漂浮體系懸索橋擬靜態縱向運動特性及其控制
2022-03-08 12:05:02梁龍騰封周權陳政清牛華偉華旭剛
地震工程與工程振動 2022年1期
梁龍騰,封周權,陳政清,牛華偉,華旭剛
(1.湖南大學風工程與橋梁工程湖南省重點實驗室,湖南 長沙 410082;2.湖南大學汽車車身先進設計制造國家重點實驗室,湖南 長沙 410082;3.廣東省交通規劃設計研究院集團股份有限公司,廣東廣州 510507;4.湖南大學重慶研究院 重慶 401133)
引言
隨著我國交通建設事業的快速發展,一大批大跨度懸索橋相繼建成。大跨度懸索橋多以漂浮體系或半漂浮體系為主,其優點是結構柔度大有利于抗震,缺點是縱向剛度小使得加勁梁容易在外部荷載作用下產生縱向運動[1-2]。因此學者們發現了大跨度懸索橋加勁梁縱向運動累積行程過大的現象[3-4],如矮寨特大懸索橋的加勁梁縱向運動單月累積行程超過4 km。加勁梁頻繁的縱向往復運動會引起連接構件的性能退化和疲勞損壞[5-8],如潤揚長江大橋通車5 年伸縮縫即部分部件疲勞損壞,江陰長江大橋的塔梁縱向流體粘滯阻尼器也因為漏油而性能退化[9]。這不僅提升了懸索橋的日常維護難度,也增加了地震防控的風險因素。明確漂浮體系懸索橋加勁梁縱向運動累積行程過大的成因,并找到有效的控制手段,對懸索橋健康安全運行十分必要。
國內外學者深入地研究了營運狀況下懸索橋加勁梁縱向運動的成因問題。Ni 等[10]基于健康監測系統數據研究了汀九橋溫度與主梁縱向位移之間的關系,研究發現加勁梁縱向運動位移與有效溫度之間存在很強的比例相關性。鄧楊等[11]研究了潤揚長江大橋160 日梁端位移響應與鋼箱梁溫度實測數據的相關性,結果表明單日的梁端位移變化曲線變化趨勢類似正弦曲線,而車輛荷載和風荷載引起的梁端位移運動表現為在位移變化趨勢線上下浮動的現象。李光玲等[12]建立風-隨機車流-鋼桁懸索橋分析系統,研究了某鋼桁懸索橋加勁梁伸縮縫在隨機車流作用下的縱向位移時程響應,結果表明在隨機車流作用下,加勁梁端伸縮縫處會產生不間斷的往復運動,且其累積行程與交通流量存在線性關系。Guo 等[13]建立五峰山長江大橋有限元模型,研究發現漂浮體系懸索橋加勁梁在豎向活載作用下會產生縱向位移,且豎向活載位于加勁梁1/4跨時位移最大。萬田保等[14]研究發現懸索橋加勁梁受到豎向非對稱荷載會產生的縱向位移,且豎向荷載作用在加勁梁不同位置時梁端縱向位移相差懸殊,并指出主纜縱向剛度是大跨度懸索橋縱向剛度的重要來源,豎向荷載作用下引起的加勁梁縱向位移是懸索結構受力特征的體現。綜上可知,目前針對漂浮體系懸索橋縱向運動的研究,主要是計算不同荷載下的縱向運動響應的正向問題,而基于實測位移時程研究各類荷載所產生的運動占比與貢獻的逆向研究并不多見。且目前僅有少量文獻關注縱向累積行程過大的問題。
