基于分布式IMU的相控陣雷達運動補償研究
2022-04-01 02:13:28吳旭華李振威馮鑫濤張亞崇程詠梅
彈箭與制導學報 2022年1期
關鍵詞:變形
陳 璞,吳旭華,李振威,馮鑫濤,張亞崇,程詠梅
(1 西安飛行自動控制研究所,西安 710065;2 西北工業大學自動化學院,西安 710129)
0 引言
相控陣天線具有指向性強、探測性強和可靠性高等優勢,廣泛應用于雷達系統中[1-2]。相控陣雷達通過控制信號的相位進而控制波束指向,而相位誤差主要由陣元的位置誤差所引起,因此相控陣雷達對安裝位置有較高的精度需求。在相控陣雷達工作過程中,載體的振動和氣流的沖擊等都有可能導致陣面變形,引起陣元位置發生變化,并導致天線增益下降、波束指向精度降低,最終造成雷達性能的下降。上述問題對于蒙皮天線式相控陣雷達更為明顯,安裝于機翼時,由于飛機機翼并非剛體,在飛行過程中受氣流、負載變化等因素的影響,機翼會發生一定程度的撓曲變形[3],將對雷達的性能造成較大的影響。Wang等從概率統計的角度分析了陣面隨機位置誤差對陣列天線性能的影響[4]。王從思等從機電耦合方面分析了彎曲等變形對電性能的影響,建立結構與電磁耦合模型,將陣面隨機誤差和陣面變形結合起來,分析了多種誤差下對電性能的影響,并從陣面隨機誤差和陣面變形誤差兩方面分析對電性能的影響,比較了兩者的不同[5-7]。以上研究均是關于陣面變形對雷達電性能的影響分析,未涉及對其進行補償。
