改進鴿群優化算法在SVD-UKF參數整定中的應用*
2022-02-28 13:56:26周延鋒李寧洲衛曉娟王衛紅
傳感器與微系統 2022年2期
關鍵詞:優化
周延鋒, 李寧洲, 衛曉娟, 王衛紅
(1.蘭州交通大學 機電工程學院,甘肅 蘭州 730070; 2.上海應用技術大學 軌道交通學院,上海 201418;3.株洲九方裝備股份有限公司,湖南 株洲 412001)
0 引 言
近年來,鴿群優化(pigeon-inspired optimization,PIO)算法因其結構簡單、易于理解以及較強的全局搜索能力而受到諸多學者的廣泛關注[1,2]。但其易陷入局部最優,且收斂速度較慢。文獻[3]將鴿群優化思想引入粒子濾波算法,通過在鴿群優化過程中加入自適應交叉操作來增加粒子多樣性,提高了粒子濾波算法的求解精度。郭瑞[4]通過引入收斂因子、位置因子以及速度因子來增強鴿群活力、提高種群多樣性,擴大了潛在解的搜索空間。文獻[5]提出了一種基于A*和鴿群算法的航路規劃算法,實現了對航路進行平滑化和重規劃處理。文獻[6]將混沌優化與迭代步長動態調節策略相結合,對混沌變量和優化變量進行映射操作,提高了算法的收斂速度與局部搜索能力。文獻[7]通過引入自適應權重系數,對種群個體的速度和位置進行更新,提升了航路規劃質量和效率。
為進一步加快PIO算法的收斂速度,提升全局搜索能力及局部收斂精度,本文在指南針算子中融入天牛須搜索(beetle antennae search,BAS)算法來增大潛在解的搜索空間,在地標算子引入Kent混沌擾動策略來提高局部搜索能力及收斂精度,通過測試函數和奇異值分解—無跡卡爾曼濾波(SVD-UKF)參數整定的仿真實驗檢驗改進效果及可行性。
1 PIO算法
受鴿群飛行導航方式啟發,段海濱教授提出了PIO算法,其數學模型包括指南針算子和地標算子兩部分[7,8]。
首先引入指南針算子,對于D維目標搜索空間中的優化問題,每個鴿群個體i代表一個可行解,其位置和速度可分別表示為:Xi=(xi1,xi2,…,xiD),i=1,2,…,N,Vi=(vi1,vi2,…,viD),i=1,2,…,N,其中,N為鴿群規模,即所有可行解的個數。在第k次迭代中,鴿群個體的速度Vi及位置Xi根據下式進行更新
Vi(k)=Vi(k-1)*e-Rk+r1(Xg-Xi(k-1))
(1)
Xi(k)=Xi(k-1)+Vi(k)
(2)
式中R為指南針因子,r1為[0,1]上的隨機數,Xg全局最優解。
在地標算子中,每迭代一次,鴿群規模N減半,適應度較優的50%鴿群的中心位置Xc作為鴿群個體飛行的參考方向,鴿群個體的更新方式如下
N(k)=N(k-1)/2
(3)
(4)
Xi(k)=Xi(k-1)+r2(Xc(k)-Xi(k-1))
(5)