學者們也對加勁梁縱向振動控制問題進行了相關研究。丁幼亮等[15]研究了風致抖振引起的主梁振動控制問題,采用液體粘滯阻尼器進行振動控制,減振效率可以達到50%左右。張宇峰等[16]在加勁梁梁端安裝阻尼器降低車致振動振幅,對改善伸縮縫的工作狀態起到了積極作用。張鑫敏等[17]提出在塔梁連接處設置靜力限位-動力阻尼裝置對虎門二橋坭洲水道橋的縱向運動進行控制,梁端位移幅值減小23.6%。可以發現,現階段加勁梁縱向振動控制研究主要以振動幅值作為評估指標,而以累積行程作為評估指標的文獻較為少見,實際上累積行程才是伸縮縫等梁端連接裝置疲勞破壞的根源。
文中以未安裝阻尼器狀況下的江陰長江大橋24 h 加勁梁縱向運動時程為基礎,采用EMD 和AMD 等信號處理方法將時程曲線分解為3 種不同頻譜特性的位移成分,并基于雨流計數法研究各位移成分在循環次數和累積行程中所占比例;研究了在累積行程占比高的擬靜態縱向運動成分的產生機理,并以產生機理為理論基礎,反演得到了等效豎向荷載時程;研究了擬靜態縱向運動的控制措施問題,提出了一種有效的控制方法。文中有助于進一步了解漂浮體系懸索橋縱向運動特性,也為漂浮體系懸索橋擬靜態縱向運動分析和累積行程控制提供理論基礎。
1 漂浮體系懸索橋縱向運動特性分析
1.1 研究背景
文中以江陰長江大橋作為研究對象。江陰長江大橋主跨跨徑1 385 m,矢跨比1/10.5,主纜中心距32.5 m,吊索間距16 m。加勁梁形式為扁平閉口流線型鋼箱梁,梁高3.0 m,梁寬36.9 m,是一座典型的漂浮體系懸索橋。健康監測系統在加勁梁南北兩端的上下游兩側分別布置1 臺,共4 臺位移傳感器采集加勁梁的縱向運動數據。上下游兩臺位移傳感器的間距為12 m,采樣頻率1 Hz,數據采集時間為24 h,如圖1 所示。該24 h位移時程數據為2006年3月30日未安裝塔梁間縱向阻尼器時所采集。
從圖1 可知,加勁梁同一端的兩臺位移傳感器采集的位移時程曲線整體運動趨勢基本一致。由于晝夜溫差導致的加勁梁縱向變形趨勢明顯,當白天溫度升高時加勁梁變長,南岸端往正向移動,北岸端往負向移動;而在晚上降溫時加勁梁縮短,南岸端往負向移動,北岸端往正向移動,兩端的整體移動趨勢剛好相反。
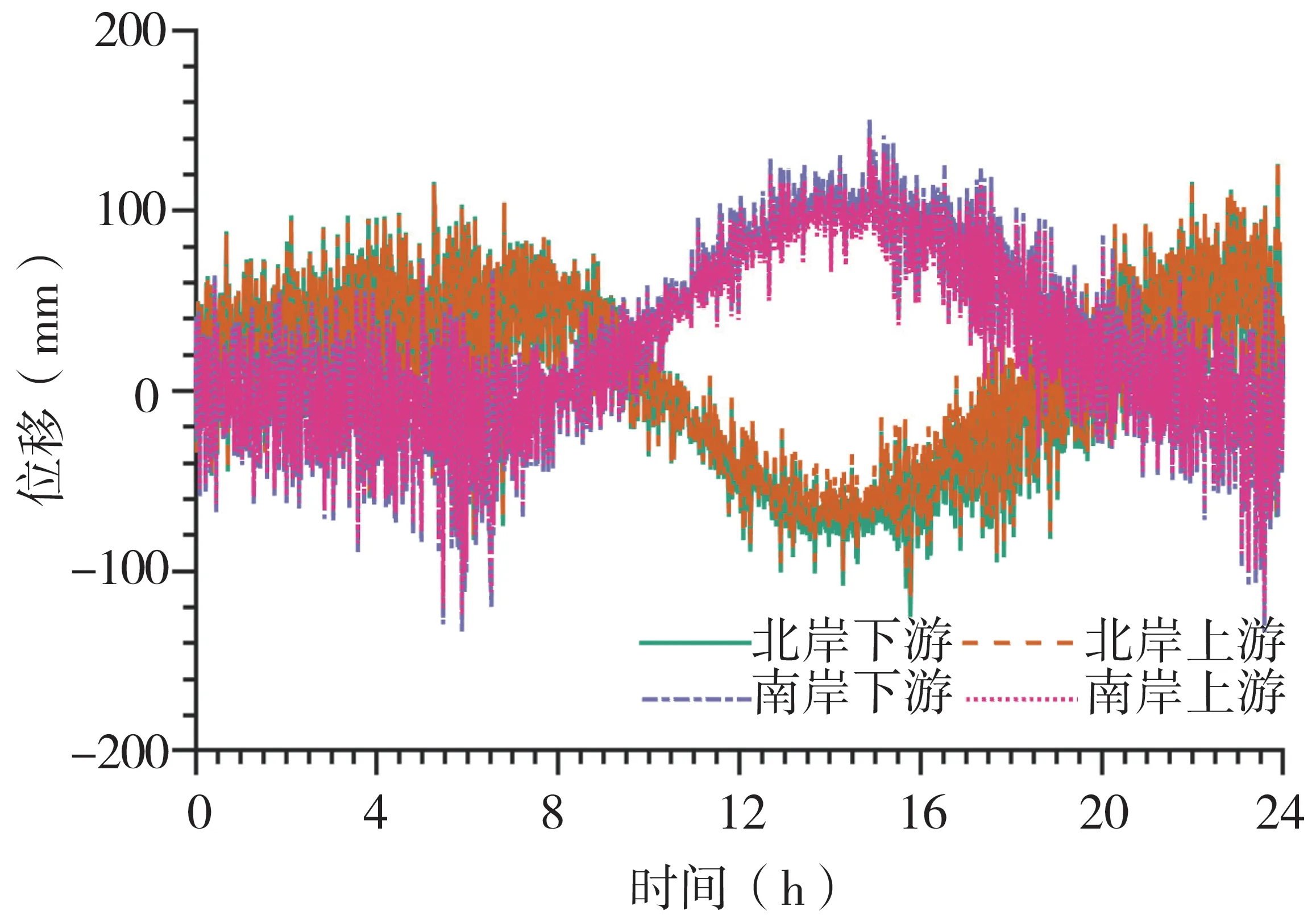
圖1 加勁梁縱向運動24 h位移時程曲線Fig.1 24 h measured longitudinal displacement of stiffening girder
1.2 頻譜特性
計算實測24 h加勁梁縱向運動位移時程曲線的功率譜密度(PSD)特性如圖2所示。將圖2中PSD曲線的縱向振動卓越頻率與Brownjohn[18]和Zhou[19]實測的江陰長江大橋的卓越頻率進行對比,驗證文中采用的實測位移時程曲線的準確性。這兩篇文獻中進行了全橋振動響應的實測和模態識別,包含豎彎模態和側彎模態。這里僅將與圖2前三階振動卓越頻率對應的模態提取出來進行對比,如表1所示。結果表明,文中縱向位移時程曲線的卓越頻率與文獻中的數據吻合良好,從側面證明文中的縱向運動時程曲線的真實性和準確性。
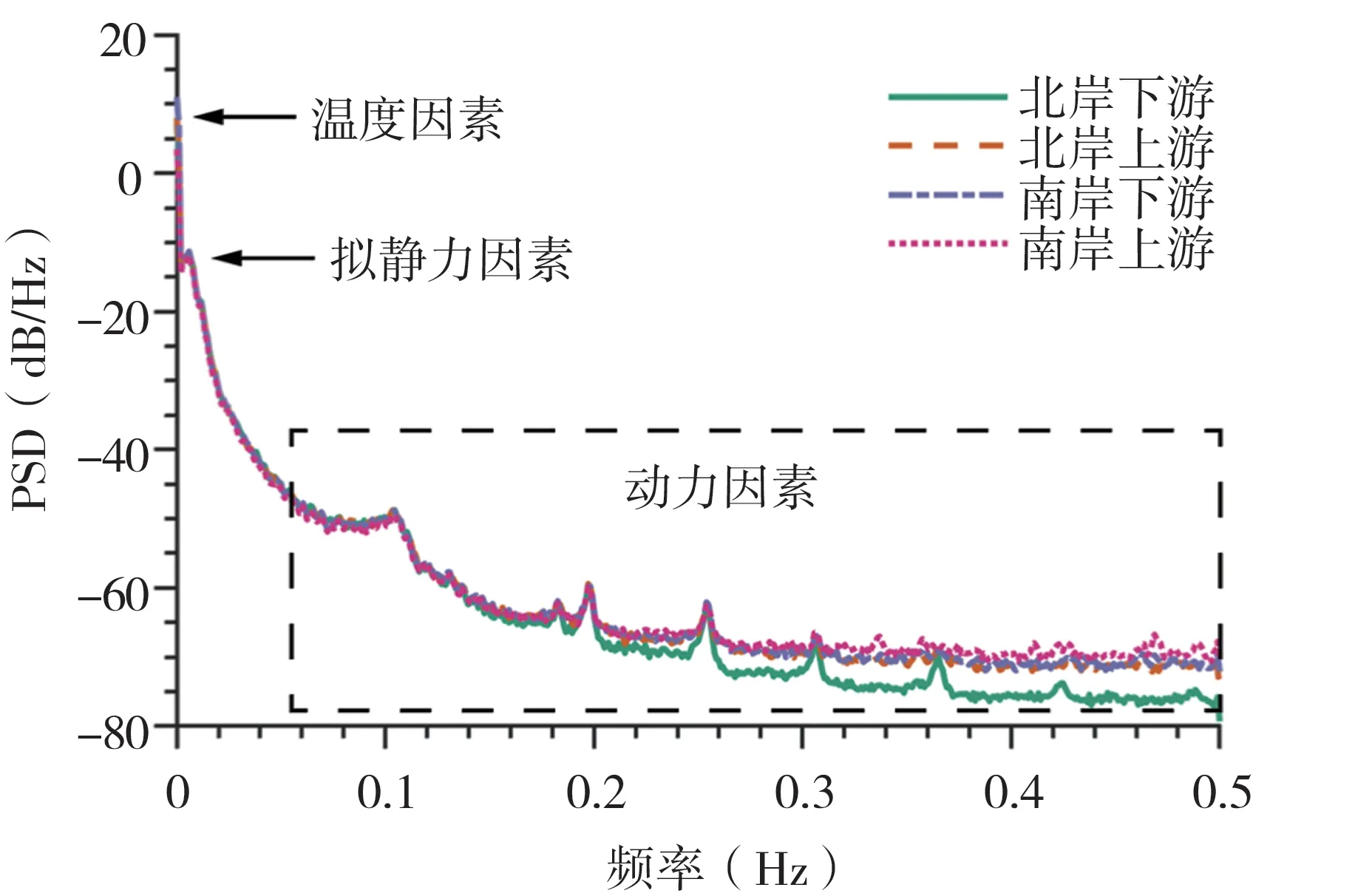
圖2 加勁梁縱向運動24 h位移時程頻譜特性Fig.2 Spectrum characteristics of 24 h longitudinal displacement of stiffening girder