針對安裝在機翼的蒙皮天線式相控陣雷達,文中提出一種基于分布式IMU的相控陣雷達運動補償方法,在機翼上安裝多個IMU,通過主節點、子節點間(與主慣導、子慣導含義相同)的相對導航解算和多節點信息融合監測機翼變形,進一步計算出陣面變形所引起的各個陣元的相位誤差,并完成相位補償,最終實現降低相控陣雷達的增益損失。
1 陣面變形對雷達電性能的影響
機翼上安裝的相控陣雷達變形誤差主要來自于初始隨機安裝誤差和飛行中的機翼撓曲變形。矩形柵格相控陣陣元排列如圖1所示,假設陣面共有M×N個陣元,沿x軸方向的陣元間距為dx,沿y軸方向的陣元間距為dy。根據遠區觀察方向與坐標系Oxyz的空間幾何關系(見圖2),假設目標所在方位(θ,φ)的方向余弦為(cosαx,cosαy,cosαz),則目標方向與坐標軸間的夾角和方向余弦的關系為[8]:
(1)
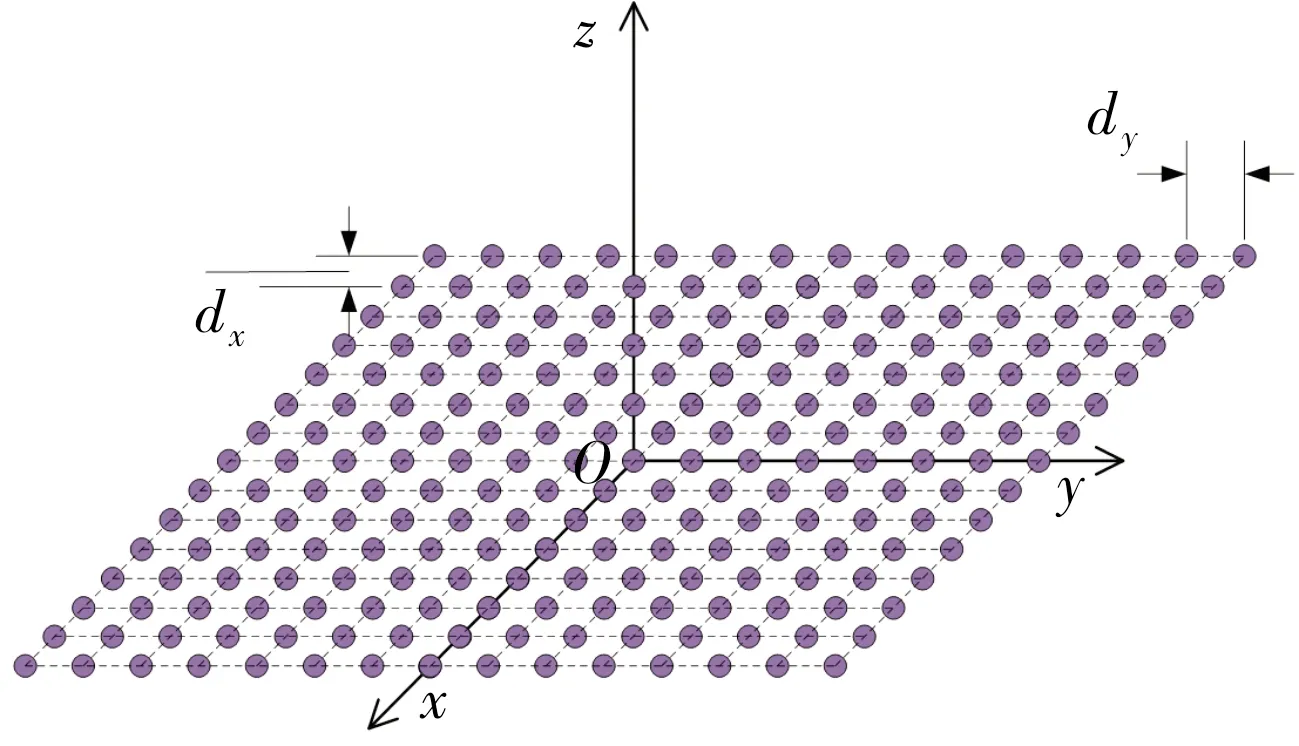
圖1 矩形柵格排列陣的陣元排列示意圖
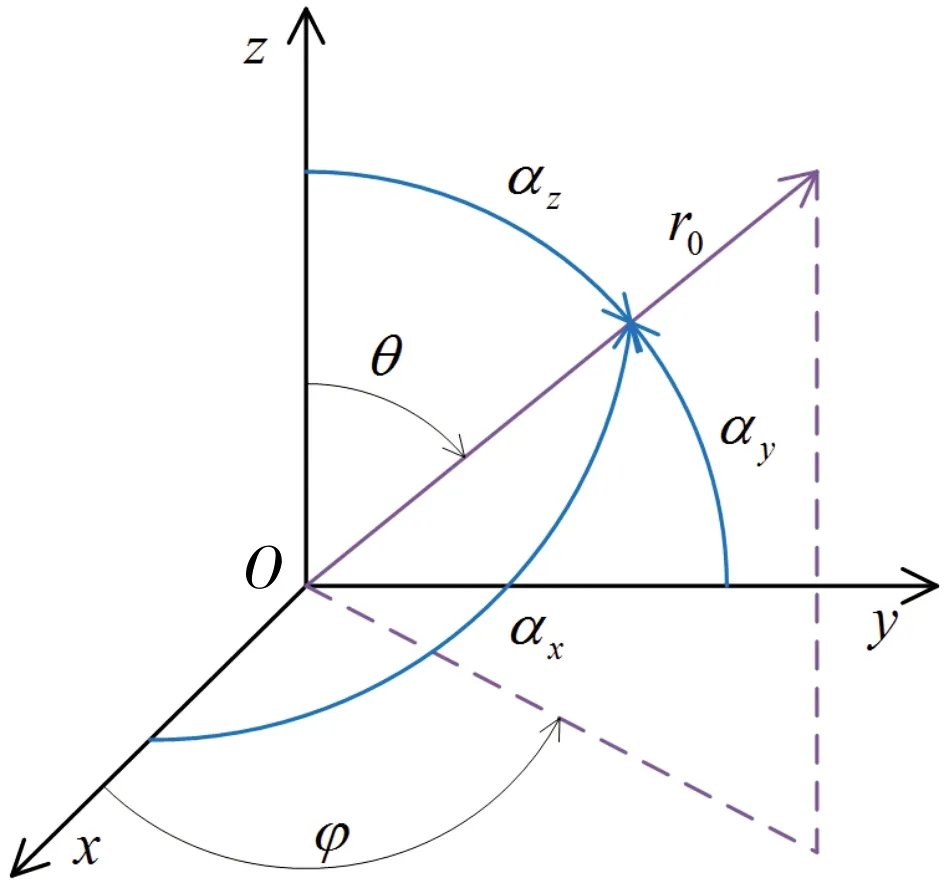
圖2 目標的空間幾何關系
假設第(m,n)陣元(0≤m≤M-1,0≤n≤N-1)的位置偏移量為(Δxm,n,Δym,n,Δzm,n),指向偏轉為(Δθ,Δφ),則該陣元相對第(0,0)陣元的相位差為[6]:
(2)

此時矩形柵格平面有源相控陣天線的方向圖函數為[9]:
(3)
式中:fe(θ,φ)為半波振子作為輻射單元時的方向圖函數。
將增益損失定義為[10]:
(4)
式中:f(θ,φ)為無誤差時的方向圖函數;fδ(θ,φ)為有誤差時的方向圖函數。
在現有的研究中,薄板仍是最接近實際機翼撓曲的理論模型,機翼撓曲主要考慮z軸方向的位移,機翼撓曲的平衡方程為[11]:
(5)
式中:q為機翼上的載荷;D為機翼彈性系統;LT為機翼長度;x為機翼橫軸坐標值;s為對應的z軸撓曲位移。將任意子節點相對位置x,s代入后,就可以計算出q/(24D),因此每個主、子節點通過相對導航解算可獲得一個機翼撓曲模型。
為分析不同撓曲程度下的影響,如圖3所示,定義β為撓曲指數,反映機翼的撓曲程度。主節點在機翼根部,子節點n在機翼翼尖處。
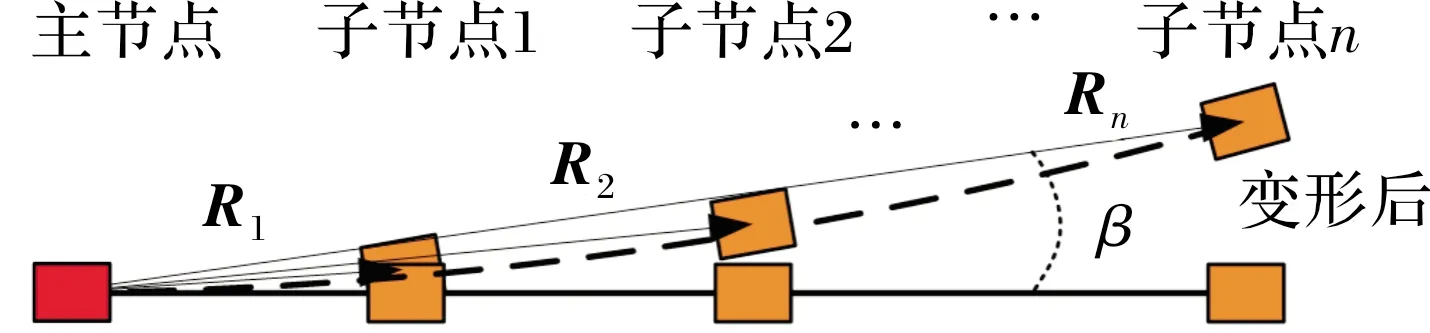
圖3 機翼撓曲形狀
考慮撓曲變形和位置隨機誤差的共同影響,進行仿真分析,仿真10 GHz波段相控陣雷達,圖4為不同撓曲指數和不同位置隨機誤差下帶來的天線增益損失圖,圖中λ為波長,可以看出,增益損失遠超出雷達性能所要求的0.5 dB[6],不符合相控陣雷達電性能的需求,因此需要對其進行補償。

