輕型柔性抓紗機械臂的結構設計與誤差補償
2022-03-19 23:29:41李靖宇沈丹峰王玉李耀杰
絲綢 2022年3期
李靖宇 沈丹峰 王玉 李耀杰






摘要: ??自動換紗是紡織企業智慧車間的重要環節,為了提高織布車間緯紗筒子更換效率,機械臂采用輕型碳纖維材料,本文對抓紗機械臂進行3D建模,設計了一個五自由度抓紗機械臂和三指式末端執行器。提出了一種輕型柔性抓紗機械臂的誤差模型,其中連桿的柔性誤差對抓取的精度有較大的影響,通過有限元分析軟件得出連桿的靜力學仿真,并對比柔性機械臂模型得出的結果,確保各環節分析數據的準確性。針對機構所產生的柔性誤差, 利用BP神經網絡訓練樣本和誤差前饋補償策略,減小機械臂運動過程中的靜態誤差。仿真結果表明,補償后誤差分布大幅度減小,提高了更換筒子紗的準確性和魯棒性。
關鍵詞: ?紡織機械;自動換紗;抓紗機械臂;柔性誤差;BP神經網絡;誤差前饋補償策略
中圖分類號: TS103.1;TP391
文獻標志碼: A
文章編號: 1001 7003(2022)03 0052 07
引用頁碼: 031108
DOI: 10.3969/j.issn.1001-7003.2022.03.008 (篇序)
近年來,材料科學、計算機等相關技術不斷進步,使得機械臂應用領域日益廣泛,功能需求也日漸細化。同時,針對紡織業中筒子紗的搬運和更換,輕型機械臂也有較好的應用效果。筒子紗存在于紡織生產中的多道工序中,比如絡筒、整經、織布等,而不同的生產工序要求機械臂能夠快速攜帶筒子紗的移動,故輕型機械臂利用其質量低、轉動慣量小、移動靈活且功耗低等特點,在復雜多變的工況下具備較高的作業效率。因此,以無梭織機車間緯紗筒子的自動搬運更換為研究背景,緯紗架上的紗筒采用機械手更換是目前的工廠自動化研究方向。
本文采用誤差前饋補償的方法完成了對輕型抓紗機械臂誤差模型的修正。對于機械臂的誤差分析與修正,譚月勝等? [1] 以IRB140型剛柔耦合的串聯機械臂為研究對象,結合ANSYS和ADAMS軟件對機械臂末端位置運動做誤差仿真,提出基于BP網絡的偽坐標點法對位置誤差進行補償,但關節驅動電機、機械臂啟動時末端震動等因素對末端綜合運動誤差造成了較大影響。吳昊等? [2] 為了提高柔性機械臂的末端軌跡的精度,提出了一種線性且連續化模型預測的控制方法,但該機構產生的關節柔性會使機械臂的動作非常緩慢,同時也可能產生明顯的振蕩。陳宵燕等? [3] 針對串聯多模式機器人及誤差修正進行了相關研究,設計了幾何和柔性誤差模型,提出了一種線性遞減權重的粒子群算法。