大面陣探測器與斯特林制冷機熱耦合結構仿真設計與實驗
2022-03-30 07:11:10何嘉華朱建炳莊昌佩于錕錕許國太
真空與低溫 2022年2期
關鍵詞:結構
何嘉華,朱建炳,莊昌佩,于錕錕,許國太
(蘭州空間技術物理研究所 真空技術與物理重點實驗室,蘭州 730000)
0 引言
空間紅外遙感對空間分辨率和探測精度提出了越來越高的要求,采用大規模及超大規模紅外探測器成為紅外遙感技術發展的必然趨勢[1-3]。低溫制冷機作為空間紅外遙感系統中的關鍵單機[4-5],以往SADA標準接口的典型制冷機冷指杜瓦熱耦合結構已無法滿足大面陣紅外探測器的冷卻需求,必須通過適當的熱耦合結構,將制冷機的冷量高效可靠地傳遞到紅外探測器冷平臺上[6]。黃燕等[7]設計了一種經典的大面陣多點冷卻結構,并對該結構的熱、力學性能進行了仿真分析與實驗驗證,最終將冷量從單點冷源導出至大面陣冷平臺;鄧蔚等[8]對各類柔性冷鏈進行了對比分析,從熱學性能及力學性能出發,總結了各類柔性冷鏈設計的特點及適用性;范廣宇等[9]對超長線陣列紅外焦平面杜瓦結構進行了設計,采用多條并聯式柔性導熱帶,將熱耦合至超長線陣列冷平臺,改善了傳熱和冷平臺溫度均勻性。以上結構中均采用銅絲帶、碳纖維管以及銅箔等材料制作的柔性導熱帶,通過螺接方式將冷量傳導至冷平臺,為大面陣/超長線陣列紅外探測器熱耦合技術發展提供了重要參考。然而,考慮到零部件加工誤差及裝配誤差,柔性導熱帶與冷指之間很容易產生變形不協調或側向力,進而增加制冷機冷指焊縫處的工作應力,甚至導致制冷機的損壞。尤其對斯特林制冷機而言,必須進行細致、深入的匹配性分析,才能使得其內部運行間隙在受到側向力后仍處于最佳范圍,這無疑給柔性導熱帶的設計帶來了困難。此外,傳統結構冷平臺采用薄壁金屬筒作為支撐結構,在其漏熱和結構穩定性之間往往難以選擇。本文提出一種用彈性導熱墊將低溫制冷機與紅外探測器組件進行熱耦合的新方案,與傳統柔性導熱帶方案相比,在新方案中,冷指不與其他結構件剛性連接,損壞的風險降低。文章對熱耦合效率進行分析計算,同時對非金屬絕熱支撐結構的漏熱、冷平臺溫度的均勻性和耦合結構的力學穩定性進行分析與驗證[10-11]。
1 冷平臺耦合結構設計
圖1為斯特林制冷機與紅外探測器冷平臺耦合結構示意圖,該耦合結構采用鉬銅合金作為冷平臺,底板上方為銅質均熱板,可以有效提高冷量沿探測器底板方向的傳輸效率,4個非金屬絕熱支撐柱連接在安裝法蘭與探測器底板之間,作為力學支撐[12]。導熱板設計為螺接跨越式的銅質導熱橋板結構,在橋面中央設置圓形凹槽,外徑略大于冷指尺寸,由于這種凹槽耦合結構為開放性空間結構,如果采用導熱硅脂可能出現爬移導致污染紅外相機光學鏡頭,且支撐結構與冷指材料不同,低溫變形不同,因此必須采用具有一定彈性的高熱導率導熱墊實現制冷機冷頭與冷平臺間熱耦合,即滿足高效熱耦合的要求,又利用彈性材料的回彈特性減輕降溫過程中的冷縮現象對探測器的影響。
