基于深度學習的微電網優化調度輔助決策方法
2022-03-08 12:23:36陳衛東吳寧黃彥璐馬溪原郭曉斌林冬
南方電網技術 2022年1期
陳衛東,吳寧,黃彥璐,馬溪原,郭曉斌,林冬
(1. 廣西電網有限責任公司電力科學研究院,南寧530013;2. 南方電網數字電網研究院,廣州510663)
0 引言
微電網技術作為一種提高分布式電源消納、多能源互補利用、以及提高供電可靠性的關鍵解決方案,已在南方電網范圍內加快推廣,在解決無電島、偏遠山區供電等方面應用潛力巨大,是南方電網公司“能源價值鏈整合商”轉型的重要組成部分[1 - 2]。
微電網的優化調度是保證微電網安全、可靠、經濟運行的重要手段,是微電網相關研究的熱點問題[3 - 4]。傳統的微電網優化調度通常基于最優化的理論和方法,首先對微電網內部各元件進行建模,然后對模型進行簡化和處理,最后研究相應的求解算法對模型進行求解。模型的目標函數一般為運行成本最小,也有相關研究綜合考慮經濟、環境以及社會效益建立多目標優化模型[5 - 6];常用的模型建模方法包括混合整數規劃[7 - 8]、動態規劃[9]、模型預測控制[10]、分布式優化[11]、李雅普諾夫優化[12]等;常用的模型求解算法包括遺傳算法[13]、粒子群算法[14]、主動進化算法[15]、拉格朗日松弛法[16]等。近年來,隨著風機、光伏等可再生能源的高比例接入,微電網的運行不確定性顯著加大,如何應對不確定性因素成為微電網優化調度的難點問題。此類問題常用的解決辦法是將不確定性問題轉換成確定性問題進行建模求解,主要包括基于場景的隨機優化[17 - 18]、機會約束優化[19]、魯棒優化[20 - 21]等,但這些方法均存在一定的局限性,如隨機優化計算量較大、魯棒優化過于保守等,而且微電網系統運行不確定因素較為復雜時,其概率建模較為困難。
目前,微電網正逐步演變為具有開放性、不確定性和復雜性的新型系統,強間歇性可再生能源高比例接入、高滲透率電力電子裝備、多能源耦合等新模式對微電網的物理特性及運行控制產生重要影響,上述傳統模型驅動的建模求解方法已難以滿足需求,主要體現在:
1)微電網各元件的精細化建模較為困難,簡化模型難以描述元件實際運行的物理特性,導致優化結果可能是次優的;
2)所建立的模型一般是非線性非凸的,其本身求解是典型的非確定性多項式難題(non-deterministic polynomial hard,NP-hard),求解效率較低;
3)模型的建立需要依據拓撲結構和運行方式完成,對拓撲結構的變化以及新型電力設備接入的適應性不強;
4)基于“離線計算、在線匹配”的預案式控制難以適應復雜多變的系統工況。
5)不能充分利用所積累的歷史決策數據信息。