邢強等? [4] 根據工業機器人零部件的加工、裝配及安裝誤差,研究了機器人零部件的位置誤差對末端位置精度的影響,對機器人制造公差的設置與優化提供了參考依據,但大臂和腰部的關節軸線異面垂直存在擾動時,需要重新定義坐標系。張旭祥等? [5] 為了獲得平面冗余并聯機器人運動副間隙誤差變化關系,引入彈簧阻尼法理論基礎建立含關節間隙的并聯機構虛擬樣機,完成含有不同運動副間隙誤差的并聯機器人的運動仿真,但隨著關節間隙越大,末端點偏離標準軌跡的幾率越高,機構運行精度隨之降低。沈丹峰等? [6] 參考固高GPM2012機器人,選取順時針構型,建立了該機構的輸出點位置方程組和誤差方程,運用泰勒展開式獲得了誤差項。高田田等? [7] 提出了基于極坐標建模和優化粒子群算法的足球機器人路徑規劃方法,根據路徑點和障礙物點距離的關系判斷是否進行路徑規劃。TAN? [8] 利用壓縮感知法對串聯機械臂的幾何誤差給予了補償。VOLECH等? [9] 在機器人的減速器和柔性連桿仿真時獲得了機器人末端的變形量,以輸入整形法對機器人末端進行了補償。LIU等? [10] 利用七次多項式聯合粒子群算法對機械臂關節進行軌跡規劃,減小了機械臂末端的綜合誤差,而通過運動學標定方法減小柔性誤差時,其效果不佳。齊俊德等? [11] 為了提高機器人的絕對定位精度,對柔度誤差進行解耦,并考慮了機器人基于坐標系與測量坐標系的轉換誤差,平均絕對定位精度由補償前的1.173 mm降至補償后的0.158 mm。付鵬強等? [12] 針對航空制造業中工業機器人存在的實際位姿與理論位姿偏差問題,解析了對飛機零部件連接性能產生的影響,根據闡述的運動學建模、位姿測量、運動學參數誤差辨識及誤差補償等關鍵步驟,歸納總結各步驟中存在的問題和可能的解決方案。董大釗等? [13] 為了解決工件與柔性夾具相對位置具有不確定性的問題,提出了基于視覺引導的機器人裝配位姿在線校正算法,將工件位姿校正量分解為原始位姿差、旋轉引入位姿差及殘余位姿差三部分,實驗過程中裝配成功率達到99.67 % 。張樹梅等? [14] 以6-PTRT并聯機器人為研究對象,利用單支鏈閉環矢量法,基于帶收縮因子的自適應權重粒子群算法尋找各個驅動桿誤差參數,修正末端位姿、提高運動學精度。
本文的主要研究對象是輕型柔性抓紗機械臂的誤差模型,由于在紡織車間內環境復雜且移動空間局促,常見的六自由度的機械臂雖然靈活度高,但是關節多帶來結構復雜、體型偏大的缺點,因此設計了五自由度的輕型機械臂和三指式末端執行器,兩者結合成一個自主移動式紗筒車。先通過有限元法得出連桿的變形位移量,并計算出相比筒子紗質心的偏移量,即誤差的大小,同時將位移量與柔性連桿的誤差模型做對比,確保數據的可靠性與真實性。再利用誤差前饋補償策略,降低抓取筒子紗過程中的誤差分布。
