基于三維激光掃描的煤礦開采地表監測
2022-04-07 10:09:02李建勛
煤 2022年4期
關鍵詞:煤礦
李 磊,李建勛,李 旭
(陜西澄合山陽煤礦有限公司,陜西 澄合 715306)
很多煤礦開采需要研究地表的變化規律,降低煤礦開采對地表的破壞和影響,由此延長礦井的開采年限。煤礦開采對地表移動的影響是力學作用的過程,需要進行現場實地監測。煤礦開采一般都位于田野荒地附近,架設的監測儀器經常會被惡劣的自然環境破壞或者丟失,監測過程也因地形多變而出現數據不準、數據不全、數據監測困難等問題[1]。到目前為止還有很多煤礦的地表數據是不完整的。
針對上述問題,傳統的解決方案是借助無人機設備動態快速監測,但無人機監測的成本較高,監測預算低的項目無法使用。而使用GPS或地面水準儀的方式進行監測又忽略了煤炭開采的地表監測需要更三維性的問題,煤礦開采造成最多的問題就是地表塌陷,不僅是地表下沉,而且是整個空間下沉的情況。GPS或地面水準儀只能監測到地表下沉的程度,卻無法反映下沉的嚴重程度。
三維激光掃描技術是一種新發展的測量技術,可以代替地面水準儀等平面測量技術進行三維坐標的測量,適合需要空間測量的地區。三維激光掃描技術采集數據的速度非常快,可以避免儀器因長時間處于田野荒地而被破壞[2]。三維激光掃描技術的應用需要一定的設備支持,包括激光掃描儀、外接電源、PC機以及三角支架。通過各種設備的協作可以實現高密度、高速度、高精度掃描,從而獲取煤礦地表相關數據。從傳統的測量塌陷點變成了測量塌陷面,使檢測數據更加具體、全面,而且不需要將測量點建設在農田當中,避免了占用農田,做到了綠色和環保監測。
1 三維激光掃描儀運行原理分析
三維激光掃描儀應具備兩項基礎功能:測距功能和掃描功能,將兩項功能搭建在同一個系統當中,還應對采集的地表檢測圖像數據進行校驗,因此,還應包含集成數字攝影設備和圖像識別校正系統。在三維激光掃描儀的測距過程中,應用的原理為TOF脈沖原理。首先利用激光掃描儀按照坐標進行地表數據的掃描,獲取掃描目標點是通過云數據的進行確定的。發射裝置每秒要發出以百萬計的掃描激光束,地表接收到這些光束后,激光脈沖在地面發生脈沖作用,并由地面的接收裝置對反射后的脈沖進行接收,經由儀器獲得相應的地表數據。地表的坐標獲取通過三維激光掃描脈沖反射時間和激光傳播速度等條件進行獲取。激光脈沖橫向掃描角度值設定為α,縱向掃描角度值設置為β。從三維激光掃描儀的內部系統進行各激光脈沖接觸點的坐標的獲取,直角坐標方式的數據可以通過以下公式進行計算:
(1)
式中:Cg為地表監測的三維激光掃描儀的激光在無阻礙的前提下的傳播速度;t為掃描儀的掃描時間;Co為三維激光掃描儀的激光在無阻礙且真空的情況下的傳播速度;ng為該三維激光掃描儀的特性參數。
三維激光掃描儀由時間計數器、激光發射器、信號接收器、反射鏡、水平位移控制器、微型計算機和相機組成。其中反射鏡的動力設施為馬達,反射鏡可以進行360°自動旋轉[3]。相機與微型計算機相連,三維激光掃描儀的動力驅動可以進行兩種選擇,直接連接外接電源或自帶電池,根據現場的具體情況可以隨意切換。當使用外接電源工作緊急停電時,切換內置電池工作不會導致機械驟停,監測工作不會中斷。三維激光掃描儀的支架只需要購買市面上對應型號的支架即可。
三維激光掃描儀可以進行自由旋轉和擺動。微型計算機中安裝的軟件應為數據處理軟件和Point cape軟件。三維激光掃描儀的掃描速度可以達到8 000點/s,在天氣晴朗的條件下掃描距離可達到500 m,掃描儀在反射鏡進行90°旋轉的情況下掃面距離也有正常掃描距離的一半。而在多云、光線不足的天氣或陰雨天,掃描距離最遠可達到300 m,反射鏡進行90°旋轉的情況下掃描距離可達到150 m左右。測量水平傾角小于12°,豎直傾角小于15°[4]。三維激光掃描儀的觀測站點需要建立三維坐標系,如圖1所示。

