基于激光雷達的路燈識別及定位系統(tǒng)研究
2022-03-15 05:40:18郅曉昌李曉雷
現(xiàn)代機械 2022年1期
郅曉昌,李曉雷
(長安大學工程機械學院,陜西 西安 710064)
0 引言
由于路燈大都處在露天場所,長期使用后燈罩上會堆積大量灰塵從而影響路面的照明效果,對道路安全構成危害。本文設計了基于激光雷達的路燈燈罩定位系統(tǒng),為路燈清洗設備的舉升移動提供精確的位置信息。
激光雷達由于可以獲得極高的角度、距離分辨率和良好的抗干擾能力,被大量應用于目標的識別和定位中。文獻[1]采用單線激光雷達檢測障礙物的位置和移動速度,在低速駕駛的條件下,該方法能夠有效識別車輛前方30 m的移動障礙物并檢測其位置和速度;文獻[2]提出了一種基于雷達測距的車輛識別與跟蹤方法,通過提取車輛目標的直線和直角特征來識別車輛,并利用卡爾曼濾波器根據(jù)關聯(lián)結果更新目標的狀態(tài),實現(xiàn)對行駛車輛的跟蹤;文獻[3]通過車載激光掃描實現(xiàn)電線桿的自動識別與定位,該識別系統(tǒng)通過將電線桿的點云桿狀數(shù)據(jù)擬合成為一條空間直線,以電線桿的幾何特性作為期望值和方差,自動識別電線桿;文獻[4]通過雷達自動采集參考目標來計算船舶的距離和方位,并結合航跡數(shù)學模型實現(xiàn)船舶的自動定位。
本文利用路燈桿的幾何特點,建立了燈罩的識別定位系統(tǒng)。首先在燈桿的識別過程中,劃定識別的ROI區(qū)域,并對雷達點云進行聚類、擬合處理,識別出燈桿,再通過路燈的幾何尺寸得到燈罩的空間坐標。本文設計的路燈識別定位系統(tǒng)為路燈的清潔提供了精確的位置信息,對道路照明、行人行車的安全和城市美化都具有重要的工程價值。
1 路燈定位系統(tǒng)的結構與組成
為實現(xiàn)燈桿、燈罩的識別及定位,建立了路燈的定位系統(tǒng)如圖1所示。該系統(tǒng)采用兩個激光雷達來實現(xiàn)燈罩定位,系統(tǒng)以清洗平臺上表面中心為坐標原點O,清洗車行駛的方向為y軸,與車輛行駛方向垂直的方向為 x 軸,豎直方向為z軸。傳感器安裝方式如下:將一個雷達放置在清洗平臺下表面,即原點O的正下方,用于測量清洗平臺上升的高度;另一個激光雷達放置在車的最右側,盡可能減少公路上機動車等雜物干擾燈桿的識別,同時為減少計算量,將它放置在測高傳感器的正右方,即x軸上。
2 燈桿的識別
2.1 激光雷達測距原理
激光雷達使用的測距技術是飛行時間(TOF,Time of Flight),即根據(jù)發(fā)射的激光束遇到障礙物后的折返時間,計算目標距雷達的距離,從而完成目標的定位[4],其工作原理如圖2所示。
激光器Laser以一定的角度beta射出一束激光,沿激光方向距離為d的物體反射激光。焦距是f,物體離平面的垂直距離是q,激光器和焦點間的距離是s,過焦點平行于激光方向的虛線,物體激光反射后成像在Imager上的點位置離該處的距離為x。f/x=q/s,則q=f*s/x,又由于sin(beta)=q/d,可得d=q/sin(beta),最終得:d=f*s/(x*sin(beta))。
三維激光雷達能夠獲得目標物豐富的點云信息,但價格昂貴,給清洗車輛普及帶來較大的挑戰(zhàn),本文采用思嵐二維激光雷達RPLIDAR A1,它結構簡單,并且價格低廉,可進行每秒高達8000次以上的測距動作。雷達的參數(shù)如表1。
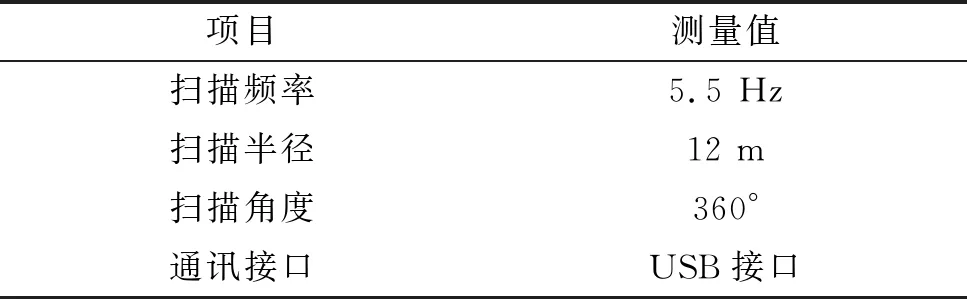
表1 RPLIDAR A1雷達性能參數(shù)
2.2 燈桿點云數(shù)據(jù)的處理
2.2.1 燈桿識別ROI區(qū)域的劃定
由于思嵐二維激光雷達獲取360°的點云數(shù)據(jù),處理的數(shù)據(jù)量較大,而在實際路燈定位工作中,燈桿總位于清洗車的右前方,根據(jù)這一工況,劃定了燈桿識別的感興趣區(qū)域(圖3),設定車輛前進的方向為0°,順時針為正方向,劃定閾值30°~120°,以雷達中心為半徑的d1~d2區(qū)域為ROI區(qū)域(圖3),這樣可以縮小點云數(shù)據(jù)處理量,加快處理速度。
2.2.2 燈桿點云聚類分析
為方便燈桿的擬合,首先對ROI區(qū)域中的點云進行聚類分析。聚類即按照某個特定標準(如距離準則,即數(shù)據(jù)點之間的距離)把一個數(shù)據(jù)集分割成不同的類或簇,使得同一個簇內(nèi)的數(shù)據(jù)對象的相似性盡可能大,同時不在同一個簇中的數(shù)據(jù)對象的差異性也盡可能大。目前,常用的聚類方法有劃分方法、層次方法、基于密度的方法,本文采用 DBSCAN聚類算法進行分析。