1 輕型柔性抓紗機械臂設計方案
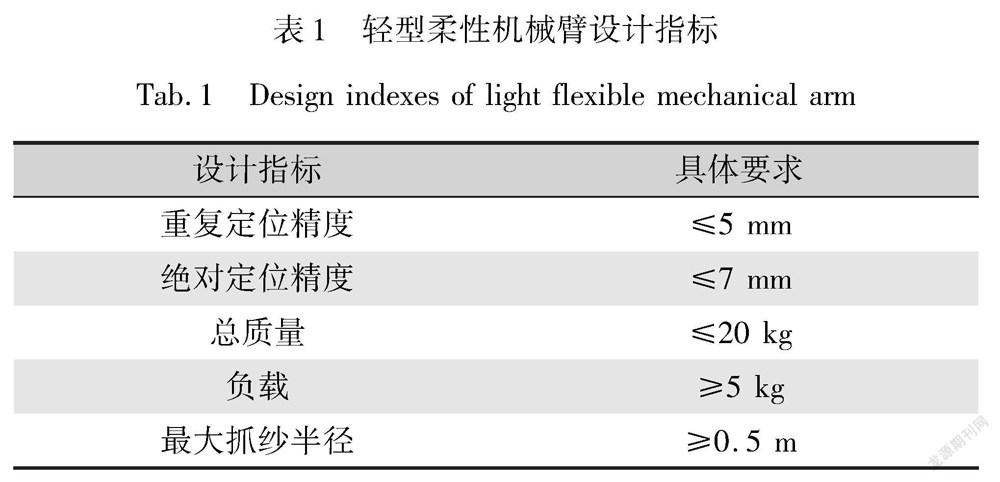
本文所研究的輕型柔性機械臂是為抓取筒子紗而設計,關鍵的參數指標如表1所示。
紗筒車整體結構如圖1所示,其中本體包含五自由度輕型機械臂、箱體、筒子紗、工業相機、車輪、末端執行器等。箱 體內部9個固定點放置筒子紗,采用雙層碼放,可放置18個
筒子紗。采用自動AGV移動紗筒車到達指定的位置,通過機械臂實現筒子紗的自動更換。五自由度機械臂的等效矢量機構如圖2所示,包括三個移動副和兩個轉動副,伸縮桿的長度分別為: L? 1=18~26 cm, L? 2=24~36 cm, L? 3=11~18 cm。
根據抓紗與換紗范圍的要求,機械臂完全展開后的長度可達1 m,同時具有較強的柔彈性,便于操作與控制。
末端執行器的結構如圖3所示,機械手為三指式平移型夾持機構,該機構夾持誤差小且符合夾持范圍。手指的結構如圖4所示,每根手指有三個指節,分為上、中和下指節,關節連接處由扭簧實現機械手的張開與閉合,手指內表面粘有橡膠層,可以起到減輕對紗線的損壞,并且裝有壓力傳感器,可 以實時監測筒子紗受到的擠壓力,確保加持力大小在合理的范圍內。材料選用輕型鋁合金薄片,其他零件材料適當選用工程塑料,利用其質量輕、剛度大等優點,可以有效地降低機械臂的整體質量,同時滿足抓紗的要求。
2 柔性誤差模型與有限元分析
常見的機器人誤差研究中,大部分考慮的是幾何參數誤差,或者一些關節間隙、慣性、溫度等,而連桿的柔性誤差對末端的精度影響也尤為重要。輕型機械臂存在的柔性誤差較為復雜,誤差主要來源于外加負載 造成的柔性變形引起的末端偏移。因此,需要建立連桿的誤差模型,推導出連桿的柔度矩陣,再對機構的連桿柔性進行有限元分析,同時驗證數據的準確性。
2.1 連桿誤差模型
圖5是連桿的受力變形分析,其中 l 為連桿的長度, θ 為連桿末端轉角, w 為末端撓度,連桿共受三種力的作用:均勻分布的載荷 Q 、施加的外力 F 和形變產生的彎矩 δ 。根據梁的變形理論,當施加多種載荷作用到梁時,其變形量可以逐個疊加得到,即分別求出單個載荷導致的形變再相加。
在外力 F 的作用下,末端轉角 θ 和 w 撓度分別為:
θ= -Fl 2 2EI ???(1)
w= -Fl 3 3EI ???(2)
式中: E 為彈性模量, I 為梁的截面慣性矩。
由此可以得到連桿在不同外力下的轉角與撓度。
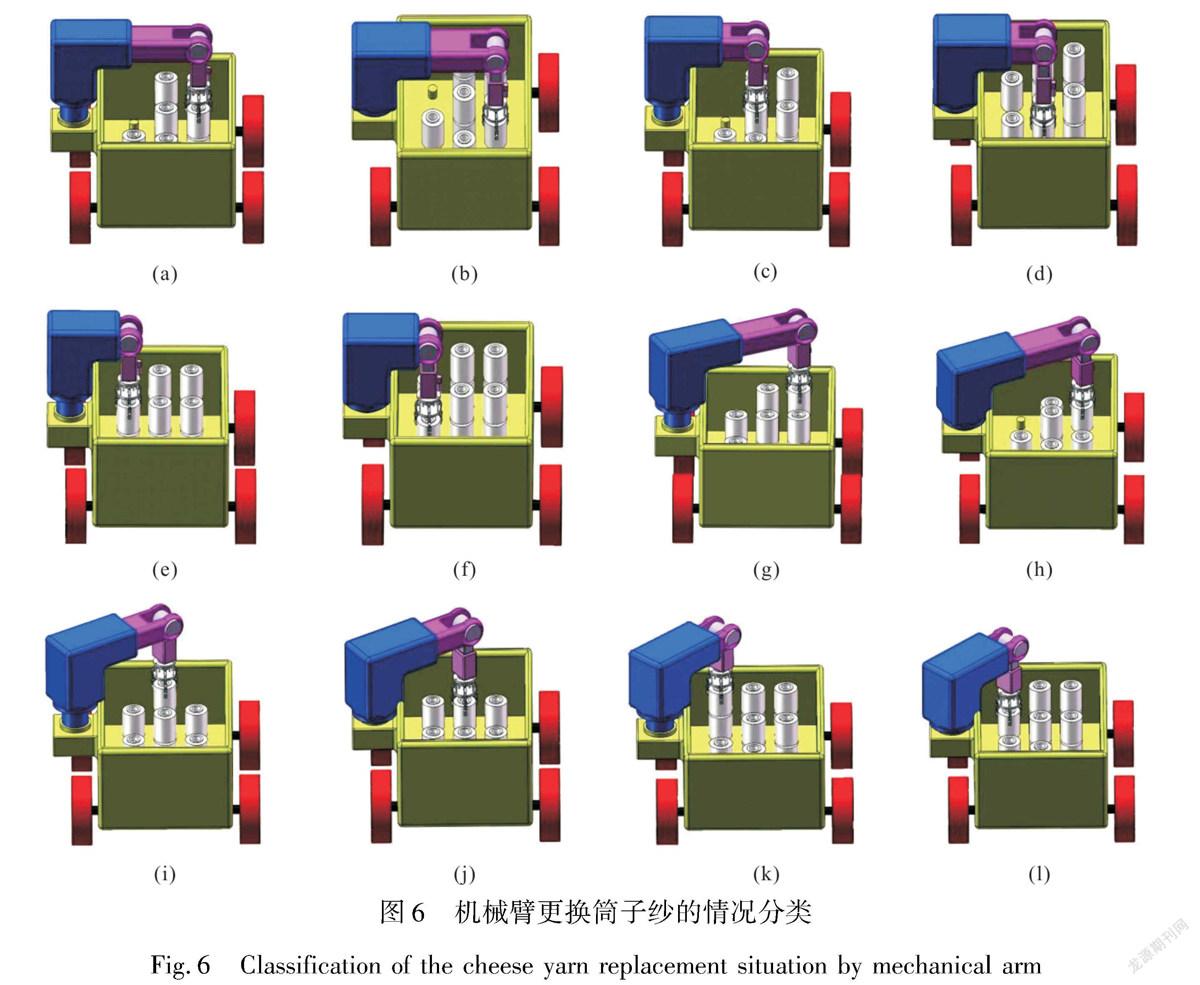
