基于信號指紋的無人機遙控端個體識別方法*
2022-02-28 13:52:12樊寬剛歐陽清華劉亞輝
傳感器與微系統 2022年2期
何 兵, 樊寬剛, 歐陽清華, 李 娜, 劉亞輝
(1.江西理工大學 機電工程學院,江西 贛州 341000; 2.江西理工大學 電氣工程與自動化學院,江西 贛州 341000)
0 引 言
近年來,民用無人機(drone)技術發展迅速,并廣泛應用于視頻拍攝、農業、電力、搜救等領域[1],然而其同時也帶來社會安全問題。如2018年8月7日委內瑞拉總統遭到三架改裝的民用無人機未遂暗殺,國內出現無人機干擾民航飛行,香港暴徒使用無人機投擲汽油彈。面對日益嚴峻的無人機威脅,國內外已積極開展無人機識別技術研究。
目前,對于無人機的探測識別主要采用三種方法,圖像識別、聲音識別和無線電信號識別。圖像識別采用圖像處理技術,識別目標區域內無人機,但存在識別率低和識別盲區的問題[2];聲音識別通過檢測無人機螺旋槳聲音,識別鄰近無人機,但存在抗噪性弱,識別距離短的問題[3,4];無線信號識別利用信號處理技術,提取無人機通信信號特征,探測識別無人機,與圖像和聲音識別相比,具備抗噪性好,探測識別距離遠的優點[5,6]。在文獻[7]中使用了軟件無線電YunSDR平臺,通過匹配跳頻圖案識別無人機遙控信號。在文獻[8]中通過提取無人機信號頻譜特征,然后使用人工神經網絡(artificial neural network,ANN)對無人機信號進行分類識別。
得益于信號指紋技術能夠提取信號源中細微特征,信號指紋技術被廣泛應用于無線信號的分析處理上[9,10]。在文獻[11]中采用了一種基于無人機無線信號指紋特征的檢測方法,利用頻譜累積(spectrum accumulation,SA)和統計指紋分析(SFA)作為無人機信號指紋特征,通過人工神經網絡(ANN)識別無人機。在文獻[12]中采用檢測無人機遙控信號能量突變位置,取能量突變位置鄰近信號的偏度、方差、能量譜熵和峰度作為信號指紋,并利用多種機器學習方法對無人機信號實現識別。
由于無人機遙控端信號發射裝置硬件上具有細微差異,致使遙控信號附加了獨特的信號指紋特征。本文采用信號指紋技術,提取無人機遙控端個體的信號指紋特征,利用多種機器學習方法識別無人機遙控端個體。