圖4 機翼撓曲變形和誤差下的增益損失圖
2 基于分布式IMU的陣面變形補償算法
精確的導航信息是滿足現代載機高動態下任務設備空域穩定應用需求的關鍵所在[12]。在高動態應用場景中,當任務設備所在位置存在撓曲變形時,對任務設備的空域穩定存在較大的技術挑戰[13]。其與傳統導航應用需求的主要差異在于對短期姿態、姿態變化率、位置、位置變化率、速度的更新頻率及精度等均有更高的要求。最有效的方法是通過傳感器對任務設備的安裝位置進行直接的運動測量,以量化導航信息的微小變化部分。雷達陣面的補償對位置精度要求在cm級甚至是mm級。由于雷達陣面與機載主慣導間存在桿臂效應、安裝誤差、信號傳輸延時等誤差因素,因此傳統的主、子慣導間傳遞對準方法顯然不能滿足雷達運動補償的使用要求[14]。通過分析,雷達陣面補償本質上是一個對相對運動進行補償的過程,只需要獲得各個節點間位置的動態變化,便可以通過相對位置進行相位補償[15-16]。因此,選用主節點為參考坐標系,首先進行主、子慣導間的相對導航解算[17],獲得各個子節點相對于主節點的運動參數;其次通過多節點信息關聯,獲得實時的機翼結構形狀;最后對機翼結構的方程進行積分,得到每個陣元的實時位置。
2.1 主、子慣導相對導航算法
主、子慣導間的相對姿態微分方程、相對速度微分方程、相對位置微分方程為[18]:
(6)
相對導航解算屬于遞推解算方法,在初始安裝誤差和慣性元器件誤差等各種誤差源的影響下,相對導航解算結果會出現累積誤差。因此,需采用閉環反饋校正機制來對誤差進行修正。這里以相對慣性導航誤差模型為基礎來建立卡爾曼濾波器的狀態方程,考慮到陀螺儀漂移和加速度計零偏后,狀態變量X為:

(7)
狀態方程可寫為:

(8)
式中,A,B,W的具體描述見文獻[18]。
相對慣性導航的解算過程沒有任何外界參考信息,因而給量測值的選擇帶來一定困難。考慮到機翼形狀的約束,以相對撓曲誤差為量測向量。量測方程為:
y=HX+v
(9)
式中:v為量測噪聲。
量測矩陣H為:
H=[03×9I3×303×6]
(10)
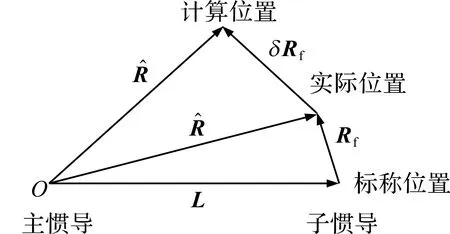
圖5 相對撓曲誤差幾何示意圖

(11)
因此,通過式(11)可獲得δRf的量測值,進而利用卡爾曼濾波基本原理,對狀態變量進行最優估計。
在實際應用中,將撓曲分為高頻撓曲和低頻撓曲。對于高頻撓曲,可以使用一階滯后濾波等方法進行抑制[14]:
mn=(1-a)·mn-1+a·kn
(12)
式中:mn為本次濾波結果;mn-1為上次濾波結果,kn為本次采樣值;權值a根據實際要求進行選擇,取值范圍為0~1。
對于低頻撓曲,可以利用主、子節點間的相對姿態與相對位置的關系進行估計[14]:
(13)
式中:μf為撓曲變形角,由相對姿態解算所得。
2.2 多節點信息融合
由式(5)可知,每個主、子慣導均可以計算出一個機翼撓曲模型,機翼上安裝有多個子慣導,因此可以進行多節點關聯。聯邦卡爾曼濾波已廣泛應用于多傳感器融合領域,具有精度高、配置靈活、計算量低和容錯性好等優點[19-20],因此這里選用聯邦卡爾曼濾波作為融合算法,將狀態變量X進行擴展[21]:
(14)

3 仿真結果
3.1 分布式IMU仿真
為驗證相對導航算法的有效性,設計了飛行仿真軌跡,共計720 s,初始時北向速度為200 m/s,2 min內爬升5 700 m,然后勻速飛行0.5 min,接著6 min內航向轉過360°,再勻速飛行0.5 min,最后2 min內俯沖下降5 700 m。主慣導由軌跡發生器得到,再疊加上撓曲變形角和撓曲位移得到子慣導的數據,以m為單位,主慣導位置為[0,0,0]T,子慣導共10個,安裝于[1,0.5,0]T、[2,0.5,0]T、[3,0.5,0]T、[4,0.5,0]T、[5,0.5,0]T、[1,-0.5,0]T、[2,-0.5,0]T、[3,-0.5,0]T、[4,-0.5,0]T、[5,-0.5.0]T,主節點、子節點IMU噪聲參數見表1~表2。考慮到機翼結構,這里只考慮縱向撓曲,撓曲位移跟飛行時間的關系用正弦函數來模擬,最大撓曲指數設置為5°[17]。