當連桿的變形產生位置誤差,機械臂的姿態也發生了變化。本文以紗筒車的箱體建立直角坐標系,內部有9個固定筒子紗位置,并以筒子紗的質心為抓取坐標值。筒子紗的更換包括兩種情況:第一種是抓取筒子紗時,由于車內紗筒在小車移動過程有可能發生位置偏移,因此采用機器視覺方法進行紗筒中心定位? [15] ,提高抓取的精度。第二種是放置筒子紗時,負載的重量致使機械臂發生了形變,導致放置筒子紗到固定點時產生偏差,因此通過調節其他關節的角度進行補償。理想狀態下,具體筒子紗的抓取與放置情況如圖6所示。
從圖6可以看出,(a)~(f)為機械臂抓取中間列筒子紗的位姿情況,理想狀態下筒子紗的質心坐標分別為(0,205,30)(0,205,60)(0,135,30)(0,135,60)(0,65,30)(0,65,60); (g)~(l)為 機械臂抓取左側列筒子紗的位姿情況,同理筒子紗的質心坐標分別為(-130,205,30)(-130,205,60)(-130,135,30)(-130,135,60)(-130,65,30)(-130,65,60);右側列的筒子紗坐標與左側列對稱,即坐標分別為(130,205,30)、(130,205,60)(130,135,30)(130,135,60)(130,65,30)(130,65,60)。根據式(1)(2) 可求出機械臂在上述不同位姿下的末端撓度和轉角,然后轉化為坐標值,即為抓紗引起形變的誤差大小。
2.2 有限元分析與數據驗證
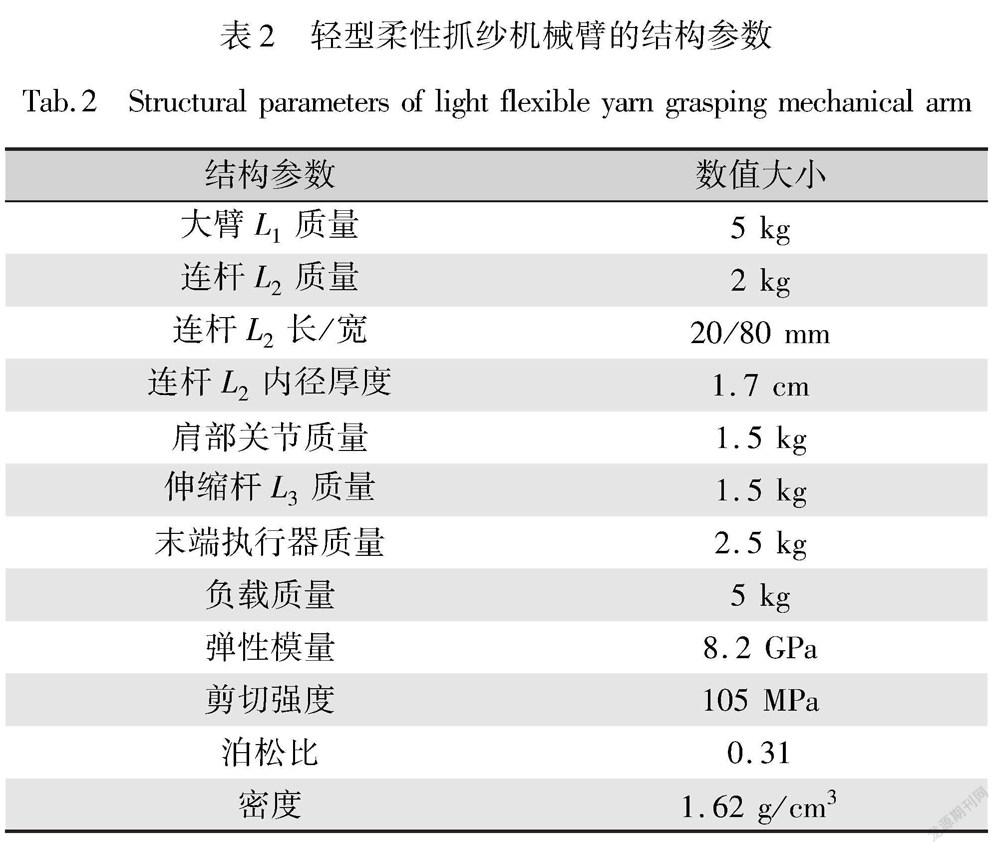
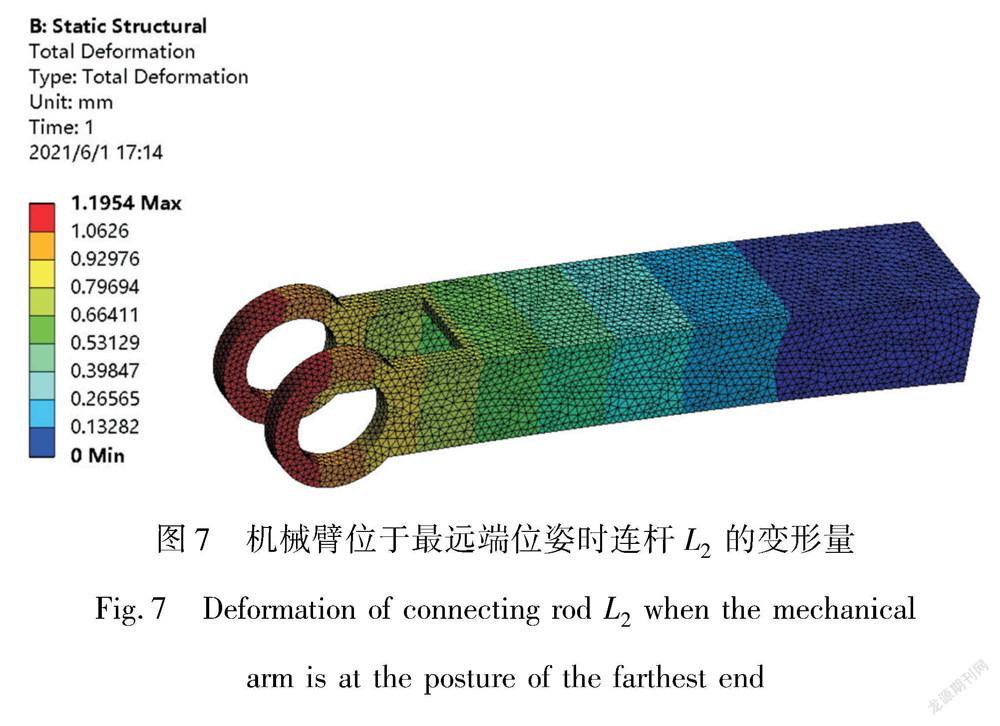
從圖1可以看出,在抓起筒子紗的過程中,輕型機械臂的連桿 L? 2為主要的變形桿件,大臂、腰部和末端執行器等剛度較高,不易產生變形。因此將機械臂的運動位姿作為靜態處理,即靜力學分析。連桿 L? 2材料選用碳纖維,涉及主要的結構參數如表2所示。
由于通過建立模型計算得到的誤差很難確保數據的準確性,所以將誤差模型中連桿 L? 2導入ANSYS分析軟件,生成連桿變形的位移量,并將兩組數據進行對比。紗筒車內共有18個筒子紗的質心點,與之相對應機械臂存在18種不同的柔性誤差。在相同的條件下,要求機械臂重復達到目標位姿的程度要盡可能相同,重復定位的精度也就尤為重要。因此在實驗過程中,將筒子紗的質心點隨意組合打亂,并加入不相干的坐標,以提高結果數據的嚴謹性和魯棒性。
把連桿 L? 2作為研究對象,通過ANSYS分析軟件,設置不同位姿下連桿的長度、材料屬性和負載重量,選取30個樣本考察點,其中要求每個質心點重復兩次以上, 得到多組連桿 L? 2的變形量,如圖7所示。由圖7可見,輕型機械臂處于最遠端位姿下的連桿 L? 2變形情況,位移量為1.195 4 mm,即圖6(g)的位姿。