1 無人機信號指紋形成機理
無人機信號指紋是由信號發射器元器件存在非線性差異造成的,因為無人機信號發射器電子元器件存在制造容差和漂移容差。這使同一批次生產的無人機無線通信設備的硬件參數也會存在細微差異,包括振蕩器的頻偏、相位噪聲和功率放大電路的非線性失真。
無人機信號發射器典型結構如圖1所示,信息信號m(t)進入基帶信號處理電路,生成基帶信號i(t)和q(t),分別和載波v(t)通過乘法器相乘,其中,q(t)與-90°相移載波v(t)相乘,兩路信號再通過加法器得到s0(t),最后,通過功率放大電路得到發射信號sn(t)。
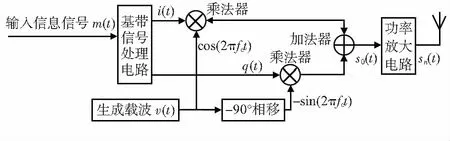
圖1 無人機信號發射器典型結構
當載波v(t)=cos(2πfct),fc為載波頻率,載波v(t)與基帶信號i(t)和q(t)得到調制信號s0(t)
s0(t)=cos(2πfct)i(t)-sin(2πfct)q(t)
(1)
當cos[φ(t)]=i(t),sin[φ(t)]=q(t),由式(1)得
s0(t)=cos[2πfct+φ(t)]
(2)
假設功率放大倍數為a0,則由s0(t)得sn(t)為
sn(t)=a0s0(t)=a0cos[2πfct+φ(t)]
(3)
1.1 相位噪聲
實際上無人機信號發射器中的載波信號,由于頻率合成器中壓控振蕩器電阻熱噪聲引起阻抗變化,或晶振中電感電容變化引起電抗變化,將產生寄生調幅和相位噪聲,使載波發生變化。載波v(t)帶有寄生調幅和相位噪聲后,實際載波v(t)為
v(t)=[1+a(t)]cos[2πfct+φn(t)]
(4)
式中a(t)為寄生調幅,φn(t)為相位噪聲,寄生調幅a(t)受自限幅抑制比較小,忽略后得
v(t)=cos[2πfct+φn(t)]
(5)
展開后得
v(t)=cos(2πfct)cos[φn(t)]-
sin(2πfct)sin[φn(t)]
(6)
當φn(t)≤1 rad時,得
v(t)=cos(2πfct)-φn(t)sin(2πfct)
(7)
由式(7)可知相位噪聲使載波v(t)帶有受相位噪聲φ(t)調制的雙邊帶信號。
1.2 載頻偏差
無人機信號發射器使用后受環境影響和設備老化,嚴重影響載頻穩定度,出現載頻偏差,實際載波v(t)為