此外,南方電網公司正在向“能源價值鏈整合商”轉型,將有可能運維數以萬計的微電網,傳統的基于人工值守的調度模式將難以適應這種新形態和新業態的出現。人工智能是新一輪科技革命和產業變革的重要驅動力量,研究其在系統調度運行的應用有助于突破傳統解決方案的局限性。目前,深度學習等機器學習算法在系統優化調度中的應用主要集中在負荷預測方面,直接應用在系統調度決策的相關研究較少[22 - 25]。文獻[26]基于長短期記憶網絡,構建了面向機組組合問題的深度學習模型,通過歷史數據的訓練建立系統負荷與調度決策之間的映射關系,并以此進行機組組合決策,但所構建的網絡結構較為簡單,且缺乏對模型輸出結果的處理,導致調度決策很可能不滿足運行過程中復雜的約束關系。
面向人工智能在微電網自動運行調控領域的需求,針對傳統模型驅動、預案式控制、人工值守調度模式和方法的缺陷,本文提出基于深度學習的微電網自動運行調控模型和方法,該方法基于深度雙向長短期記憶網絡(bidirectional long-short term memory, Bi-LSTM),通過歷史運行數據的訓練,直接構建微電網系統運行場景與調度決策結果之間的映射關系,并提出模型輸出結果的處理原則,可實現微電網功率的快速平衡與經濟優化,該方法可以作為物理優化模型方法的輔助決策方法,解決了傳統微電網運行優化調控模型求解效率低、難以適應復雜多變運行工況等難點問題,提升了微電網調度運行的智能化程度。
1 微電網日前優化調度典型數學規劃模型
1.1 目標函數
微電網日前優化調度的目標是一天內系統的總運行成本最低。系統的總運行成本包括微型燃氣輪機等可控分布式發電機組的燃料成本和啟動成本、儲能電池的充放電成本以及微電網與大電網之間的購售電成本,具體可表示為:
(1)
(2)
式中:T為調度周期;N為可控機組的數量;CFuel,i,t和CSU,i,t分別為可控機組i在時段t的燃料成本和啟動成本;CES,t為儲能電池在時段t的充放電成本;CGrid,t為微電網與大電網在時段t的購售電成本;ai、bi、ci為可控機組i的燃料成本系數;SUi為可控機組i的啟動成本;KES為儲能電池的單位充放電成本;pt為電網在時段t的電價;PG,i,t為可控機組i在時段t的出力;Pcha,t和Pdis,t分別為儲能電池在時段t的充電功率和放電功率;PGrid,t為微電網與大電網在時段t的交換功率,其中,PGrid,t>0表示微電網從大電網買電,反之為微電網向大電網賣電;non,i,t和nsu,i,t分別為指示機組運行和啟動狀態的二進制變量,non,i,t=1表示可控機組i在時段t處于運行狀態,反之non,i,t=0;nsu,i,t=1為可控機組i在時段t啟動,反之nsu,i,t=0。ηcha、ηdis分別為儲能電池的充電效率和放電效率。
1.2 約束條件
微電網日前優化調度模型的約束條件包括系統功率平衡約束、可控機組運行約束、儲能電池運行約束、微電網與大電網間聯絡線的功率約束等等,具體可表示如下。
1.2.1 系統功率平衡約束
微電網優化調度必須保證系統功率實時平衡,如式(3)所示。
(3)
式中:PLoad,t為系統在時段t的負荷;PWT,t和PPV,t分別為風機和光伏在時段t的預測出力。等式右側為系統的凈負荷,表征微電網的運行工況,等式左側變量為微電網日前優化調度的決策變量。
1.2.2 可控機組運行約束