根據所得數據可知,機械臂柔性是導致連桿變形的關鍵因素。同時需要指出的是,在靜力學仿真過程中并未將關節的柔性計算在內,機械臂運動到不同的坐標下誤差僅是由連桿柔性造成的。之所以未考慮關節柔性,包括以下原因:一是關節剛度等參數要通過實驗所獲得,二是關節柔性的建模用于仿真得出數據的準確性很難得到保證。相比之下連桿的形變對末端姿態的影響更為重要,因此仿真過程以柔性誤差為主要影響因素,其他誤差暫且忽略不計。
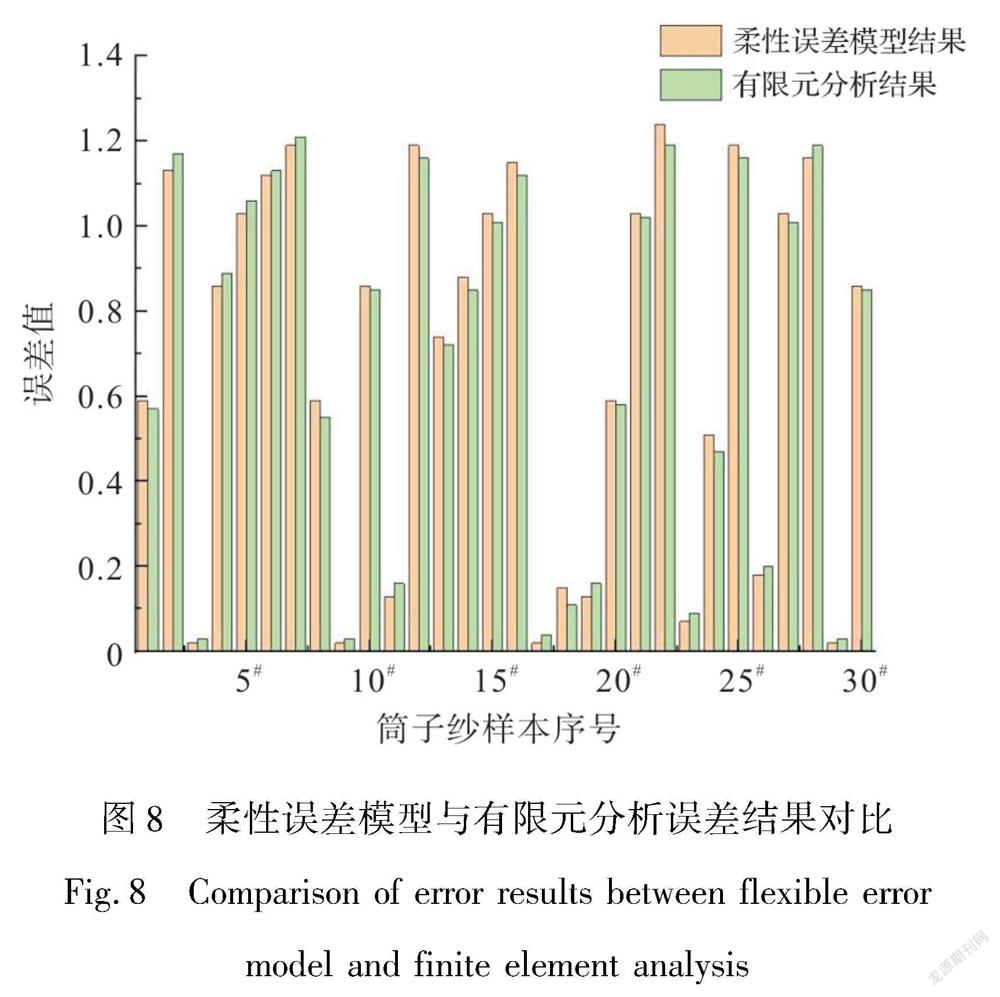
為了考察柔性誤差模型的準確度,本文分別分析了柔性誤差模型與有限元分析所得到的誤差并進行了對比,如圖8所示。
由圖8可知,通過大量的樣本實驗,柔性誤差模型與有限元分析兩者的結果誤差值相似,建立的誤差模型可以作為判斷柔性機械臂誤差的依據,同時驗證了數據的準確性。
3 柔性機械臂的可補償性分析
3.1 BP神經網絡算法
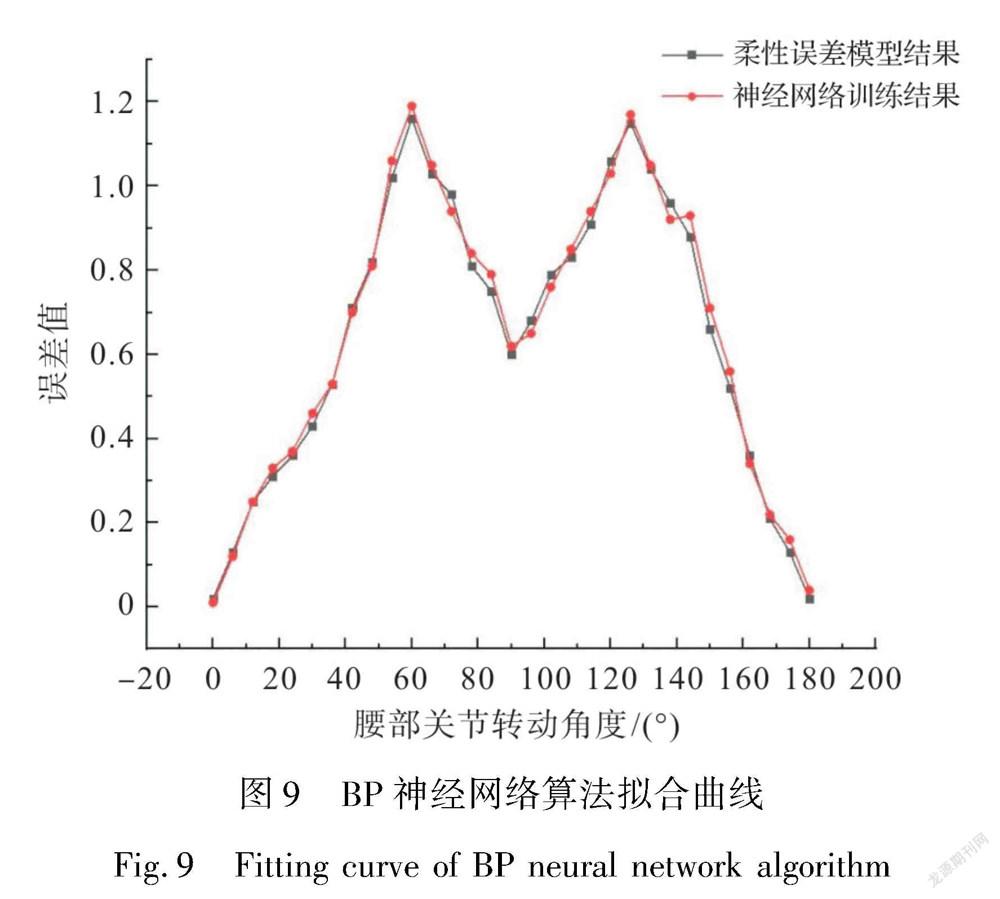
基于得出的誤差變化是具有非線性的數據集,而神經網絡算法對于非線性或無規律數據具有很好的擬合作用。因此可通過BP神經網絡算法訓練且預測柔性誤差,輸入數據為在箱體范圍內腰部關節的轉動角度,輸出數據為連桿 L? 2的變形量即誤差值,并計算誤差值求出連桿 L? 2的末端轉角 θ 。把上述柔性誤差模型得出的30組誤差數據作為實驗樣本,利用BP神經網絡算法進行訓練,可以擬合出網絡訓練輸出誤差和誤差模型所得誤差值的對比曲線,如圖9所示。
由圖9可以看出,BP算法對于柔性誤差數據具有很好的擬合效果,其擬合率達98.65 % 。網絡訓練輸出的誤差與模型誤差兩者雖有較小的差距,但對后續的補償研究不會產生影響,并保存訓練好的網絡,之后可用于預測誤差補償的數據庫。
3.2 誤差前饋補償
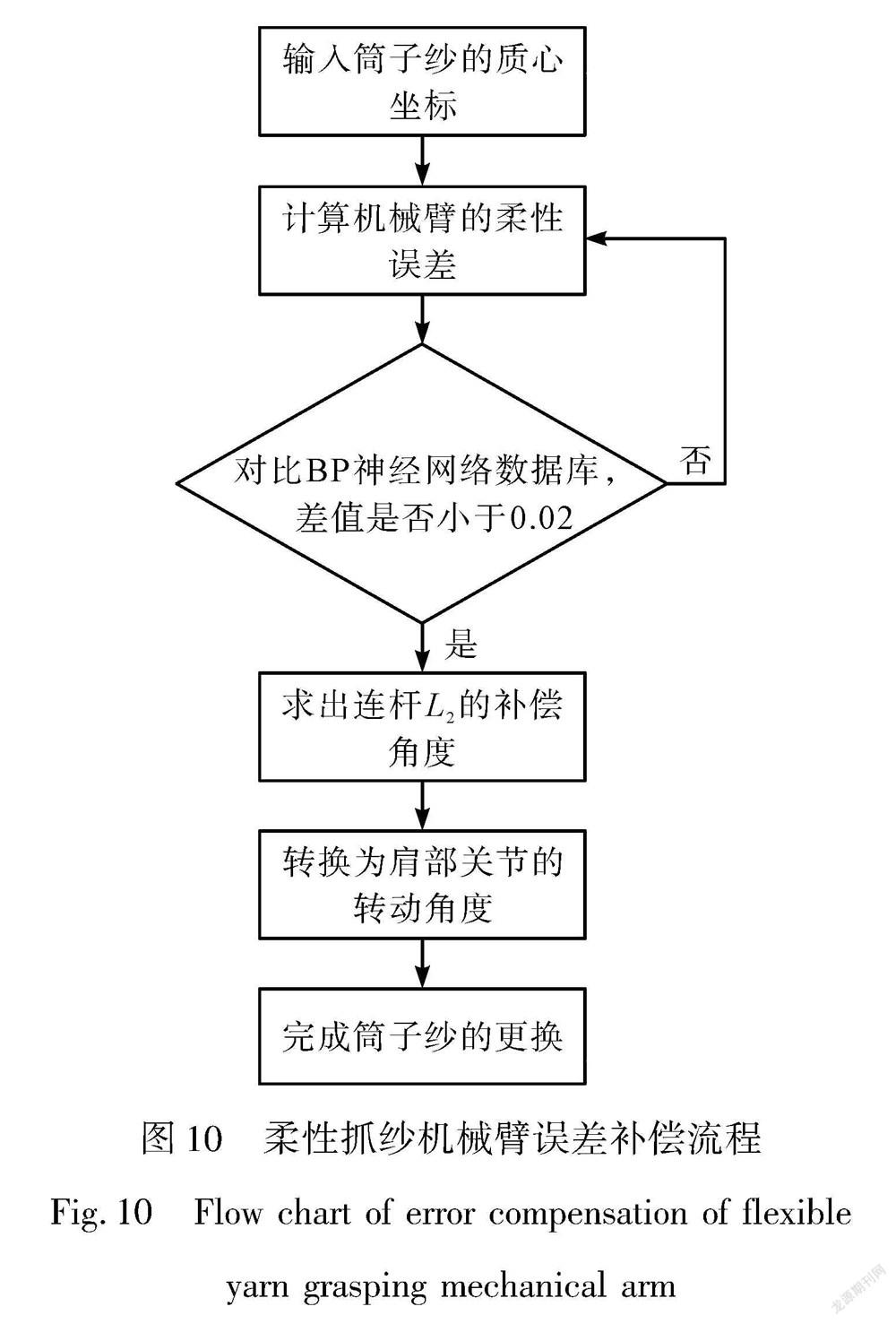
由于前文分析中柔性誤差的存在,所以機械手末端不能按照給定的質心坐標準確地運動,并且影響機械手末端執行器的定位精度及使得運動軌跡產生誤差。因此,為了使機械手更加接近理想的軌跡進行運動,對機械手進行誤差補償就變成了一個很重要的問題,在前文機械臂柔性誤差分析的基礎上,提出柔性機械臂誤差補償的方法、原理及步驟,并對機械手末端的位姿誤差進行補償實驗,流程如圖10所示。
從圖8的數據結果還可以看出,柔性機械臂在除了在抓取近端筒子紗時誤差較小,處于中間和遠端時產生的誤差是不可忽視的。只要柔性機械臂運動到上述坐標點的位置,就可以提前對連桿 L? 2進行角度補償,因此通過計算機軟件來調整參數補償誤差。該方法是在求出連桿 L? 2補償角度后進一步轉換為肩部關節轉動角度,其優點是比較容易修改且不另外增加成本。通過對柔性誤差模型的補償性分析,確保機械臂在更換不同筒子紗時,能夠準確、快速地實時補償,即誤差前饋補償策略。根據前文的誤差模型分析,計算出各個位姿的補償角,如表3所示。