結合圖2 與表1 可以發現,加勁梁的縱向運動從頻譜特性的角度可以分成3 個部分:第1 部分是晝夜溫差引起的加勁梁伸縮變形(以24 h為一循環,頻率為1/86 400 Hz=1.157×10-5Hz);第2部分是擬靜態因素引起的頻率遠小于一階縱向振動頻率的縱向往復運動(卓越頻率為0.005 9 Hz);第3部分為高于和等于一階縱向模態頻率的縱向振動響應(頻率≥0.104 Hz),對應由風荷載和車輛荷載等動力因素激勵引起的加勁梁縱向共振響應。為了控制加勁梁縱向運動,避免連接構件疲勞損壞,可以將位移時程按照頻譜特性進行分解,針對性的研究其控制方法。
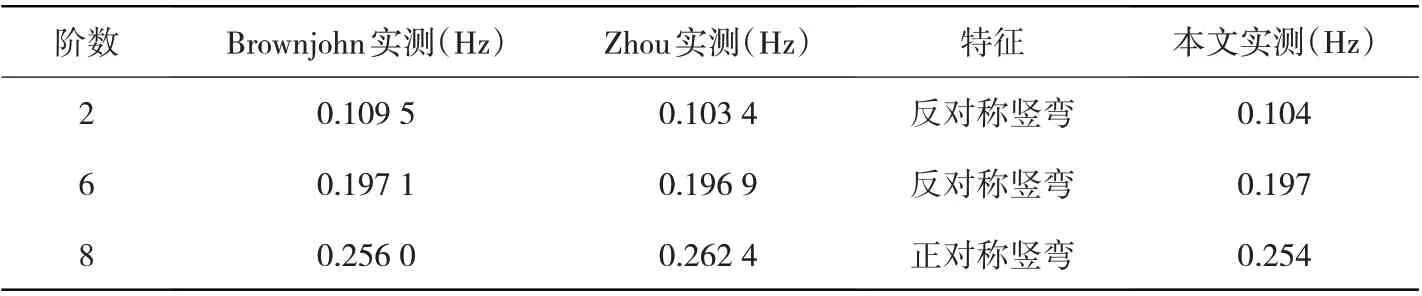
表1 實測卓越頻率對比Table 1 Comparison of measured spectral characteristics
1.3 信號分解
由晝夜溫度變化引起的加勁梁縱向運動,實際是材料熱脹冷縮引起的縱向位移,不作為縱向運動控制目標,所以首先需要將其從運動時程曲線中剝離出來。以北岸下游的位移時程曲線為例,采用EMD 方法進行分解,將提取出來的殘差與實測位移時程曲線對比,如圖3(a)所示。EMD方法是一種時域數據處理手段,EMD 分解信號得到IMF這個過程完全是依賴于信號本身的,是一個自適應的過程,同時是后驗的,并且能夠避免基于傅里葉變換分析導致的能量擴散、泄露等問題[20]。從圖3(a)可以發現,EMD 殘差為縱向位移一天內的總體趨勢,與溫度變化產生的梁端位移變化特性相符合。而所有本征模函數(IMF)之和曲線,如圖3(b),是移除了溫度變化位移的時程曲線,其頻譜特性曲線與實測時程曲線的頻譜特性進行對比,如圖3(c)所示。由圖可知,溫度引起的梁端位移變化可以視為周期是24 h的縱向運動,其頻率為1/86 400 Hz,很明顯可以看到該頻率成分已經被剔除。
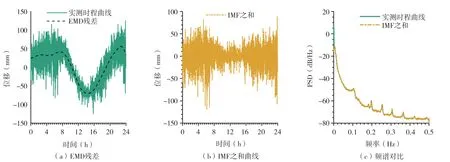
圖3 加勁梁位移時程曲線的EMD分解Fig.3 Decomposition of displacement time history of stiffening girder with EMD method
由1.2節內容可知,IMF之和曲線中包含了縱向振動響應和擬靜態縱向運動,為了分解兩種成分,這里引入AMD方法進行截斷處理,得到不同頻率特性的數據曲線。AMD方法是基于HHT的時域信號處理方法,避免了頻域加窗導致的信號失真的影響[21-22]。其基本原理為當信號x(t) =s1+s2,如果低頻成分s1與高頻成分s2的頻譜不重疊,則存在截斷頻率ωb使得,

式中:ωb數值大于s1的最高頻率且小于s2的最低頻率;H為希爾伯特變換。利用AMD 方法可以快速地將信號分解為低頻和高頻兩部分。
選擇0.02 Hz作為截斷頻率,將IMF之和的時程曲線分成2個部分,如圖4所示。觀察圖中的頻譜特性可以發現,IMF之和曲線以截斷頻率為界線分成了2條頻譜特性完全不同的位移時程曲線,分別對應加勁梁的擬靜態縱向運動和縱向振動響應,如圖5。