可控機組運行約束包括可控機組的出力約束、爬坡約束、最小運行時間和停運時間約束以及機組的狀態指示變量約束等,如式(4)—(12)所示。
PG,i,min·non,i,t≤PG,i,t≤PG,i,max, ?i,t
(4)
-Pi,RD≤PG,i,t-PG,i,t-1≤Pi,RU, ?i,t
(5)
nsu,i,t-nsd,i,t=non,i,t-non,i,t-1, ?i,t
(6)
nsu,i,t+nsd,i,t≤1, ?i,t
(7)
UTi=min{T,(Ton,i-Ion,i)·non,i,0}
(8)
DTi=min{T,(Toff,i-Ioff,i)·(1-non,i,0)}
(9)
non,i,t=non,i,0,t≤UTi+DTi,?i
(10)
(11)
(12)
式中:PG,i,min和PG,i,max分別為可控機組i的最小出力和最大出力;Pi,RD和Pi,RU分別為可控機組i的最大下調出力和最大上調出力;nsd,i,t為指示機組停運狀態的二進制變量,nsd,i,t=1表示可控機組i在時段t停運,反之nsd,i,t=0;UTi為0時刻初始狀態為運行狀態時的持續時間,DTi為0時刻初始狀態為停機狀態時的持續時間;Ton,i和Toff,i分別為可控機組i的最小運行時間和最小停運時間;Ion,i和Ioff,i分別為可控機組i的初始運行時間和初始停運時間;non,i,0為可控機組i在0時刻的運行狀態。
1.2.3 儲能電池運行約束
儲能電池運行約束包括儲能電池的充放電狀態約束、充放電功率約束、儲能電池容量約束、調度周期內儲能平衡約束等等,如式(13)—(18)所示。
ncha,t+ndis,t≤1, ?t
(13)
0≤Pcha,t≤Pcha,max·ncha,t, ?t
(14)
0≤Pdis,t≤Pdis,max·ndis,t, ?t
(15)
EES,t=EES,t-1+Pcha,t·ηcha-Pdis,t/ηdis, ?t
(16)
Ec·socmin≤EES,t≤Ec·socmax, ?t
(17)
(18)
式中:ncha,t和ndis,t為指示儲能電池充放電狀態的二進制變量,ncha,t=1表示儲能電池在時段t充電,反之non,i,t=0;ndis,t=1表示儲能電池在時段t放電,反之nsu,i,t=0;Pcha,max和Pdis,max分別為儲能變流器的最大充放電功率;EES,t為儲能電池在時段t的容量;Ec為儲能電池的最大容量;socmax和socmin分別為儲能電池的最大、最小荷電狀態。
1.2.4 聯絡線功率約束
-PGrid,max≤PGrid,t≤PGrid,max, ?t
(19)
式中PGrid,max為微電網與大電網聯絡線允許交換的最大功率。
上述模型是一個混合整數非線性規劃模型,求解效率相對較低。為了提高模型的求解效率,需要對微電網內各元件的精細化數學模型進行簡化處理,使得模型的求解精度下降,進而導致所優化出來的結果可能是次優的,甚至是不可行的。此外,模型驅動的微電網調度決策方法忽視了歷史調度決策結果對未來調度決策結果的指導意義,模型和算法一旦確定,針對任一場景的微電網優化調度問題,其求解精度和計算效率都不會改變。