同理,右側列的筒子紗補償角度與左側列相同,通過表3的數據提前在機械臂運動到指定位置給出補償角度,提高抓取與放置筒子紗的精度。采用上述補償角度,同樣測試30個樣本點,其余的樣本點補償角度不再展示,補償前后的誤差分布如圖11所示。
從圖11可以看出,利用誤差前饋補償策略,使得多數誤差得到了有效的修正。由此證明,本文的方法較大地提高了柔性機械臂的絕對定位精度,能夠實現在多數情況下對筒子紗的準確更換。
4 結 論
為了實現對筒子紗的精確抓取,本文基于柔性誤差模型做出了針對抓紗機械臂誤差可行性分析的流程方案。
1) 設計了一種新式的紗筒車,結構主要包括輕型機械臂、箱體和末端執行器等,具有良好的靈活性和移動性,便于控制與操作。
2) 建立受力連桿的誤差模型,根據梁的變形理論求出機
械臂在不同位姿下的末端撓度和轉角,并且通過有限元分析與之相比較,提高數據的真實性和準確性。
3) 利用BP神經網絡算法進行訓練,擬合出柔性誤差數據的對比曲線,用于誤差補償的預測。通過上述方法整理出不同目標坐標下連桿 L? 2的補償角度,利用計算機軟件轉化為肩部關節的轉動角度,再得出補償前后的誤差分布圖。根據實驗結果可知,誤差的分布大幅度減少,較大地提高了筒子紗更換的精度。
參考文獻:
[1]? 譚月勝, 詹登輝, 張彭郝, 等. 剛柔耦合串聯機械臂末端位置誤差分析與補償[J]. 農業機械學報, 2020, 52(2): 418-424.
TAN Yuesheng, ZHAN Denghui, ZHANG Penghao, et al. Analysis and compensation of end position error of rigid-flexible coupling serial manipulator[J]. Journal of Agricultural Machinery, 2020, 52(2): 418-424.
[2] 吳昊, 譚元, 郭小龍, 等. 一種基于模型預測控制的柔性關節空間機械臂的軌跡跟蹤控制[J]. 空間控制技術與應用, 2019, 45(2): 35-41.
WU Hao, TAN Yuan, GUO Xiaolong, et al. A model predictive controlbased trajectory tracking controller design for space flexible joint manipulators[J]. Space Control Technology and Application, 2019, 45(2): 35-41.