表1 陀螺儀參數

表2 加速度計參數
主節點與子節點n相對位置解算結果見圖6,相對位置解算誤差結果見圖7。并由表3可知,經過多節點信息融合后的撓曲位移誤差非常小,翼尖處的z軸方向撓曲位移僅為4.447 7 mm。
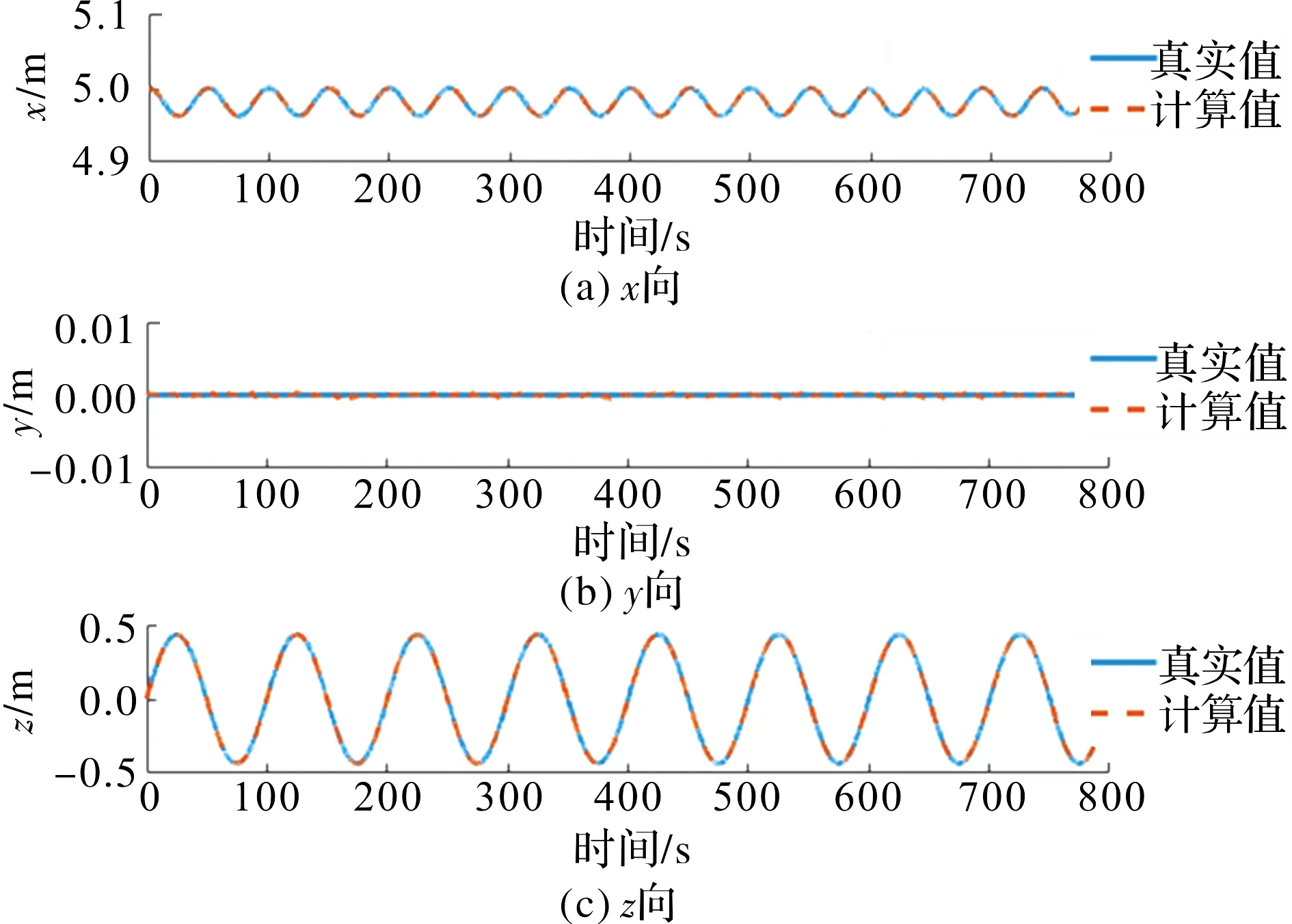
圖6 主、子慣導相對位置解算圖
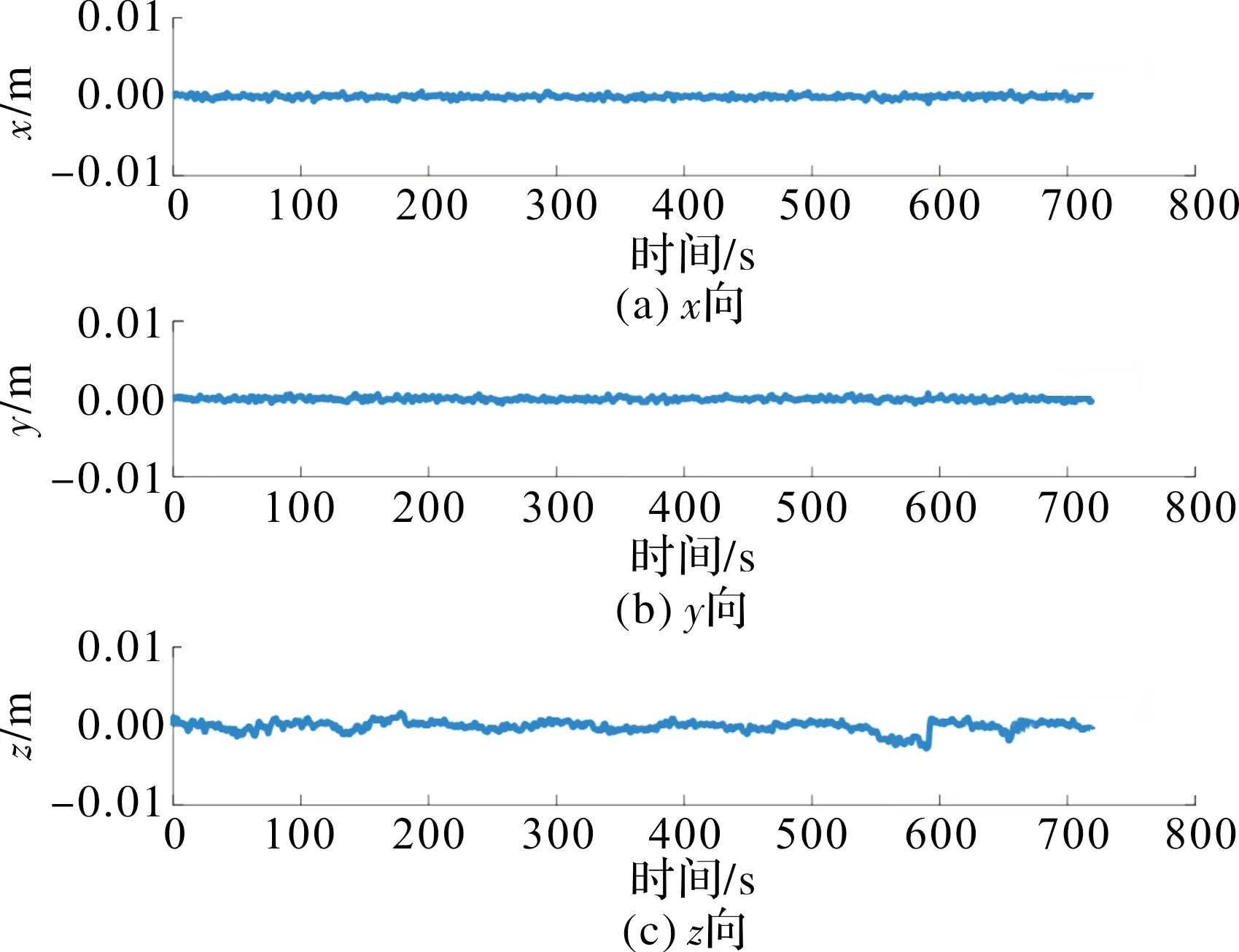
圖7 主、子慣導相對位置解算誤差圖
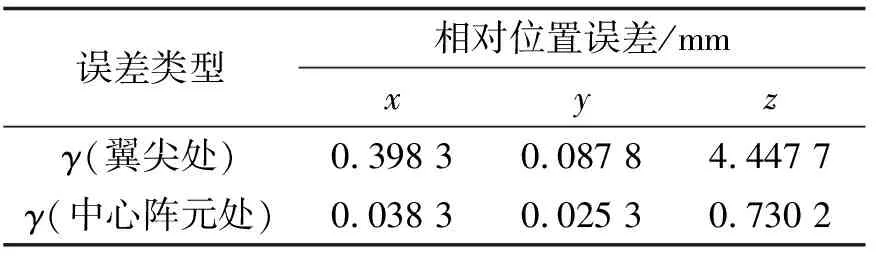
表3 相對導航解算RMSE
3.2 雷達電性能補償仿真
仿真10 GHz波段相控陣雷達,陣元為9行33列矩形排列,其中天線的中心陣元(0,0)即第5行第17列陣元安裝在機翼上[2,0,0]T,單位m,陣元間距為兩倍波長,撓曲時相控陣雷達陣列排列圖見圖8。
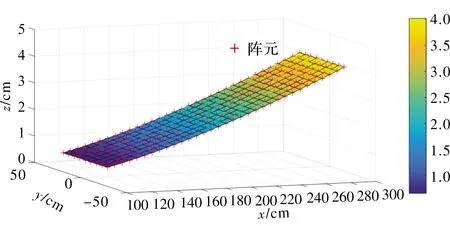
圖8 機翼撓曲下的相控陣雷達陣列圖
經過多節點信息融合,可以實時計算出一條機翼形狀,再對機翼模型的方程進行積分,可以解得每個相控陣陣元的實時位置,進一步對相控陣雷達的相位誤差進行實時補償。