2 微電網日前優化調度的深度學習模型
針對模型驅動的微電網優化調度模型的技術難點與缺陷,本文提出一種基于深度Bi-LSTM的微電網日前優化調度輔助決策方法,該方法通過海量歷史數據的訓練,直接構建微電網運行場景與決策結果之間的映射關系,可實現微電網日前功率的快速平衡與輔助決策。
2.1 Bi-LSTM神經網絡的基本結構單元
長短期記憶網絡LSTM由瑞士人工智能科學家Jürgen Schmidhuber在1997年提出[27],是一種特殊的循環神經網絡,廣泛應用于序列預測、自然語言處理等任務中。
LSTM通過新增記憶單元,同時引入輸入門、遺忘門和輸出門等門控單元控制信息的遺忘與刷新,可有效解決循環神經網絡在長序列訓練過程中出現的梯度彌散和梯度爆炸問題,適用于處理時間序列較長的數據信息,其基本結構單元如圖1所示。
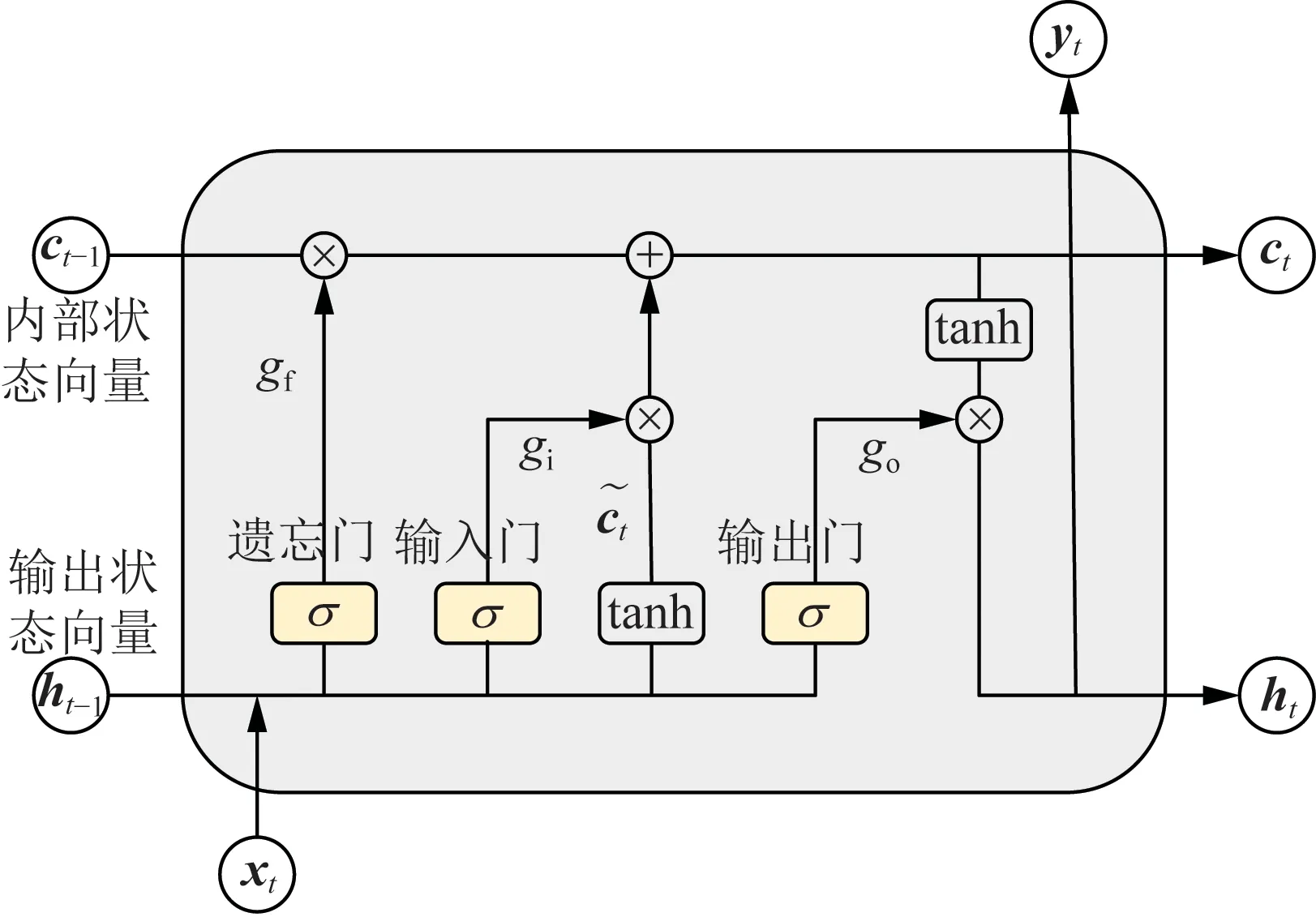
圖1 LSTM的基本結構單元
LSTM基本結構單元的前向傳播過程如式(20)—(25)所示。
gf=σ(Wf[ht-1,xt]+bf)
(20)
gi=σ(Wi[ht-1,xt]+bi)
(21)
go=σ(Wo[ht-1,xt]+bo)
(22)
(23)
(24)
yt=ht=go° tanh(ct)
(25)

由LSTM的基本結構單元可見,在每個時間戳t,LSTM只能提取當前輸入和過去時間序列的特征信息,忽略了未來時間序列的特征信息。而Bi-LSTM在隱層同一時間戳同時包含一個正向LSTM和一個反向LSTM,并且二者都連接著一個輸出層,這樣的結構提供給輸出層輸入序列每一個時間戳完整的過去和未來的上下文特征信息,在豐富模型表達能力的同時,并沒有增加對數據量的要求。Bi-LSTM的基本結構單元如圖2所示。
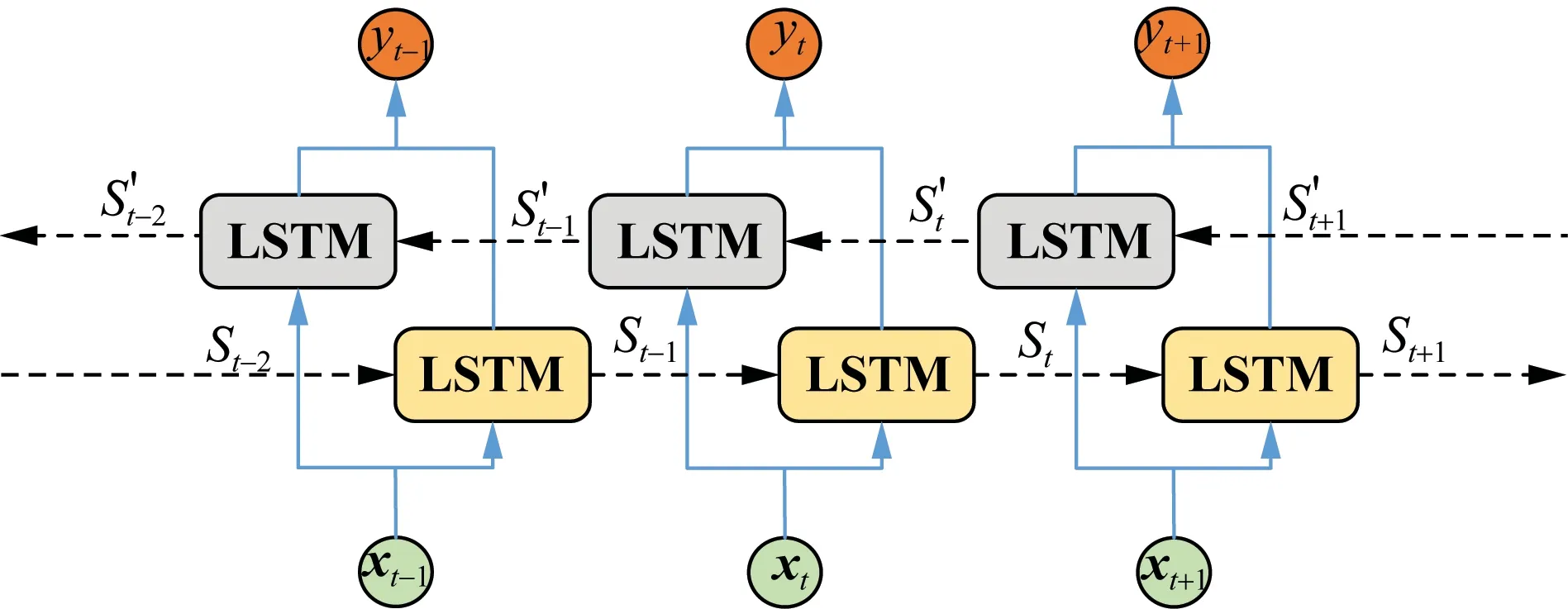
圖2 Bi-LSTM的基本結構單元
微電網系統負荷預測數據以及調度決策信息是典型的具有時間先后順序的序列數據,且微電網日前優化調度周期較長,采用擅長處理較長時間序列數據的LSTM進行輸入輸出映射關系的學習較為合適。此外,微電網日前優化調度決策需要滿足可控機組爬坡約束(5)、最小運行和停運時間約束(11)—(12)、儲能電池容量與充放電功率關系約束(16)等時間耦合約束,使得微電網當前時段的調度決策結果受過去和未來時段風機出力、光伏出力以及負荷的運行工況的影響。因此,選擇Bi-LSTM神經網絡構建微電網日前優化調度的深度學習模型更能有效提取微電網運行工況的特征信息,進而可以更準確地描述微電網運行場景與調度決策結果之間的映射關系。
2.2 基于深度Bi-LSTM神經網絡的微電網日前優化調度輔助決策方法
基于深度Bi-LSTM神經網絡的微電網日前優化調度模型通過海量歷史數據的訓練,構建微電網運行場景與調度決策結果之間的映射關系,進而針對風電、光伏、負荷任一場景的日前預測數據即可直接映射出相應的調度決策結果,具體網絡模型和詳細的決策流程如圖3所示。