圖1 三維坐標示意
取采樣點命名為P,以P為中心建立直角坐標系(X,Y,Z),取另一個檢測點為S,掃描儀掃描的光線與X軸之間的夾角為b,S點與P點連線與X軸形成的夾角為a。坐標系的計算公式如下:

(2)
采用上述三維激光掃描儀進行煤礦開采地表監測,應將煤礦開采地區需要監測的區域設置為4個導線點,掃描順序由一端的導向點向另一端的導線點依次進行掃描。水平位移控制器先控制各導線點的高程,然后掃描儀開始掃描數據,并將數據進行坐標轉換[5]。
2 地表監測的三維數據獲取
三維激光掃描儀將中心掃描點的坐標定為0,獲取測量數據的流程如下:
數據獲取可分為點坐標的獲取和空間坐標的獲取。這就涉及兩期數據的采集,第一期數據的采集需要先布置掃描控制網,以坐標0點為起算點,在閉合導線上設置6個觀察點,其中4個為常用觀察點,2個為變化觀察點[6]。變化觀察點隨著常用觀察點的掃描順序而變化,變化原則是一直圍繞在常用觀察點的兩側。在常用觀察點上架設三維激光掃描儀,確保掃描儀旋轉一周可以覆蓋整個需要掃描的范圍,完成第一次點坐標的數據采集。
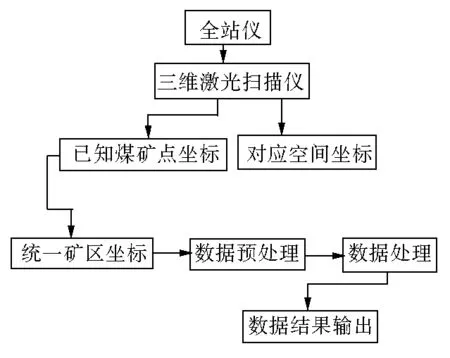
圖2 測量獲取數據流程
在三維激光掃描儀點云數據的獲取過程中,最重要的特征就是保證地表數據的完整性。因此需要對目標地點進行多視點的掃描,對云數據的精度影響最大的因素是三維點云空間數據的獲取準確性。第一影響準確性的因素為激光束發射密度,在其他條件不變的情況下,激光束發射密度越大精確性越高。第二個影響激光掃描精度的因素為掃描儀與被觀測地表之間的距離,在物體和掃描儀的距離保持不變的情況下,為提高三維地形點云數據的精準性,提升激光速發射的密度。但物理方式提升數據的精度存在弊端,最嚴重的一個技術缺陷是在監測的地表和激光光束之間有很多無法規避的障礙物。激光束在半路被阻攔,無法到達所監測的地表表面,此時掃描儀收集的數據就會存在數據缺陷。因此在增加光束密度的基礎上,還應對地表進行多次掃描,變換角度進行掃描,降低數據缺失的概率。設置多角度掃描的關鍵點,每個掃描站點設置5個掃描關鍵點。將掃描的激光點云數據在掃描點拼接起來,高密度的點云數據比普通的點云數據精度更高。數據中包含很多錯點、雜點、虛點,必需對數據進行處理,對錯誤數據進行剔除。基于上面說到的4個常用觀察點,以坐標0點向X軸方向,距離為掃描儀直徑的坐標點為第二個檢測點。增加變化觀察點的個數,由兩個變化觀測點變為3個,3個觀察點連接呈三角狀圍住常用觀察點進行掃描[7]。在常用觀察點上架設三維激光掃描儀,并在變化觀察點上放置反向標靶,反向標靶呈三角圍繞三維激光掃描儀,16個觀察點可同時進行數據采集。
將采集到的數據進行坐標轉換,例如將點坐標Pa轉換為空間坐標Pb,參照下面的公式:
Pb=(1+o1)Pa+△PⅡ
(3)
式中:o1為參數尺度;Pa為掃描儀的常用坐標點;△PⅡ為各監測點在坐標原點的統一坐標。通過公式進行坐標轉換后,點坐標變為三維坐標。
3 地表監測的三維數據處理
數據處理步驟分為數據修改、坐標糾正、數據過濾和三維建模,最后通過單位建模的模型產品進行最終監測結果分析。
數據處理采用的是在計算機上提前安裝好的Geomagic Qualify數據分析軟件,將轉換好的數據輸入到該軟件當中,掃描儀可在短時間內獲取大量的數據,掃描儀對獲取的數據進行無差別采集,在進行數據分析的時候首先要對目標之外的數據進行刪除。只要將目標數據的特征輸入計算機當中,它就會自動將錯誤的數據進行刪除,為避免在刪除中出現誤刪的情況,刪除的數據暫時被儲存到回收站當中,需要人工進行核對之后才能清空回收站[8-9]。