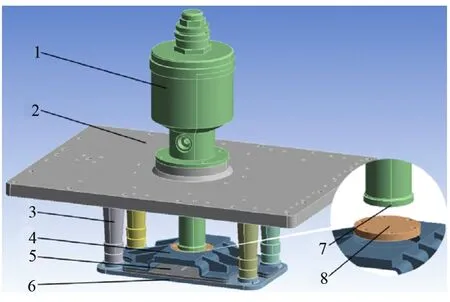
圖1 斯特林制冷機與紅外探測器冷平臺耦合結構圖Fig.1 Coupling structure of Stirling refrigerator and infrared detector cold platform
高熱導率導熱墊選用直徑8 μm不銹鋼絲綿,將適量的不銹鋼絲綿揉搓成團,使用鼓風機將其吹成亂序狀,利用模具壓制成扁圓柱狀彈性墊,底面積的大小要確保可以填充進導熱橋板圓形凹槽中,在自然狀態下高度略大于凹槽深度。在安裝過程中,冷指端面將彈性體壓入凹槽,并預留一定的彈性。通過計算,冷頭在75 K時回縮量為0.04 mm,確保彈性墊在大于0.04 mm的伸長范圍內具有回彈性能,可認為彈性墊與導熱橋板、冷頭全過程充分接觸,接觸熱阻基本不變[13]。
當低溫制冷機工作時,冷量由冷指端面經過導熱橋板凹槽處分別傳遞到橋板底座位置,均熱板再將底座位置的冷量傳遞到冷平臺,實現兩級均勻化導出,最終使得冷平臺溫度均勻性符合要求。耦合結構凹槽處填充的彈性墊具備一定柔性和彈性,防止剛性接觸造成的制冷機冷指損壞。均熱板上下端面分別與導熱橋板、冷平臺通過螺接緊密接觸,三者接觸面之間鋪設銦箔并控制預緊力使接觸熱阻最小化。整個耦合結構通過4個環氧玻璃鋼支撐柱剛性連接在安裝法蘭上,這樣既可以降低安裝法蘭與探測器冷平臺之間的熱傳導系數,還可以確保冷平臺結構的穩定性,滿足力學環境實驗的要求。本文通過建立冷指與冷平臺耦合結構熱分析模型,重點對彈性墊的選擇、支撐柱的絕熱設計以及冷平臺溫度均勻性進行分析和驗證。
2 理論分析與仿真
某大面陣紅外探測器對低溫制冷機提出以下要求:在尺寸為140 mm×70 mm的鉬銅合金冷平臺上,溫度均勻性≤0.5 K,最大熱負載3.5 W@80 K。
根據能量守恒定律:

式中:Q為制冷機制冷量;Qg為探測器底板需求冷量,為3.5 W;Qr為耦合結構整體輻射漏熱,考慮表面加工質量及多層絕熱包覆,給定該項熱損失為1.2 W[9-10];Qcv為結構對流漏熱,由于制冷機在高真空環境中工作,可認為杜瓦中對流漏熱Qcv=0;Qcd為絕熱支撐的傳導漏熱。
絕熱支撐柱設計為輕質錐形筒結構,主體材料采用高強度環氧玻璃鋼。假設其導熱系數與溫度為線性關系。將絕熱支撐柱兩端溫度設為初始條件,利用Workbench軟件仿真得到支撐柱在該條件下的熱流密度,結果如圖2所示。支撐柱的平均熱流密度為4.425 4×10-5W/mm2,單根支撐柱的冷損小于0.08 W,4根支撐柱總傳導漏熱Qcd=0.32 W。

圖2 絕熱支撐柱熱仿真云圖Fig.2 Cloud simulation of adiabatic support column
綜上所述,耦合結構整體所需冷量Q≥5.02 W,因此選取制冷量為5.5 W@80 K(130 W)的斯特林制冷機作為冷源,其冷指直徑為22 mm。該制冷機在70~80 K溫度區間內,輸出冷量與冷指端面溫度呈線性關系,即冷指端面溫度每降低1 K,冷量降低約0.12 W,表1為相關材料在所處溫度下的導熱系數[14]。