圖3 網絡模型和決策流程示意圖
由圖3可見,微電網日前優化調度的深度學習模型由雙層Bi-LSTM神經網絡構成,其中,第1層Bi-LSTM的輸出作為第2層Bi-LSTM神經網絡的輸入;整體模型的輸入為日前24時段的系統凈負荷,可由日前24時段風機、光伏以及負荷的預測數據得出;整體模型的輸出為日前24時段的調度決策結果,具體包括每臺可控機組各時段的出力大小、儲能電池各時段的充放電功率以及微電網與大電網聯絡線的交換功率。
在進行網絡訓練之前,需要將訓練樣本數據進行歸一化處理。具體地,系統凈負荷數據以及可控機組出力數據歸一化到[0,1]之間,儲能電池的充放電功率以及微電網與大電網聯絡線的交換功率歸一化到[-1,1]之間,如式(26)—(31)所示。
Pnet,t=PLoad,t-PWT,t-PPV,t
(26)
Pes,t=Pdis,t-Pcha,t
(27)
(28)
(29)
(30)
(31)
式中:Pnet,t為系統在時段t的凈負荷;Pes,t為儲能電池在時段t的充放電功率,Pes,t>0表示放電,反之表示充電;Pnet,t0、PG,i,t0、Pes,t0、PGrid,t0分別為系統凈負荷、可控機組出力、儲能充放電功率以及微電網與大電網聯絡線交換功率的歸一化值。
本文采用Adam優化算法[28]來進行雙層Bi-LSTM神經網絡的訓練,選取均方誤差(mean squared error, MSE)作為損失函數,MSE的表達式以及Adam算法的權重更新公式如式(32)—(35)所示。
(32)
(33)
(34)
(35)

值得注意的是,基于深度學習的微電網日前優化調度輔助決策方法不研究優化調度的內在機理,所輸出的調度決策結果很可能不滿足微電網系統功率平衡約束以及各元件的運行約束等,因此,需要對網絡輸出的結果進行相應處理,具體的處理原則如下。
1)若模型輸出的可控機組出力小于0.5倍最小技術出力,則認為可控機組出力為0;若模型輸出的可控機組出力在0.5倍最小技術出力與最小技術出力之間,則認為可控機組出力為最小技術出力;
2)若模型輸出的可控機組出力、儲能充放電功率以及聯絡線交換功率數值超過上限,則輸出值取為上限;
3)若模型輸出的可控機組相鄰兩個時段的出力不滿足機組上下爬坡約束,則可控機組下一時段的出力等于上一時段的出力加上(減去)最大上調(下調)出力;
4)若模型輸出的可控機組各時段運行狀態不滿足最小運行和停運時間約束,則未滿足最小運行(停運)時間的時段,可控機組出力為最小技術出力(0);
5)若模型輸出的儲能電池各時段運行容量不滿足容量約束,則不滿足容量約束的時段根據最大(小)荷電狀態確定儲能的充(放)電功率;
6)儲能電池調度周期最后一個時段的充放電功率數值取決于調度周期其他所有時段充放電功率的總和,以滿足調度周期內儲能平衡約束;
7)微電網與大電網聯絡線各時段的交換功率取決于當前時段系統凈負荷、可控機組出力以及儲能充放電功率,以滿足系統功率平衡約束。