正確的數據中也存在因為掃描范圍重疊而收集來的重復數據,雖然這些數據對后續的結果分析沒有任何影響,但是會加大計算機的運算量,占據內存,所以重復的數據也應該刪除,提升數據分析的效率。坐標糾正是數據處理中比較關鍵的環節,三維掃描將目標物的掃描數據統一成空間坐標后,進行坐標數據拼合[10],省去了點坐標繪制平面圖,再將平面圖轉化為三維圖的過程,直接省去繪制平面圖的步驟,將坐標進行拼合。
數據過濾看似和數據刪除的功能相似,但區別很大,數據刪除是指將非目標數據進行刪除,而數據過濾是將正確數據中的噪聲進行過濾。噪聲可能是在獲取數據時的合理誤差帶來的,也可能是掃描儀掃描的過程中帶來的。噪聲數據如果不進行降噪處理會造成曲線不光滑、三維模型精度低等結果。數據處理過后可以進行格網的建立。由于數據的離散性,需要將相鄰的點數據進行連接,三維模型中的數據沒有拓撲關系,所以在格網建立的時候要提前建立好數據之間的關系。將三維的離散數據投影在平面上,為模型的建立做準備[11]。在Geomagic Qualify數據分析軟件中數據可以多種格式輸入,該數據分析軟件可以自動生成監測報告,數據分析結果中數據和圖形一應俱全,可以滿足大部分工作對煤礦開采地表監測的需求。
4 實例分析
為了驗證基于三維激光掃描的煤礦開采地表監測方式和傳統GPS監測方式相比,哪種方式誤差最小,用兩種方式對同一塊煤礦開采區進行地表監測,對比數據誤差率。基于三維激光掃描的監測方法的應用如上述分析,而GPS監測方法則需要布設觀測站,具體方法參見文獻[9]。
4.1 實驗區基礎信息
某采用頂煤開采方式的煤礦,煤礦走向長500 m,煤礦的整體可開采面積為3 659 m2,煤礦傾斜長度為走向長度的一半,煤層平均厚度為5.5~7.5 m,煤層存在一定傾角,傾角最大的地方不超過15°,煤層的頂板厚度為100 m,煤層上覆蓋的多為黏土層和細沙層。
4.2 實例監測結果
使用傳統方法和基于三維激光掃描的煤礦開采地表監測方式對上述煤礦進行地表監測測試,對比集中方式的檢測誤差率,實驗結果見表1。

表1 誤差率對比 單位:%
由表1可知,三種方式的數據誤差不相上下,但兩種方式的坐標誤差就遠遠大于本文設計的方式。因此也導致本文設計的方法比傳統方法誤差率小。
另外,使用三維坐標展示煤礦監測情況,X軸、Y軸、Z軸的監測情況如圖3所示。
由圖3可以看出,坡頂部分沿著X軸方向有變化,也有向坡底運動的趨勢,最大水平移動量為1.132 6 m,坡頂也在向Y軸正方向移動,最大水平位移為0.413 9 m,但坡底是沿著Y軸負方向移動,坡頂Z軸負方向位移較大,最大位移為-2.112 7 m。由此可以看出,運用三維激光掃描技術不僅可以清晰地看出不同方向上煤礦的變化情況,也可以對煤礦開采時期的地表情況進行監測。由此證明本文設計的方法對煤礦開采地表監測結果準確性較好,具有實用性。
5 結 語
為解決傳統GPS監測方法中存在的問題,將三維激光掃描技術應用于煤礦開采地表監測中。將傳統GPS監測對點和地面水平面的研究轉化為對三維立體圖像的研究,解決了野地荒田監測困難、信號弱導致數據收集不全的問題。文中不僅從理論層面分析了本文設計方法的可行性,還通過對比實驗證明了基于三維激光掃描監測方法的可行性、實用性。希望通過本文研究為煤礦開采地表監測提供新思路。

圖3 煤礦監測三維圖
猜你喜歡
經濟技術協作信息(2018年22期)2019-01-19 03:00:22
工業設計(2016年4期)2016-05-04 04:00:23
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年11期)2014-02-27 14:17:24
河南科技(2014年11期)2014-02-27 14:09:47
河南科技(2014年10期)2014-02-27 14:09:19
河南科技(2014年5期)2014-02-27 14:08:27
河南科技(2014年8期)2014-02-27 14:08:07
河南科技(2014年8期)2014-02-27 14:07:44