[3]? 陳宵燕, 張秋菊, 孫沂琳, 等. 串聯機器人多模式標定與剛柔耦合誤差補償方法研究[J]. 農業機械學報, 2019, 50(3): 396-403.
CHEN Xiaoyan, ZHANG Qiuju, SUN Yilin, et al. Multi-mode calibraton and rigid-flexible coupling error compensation method of serial robot[J]. Journal of Agricultural Machinery, 2019, 50(3): 396-403.
[4] 邢強, 許超. 位置誤差對關節式工業機器人末端精度的影響研究[J]. 機械設計與制造工程, 2016 (3): 41-45.
XING Qiang, XU Chao. The effect of the joint position error on the end-accuracy of an articulated industrial robots[J]. Mechanical Design and Manufacturing Engineering, 2016 (3): 41-45.
[5] 張旭祥, 劉夏軒德, 張國英, 等. 含關節間隙的并聯機器人運動誤差分析[J]. 西安工程大學學報, 2020, 34(1): 92-96.
ZHANG Xuxiang, LIU Xiaxuande, ZHANG Guoying, et al. Motion error analysis of parallel robot ?with joint clearance[J]. Journal of Xi’an ?Polytechnic University, 2020, 34(1): 92-96.
[6] 沈丹峰, 葉國銘, 王貫超, 等. 二自由度平面冗余并聯機構桿件長度的誤差分析[J]. 機械設計, 2017, 34(5): 65-70.
SHEN Danfeng, YE Guoming, WANG Guanchao, et al. Error analysis of bar length of two-degree-of-freedom planar redundant parallel mechanism[J]. Mechanical Design, 2017, 34(5): 65-70.