應按照原則的先后順序依次對網絡的輸出結果進行處理:先處理不等式約束,后處理等式約束;先處理元件約束,后處理系統約束。
此外,由圖3可見,本文微電網日前優化調度深度學習模型的訓練是隨著時間推移持續進行的,通過歷史輸入數據與輸出數據的積累可以實現對深度學習模型的持續修正,進而可以有效計及歷史調度決策結果對未來調度決策的指導意義,不斷提高微電網日前優化調度的求解精度與效率。因此,本文基于深度學習的微電網日前優化調度方法可以很好地作為模型驅動方法的輔助與備用。
3 算例分析
3.1 算例參數設置及測試系統描述
為了驗證本文所提方法的有效性,選取一個典型的并網型微電網系統進行仿真測試,并將測試結果與基于混合整數規劃的模型驅動的調度決策結果進行對比分析。該并網型微電網系統包含1臺風力發電機組、1臺光伏發電機組、儲能電池系統以及4臺微型燃氣輪機發電機組。其中,風機和光伏的裝機容量均為800 kW,儲能電池容量為3 600 kWh,初始電池容量為1 500 kWh,變流器最大充放電功率為500 kW,最大、最小荷電狀態分別為0.95和0.15,充放電效率設為0.95,單位充放電成本為0.08 元/kWh,4臺微型燃氣輪機發電機組的技術成本參數如表1所示,該系統與大電網聯絡線交換的最大功率為1 000 kW,日前交易的分時電價如圖4所示。

表1 微型燃氣輪機技術成本參數

圖4 日前分時交易電價
本文基于Python 3.7的Tensorflow 2.0 深度學習框架完成基于深度Bi-LSTM神經網絡的微電網日前優化調度模型的構建、訓練與評估。網絡離線訓練所需的輸入數據為風機、光伏和負荷的日前預測數據,來源于歐洲開放的電力系統數據平臺OPSD[29],輸出標簽數據為基于混合整數規劃的模型驅動的調度決策結果,包括日前24時段的4臺微型燃氣輪機機組的出力、儲能充放電功率以及與電網交換的功率。選取500個訓練樣本進行深度Bi-LSTM神經網絡的訓練和測試,其中前450個訓練樣本作為訓練集,后50個訓練樣本作為測試集,如圖5所示。為減少神經網絡參數的數量,第1層Bi-LSTM的輸入為微電網系統的凈負荷,張量形狀為(24,1),第1層Bi-LSTM的輸出與第2層Bi-LSTM的輸入相同,張量形狀為(24,64),第2層Bi-LSTM的輸出為調度決策結果,張量形狀為(24,6),所建立的深度Bi-LSTM神經網絡需要訓練的總參數數量為37 200個,離線訓練的學習率設為0.01。

圖5 訓練集與測試集數據
微電網日前優化調度的混合整數規劃模型使用GAMS 24.4調用CPLEX 12.0求解器進行求解,算法相對間隙設為1%,上述仿真測試均在處理器為Intel Core i5- 1035G4 CPU @ 1.10 GHz, 1 498 MHz,內存為16 GB的環境下進行。
3.2 算法有效性分析