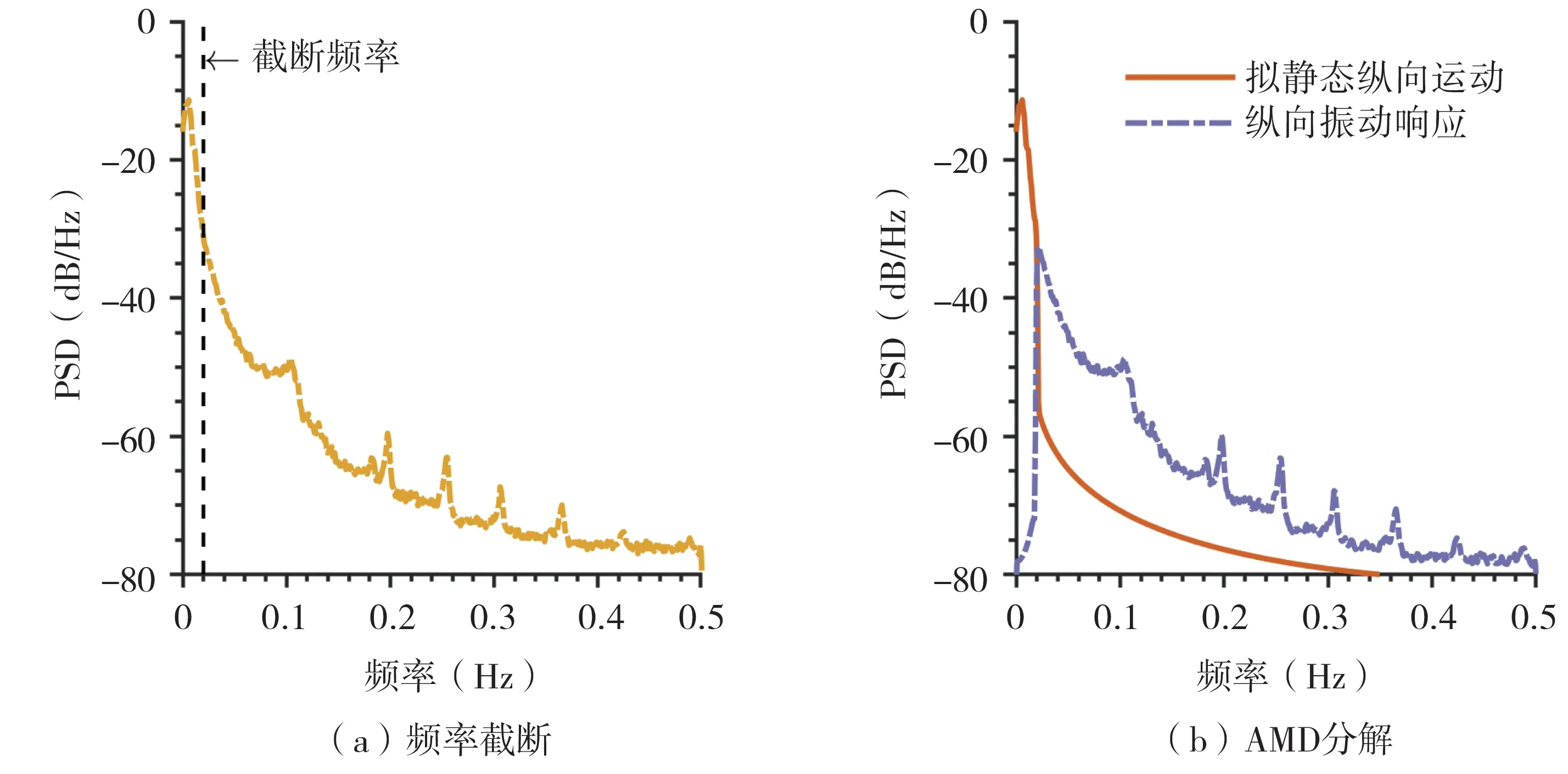
圖4 加勁梁位移時程AMD分解后的頻譜特性Fig.4 Spectral characteristics of displacement time history of stiffening girder after AMD
對圖5 中由AMD 方法分解得到的加勁梁位移時程曲線的運動幅值進行統計。擬靜態縱向運動位移時程中位移最大值為92.3 mm,最小值為-123.5 mm,行程范圍(最大值-最小值)為215.8 mm,位移標準差為23.9 mm;縱向振動響應位移時程的位移最大值為16 mm,最小值為-14.3 mm,行程范圍為30.3 mm,位移標準差為2.5 mm。可以發現,不同頻譜特性的加勁梁縱向運動成分,其往復運動的位移幅值、標準差等特性區別很大,擬靜態縱向運動的位移幅值和標準差均遠大于縱向振動響應。為了針對性的找到對不同特性的縱向運動的控制措施,需要進一步的分析其特性和影響。
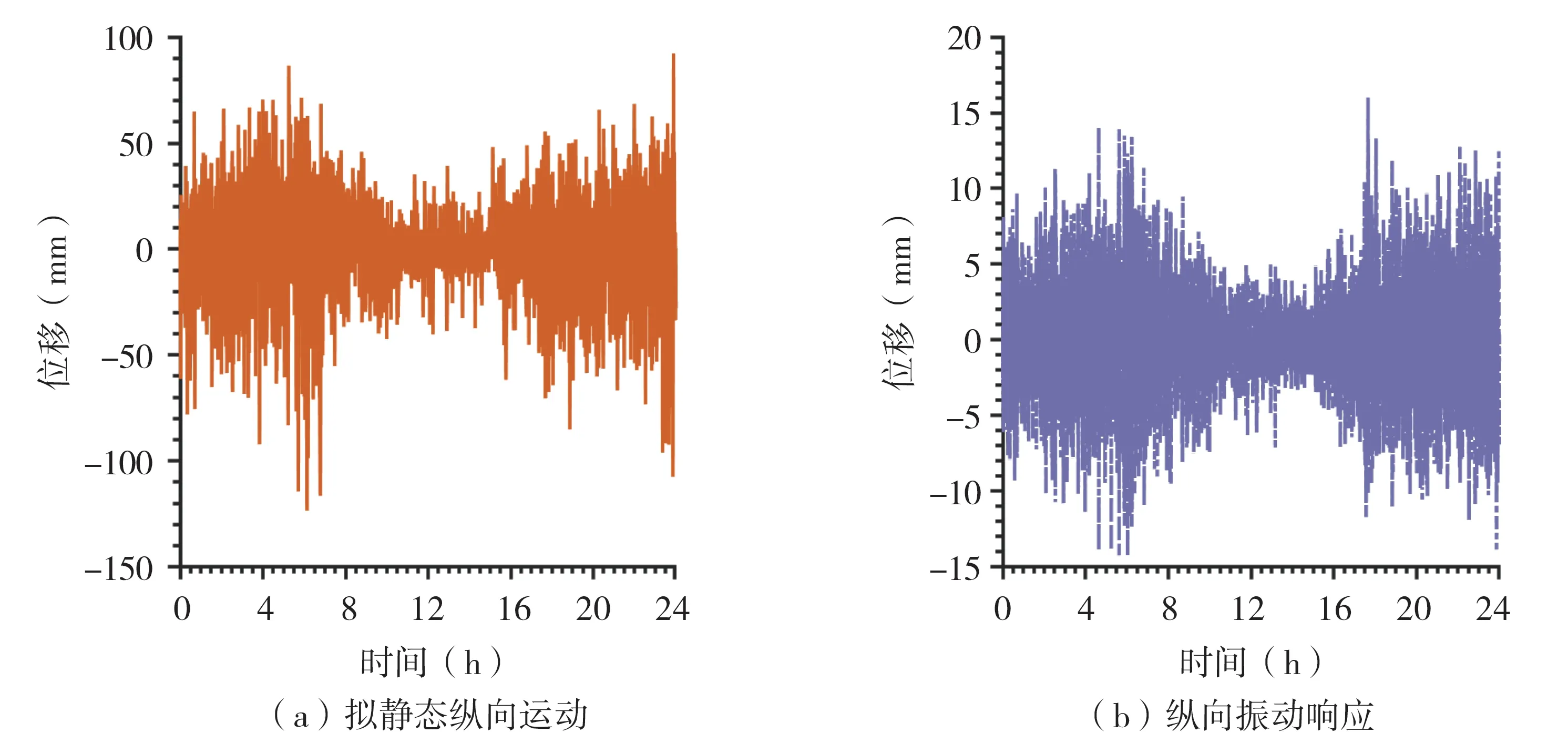
圖5 AMD分解后的加勁梁位移時程Fig.5 Displacement time history of stiffening girder after AMD
1.4 特性分析
利用雨流計數法對圖3(a)中實測位移時程曲線的峰峰值-循環次數特性進行統計。雨流計數法最早提出是在疲勞損傷領域,這個方法被用來統計隨機載荷的分布,通過建立隨機載荷的往復循環分布和其引起的結構應力-應變循環之間的關系,從而根據材料損傷理論分析應力-應變滯回曲線與結構損傷與破壞的關系。
統計位移時程曲線的峰峰值-循環次數特性的分布關系,如圖6所示,這里峰峰值的定義為單個運動循環的波峰與波谷之差。圖中將峰峰值以2 mm 作為單位區間進行統計,柱狀高度對應各峰峰值區間的循環次數。由圖可知,峰峰值在0~2 mm 區間的循環次數有8 034 次,數量最多;而隨著峰峰值越大對應的運動循環次數越少。結合上一節中兩種不同加勁梁縱向運動成分的特性,可以發現,擬靜態縱向運動的位移行程大,但是循環次數少,而縱向振動響應的位移行程小,但是循環次數多。
為了定量地給出兩種縱向運動成分所占比例,可將縱向振動響應位移時程曲線的行程范圍值30.3 mm作為分界線,行程幅值小于30.3 mm 的計入縱向振動響應,行程幅值大于30.3 mm 而小于215.8 mm 的計入擬靜態縱向運動。唯一幅值大于215.8 mm 的循環是由于溫度變化引起的位移循環。統計出循環次數和循環累積行程的占比,如圖6所示。可以發現,雖然縱向振動響應在循環次數中占據了95.91%,但是大幅值的擬靜態縱向運動在累積行程中占據了76.34%。

圖6 加勁梁實測位移時程的統計特性Fig.6 Statistical characteristics of measured longitudinal displacement of stiffening girder