式中F(?)為鴿群個體重量,解決最小優化問題時F(?)=1/f(?)+ε,ε為一個很小的數,針對最大優化問題時F(?)=f(?),r2為[0,1]上的隨機數。
2 改進的PIO算法
2.1 指南針算子改進
BAS算法作為一種新型仿生算法,其數學原理表述如下:
1)假設天牛隨機向任何方向前進,即右觸須指向左觸須的矢量可使用隨機向量進行表示,對其進行歸一化處理可得
(6)
式中D為空間維度。
2)天牛質心為X,d0為兩觸須間距離,則左右觸須位置可表示為
(7)
3)確定左右觸須氣味強度f(Xl)和f(Xr),進而判別天牛前進方向。
4)結合天牛的搜索行為,天牛位置的迭代更新方式為

(8)
式中Xk為第k次迭代中的天牛質心,Xl(k-1),Xr(k-1),δk-1分別為第k-1次迭代中的左右觸須位置及步長。
5)更新步長公式如下
δk=δk-1η
(9)
式中η為步長衰減系數。
循環步驟(1)~步驟(5),即可獲得全局最優解。因此,在指南針算子中,基于BAS算法對PIO算法進行改進的基本思路是當鴿群個體位置與速度更新之后,將其視為天牛,計算其按照BAS算法移動之后的適應度值,并對移動前后的適應度值進行對比,如果移動后的適應度值更優,則移動,否則不進行移動。
2.2 地標算子改進
混沌作為一種非線性動力學現象,在搜索空間具有很強的遍歷性。為提高算法的局部搜索精度,在地標算子中引入混沌擾動策略,以獲得相對較優的鴿群個體。
本文采用遍歷性較好的Kent混沌映射,其數學模型為
(10)
式中Zn為混沌變量。
地標算子中,鴿群個體位置的更新方式由其適應度值決定,適應度值較優的前N/2個個體采用原方式更新,適應度值較差的后N/2個個體采用引入混沌擾動的方式更新,更新方式具體如下
(11)
式中β(k)為調節系數,Zi為第i個鴿群個體的混沌變量。
綜上所述,改進的PIO(IPIO)算法流程為:
Step1 初始化鴿群規模N、指南針算子迭代次數Nmap、地標算子迭代次數Nland、指南針因子R、鴿群個體的速度V和位置X;初始化兩觸須距離d0、步長δ、衰減系數η。
Step2 根據式(1)、式(2)更新鴿群個體速度Vi(k)及位置Xi(k),然后根據式(6)~式(8)更新天牛位置XiBAS(k),根據式(9)更新步長。
Step3 比較天牛移動前后的適應度值f(Xi(k))和f(XiBAS(k)),選擇適應度值較優個體作為更新后的鴿群個體,更新全局最優解Xg。
Step4 判斷是否k>Nmap,是則執行下一步,否則返回Step2。
Step5 根據式(3)、式(4)計算鴿群數目和鴿群位置中心,根據式(11)更新鴿群個體位置,進而更新全局最優解Xg。
Step6 判斷是否k>Nland,是則結束程序,輸出全局最優解Xg,否則返回Step5。
3 基于IPIO算法的SVD-UKF參數整定