表1 材料導熱系數Tab.1 Material thermal conductivity
2.1 彈性墊設計及分析
將彈性墊視為多孔介質,采用有效介質理論計算其有效導熱系數[15]:

式中:由于彈性墊處于真空環境中,因此采用麥克斯韋-歐肯模型:km=ks,彈性體計算模型;ka為空氣導熱系數,由于環境為真空,ka=0;ke為彈性墊等效導熱系數;km為模型假定導熱系數;ks為不銹鋼固體導熱系數;ε為彈性墊孔隙率,可用式(3)表示:

圖3為不同孔隙率對應的彈性墊的有效導熱系數。孔隙率越小,有效導熱系數越大,彈性墊的回彈能力越好,與導熱橋板、制冷機冷頭接觸熱阻也越小;同時應考慮材料壓縮不應超過屈服極限。此外,還需考慮制冷機冷指的縱向許用應力。
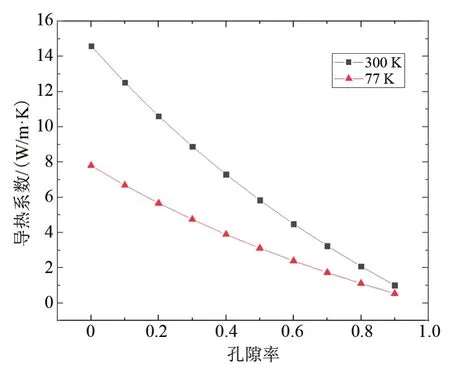
圖3 不同孔隙率對應的彈性墊的有效導熱系數曲線Fig.3 Effective thermal conductivity of elastic pad corresponding to different porosity
綜上所述,選用ε=0.7的彈性墊,計算得該彈性墊的有效導熱系數ke=8.89W/(m·K)。以典型的焦平面杜瓦耦合工況為例,采用導熱率為4 W/(m·K)的低溫導熱硅脂填充0.07 mm的間隙,有效導熱系數ke=8.89W/(m·K),則不銹鋼無序纖維墊厚度0.16 mm即可保證傳熱等效。
2.2 冷平臺的溫度均勻性
在耦合結構中,制冷機冷指采用鈦合金(TC4),彈性體采用8 μm不銹鋼絲綿,導熱橋板與均熱板采用紫銅,冷平臺采用鉬銅40合金。材料導熱系數如表1所列。
利用Workbench軟件對耦合結構進行溫度均勻性仿真計算,輸入條件為:
(1)冷指端面加載恒定溫度74 K作為制冷輸入;
(2)法蘭處加載恒定溫度300 K;
(3)冷板表面均勻加載3.5 W熱流作為模擬熱負載;
(4)初始環境溫度為300 K。
求解計算得到冷平臺表面溫度云圖,如圖4所示。通過熱模擬分析可以看出,冷平臺表面最低溫度為80.217 K,最高溫度80.398 K。冷量由冷頭經過彈性墊傳出,經過橋板兩底座傳遞至均熱板與冷平臺,冷量率先到達冷平臺對應橋板底座位置,隨后向兩邊擴散傳導,最終冷平臺溫度呈現條帶狀階梯分布,而最低溫度點位于冷平臺對應橋板兩底座處。由于安裝支持柱的需要,冷平臺圓弧處沒有橋板、均熱板直接覆蓋冷卻,因此該處冷量傳遞滯后于冷平臺其他位置,故而溫度相對最高。冷平臺最大溫差為0.181 K,滿足溫度均勻性≤0.5 K的要求,冷頭與冷平臺最大傳熱溫差約為6.4 K。
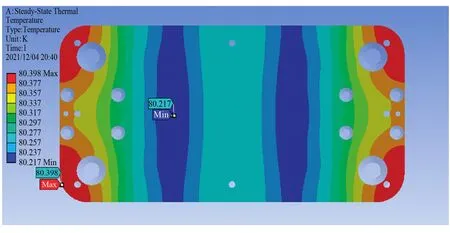