由于隨機風荷載和車輛荷載引起的縱向振動響應可以通過安裝速度型阻尼器進行有效的控制,如梁龍騰等[23]提出用電渦流阻尼器進行懸索橋加勁梁縱向共振響應控制,收到了很好的效果。所以有效地控制住擬靜態縱向運動是避免加勁梁連接件的疲勞損壞和性能退化的關鍵。
2 擬靜態縱向運動成因分析
找到擬靜態縱向運動的成因不僅有助于理解懸索橋縱向運動,也能夠對后續的振動控制研究提供參考。本節通過建立江陰長江大橋的有限元模型,對擬靜態縱向運動的成因進行探索研究,見圖7所示。采用通用有限元軟件ANSYS建立模型,主塔和加勁梁采用Beam4 單元進行模擬,主纜和吊桿則采用Link10 單元進行模擬,模型共有節點945個,單元948個。
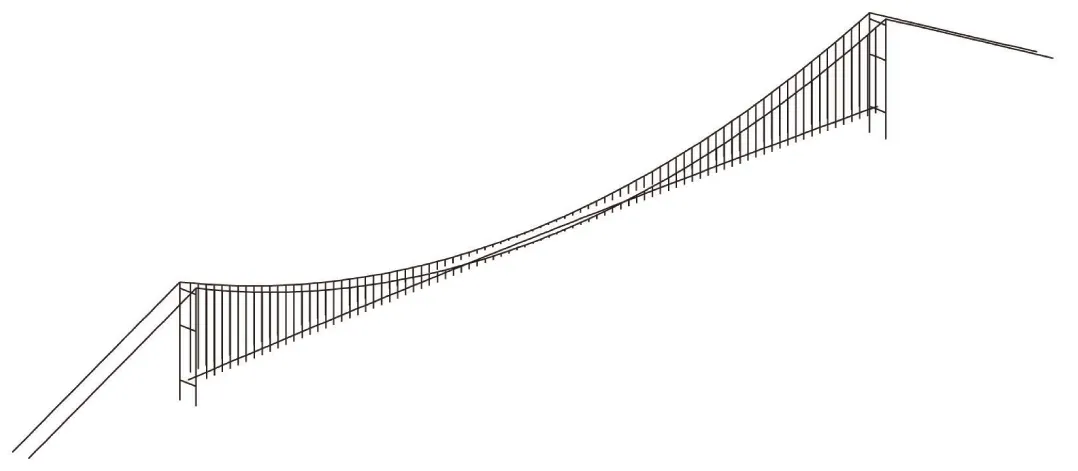
圖7 江陰長江大橋有限元模型Fig.7 Finite element model of Jiangyin Bridge
2.1 特性分析
車輛行駛在懸索橋加勁梁上,加勁梁受到車輛豎向荷載的作用。為了研究豎向集中力對加勁梁梁端縱向運動的影響規律,在加勁梁上1/4 處施加一個集中力如圖8 所示。通過調整變形比例因子,可以發現在豎向集中力的作用下,加勁梁不僅產生了豎向的位移,也出現了縱向的位移,縱向位移的出現是主纜、吊桿和加勁梁共同作用的結果。這種存在于橋上的不對稱豎向荷載就會引起加勁梁產生縱向運動,這與加勁梁的縱向共振位移響應的發生機制明顯不同。

圖8 擬靜態縱向運動成因Fig.8 Cause of quasi-static longitudinal motion
進一步的,當一個2 000 kN 的豎向集中力荷載由北往南依次加載在加勁梁的節點上,此時加勁梁兩端、跨中和南北1/4 跨5 個位置處的縱向位移,即5 個節點的影響線繪制如圖9,圖中負向為往北岸移動,正向為往南岸移動。由圖可知,5個點的運動趨勢基本一致,加勁梁在受到豎向的2 000 kN集中力的作用時出現整體的縱向移動;且當豎向集中力位于在1/4跨位置時,加勁梁的縱向位移最大。
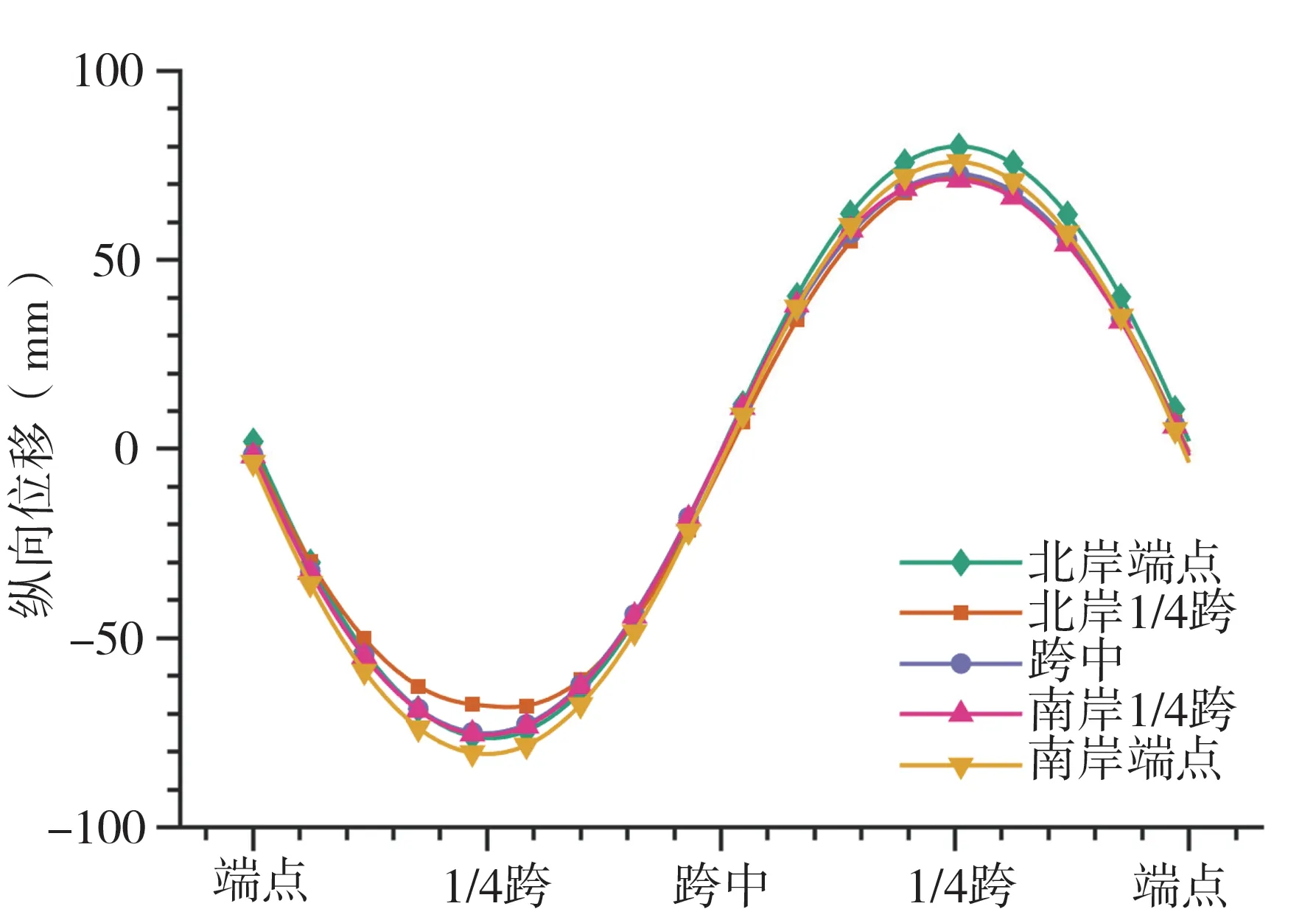
圖9 加勁梁節點的縱向位移影響線Fig.9 Longitudinal displacement influence line of stiffening girder nodes
懸索橋加勁梁上任意分布的豎向車輛荷載可以分解為正對稱分布和反對稱分布2 個部分,正對稱分布荷載由于兩者相互抵消不會產生加勁梁的縱向位移,文中所述的擬靜態縱向運動則是由豎向車輛荷載的反對稱分布部分造成的。為了簡便起見,按照加勁梁梁端位移相等原則,將不對稱車輛荷載因素簡化為一個加在懸索橋加勁梁1/4 跨處的等效豎向集中力。因為文中關注的重點為加勁梁的梁端縱向位移,其他構件的變形并不在文中的考察范圍,用一個豎向集中力進行等效,產生與實測數據相同的梁端擬靜態位移,可以簡化分析流程,且不影響分析結果。