無跡Kalman濾波(UKF)因其濾波求解精度較高等優點在諸多領域得到了廣泛地應用[9]。但其采用的Cholesky分解無法對非正定矩陣進行分解,易造成病態問題。為避免這一問題,增強協方差矩陣的數值穩定性,可利用求解性能較好的奇異值分解(SVD)對Cholesky分解進行替換。
SVD-UKF的參數主要有:過程噪聲協方差矩陣Q,觀測噪聲協方差矩陣R以及尺度系數ρ。以往參數的設定主要依賴主觀經驗,估計效果不佳。因此,本文將結合機車黏著控制工程背景,利用IPIO算法對SVD-UKF的參數進行整定。參照文獻[10],SVD-UKF觀測器的狀態方程及觀測方程分別如下
(12)
(13)
式中Tm為牽引電機轉矩,TL為牽引電機負載轉矩,Jequ為輪對側等效轉動慣量,Rg為齒輪箱傳動比,ωw為輪對角速度。
通過分析可知,Q為二維對角陣,而R和ρ均為常數,故IPIO算法的尋優個體可構造為Xi=(q1,q2,R,ρ),4個參數作為IPIO算法的適應度變量。尋優問題適應度函數的選擇常依據其性能進行選擇,本文選擇動態響應速度較快、超調量小的時間誤差積分準則ITAE,所構造IPIO算法適應度函數的數學表達式為
(14)

4 仿真實驗
4.1 算法性能測試
為驗證IPIO的正確性及有效性,將其與PIO及PSO算法進行對比分析。所選性能測試函數為Rosenbrock、Sphere、Griewangk以及Rastrigin,其均在(0,…,0)點處取得全局最小值0。為保證測試結果的公平性及科學性,對其均進行以下參數設置:種群/粒子群數量N=50,最大迭代次數k=1 000,個體/粒子維數D=20,將其各自獨立運行30次的最優值及最優值的平均值和方差作為測試結果。4種測試函數的表達式及變量取值范圍如下

xi∈[-30,30],

xi∈[-600,600]

xi∈[-5.12,5.12]
三種算法對4種性能測試函數的尋優結果見表1,適應度收斂曲線如圖1~圖4所示。
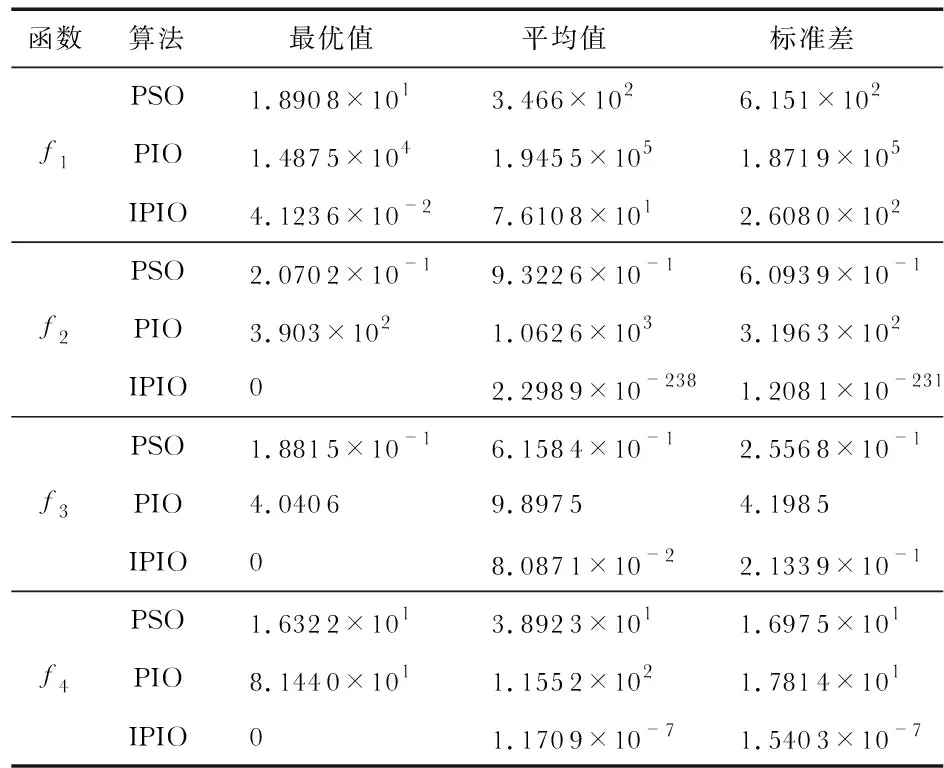
表1 測試函數尋優結果
由表1可知,針對單峰函數,對于函數f1,IPIO的最優值分別比PIO和PSO高6個和3個數量級,平均值分別高于4個和1個數量級;對函數f2,只有IPIO的最優值為0,其平均值和標準差也遠遠高于PIO和PSO。
針對多峰函數,對于函數f3,只有IPIO的尋優最優值為0,平均值和標準差也均優于PIO和PSO;而對函數f4,仍只有IPIO的最優值為0,且平均值和標準差也均高于其他兩種算法8~9個數量級。
由圖1~圖4可以看出,IPIO算法總能夠迅速地收斂,其收斂速度均遠高于PIO和PSO,證明對指南針算子的改進有效提升了其全局收斂速度。從表1的實驗結果也可以看出,由于Kent混沌擾動策略的融入,地標算子的局部搜索能力及搜索效果也得到了顯著的提升。通過以上分析,均證實了本文對PIO所提出改進策略的可行性及有效性,為后期的參數整定奠定了基礎。
