聯合機載激光測深波形和點云的水陸識別方法研究
2022-04-01 02:44:35王曉陽周豐年趙興磊李西燦
人民長江 2022年1期
關鍵詞:特征
王曉陽 周豐年 趙興磊 李西燦

摘要:水陸識別在河口海岸帶水陸資源管理和科學研究中具有重要作用。利用機載激光測深(Airborne LiDAR bathymetry,ALB)回波波形和點云信息可實現水陸交界區域高精度和高分辨率水陸識別。但在復雜海陸環境區域,采用ALB波形特征或三維點云高程特征的傳統識別方法具有各自不足。針對復雜海陸環境區域高精度水陸識別問題,提出了聯合ALB波形和三維點云特征的水陸識別方法。首先,利用紅外激光獲取的三維點云高程,基于K-means聚類方法進行海陸識別。然后,利用紅外和綠激光波形信息識別陸地中的內陸水域。將該方法應用于實際Optech CZMIL水陸識別。結果表明:相比傳統點云聚類和波形聚類水陸識別方法,該方法將ALB水陸識別精度提高了3.6%~5.5%。
關 鍵 詞:水陸識別; 機載激光測深; 紅外激光; 綠激光; 海洋測繪
中圖法分類號: P715 ? 文獻標志碼: A
DOI:10.16232/j.cnki.1001-4179.2022.01.020
0 引 言
機載激光測深(Airborne LiDAR Bathymetry,ALB)是一種高分辨率、高效率、靈活安全的淺水測量方法[1]。單頻ALB系統采用波長為532 nm的綠激光探測水面和水底。雙頻ALB采用波長為532 nm的綠激光探測水底,波長為1 064 nm的紅外激光探測水面[2]。借助ALB回波波形或測量偏差,ALB還可用于水體懸沙濃度反演[3]。ALB可實現水陸一體化測量,接收陸地和水體的激光回波波形信息。由于水體/陸地光學特性不同,ALB所接收的陸地和海洋激光脈沖回波的波形特征也不相同[3-4]。反之,利用海洋和陸地波形的不同特征,可實現基于ALB的水陸識別。
目前,由ALB獲得的紅外激光、紅激光和綠激光波形特征以及三維點云高程已成為水陸識別的有效特征。Guenther[5],Pe′eri[6]等根據陸地波形振幅的飽和特性給出了水陸識別的紅外激光波形飽和法。Collin等[7]采用該方法有效實現了水陸識別。但海上的浪花、鳥類和海水中夾雜的氣泡也會導致紅外激光波形振幅飽和,從而引起誤識別。并且隨著波形數字化儀的發展,ALB可記錄激光回波的全波形數據,波形振幅不再飽和[6]。因此,該方法的適用性較差。
基于拉曼散射原理,部分ALB系統通過增加紅激光接收通道并記錄紅激光波形實現水陸識別[8-11]。Pe′eri等[6]總結了基于ALB波形特征的水陸識別方法,包括紅外激光波形飽和法、綠-紅-紅外激光(Green-Red-IR)波形振幅比算法和紅-紅外激光(Red-IR)波形振幅比算法。其中,Green-Red-IR和Red-IR振幅比算法是紅外激光波形飽和法的擴展,均需要紅激光波形數據。然而,除了Optech SHOALS系列,其他主流ALB系統,例如Optech Coastal Zone Mapping and Imaging LiDAR(CZMIL),AHAB HawkEye III,RIEGL VQ-880-G和Fugro LADS-MK3等,均沒有紅激光接收通道[11-12]。