補償前后雷達天線增益損失結果見圖9,可以得出,經過補償后,不同撓曲指數下增益損失均在0.2 dB以下,可以滿足雷達電性能的需求。為更好的體現所提方法的性能,在撓曲指數為5°時,對補償前后雷達方向圖進行對比,見圖10,可以看出補償后的波束信號功率強,且波束指向精度大幅提高。
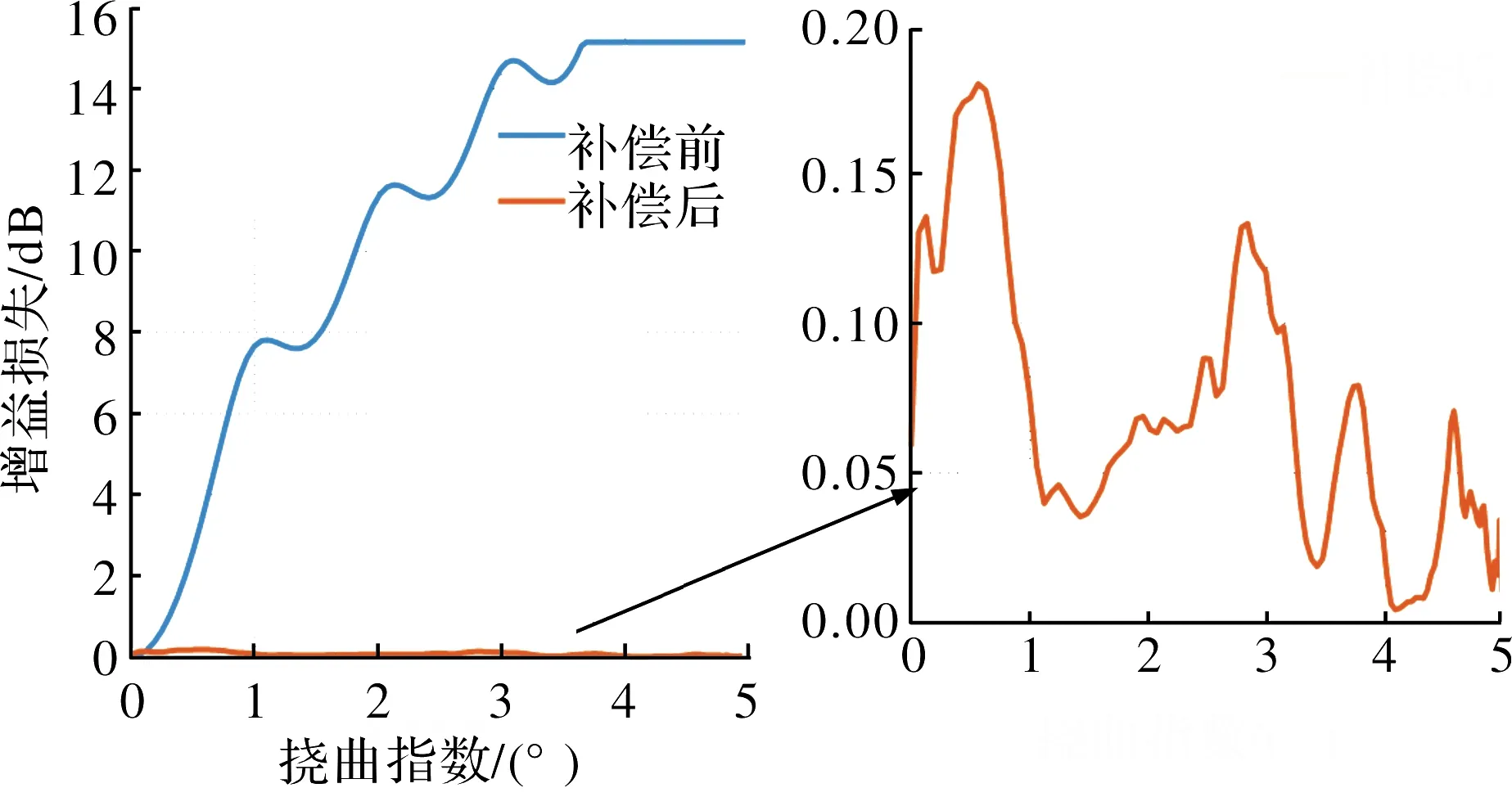
圖9 增益損失補償前后對比圖(最大撓曲指數5°)
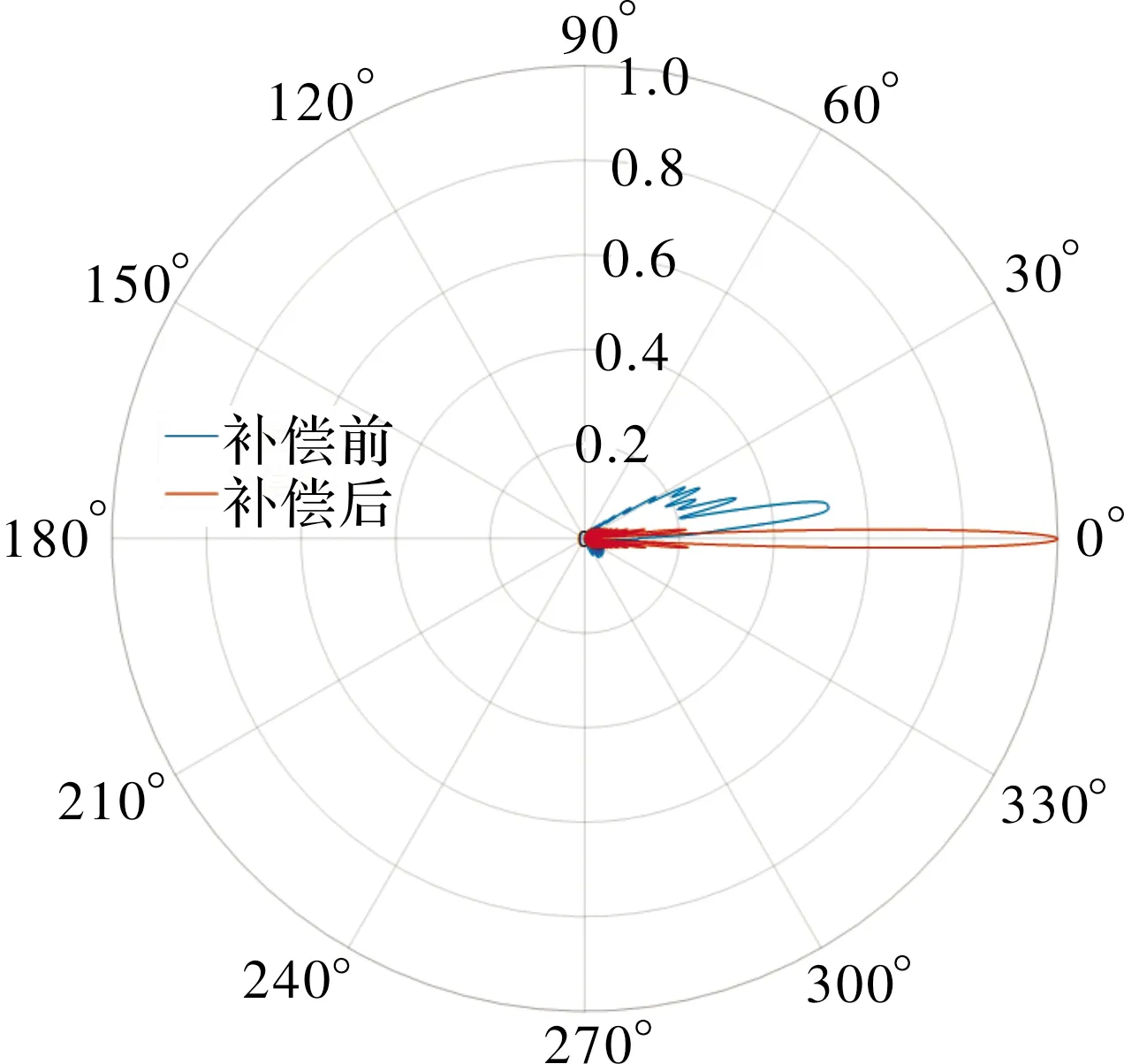
圖10 撓曲指數5°時的方向圖對比
4 結論
提出一種基于分布式IMU的相控陣雷達陣元相位誤差補償方法,通過主、子節點間的相對導航解算以及多節點信息融合的技術途徑實時重建陣面結構,實現對每個陣元的相位誤差補償,從而降低了天線增益損失。實驗結果表明,所提的技術方案對相控陣雷達進行實時運動補償后,天線增益損失在0.2 dB以下,波束指向精度明顯得到提高,這對相控陣雷達運動補償具有重要的借鑒意義。在未來的工作中,還需深入探究相控陣雷達各陣元相位中心的相位誤差與慣導誤差之間的對應關系,以及如何通過分布式IMU進一步提升各陣元相位中心之間的相對關系,從而為改善相控陣雷達運動補償系統的設計提供有價值的指導。
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36