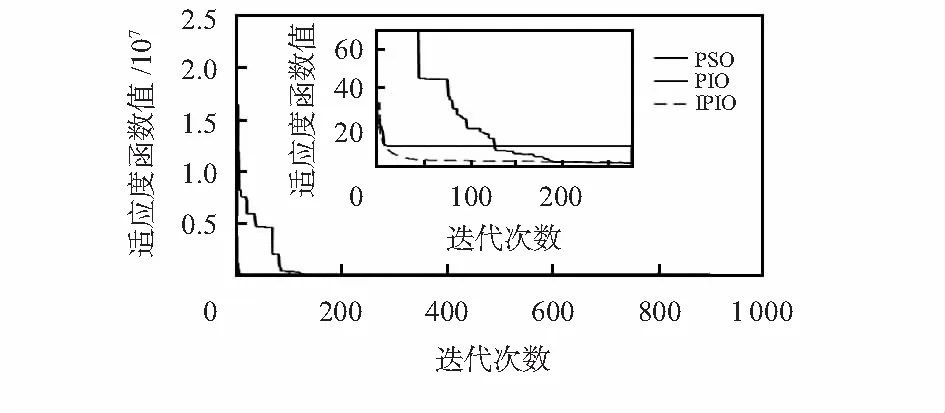
圖1 f1函數的適應度收斂曲線
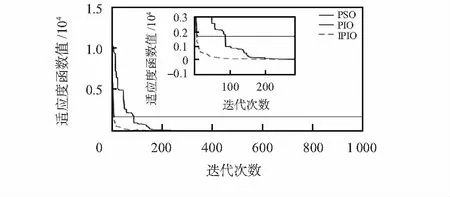
圖2 f2函數的適應度收斂曲線
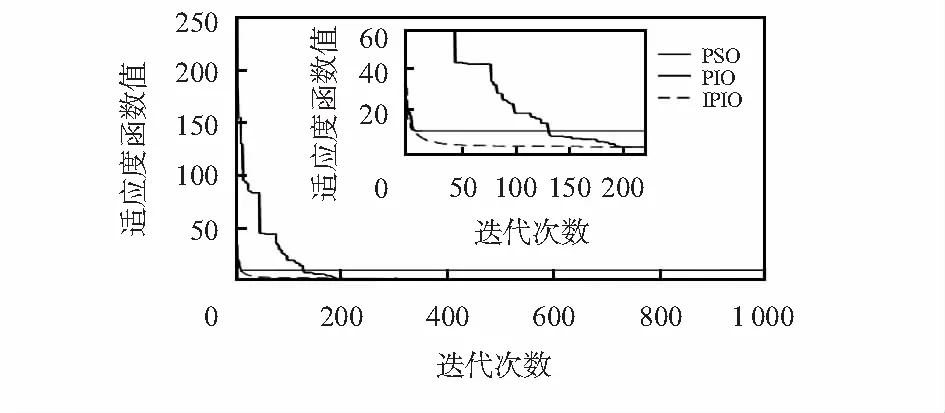
圖3 f3函數的適應度收斂曲線
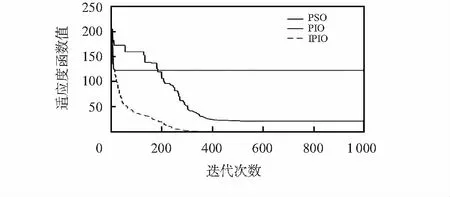
圖4 f4函數的適應度收斂曲線
4.2 SVD-UKF參數整定
采用IPIO算法腳本文件調用機車單輪對SIMULINK模型的方式,對SVD-UKF參數進行整定,機車動力學參數設置:車輪半徑R為0.625 m,軸重W為25 000 kg,齒輪箱傳動比Rg為5.64,齒輪箱傳遞效率ηgear為0.95,車輪側等效轉動慣量Jequ為184.9 kg/m3。
以式(14)作為適應度函數進行尋優,獲得一組最適合的參數(q1,q2,R,ρ)來滿足機車黏著控制過程中的觀測需求。算法參數設置為:N=30,Nmap=90,Nland=30,R=0.3,d0=2,δ=π,η=0.95。基于此,優化整定后的SVD-UKF參數為(8.420 1×10-6,9 189.474,0.01,1.001 5),SVD-UKF參數優化整定過程中的適應度函數收斂曲線如圖5所示。
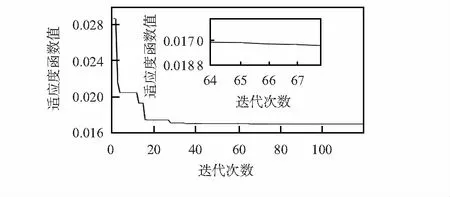
圖5 SVD-UKF參數整定適應度函數收斂曲線
從圖5可以看出,IPIO算法在SVD-UKF參數優化整定過程中,適應度函數收斂速度較快,在迭代次數30次左右時,已收斂至全局最小值附近,表明改進算法在SVD-UKF參數整定時亦具有較優的搜索性能。
黏著系數估計對比分析如圖6所示。機車運行過程中,軌面工況在5 s時進行切換,從圖6中可以看出,參數優化整定前的黏著系數估計效果并不理想,對軌面實時黏著系數的估計存在滯后現象。而參數優化整定后的SVD-UKF響應速度較快,在不同的軌面工況下,均能夠對軌面實時黏著系數進行有效估計,跟蹤效果較好,為機車黏著的有效控制及提高其黏著利用率提供了保障。

圖6 黏著系數估計對比分析
5 結 論
針對PIO算法易陷入局部最優、收斂速度較慢的缺點,提出了融合天牛須算法與混沌擾動策略的改進方式。通過性能測試函數驗證了IPIO算法的可行性及有效性。并將經IPIO優化整定后的SVD-UKF應用到機車黏著控制中,仿真結果表明:在不同工況下SVD-UKF均具有良好的估計效果,所提出的適應度函數也能夠有效地對觀測器的濾波估計效果進行定量評估。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45