同時,當一個集中荷載從橋的一端向另一端移動時,加勁梁完成一個縱向往復周期,周期與集中力過橋時間相等,當集中力以時速60 km 通過江陰長江大橋1 385 m 長的主跨時,加勁梁縱向運動頻率為0.012 Hz,與采集到的擬靜態縱向運動的卓越頻率0.005 9 Hz 較為接近。實際上的不對稱荷載分布是非常復雜的,可能由隨機分布的多輛重車造成。1.3 節采用AMD 方法進行數據分解時,選擇了0.02 Hz 作為截斷頻率,包含了時速100 km以下的不平衡豎向力運動,與實際情況相符。
2.2 等效集中力反演
雖然確認了擬靜態縱向運動的成因,并采用AMD 方法分解得到了位移時程曲線,但是無法借鑒加勁梁的縱向振動響應時程,基于其卓越頻率建立單自由度模型體系計算荷載時程曲線,從而進行振動控制評估的方法[18]。基于擬靜態縱向運動的形成機理,反演出等效豎向集中力荷載時程曲線,可以避免求解隨機車輛荷載過橋時程分析的難題,顯著降低擬靜態縱向運動控制研究的工作量。
以加勁梁南岸1/4 跨處作為加載點,施加大小為-3 000 kN 至3 000 kN 的豎向集中力,計算出豎向集中力與縱向位移的對應關系,如圖10。由圖10(a)可知,在豎向集中力作用下,加勁梁縱向運動趨勢一致,數值基本相等,說明采用單點加載的方法能夠很好的實現加勁梁的擬靜態縱向運動,而且位移范圍也涵蓋了擬靜態縱向運動-123.5 ~92.3 mm的行程范圍。仍然采用北岸端點的數據來進行多項式擬合,如圖10(b)。擬合計算得到多項式如式(2),
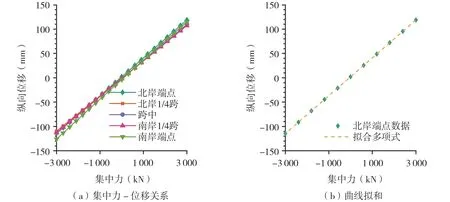
圖10 加勁梁擬靜態縱向運動的集中力-位移關系擬合Fig.10 Curve fitting of the relationship between vertical concentrated force and quasi-static longitudinal displacement

多項式擬合的R2系數為1,說明該多項式具有很高的擬合精度。
結合圖5(a)中的擬靜態縱向運動位移時程曲線和式(2)的集中力-位移關系式,就可以反演出加載在南1/4 跨處的等效豎向集中力荷載時程曲線,如圖11 所示。將等效豎向集中力輸入到懸索橋有限元模型進行時程分析,對比計算得到的有限元模型加勁梁北端節點的縱向位移時程曲線與實測得到的擬靜態縱向運動時程曲線(第3.5 至5.5 h),如圖11(b)。由圖可知,采用等效豎向集中力加載的方法可以有效還原實測分解得到的擬靜態縱向運動,采用該方法可以很方便地評估各類控制裝置對擬靜態縱向運動的控制效果。
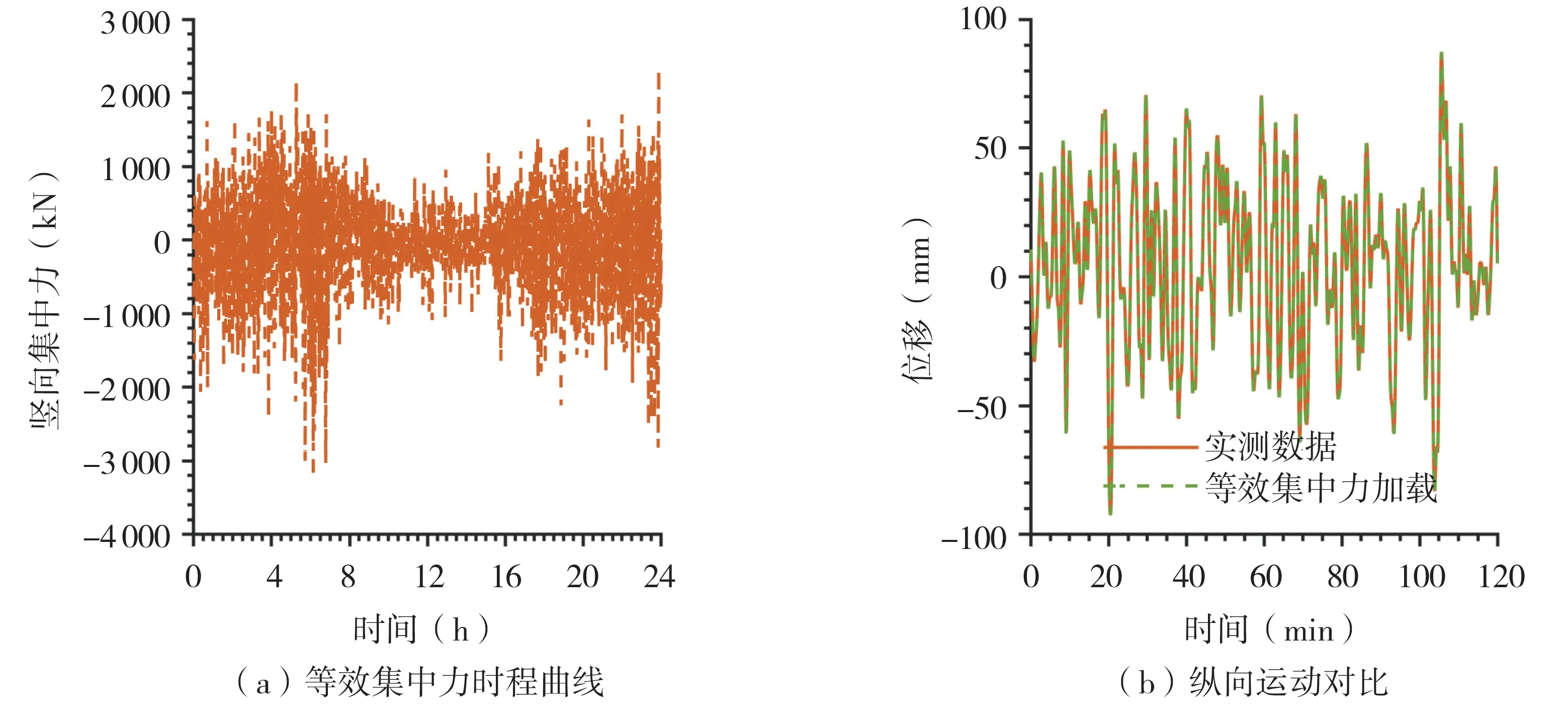
圖11 等效集中力的反演與驗證Fig.11 Identification and verification of equivalent force
3 擬靜態縱向往復運動控制分析
漂浮體系懸索橋加勁梁縱向運動中,溫度變化產生的變形位移需要進行釋放,避免出現巨大的溫度內應力;縱向振動響應成分通過安裝電渦流阻尼器提高阻尼系數可以進行有效的限制[18];文中對在累積位移中占比最大的擬靜態縱向運動的控制措施進行分析。通過在加勁梁與主塔橫梁的節點之間添加Combin37單元模擬速度型阻尼和極限摩擦力等控制措施,為了便于理解,這里定義控制率ρ,如式(3)來評估控制效果。

