化的調整幅度;將繼電器和斷路器的初始置信度和其動作時間作為時序脈沖矩陣推理算法的輸入,將元件故障概率和元件故障約束時間區間作為輸出,省去保護裝置時序約束一致性判斷步驟;將時間脈沖矩陣推理算法與rTTSNPS故障診斷模型相結合,實現并行推理運算,減少了計算的復雜程度。該方法充分運用保護裝置動作的時間邏輯關系,簡化時序推理過程,拓撲結構適應性強, 可以提高故障診斷效率,還可以處理警報信息缺失、時標錯誤,保護裝置拒動誤動等問題。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
汽車維修與保養(2019年7期)2020-01-06 03:30:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