由于陸地表面對紅外激光的強反射和水體表面對紅外激光的強吸收作用,通常情況下,紅外激光的陸地回波振幅顯著大于海洋回波振幅[13]。典型的綠激光陸地回波包含陸地表面回波,而綠激光海洋波形包含海洋表面回波、海水后向散射回波以及海底回波[1]。因此,紅外激光和綠激光的陸地和海洋回波波形特征通常具有顯著差異。曹彬才等[14]從原始激光波形中提取波形特征,利用支持向量機建立分類模型進行水陸識別。胡善江等[15]提出了基于深度學習的ALB水陸波形分類方法。借助ALB波形特征構建分類模型能有效實現水陸識別,但支持向量機和深度學習方法需要借助樣本數據訓練分類模型。此外,由于激光脈沖與環境之間相互作用的復雜性,并不是每一個海洋/陸地回波均具有典型的海洋/陸地波形特征。現實中往往出現某些海洋回波特征接近典型陸地回波特征或某些陸地回波特征接近典型海洋回波特征的情況。以上特殊波形情況會引起海洋和陸地誤識別問題,降低了基于波形特征的水陸識別精度。
水面和陸地點高程具有顯著差異,利用ALB三維點云數據也可實現水陸識別。趙興磊等[13]基于水陸點高程差異,利用ALB三維點云實現水陸快速識別。該方法避免了基于波形特征水陸識別方法中特殊波形的誤識別問題,但內陸水面和海面高程不同,該方法不能有效識別內陸水域。
綜上所述,基于水體/陸地光學特性差異,ALB波形特征可用于水陸識別。但海上的浪花、鳥類和海水中夾雜的氣泡會引起激光的強反射,導致某些紅外激光海洋波形特征接近典型陸地波形特征。陸地地形因素也會導致某些陸地激光波形特征接近典型水體波形特征。在極淺水域,綠激光海面回波、海水后向散射回波以及海底回波的疊加性則會導致極淺水域的綠激光海洋波形特征接近典型陸地波形特征。由于存在以上三類特殊波形,基于波形特征的水陸識別方法會出現某些波形的誤識別問題,降低了水陸識別精度。基于ALB三維點云高程的水陸識別方法可以避免波形識別方法中特殊波形引起的誤識別問題,但不能識別內陸水域。為此,本文提出了一種聯合ALB點云和波形特征的水陸識別方法,以此提高水陸識別精度。
1 研究方法
本文結合ALB波形特征和三維點云特征的優點,提出一種聯合ALB點云和波形特征的水陸識別方法。首先,利用ALB三維點云高程通過K-means聚類識別海洋和陸地。然后,利用紅外和綠激光波形特征,通過K-means聚類進一步識別內陸水域。最終實現復雜海陸環境下海洋、陸地和內陸水域的有效識別。
1.1 基于ALB點云的海陸聚類識別
與陸地點高程相比,海面點高程在圍繞平均海平面的區間內變化。海面點和陸地點的高程值在不同閾值區間內。將ALB三維點云高程作為特征,采用非監督聚類方法,可在無樣本數據的條件下,實現海陸聚類識別。K-means聚類算法計算速度較快,通常被作為大樣本聚類分析的首選算法[16-17]。設n個數據X={x1,x2,…,xi,…,xn},在聚類開始前,需要指定聚類個數k,本文中k設置為2,即水體和陸地。K-means聚類算法的基本實現過程如下:
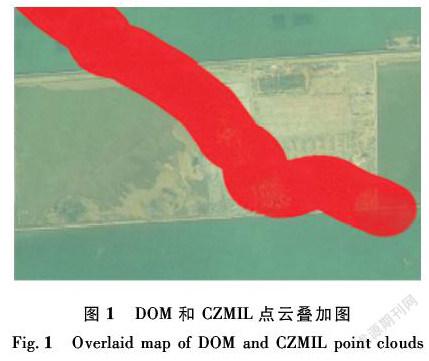
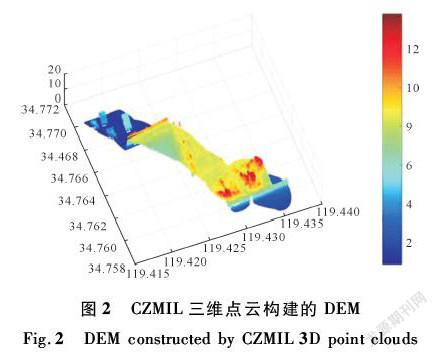
圖1為試驗區域位置圖,其背景圖為由GF1衛星2014年12月24日觀測數據獲得的分辨率為2 m的數字正射影像圖(DOM)。覆蓋在DOM上的303 256個紅色點是CZMIL測量獲得的三維點云。圖2給出了由CZMIL三維點云數據構建的研究區域數字高程模型(DEM),顏色表示0.85~13.8 m的點云高程變化。研究區域范圍內,從CZMIL采集的原始數據中提取了303 256個綠激光波形和303 256個紅外激光波形。
3 結果分析
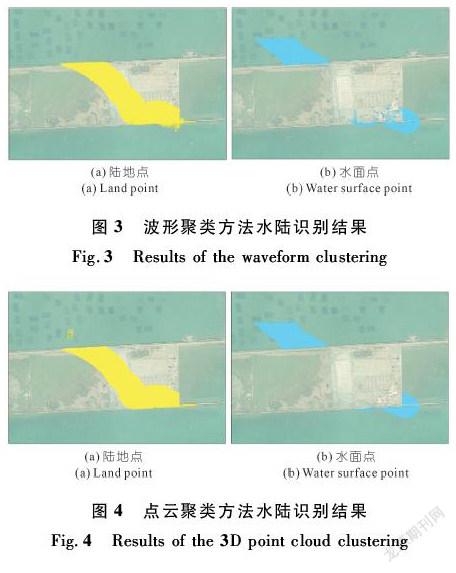
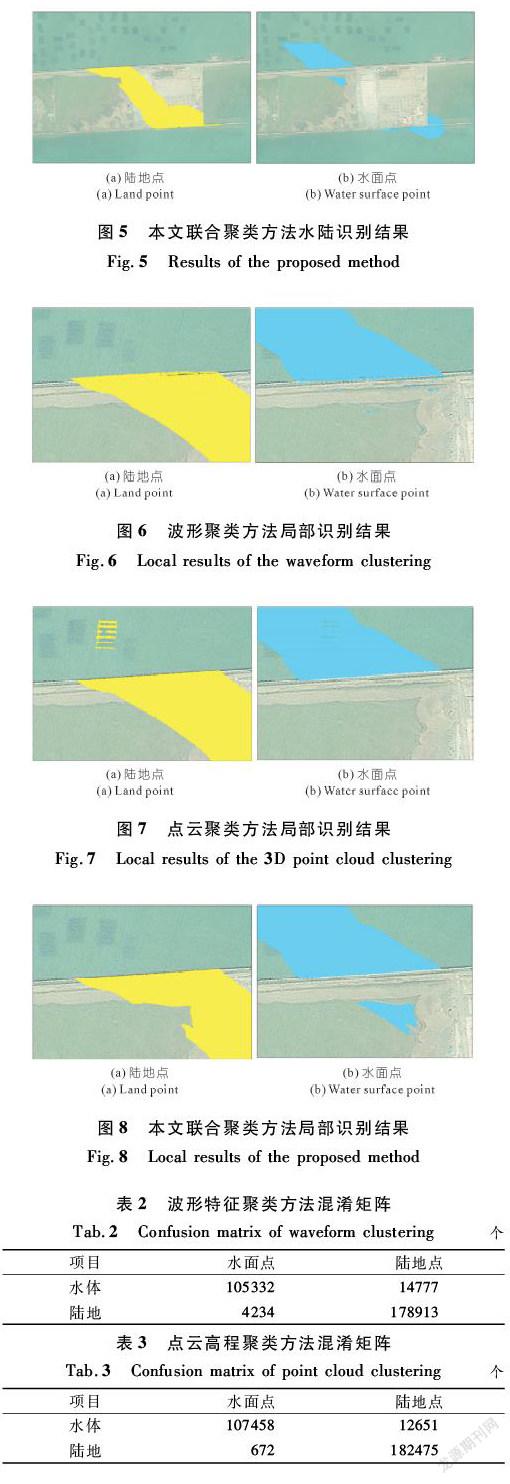
圖3~5分別給出了波形聚類法,點云聚類法和本文聯合聚類法確定的試驗區域內水體(包括海洋和內陸水域)和陸地。圖6~8分別給出了不同水陸識別方法在水陸邊界的局部識別結果。黃色和藍色點分別表示水陸識別確定的陸地和水體。可以發現,由于極淺水域綠激光波形的疊加性,采用綠激光波形振幅特征的波形聚類方法無法有效識別內陸極淺水域。同時,由于其他特殊波形的存在,水體和陸地中存在大量誤識別點。點云聚類方法雖然誤識別點相對較少,但無法識別內陸水域。本文聯合聚類方法采用點云高程聚類減少了特殊波形引起的誤識別,采用紅外和綠激光波形特征聚類有效識別了內陸水域。
以DOM中人工提取的水陸邊界作為參考,評估本文方法相比傳統基于波形特征或點云高程的水陸識別方法的有效性。基于不同水陸識別方法獲得的水陸點以及DOM提取的參考邊界給出混淆矩陣,如表2~4所列。列標簽為參考邊界給出的水陸屬性,行標簽為水陸識別獲得的水面和陸地點。然后基于混淆矩陣計算相應識別方法的總體精度。波形聚類法,點云聚類法和本文聯合聚類法水陸識別總體精度分別為93.7%,95.6%和99.2%。試驗結果表明本文聯合聚類方法水陸識別精度最高。
4 結 論
為提高復雜水陸環境區域基于ALB的水陸識別精度,本文提出了一種聯合ALB點云和波形特征的水陸識別方法。該方法基于點云高程特征識別海洋和陸地,基于激光波形信息識別內陸水域,結合了點云高程特征可避免海洋中特殊波形的誤識別問題以及波形特征有效識別內陸水域的優勢,且不需要樣本數據。實驗結果表明,相比傳統基于ALB點云或波形特征的水陸識別方法,本文聯合ALB點云和波形特征的方法具有更高的水陸識別精度。本文方法需要借助紅外激光波形信息,適用于雙頻ALB系統。今后有必要繼續開展基于單頻ALB系統的高精度水陸識別方法研究。
參考文獻:
[1] GUENTHER G C,CUNNINGHAM A G,LAROCQUE P E,et al.Meeting the accuracy challenge in airborne LiDAR bathymetry[C]∥Proc.edrsel Symp. Workshop on LiDAR Remote Sensing Sensing of Land & Sea,2000(1):1-27.