v(t)=cos[2π(fc+Δf)t+φn(t)]
(8)
式中 Δf為無人機設備受影響后出現的載頻偏差。
1.3 功率放大電路的非線性失真
無人機信號發射器中的功率放大電路由于生產工藝和元器件差異,使無人機信號存在失真,帶有特有的雜散成分特征。Taylor級數模型將功放電路建模為一個非線性函數,并用Taylor級數描述
(9)
式中s0(t)為功放激勵信號,sn(t)為功放輸出信號,al為Taylor級數系數,L為Taylor級數階數。
2 無人機遙控信號指紋特征提取
2.1 無人機遙控信號
無人機通信信號包括圖傳信號和遙控信號,頻段為2.4 G或5.8 G,遙控信號采用跳頻通信提高抗干擾能力,調制方式采用高斯頻移鍵控(Gaussian frequency shift keying,GFSK)[13]。無人機圖傳信號定頻通信,但帶寬在10 MHz以上,對信號接收設備要求高。遙控信號雖然采用跳頻,但結構簡單易于處理,本文采用遙控信號進行無人機信號指紋的遙控端個體識別研究。
無人機遙控信號由暫態信號和穩態信號兩部分組成。暫態信號存在于信號的起始部分(圖2中1所示),源于無人機遙控信號發射器采用功率漸升模式,使暫態信號幅值逐漸增大到工作值。穩態信號開始是一段單一頻率的前導序列(圖2中2所示),隨后是調制的信息序列(圖2中3所示)。對于無人機信號指紋特征提取,分別提取暫態和穩態信號的特征,再將暫態和穩態信號特征融合作為無人機遙控信號指紋完整特征。
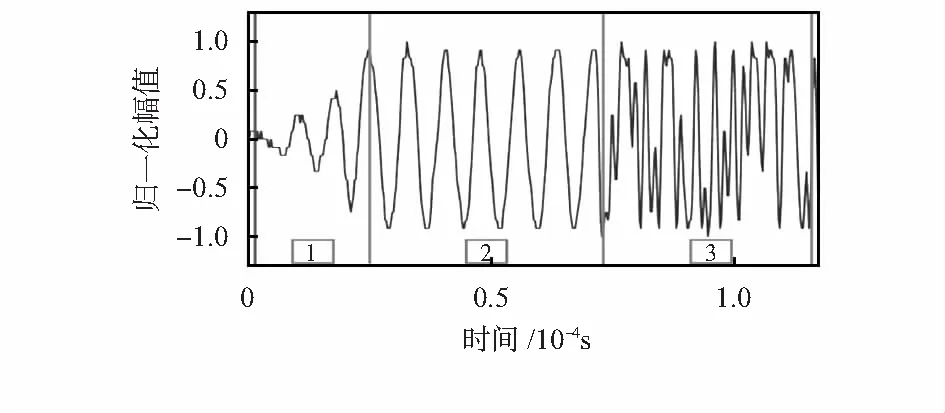
圖2 無人機遙控信號部分時域
2.2 暫態信號特征提取
暫態信號具有持續時間短,但包含無人機信號發射器豐富非線性特征的特點。本文采用基于希爾伯特變換和多項式擬合的特征提取方法,首先提取暫態信號包絡曲線,利用多項式擬合包絡曲線,提取包絡曲線中蘊含的暫態特征。
對采集的無人機遙控原始信號x(t)的希爾伯特變換定義為
(10)
其中,x(t)的解析信號g(t)可表示為

(11)
信號x(t)與解析信號g(t)的幅值相等,因此可得原始實信號x(t)的包絡曲線,表示為
(12)
A(t)即為經過希爾伯特變換得到的暫態信號包絡曲線,接著使用多項式擬合包絡曲線。
擬合函數p(t)可表示為