DBSCAN是一種典型的基于密度的聚類算法,該算法的基本思想是:每個簇的內(nèi)部點的密度比簇外點的密度高得多,定義為密度相連的最大對象集。為提高聚類的效果,降低算法的復雜度,數(shù)據(jù)點間的相似度直接采用歐式距離[6]。若兩個連續(xù)數(shù)據(jù)點間的距離大于閾值Dmax,則認為兩點不連續(xù),其表達式如下:
(1)
式中:pn、pn-1為連續(xù)兩個點云的距離值。
由于激光雷達的激光束成扇形的掃描特性,且角度分辨率是確定的,所以相鄰兩激光反射點間的距離是隨光束的延長而線性增加的,故距離閾值Dmax應取決于數(shù)據(jù)點的深度值,即該點到雷達間的距離值。Borges等人提出了一種根據(jù)深度值來確定距離閾值的方法,計算式如下:
(2)
式中:rn-1為點pn-1的深度值,σr為激光雷達的測量誤差,Δ?為激光雷達的角度分辨率,λ為閾值因數(shù),一般通過經(jīng)驗獲得。
2.2.3 燈桿點云擬合
對點云聚類分析后,需對每個聚類結果進行擬合,得到掃描物的輪廓特征用于燈桿的識別。考慮到識別的對象是呈圓柱形,經(jīng)雷達掃描出的是一段圓弧(小于180°),如圖4所示。
本文采用Matlab對點云數(shù)據(jù)進行最小二乘法擬合[7]。該方法可以實現(xiàn)對每個聚類內(nèi)點集進行曲線擬合,而不用在整幅圖像內(nèi)實施IEPF算法和直線擬合,提高了實時性,并且避免了不同的聚類連接在一起的可能性。
在聚類內(nèi)部擬合出圓弧特征后,在燈桿識別過程中,根據(jù)擬合的圓弧直徑是否等于燈桿直徑排除廣告燈牌、樹木等圓柱形立柱,從而確定燈桿目標。
3 燈桿、燈罩的定位
在識別出燈桿輪廓后,根據(jù)雷達的點云數(shù)據(jù)確定燈桿的二維坐標,再由路燈的幾何尺寸,雷達在清洗平臺上的安裝位置,獲得燈罩的三維坐標,定位原理如圖5所示,其中,L1表示兩雷達在x軸方向的距離,L2表示燈桿長度,L3為燈罩懸臂長,θ為懸臂傾角,L4表示清洗車地盤高度,L5表示清洗平臺厚度,h為清洗平臺下表面到汽車底盤的距離,用于檢測平臺上升的高度。
激光雷達每次掃描采集到n個數(shù)據(jù)點,這些數(shù)據(jù)點的集合以極坐標形式表示為:
R={(ri,?i)|i=1,2,3,…n}
(3)
其中:ri為第n個點云的距離值,?i為第n個點云的角度值。根據(jù)公式(4)、(5)將點云的極坐標值轉化為直角坐標(xi,yi):
xi=ricos?i
(4)
yi=risin?i
(5)
因激光雷達位于原點X軸上,坐標為(L1,0,z),則確定燈桿軸心距雷達中心的距離為:
(6)
其中,min{r}是指代表燈桿的擬合曲線r的最小值,其對應角度記為?m。
燈桿軸心的坐標為(xg,yg):
xg=Lcos?m+L1
(7)
yg=Lsin?m
(8)
測高傳感器輸出高度為h,設燈罩形心的坐標為(xz,yz,zz):
xz=xg-L3cosθ=Lcos?m+L1-L3cosθ
(9)
yz=Lsin?m
(10)
zz=L2+L3sinθ-L5-L4-h
(11)
4 實驗與結果分析
為測試本文設計的路燈定位系統(tǒng)的精度,采用思嵐激光雷達進行實驗。由于本定位系統(tǒng)中燈罩的定位是根據(jù)清洗平臺、路燈的幾何尺寸、雷達安裝位置來計算得到,因此本實驗重點檢測燈桿的識別及定位,在路燈桿附近設置紙箱作為干擾來驗證該識別方法。
本實驗采集的點云如圖6(a)所示,燈桿目標位于雷達60°附近,圖6(b)為劃定的ROI區(qū)域中點云,它很大程度上減少了點云處理量,圖6(c)為點云聚類結果,圖6(d)為點云擬合結果。完成燈桿識別后,再通過式(9)-式(11),實現(xiàn)燈桿定位。實驗表明,本文設計的識別定位系統(tǒng)能準確地識別出燈桿,并且經(jīng)多次實驗,燈桿的定位誤差小于1 cm,滿足清洗過程對燈罩的定位要求。
5 結語
設計了一種基于激光雷達準確定位路燈燈罩的系統(tǒng),通過劃定識別的ROI區(qū)域,并對點云進行聚類、擬合處理,結合路燈燈桿的幾何特征,準確識別出燈桿,并通過路燈及清洗設備的幾何關系確定燈罩相對于清洗平臺的空間位置,為清洗裝置的舉升移動提供了可靠的技術支撐。實驗證明,該定位系統(tǒng)能夠滿足路燈清洗對于燈罩的定位要求。