首先,將上述訓練集再次切分為訓練集和驗證集,選取前400個樣本作為訓練集用于訓練深度學習模型參數,后50個樣本作為驗證集用于在訓練過程中選擇合適的模型超參數,并判斷模型是否過擬合。其中,回合大小(Epoch)為500、批量大小(Batch)為10的深度Bi-LSTM模型的訓練過程如圖6所示。

圖6 網絡模型的訓練過程
由圖5可見,在訓練了500個回合之后,模型接近于收斂,訓練誤差低于0.005,訓練準確率達到了0.8,此時驗證誤差為0.01,驗證準確率為0.83,訓練誤差和驗證誤差都很低,訓練準確率和驗證準確率接近,說明所訓練好的網絡模型并沒有出現欠擬合或者過擬合的現象。另外,在訓練200個回合之后,驗證誤差基本不再下降,驗證準確率不再上升,可以認為此時模型達到了最佳狀態,可提前終止網絡模型的訓練。
利用訓練好的網絡模型結合測試集中50個場景的風機、光伏以及負荷的預測數據進行微電網日前優化調度決策,并采用本文第2節中網絡輸出結果的處理方法對調度優化結果進行修正,即可得出測試集50個場景的基于深度學習的微電網優化調度決策結果。其中,前2個場景的微電網優化調度決策結果如圖7所示。

圖7 基于深度學習的微電網日前優化調度決策結果
由圖7可見,基于深度學習的微電網日前優化調度模型可直接根據風機、光伏、負荷的日前預測數據映射出微電網的日前優化調度結果,其決策時間十分短,可實現微電網系統功率的快速平衡。另外,采用本文方法得出的調度決策結果較為合理,具體表現在:1)儲能電池在系統凈負荷低谷時充電,在系統凈負荷高峰時放電;2)在電網峰時電價時段(時段21和時段46),微電網向大電網售電;3)運行成本最低、啟動成本最高的機組4在大部分時段保持運行狀態,不頻繁啟動,運行成本和啟動成本相對較低的機組2在系統凈負荷高峰時啟動以維持微電網系統的功率平衡。
為了進一步驗證本文方法的有效性和準確性,將基于本文方法與基于混合整數規劃模型以及基于深度置信網絡[25]得出的調度決策結果進行對比,測試集前10個場景的計算決策時間和系統總運行成本的對比結果分別如表2和圖8所示。

表2 3種方法計算時間的對比結果

圖8 3種方法系統總運行成本的對比結果
由表2可見,深度學習方法的計算求解時間遠低于模型驅動方法,且深度學習方法的計算結果是通過輸入輸出的映射關系得到的,不會隨著模型復雜度的增大導致計算求解時間大幅上升。此外,由圖8可見,由于在日前優化調度中,本文將模型驅動算法的計算結果作為訓練目標樣本進行深度Bi-LSTM神經網絡的訓練,使得本文方法得出的系統總運行成本略高于模型驅動方法優化出的系統總運行成本,但結果十分接近,平均誤差僅為1.42%,而基于深度置信網絡方法得出的系統總運行成本平均誤差為4.84%,可以驗證本文方法的有效性和準確性。
3.3 算法結果對比分析
首先分析不同的訓練樣本容量對于基于深度學習的微電網優化調度決策結果的影響,分別對比訓練樣本容量為50、100、150、200、250、300、350、400時深度學習模型和混合整數規劃模型在測試集的性能表現,測試集前10個場景的總運行成本以及測試準確率的對比結果如圖9所示。

圖9 不同訓練樣本容量的對比結果