式中:DSUM為安裝控制裝置的累積行程;D0SUM為未安裝控制措施的累積行程。控制率越高,說明控制效果越好。
首先考慮增加阻尼系數對擬靜態縱向運動的控制效果,阻尼系數工況如表2,計算出各個工況下的加勁梁位移時程曲線,并計算出其累積行程,如圖12所示。可以發現,增大阻尼系數對加勁梁擬靜態縱向運動的控制效果并不理想,累積行程也沒有顯著的降低,阻尼系數提升到80 000 kN·s/m,累積行程的控制率也只僅為7.46%。這是由于阻尼系數和速度呈正比,當加勁梁運動保持低速度運動時,阻尼力也相對較小,無法有效的抑制擬靜態縱向運動。如果阻尼系數過大,阻尼器及其連接構件很容易因為其循環往復運動而出現疲勞損壞問題,同時阻尼器及其連接構件的制造成本也將大增。
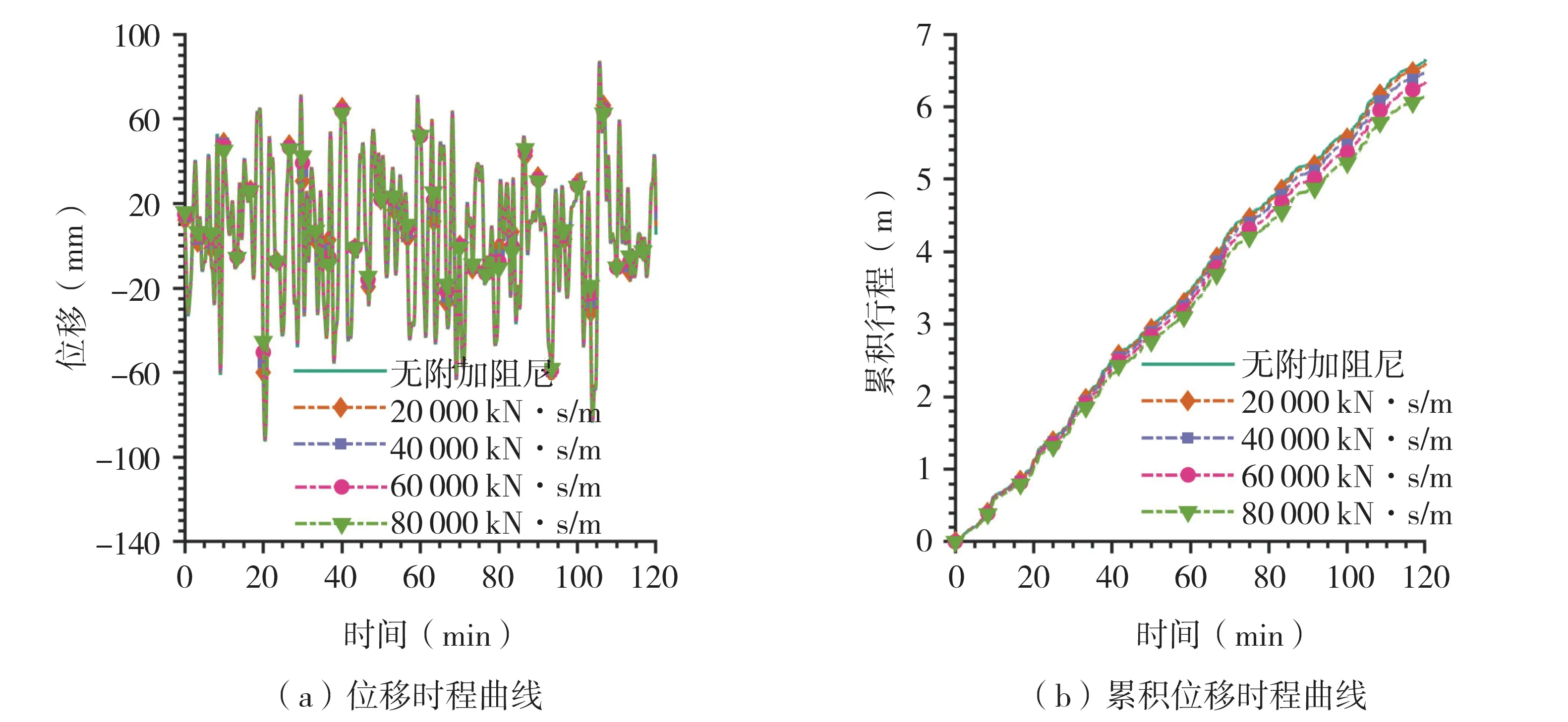
圖12 阻尼系數對擬靜態縱向運動的影響Fig.12 Influence of damping coefficient on quasi-static longitudinal motion
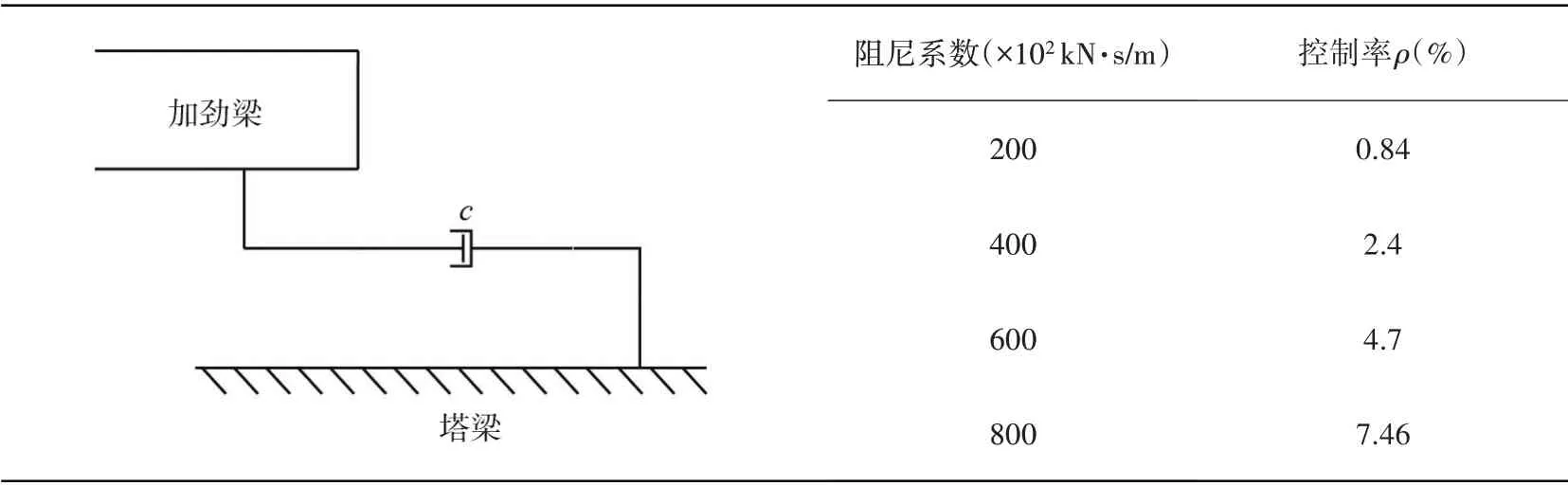
表2 阻尼控制工況表Table 2 Damping coefficient for different cases
這種現象在江陰大橋實際阻尼器的控制效果也得到了驗證。通過對比江陰長江大橋安裝阻尼器前后的位移時程曲線的頻譜特性,可以評估速度型阻尼對加勁梁縱向運動的控制效果。2007 年2 月江陰長江大橋安裝了4 臺流體粘滯阻尼器(阻尼系數1 522 kN/(m/s)0.3,速度指數0.3,最大阻尼力1 000 kN)來控制大橋的縱向運動。將 北 岸 上 游 側2007 年3 月30 日 和2006 年3 月30日的位移時程功率譜密度曲線繪制如圖13 所示。由圖可知,增加了粘滯阻尼器后,縱向振動響應部分得到了有效的控制,其卓越頻率處的幅值明顯下降;而擬靜態縱向運動部分的卓越頻率并沒有明顯的變化。這從實測的角度表明單獨采用速度型阻尼器無法有效地控制懸索橋加勁梁的擬靜態縱向運動。
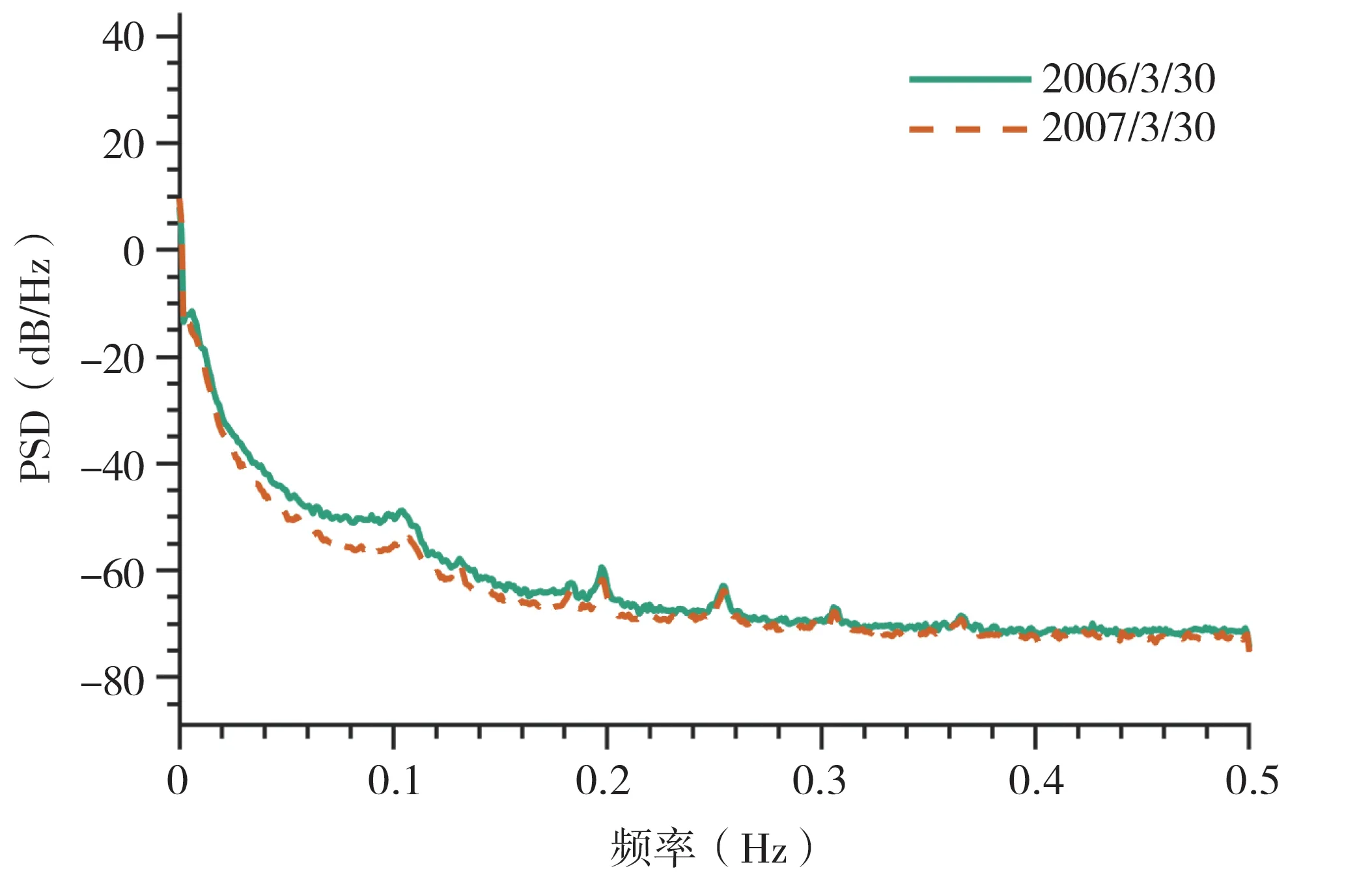
圖13 阻尼器安裝前后位移響應功率譜對比Fig.13 Comparison of displacement PSD before and after damper installation
為了提高低速狀況下的阻尼力,可以采用具有庫倫阻尼形式的摩擦阻尼器來控制擬靜態縱向運動,這里設計的極限滑動力Fs工況如表3,計算對應的位移響應時程,統計其累積位移如圖14 所示。由圖可知,摩擦阻尼能夠有效地抑制加勁梁的擬靜態縱向運動,隨著極限滑動力的增大,擬靜態縱向運動的累積行程逐漸減小;當極限滑動力為400 kN 時,對擬靜態縱向運動的控制率達到67.08%,遠優于提升阻尼系數的控制方法。同時發現,累積行程雖然隨著極限滑動力的增大而逐漸減小,但是控制率的增加速度逐漸放緩。
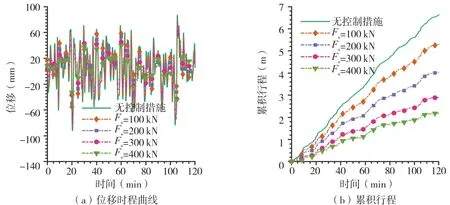