[2] 趙興磊.機載激光高精度測深與水體含沙量反演研究[D].武漢:武漢大學,2018.
[3] ZHAO X,ZHAO J,ZHANG H,et al.Remote sensing of sub-surface suspended sediment concentration by using the range bias of green surface point of airborne lidar bathymetry[J].Remote Sensing,2018,10(5):681.
[4] HUANG T,TAO B,HE Y,et al.Utilization of multi-channel ocean LiDAR data to classify the types of waveform[C]∥Remote Sensing of the Ocean,Sea Ice,Coastal Waters,and Large Water Regions 2017.International Society for Optics and Photonics,2017:10422.
[5] GUENTHER G C.Airborne Laser Hydrography:System Design and Performance Factors[D].Maryland:NOAA,1985.
[6] PE’ERI S,MORGAN L V,PHILPOT W.D,et al.Land-Water Interface Resolved from Airborne LIDAR Bathymetry(ALB)Waveforms[J].Journal of Coastal Research,2011,62:75-85.
[7] COLLIN A,LONG B,ARCHAMBAULT P.Merging land-marine realms:Spatial patterns of seamless coastal habitats using a multispectral LiDAR[J].Remote Sensing of Environment,2012,123:390-399.
[8] GUENTHER G C,LAROCQUE P E,LILLYCROP W J.Multiple surface channels in Scanning Hydrographic Operational Airborne Lidar Survey(SHOALS)airborne lidar[C]∥Ocean Optics XII.International Society for Optics and Photonics,1994.
[9] ALLOUIS T,BAILLY J S,PASTOL Y,et al.Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman,near‐infrared and green signals[J].The Journal of the British Geomorphological Research Group,2010,35(6):640-650.
[10] PE′ERI S,PHILPOT W.Increasing the existence of very shallow-water LIDAR measurements using the red-channel waveforms[J].IEEE Transactions on Geoscience and Remote Sensing,2007,45(5):1217-1223.
[11] FUCHS E,TUELL G.Conceptual Design of the CZMIL Data Acquisition System(DAS):Integrating a New Bathymetric Lidar with a Commercial Spectrometer and Metric Camera for Coastal Mapping Applications[C]∥Proceedings of SPIE-The International Society for Optical Engineering,2010 International Society for Optics and Photonics,2010:7695.
[12] CHUST G,GRANDE M,GALPARSORO I,et al.Capabilities of the bathymetric Hawk Eye LiDAR for coastal habitat mapping:A case study within a Basque estuary[J].Estuarine,Coastal and Shelf Science,2010,89(3):200-213.
[13] ZHAO X,WANG X,ZHAO J,et al.Water-land classification using three-dimensional point cloud data of airborne LiDAR bathymetry based on elevation threshold intervals[J].Journal of Applied Remote Sensing,2019,13(3):034511.
[14] 曹彬才,朱述龍,邱振戈,等.利用回波波形特征實現激光雷達的水陸分離[J].海洋測繪,2018,38(3):12-16.
[15] 胡善江,賀巖,陶邦一,等.基于深度學習的機載激光海洋測深海陸波形分類[J].紅外與激光工程,2019,48(11):1113004.
[16] ABDEYAZDAN M.Data clustering based on hybrid K-harmonic means and modifier imperialist competitive algorithm[J].The Journal of Supercomputing,2014,68(2):574-598.
[17] KANUNGO T,MOUNT D M,NETANYAHU N S,et al.A local search approximation algorithm for k-means clustering[J].Computational Geometry,2002,28(2-3):89-112.
[18] ABDI H,WILLIAMS L J.Principal component analysis[J].Wiley Interdisciplinary Reviews Computational Statistics,2010,2(4):433-459.
(編輯:劉 媛)
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38