圖4 冷平臺表面溫度云圖Fig.4 Cloud map of the cold platform temperature
2.3 耦合結構的熱應力
在熱耦合過程中,耦合結構整體溫度從300 K降到80 K,劇烈的溫度沖擊會引發熱變形產生熱應力。因此,進行仿真計算以判斷結構是否發生溫沖損傷。以耦合結構的溫度場為輸入,固定法蘭面,利用Workbench軟件Static Structural模塊對耦合結構做熱應力仿真計算。
耦合結構整體熱應力云圖如圖5所示。可以看出最大熱應力為432.9 MPa,位于均熱板十字槽頂角處。由于該處板面尺寸發生突變,因此出現熱應力集中現象,包括耦合結構整體的孔、槽位置,其熱應力都大于耦合結構平均熱應力。由于耦合結構最大熱應力小于鈦合金的屈服強度900 MPa,因此在從80~300 K的溫度變化過程中,耦合結構產生的熱應力對結構穩定性無影響,滿足設計要求。
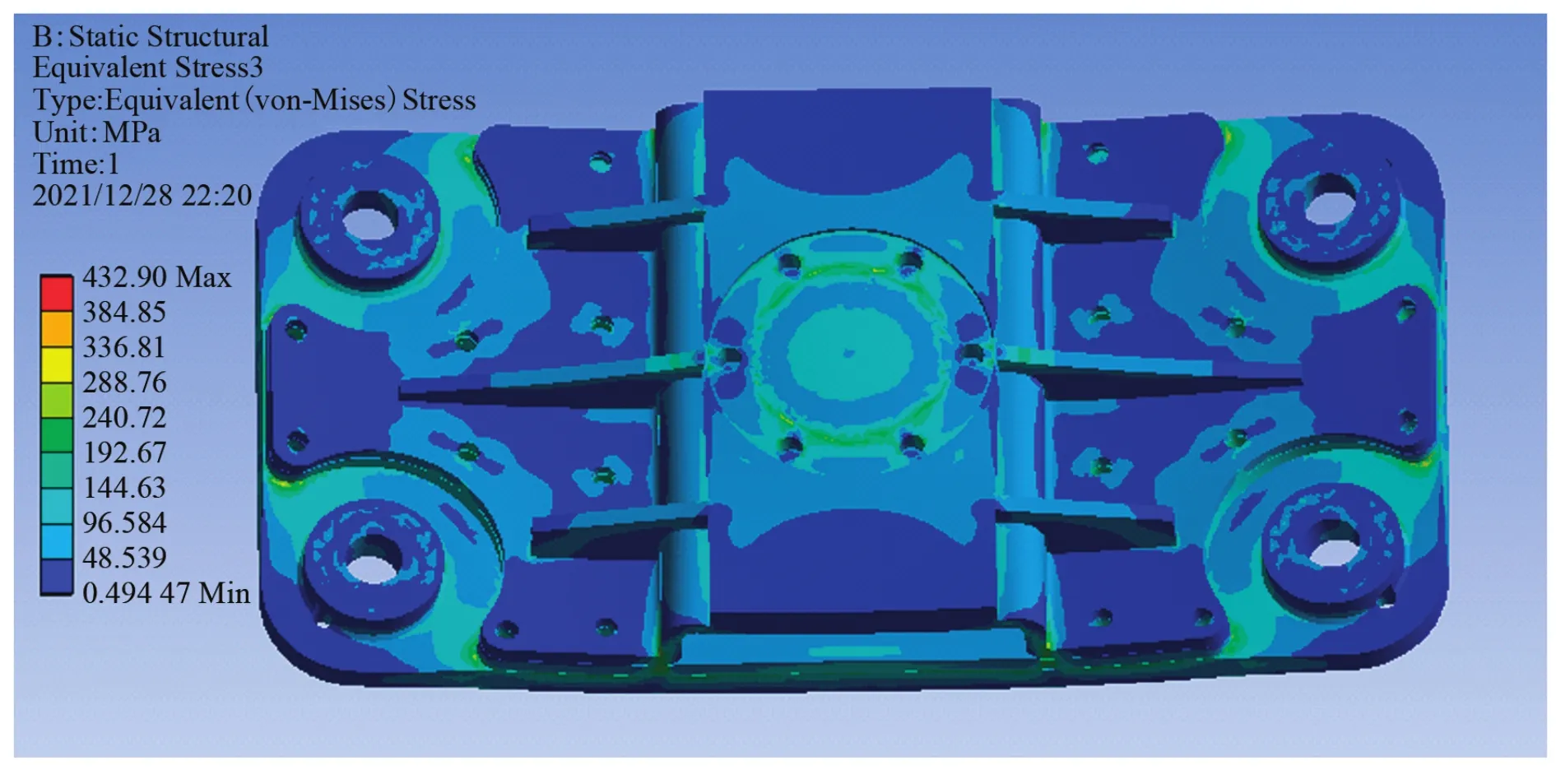
圖5 耦合結構整體熱應力云圖Fig.5 Nephogram of overall thermal stress of coupled structure
3 實驗驗證
采用制冷量為5.5 W@80 K的斯特林制冷機作為冷源,在冷平臺上安裝三支銠鐵電阻(1#、2#、3#)和一支鎧裝加熱電阻,在冷指背面安裝一支銠鐵電阻。銠鐵電阻標定誤差小于0.01 K,作為測溫傳感器,測溫范圍為20~400 K,測量精度≤0.05 K[16]。實驗前,測溫器件表面加裝雙層鍍鋁薄膜,防止熱輻射干擾實驗結果。真空箱壓力小于10-5Pa。
重復進行3次實驗,實驗中冷平臺的最大溫度與最小溫度之差為冷平臺溫度均勻性值,冷平臺最低溫度與冷頭溫度之差為傳熱溫差,實驗結果如表2所列。

表2 制冷機冷平臺溫度均勻性實驗結果Tab.2 Temperature uniformity test results of cooler cooling platform
從表2可以看出,探測器冷平臺在真空箱中的溫度均勻性約為0.2 K,冷頭-冷平臺傳熱溫差約為6.66 K。以仿真計算結果為基準,實驗測得傳熱溫差和溫度均勻性偏差為11.7%和4%,可以滿足大面陣紅外探測器對冷平臺的溫度要求,驗證了所建立模型的準確性和該耦合方案的可行性。
4 結論
本文針對某大面陣紅外探測器80 K工作溫度的需求,設計采用了新型橋板式結構與斯特林制冷機熱耦合,實現了單點冷源向大面陣冷平臺的高效熱耦合。通過對耦合結構的仿真和實驗,結果表明探測器冷平臺溫度均勻性達到0.2 K,優于設計要求。因為溫度變化產生的熱應力小于材料屈服強度,所以彈性墊結構保證了冷指在發生冷縮時,耦合結構冷量傳輸性能良好。驗證了斯特林制冷機與大面陣探測器通過橋板式耦合結構進行冷量傳輸的合理性與可行性,為后續大面陣紅外探測器熱耦合技術發展提供了參考。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