圖14 極限滑動力對擬靜態縱向運動的影響Fig.14 Influence of limiting sliding force on quasi-static longitudinal motion
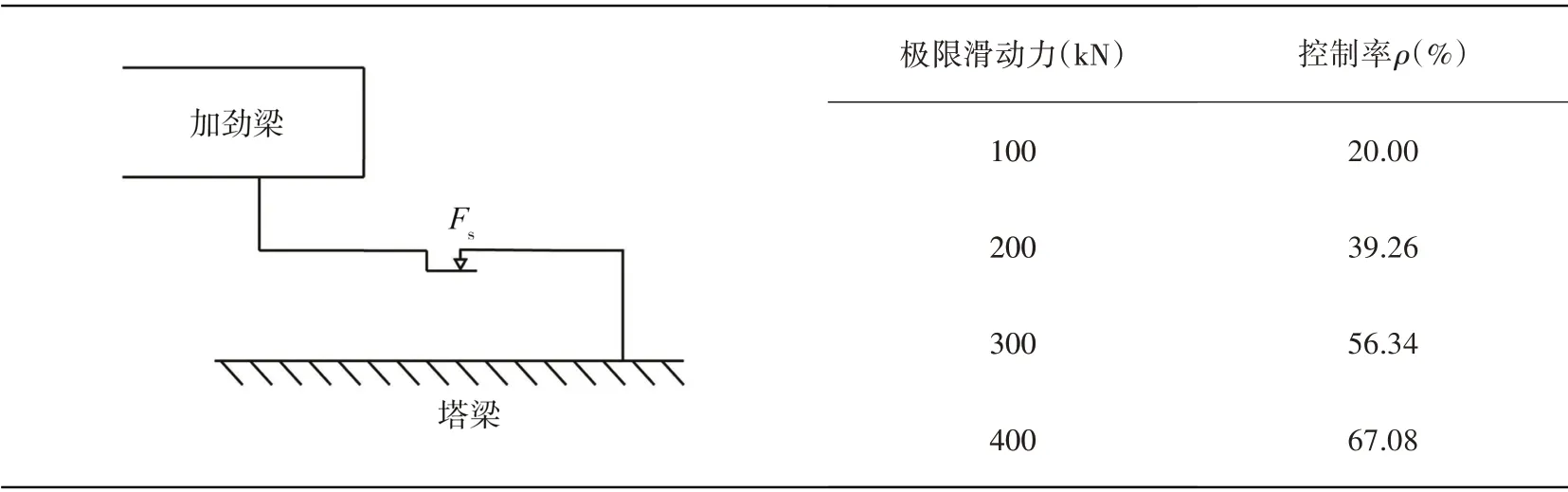
表3 極限滑動力工況表Table 3 Sliding force for different cases
進一步的,可將速度相關型阻尼和摩擦阻尼并聯組合應用在懸索橋加勁梁的縱向減振控制中,這樣可以同時具備高速時的速度相關阻尼特性和低速時的庫倫阻尼特性。采用并聯方案控制擬靜態縱向往復運動,設計的工況如表4,對應的控制率繪制如圖15所示。由圖可知,在不同阻尼系數的情況下,增加極限滑動力都可以有效的抑制擬靜態縱向運動的累積行程;同時,當極限滑動力確定,增大阻尼系數也在一定程度上能夠抑制累積行程的增長。另一方面,速度相關型阻尼可以非常有效的降低縱向振動響應成分,這個結論已在另一篇論文中進行了充分的驗證[23]。由此可見,速度相關型阻尼和摩擦阻尼并聯組合控制具有良好的控制效果,是加勁梁縱向運動綜合控制的有效方向。
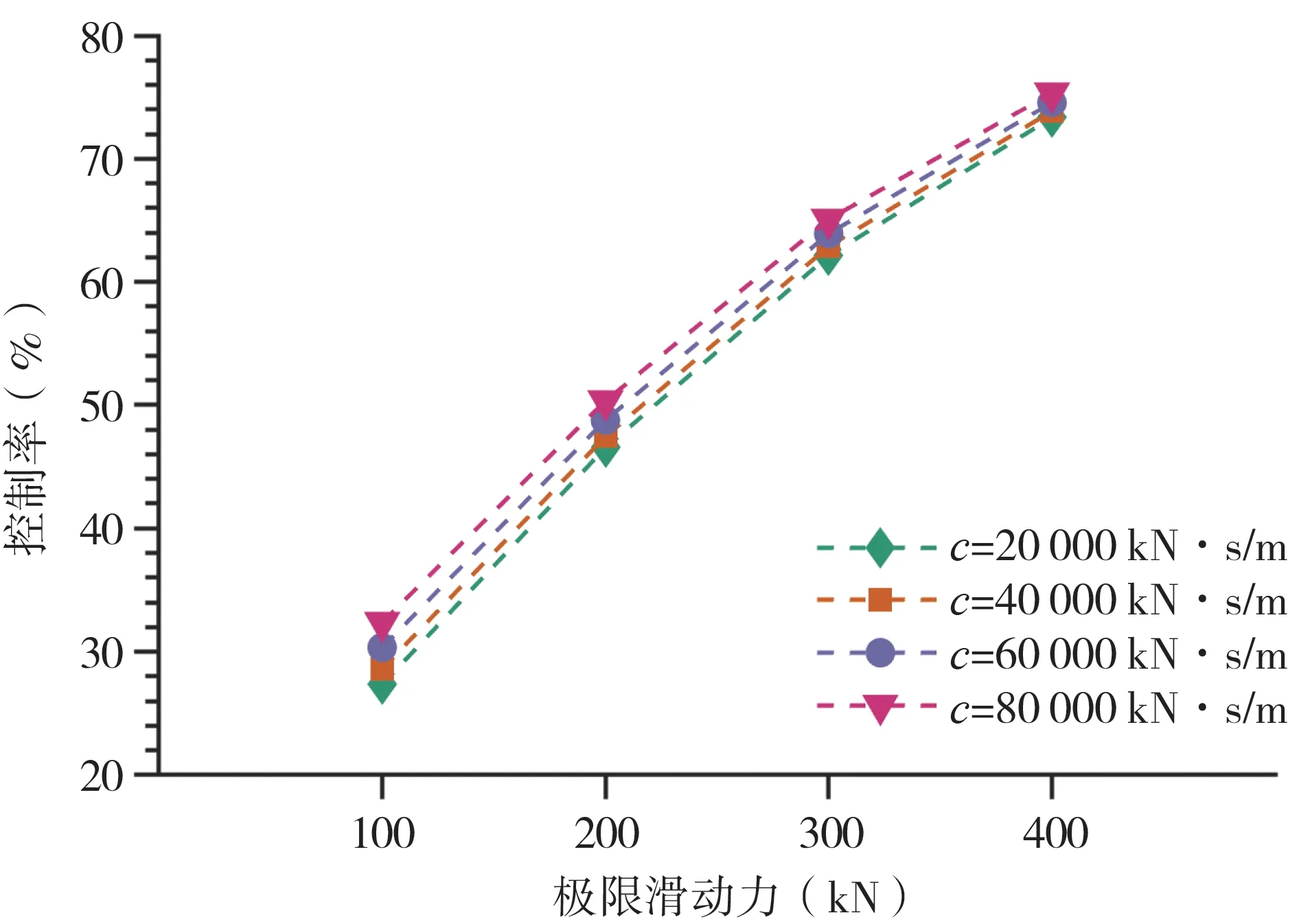
圖15 組合控制對擬靜態縱向運動累積行程的影響Fig.15 Influence of combinational control method on cumulative stroke of quasi-static longitudinal motion
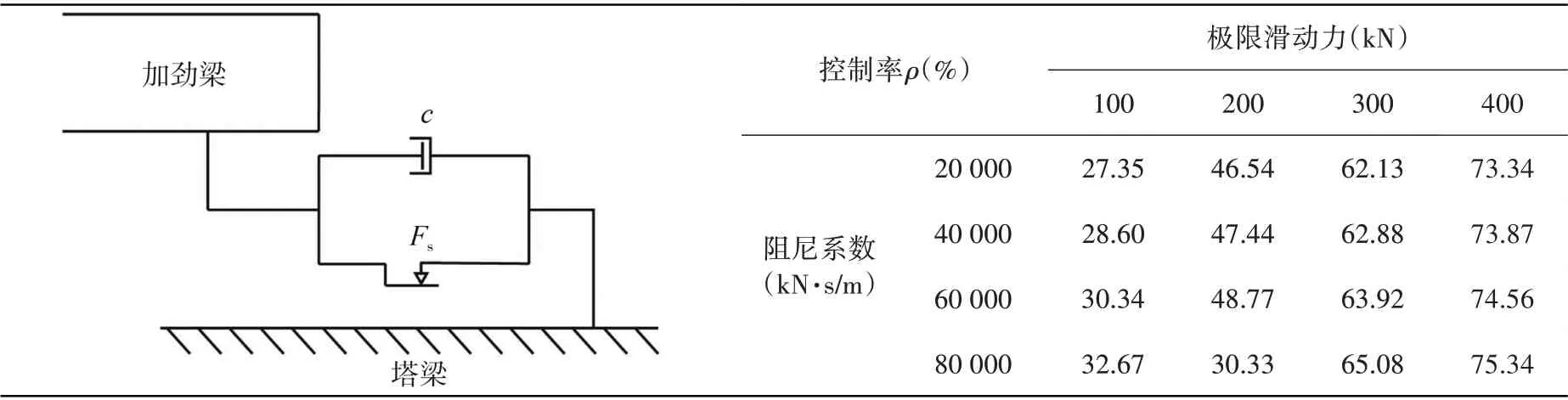
表4 組合控制工況表Table 4 Combination control method for different cases
對于采用剛度對擬靜態縱向運動進行控制的位移型阻尼器,如軟鋼阻尼器等,由于無法釋放因為溫度變化加勁梁變形產生的溫度內應力,所以采用該類型阻尼器進行縱向位移控制不是合理的選擇。
結合上述分析,速度阻尼能夠抑制高速度的振動,但是對低速的擬靜態縱向往復運動的抑制效果較差;而摩擦阻尼器在低速時能夠提供較大的阻尼力,從而非常適合用來抑制加勁梁擬靜態縱向運動;二者并聯組合方案是加勁梁縱向運動綜合控制的有效方向。
4 結論
(1)對加勁梁縱向位移時程曲線的分析和分解表明,縱向位移可以分為溫度變化引起縱向伸縮變形,擬靜態縱向運動和低頻振動共振3 個部分。擬靜態縱向運動在累積行程中占比超過70%,進行縱向運動控制時不能忽略其影響。
(2)加勁梁的擬靜態縱向運動是由于車輛荷載在懸索橋加勁梁上的不對稱分布造成的。為了簡便起見,按照加勁梁梁端位移相等原則,將車輛荷載簡化為一個加在懸索橋加勁梁1/4跨處的等效豎向集中力進行處理。
(3)基于擬靜態縱向運動的產生機理,反演得到等效豎向集中力,可以有效還原實測分解得到的擬靜態縱向運動,且該等效集中力能夠方便地評估各類控制裝置對擬靜態縱向運動的控制效果,并避免了采用隨機車流模型模擬過橋的難題,簡化了計算流程。
(4)采用速度型阻尼器與摩擦阻尼器組合的方式,可以有效的抑制加勁梁的擬靜態縱向運動。