由圖9可見,基于混合整數規劃模型驅動的調度決策結果與訓練樣本的容量無關,即歷史決策結果對未來決策結果沒有指導意義,一旦模型和算法確定,其計算效率和求解精度均不會改變。而深度學習模型的決策精度會隨著訓練樣本容量的增加而提高,在訓練樣本容量為50時,深度學習模型計算出的總運行成本為243 540.23元,與最優運行成本的相對誤差為3.35%,測試準確率為0.754 2;而當訓練樣本容量增加到400時,深度學習模型計算出的總運行成本為235 798.89元,與最優運行成本的相對誤差僅為0.07%,測試準確率提高至0.868 3。因此,深度學習模型可以計及歷史決策結果對未來決策結果的影響,在歷史數據不斷積累的過程中不斷對模型進行修正訓練,進而不斷提高模型的決策精度。
圖10對比了采用7種不同的神經網絡結構和類型訓練100個回合的訓練過程。可見,單層單向LSTM訓練的收斂過程較慢,雙層單向LSTM和3層單向LSTM訓練過程的波動性較大,較不穩定,而相比于單向LSTM,采用雙向LSTM訓練的收斂過程更快,同時也更穩定,雙層雙向LSTM與3層雙向LSTM的訓練效果類似,根據奧卡姆剃刀原理,選用雙層雙向LSTM構建基于深度學習的微電網日前優化調度模型最為合適。

圖10 不同網絡結構和類型的對比結果
最后,分析不確定性對該微電網系統實時在線優化調度決策結果的影響,不確定性的來源為系統內風機、光伏以及負荷的日前預測誤差。圖11對比了不同的預測誤差下分別采用本文算法和采用模型驅動算法進行調度決策平均運行成本。其中,本文算法在離線階段訓練好深度神經網絡并直接應用于在線決策;模型驅動算法在離線階段得到系統的預調度結果,實時的不平衡量通過考慮各元件的上下調裕度和成本進行再調度從而消除。由圖11可見,隨著預測誤差的增大,即不確定性的增大,本文算法的優勢逐漸增大,當預測誤差達到20%時,本文算法相對于模型驅動的算法平均運行成本下降了6.2%。這是由于本文算法基于大量的樣本進行訓練,訓練樣本的分布能夠自適應不確定性的變化;而模型驅動的算法由于難以對復雜的不確定性進行建模從而導致實時再調度成本的增加,證明了本文算法應對不確定性的效果更好。

圖11 不同預測誤差下兩種算法平均運行成本的對比結果
4 結論
針對模型驅動的微電網優化調度方法的局限性,本文提出了一種基于深度學習的數據驅動的微電網日前優化調度模型和輔助決策方法,通過算例分析,可得出以下結論。
1)基于深度Bi-LSTM神經網絡構建了微電網日前優化調度的深度學習模型,可以直接學習微電網運行場景與調度決策之間的映射關系,實現微電網日前功率的快速平衡與輔助決策;
2)提出了深度學習模型輸出結果的處理原則,可以有效解決調度決策結果可能不滿足系統硬性運行約束條件的問題;
3)基于深度學習的微電網日期優化調度模型可以充分利用歷史調度決策信息,通過歷史數據的積累,對模型持續地進行修正和訓練,進而不斷提高模型的求解精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