[7] 高田田, 張莉, 李炳德, 等. 基于改進粒子群算法的足球機器人路徑規劃[J]. 西安工程大學學報, 2016, 30 (5): 609-615.
GAO Tiantian, ZHANG Li, LI Bingde, et al. Study on path planning of soccer robot based on improved particle swarm algorithm[J]. Journal of Xi’an Polytechnic University, 2016, 30 (5): 609-615.
[8]TAN ?N. Calibration for accuracy improvement of serial manipulators based on compressed sensing[J]. Electronics Letters, 2015, 51(11): 820-822.
[9]VOLECH J, LADISLAV M, ZBYNEK S, et al. Model of flexible robot with deformat ion detection[J]. Procedia Engineering, 2014, 96: 510-516.
[10] LIU ?Z F, XU J J, CHENG Q, et al. Trajectory planning with minimum synthesis error for industrial robots using screw theory[J]. International Journal of Precision Engineering and Manufacturing, 2018, 19(2): 183-193.
[11]? 齊俊德, 張定華, 李山, 等. 工業機器人絕對定位誤差的建模與補償[J]. 華南理工大學學報(自然科學版), 2016, 44(11): 113-118.
QI Junde, ZHANG Dinghua, LI Shan, et al. Modeling and compensation of absolute positioning error of industrial robot[J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(11): 113-118.
[12] 付鵬強, 姜曉燦, 苗宇航, 等. 工業機器人絕對定位誤差補償技術研究進展[J]. 科學導報, 2021, 39(13): 96-104.
FU Pengqiang, JIANG Xiaocan, MIAO Yuhang, et al. Summary of absolute positioning error compensation technology for industrial robot[J]. Science Herald, 2021, 39(13): 96-104.
[13]? 董大釗, 徐冠華, 高繼良, 等. 基于機器視覺的機器人裝配位姿在線校正算法[J]. 浙江大學學報(工學版), 2021, 55(1): 146-151.
DONG Dazhao, XU Guanhua, GAO Jiliang, et al. Online-correction algorithm for posture by robot assembly based on machine vision[J]. Journal of Zhejiang University (Engineering Edition), 2021, 55(1): 146-151.
[14]? 張樹梅, 高興君, 鄧子龍, 等. 基于粒子優化算法的并聯機器人誤差建模分析[J]. 遼寧石油化工大學學報, 2021, 41(5): 80-84.
ZHANG Shumei, GAO Xingjun, DENG Zilong, et al. Error modeling and analysis of parallel robot based on particle optimization algorithm[J]. Journal of Liaoning Shihua University, 2021, 41(5): 80-84.
[15] 李靖宇, 沈丹峰, 王玉, 等. 基于參數可調均值遷移濾波實現筒子紗的識別檢測[J]. 輕工機械, 2021, 39(3): 64-68.
LI Jingyu, SHEN Danfeng, WANG Yu, et al. Recognition and detection of cheese based on edge preserving filtering algorihm[J]. Light Industry Machinery, 2021, 39(3): 64-68.
Structure design and error compensation of light flexible yarn grasping mechanical arm
LI Jingyu, SHEN Danfeng, WANG Yu, LI Yaojie
(Collegeof Mechanical and Electrical Engineering, Xi’an Polytechnic University, Xi’an 710600, China)
?Abstract:
With the advancement of science and technology and the development of automation technology, the textile industry has begun to replace human labor with textile machinery, thus getting rid of the limitations of traditional handicrafts. Among them, cheese yarn is used in many processes in textile production, such as winding, warping and weaving. As a terminal product of textile technology, cheese yarn has obtained wide application. The transportation, loading and unloading of frames, and packaging of cheese yarn require a lot of manpower and high labor intensity while exhibits low efficiency. Due to the continuous increase in labor costs, the labor-intensive textile industry has been greatly impacted, and labor shortages have become increasingly severe. Therefore, improving the industrial technology and production equipment in the textile field is an effective measure to enhance the competitiveness of enterprises and reduce their own costs. The transformation of the textile industry from large-scale labor-intensive industry to major technology-supported high-tech industry has become an inevitable trend.
Automatic yarn replacement is an important link in the smart workshop of textile enterprises. In order to improve the efficiency of weft cheese yarn replacement in the weaving workshop, the mechanical arm is made of light carbon fiber materials. In this article, through 3D modeling of the yarn grasping mechanical arm, a five-degree-of-freedom yarn grasping mechanical arm and three-finger end effector are designed. An error model of a lightweight flexible grasping mechanical arm is proposed, in which the flexibility error of the connecting rod has a significant impact on the accuracy of yarn grasping. The statics simulation of the connecting rod is obtained through the finite element analysis software and is compared with the results obtained by the model of the flexible mechanical arm so as to ensure the accuracy of the analysis data in each link. To address the flexibility error generated by the mechanism, the BP neural network training samples and error feedforward compensation strategy are used to reduce the static error during the movement of the mechanical arm. The simulation results show that the error distribution is greatly reduced after compensation, thereby improving the accuracy and robustness of cheese yarn replacement.
This method provides a new thought for yarn replacement operations in the textile industry. Substituting labor with intelligent yarn grasping mechanical arm is a new trend in the traditional manufacturing industry and it is also expected to become an important indicator of the automation degree in the manufacturing industry. The flexibility error existing in the connecting rod of most mechanical arms has a great influence on the actual grasping accuracy. According to the comparison of theoretical analysis and experimental verification results, the error feedforward compensation strategy proposed in this paper can provide reference suggestions for the development of manipulators.
Key words:
textile machinery; automatic yarn replacement; yarn grasping mechanical arm; flexibility error; BP neural network; error feedforward compensation strategy
3459501186598