p(t)=a0+a1t+a2t2+…+antn
(13)
式中n為擬合階次,an為擬合函數系數。取a1,…,an作為暫態信號特征向量。
2.3 穩態信號特征提取
穩態信號中的前導序列為一段頻率穩定的信號,由于不同無人機信號發射器的硬件差異,使前導序列頻率不同。利用無人機遙控信號的瞬時頻率估計前導序列頻率,進而提取穩態信號特征。

(14)
進一步得瞬時角頻率ω(t)
(15)
定義fs為采樣頻率,得瞬時頻率f(t)
(16)
由前導序列得到瞬時頻率后,再取前導序列瞬時頻率的均值、方差、偏度、峰度作為穩態信號特征向量。
3 實驗結果與分析
3.1 實驗環境
本實驗采用1個HackRF作為無線信號接收器,HackRF主要參數工作頻率10 MHz~6 GHz,最大采樣頻率22 MHz,8位采樣寬度。1架大疆精靈3型無人機,以及配套的2個遙控器。電腦配置為Intel?CoreTMi7—7700,Windows 10 64位。實驗軟件采用MATLAB R2016a。搭建的實驗平臺如圖3所示。
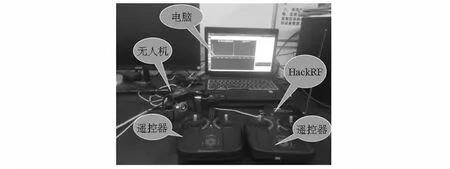
圖3 實驗平臺
3.2 實驗設計
無人機分別與2個遙控器連接工作后,設置HackRF中心頻率為5 743 MHz,采樣頻率為4 MHz,分別采集兩個遙控器120 s的原始數據。數據預處理,每10個遙控信號脈沖為一個樣本,每個遙控器個體采集100個樣本。分別對每一個樣本內信號按2.2節和2.3節方法提取暫態和穩態特征。為了降低噪聲干擾,將一個樣本內10個遙控信號脈沖提取的暫態包絡曲線進行相加平均后,再使用4次多項式擬合提取特征。圖4表示兩個遙控器個體一個樣本內的暫態信號包絡曲線。穩態信號前導序列瞬時頻率同樣相加平均后,提取穩態特征。圖5表示兩個遙控器個體一個樣本內的穩態信號前導序列瞬時頻率。
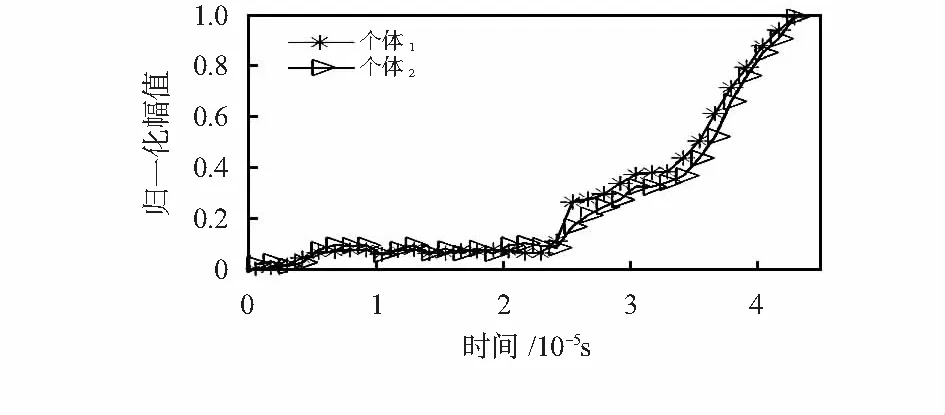
圖4 暫態信號包絡曲線
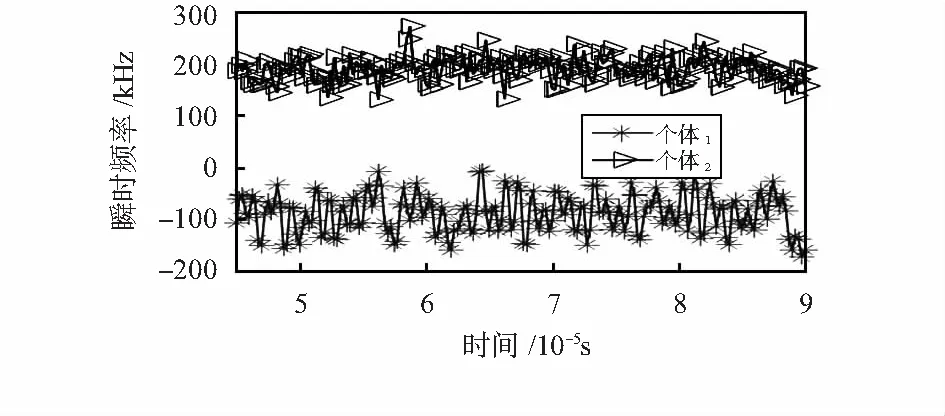
圖5 穩態信號前導序列瞬時頻率
3.3 對遙控端個體識別效果
將每個遙控器采樣的100個樣本作為數據集,其中,80個作為訓練集,20個作為測試集。同時在樣本中添加高斯白噪聲,得到信噪比(SNR)在-5~20 dB的不同數據。圖6所示為采用決策樹(Tree),樸素貝葉斯(NB),判別分析(Discr),K最近鄰(KNN)等四種機器學習方法對遙控端個體進行分類識別效果圖。圖6結果表明,本文提出的信號指紋特征方法在信噪比10 dB時對兩個遙控段個體有90 %識別正確率。
3.4 仿真實驗結果與分析
為了進一步驗證本文提出的無人機遙控端個體識別方法的適用性,仿真構造了5個遙控端個體信號數據。仿真中,所用的無人機遙控信號包含功率放大電路引起的非線性失真,信號發生器引起的載頻偏差,相位噪聲等特征。每個遙控端個體生成100個樣本數據,一共500個樣本,其中,400個樣本用于分類器的訓練,100個樣本用于分類器的測試。同時在樣本中添加高斯白噪聲,得到信噪比在-5~20 dB的不同數據,如圖6所示。
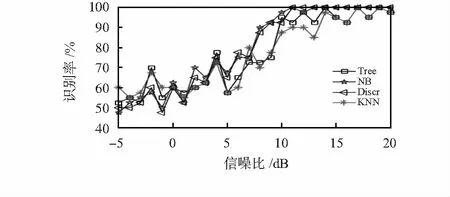
圖6 四種分類方法仿真識別效果
提取樣本中的暫態和穩態特征后,采用決策Tree,NB,Discr,KNN等四種機器學習方法對信號進行分類識別。圖7為利用Discr在不同信號指紋下識別效果,實驗表明,暫態加穩態特征更好體現了遙控端個體的信號指紋特征,顯著提高了識別率。圖8實驗結果表明在信噪比為5 dB時有90 %以上識別正確率。因此,采用本文方法提取的信號指紋特征能夠反映無人機遙控端個體的細微差異,具有良好的識別效果。
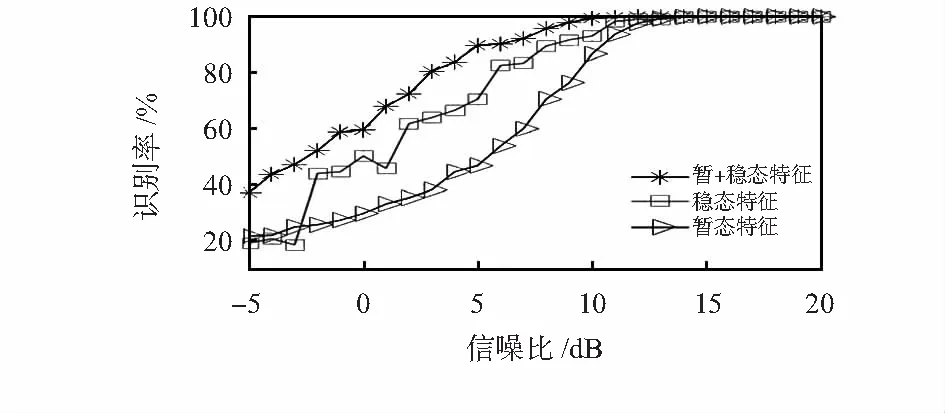
圖7 不同指紋特征識別效果
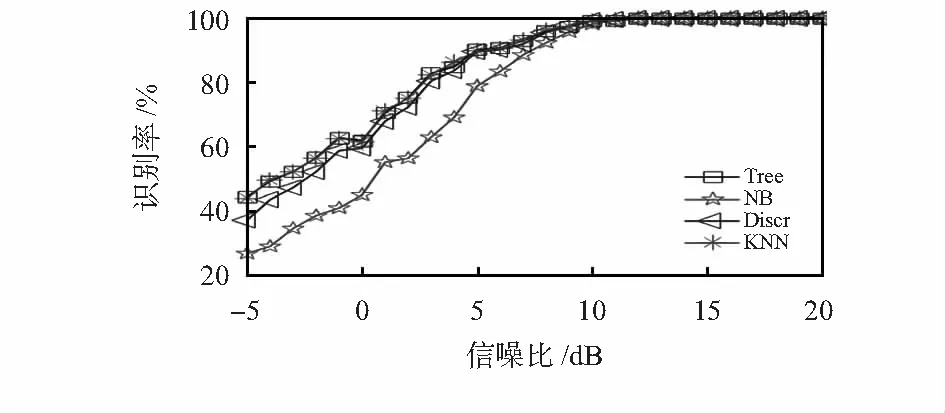
圖8 四種分類方法實驗識別效果
4 結 論
針對無人機遙控端個體間信號相似,難以識別的問題,提出一種基于信號指紋的無人機遙控端個體識別方法,采用希爾伯特變換得到無人機遙控信號暫態和穩態的瞬時特征,利用無人機遙控信號指紋特征完成對無人機遙控端的個體識別。實驗結果表明:本文方法通過提取無人機遙控信號的指紋特征,反映無人機遙控端個體間的細微差異,從而實現對無人機遙控端個體的有效識別,為后續定位無人機遙控端位置提供支持。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00