基于改進(jìn)矩陣束的動態(tài)同步相量測量算法
2022-02-27 11:24:10黃瑞宋健肖宇劉謀海溫和
湖南大學(xué)學(xué)報(自然科學(xué)版) 2022年2期
黃瑞,宋健,肖宇,劉謀海,溫和
(1.湖南大學(xué)電氣與信息工程學(xué)院,湖南長沙 410082;2.國網(wǎng)湖南省電力有限公司,湖南長沙 410004;3.智能電氣量測與應(yīng)用技術(shù)湖南省重點實驗室,湖南長沙 410004)
同步相量測量單元(phasor measurement unit,PMU)作為現(xiàn)代電網(wǎng)智能感知層的重要數(shù)據(jù)入口,在電網(wǎng)故障診斷、電壓穩(wěn)定性監(jiān)視、低頻振蕩分析、暫態(tài)穩(wěn)定性分析和控制等方面發(fā)揮著重要作用,高精確度和實時性的同步相量測量算法是保證PMU 穩(wěn)定高效工作的先決條件[1,2].隨著現(xiàn)代電網(wǎng)規(guī)模的不斷增大,配電網(wǎng)將面臨如下變化,(1)以光伏發(fā)電為代表的分布式電源大規(guī)模接入,可能導(dǎo)致配電網(wǎng)電壓和功率的振蕩;(2)電動汽車的大規(guī)模無序充電,可能致使配電網(wǎng)電壓跌落;(3)電動汽車和分布式電源大規(guī)模應(yīng)用,可能造成配電網(wǎng)諧波含量上升.這些改變使配電網(wǎng)中的PMU 面臨著強諧波、強噪聲和測量信號動態(tài)多變等環(huán)境,使得同步相量測量算法的設(shè)計面臨巨大挑戰(zhàn)[3-5].
為了應(yīng)對配電網(wǎng)全新測量環(huán)境的挑戰(zhàn),國內(nèi)外學(xué)者提出了很多改進(jìn)型或者全新的PMU 測量算法.根據(jù)基本原理,主要分為兩類:1)基于離散傅立葉變換(Discrete Fourier Transform,DFT)的算法,如文獻(xiàn)[6-8]等針對同步相量和頻率測量誤差與濾波器頻響特性的關(guān)系,根據(jù)最優(yōu)設(shè)計準(zhǔn)則,構(gòu)建DFT 類算法的等效數(shù)字濾波器組,提高了DFT 類動態(tài)同步相量測量算法的抗諧波能力.文獻(xiàn)[9]將泰勒相量模型分解為基本分量和若干子分量,然后用DFT 分別求出各分量,最后進(jìn)行合成與修正,減輕了功率振蕩對測量精度的影響.文獻(xiàn)[10]研究了DFT 在非同步采樣條件下的相角誤差分布規(guī)律后,用相角差對被測頻率跟蹤測量,得到精度較高的頻率值.文獻(xiàn)[11]提出了一種基于頻率偏移的DFT 修正方法,能實現(xiàn)動態(tài)變化過程的相量測量.盡管基于DFT 的算法具有很強的抗諧波能力和較高的計算效率,但由于頻譜泄漏的影響,此類算法在間諧波或帶外干擾存在時性能較差.2)基于泰勒動態(tài)相量模型和最小二乘法的算法,文獻(xiàn)[12]引入強跟蹤卡爾曼濾波器,由理論殘差與實際殘差的失配情況來調(diào)整測量過程,增強對動態(tài)信號的跟蹤能力.文獻(xiàn)[13]提出了泰勒加權(quán)最小二乘算法(Taylor Weighted Least squares,TWLS),其實質(zhì)是采用窗函數(shù)抑制旁瓣干擾和帶外噪聲.文獻(xiàn)[14]將加權(quán)最小二乘算法中的泰勒多項式替換為通帶波紋更低且阻帶衰減更高的Sinc 插值多項式,提高了此類算法在頻偏、諧波振蕩和線性調(diào)頻條件下的測量精度,但是間諧波干擾對算法精確度的影響很大.
綜合上述背景,為提高泰勒動態(tài)相量模型類算法的抗諧波與頻偏干擾性能,本文提出一種結(jié)合改進(jìn)矩陣束和二階泰勒動態(tài)相量模型的同步相量測量方法.先用改進(jìn)矩陣束估計電網(wǎng)基波頻率,然后結(jié)合泰勒二階多項式與最小二乘法修正頻率估計值,同時求出同步相量的幅值與相角參數(shù),最后使用我國同步相量檢測規(guī)范中的測試案例對所提算法進(jìn)行仿真測試,驗證本文算法的準(zhǔn)確度和實用性.
1 泰勒動態(tài)相量模型
根據(jù)電力系統(tǒng)同步相量標(biāo)準(zhǔn)可知,在不含噪聲等干擾的理想環(huán)境下,配電網(wǎng)電壓波形可用如下模型表示:
式中:A,φ1和f1分別為電壓波形的幅值、初相位和基波頻率,在理想的電網(wǎng)中,它們均為常數(shù).由于負(fù)荷動態(tài)變化和噪聲干擾等因素存在,實際電力系統(tǒng)中電壓波形的幅值和頻率會動態(tài)變化,考慮時變幅值和頻率的電壓波形動態(tài)模型可表示為:
式中:令P(t)=A(t)ejφ(t),易知P(t)能夠表征電壓幅值和頻率隨時間變化的特征,被稱為動態(tài)相量.
基于動態(tài)相量的時變特性,將P(t)用二階泰勒多項式表示為

式中:系數(shù)p0、p1和p2分別為動態(tài)相量P(t)的零階導(dǎo)數(shù)、一階導(dǎo)數(shù)和二階導(dǎo)數(shù).此處也可以使用高階泰勒多項式,但是二階多項式已經(jīng)能夠提供符合標(biāo)準(zhǔn)要求的測量精度.將式(3)代入式(2)中整理可得:
式中:“*”代表共軛運算符.
在實際電網(wǎng)中,電壓/電流信號中還有基波成份以外諧波與間諧波成份.信號模型(4)只考慮電網(wǎng)中的基波成份,無法精確表征含有諧波和間諧波分量的電網(wǎng)信號.因此將(4)擴展為多頻動態(tài)相量模型為
式中:M代表電網(wǎng)信號中的頻率成份數(shù),Ph(t)是第h個頻率分量對應(yīng)的動態(tài)相量,亦稱動態(tài)諧波(或間諧波)相量.
假設(shè)以采樣頻率fs對電網(wǎng)電壓x(t)進(jìn)行離散采樣,則離散化后得到的N點采樣序列為:
式中:T=1/fs且Zh=,對于采樣序列中的N個采樣點(為了保證t=0 為中心點,N取奇數(shù)),由式(6)可以得到N個線性方程:

式中:X為采樣序列,pall=[p1,…,ph,…,pM]T由所有頻率成份fh對應(yīng)動態(tài)相量的二階泰勒多項式系數(shù)組成,且ph=1/2[ph(0),ph(1),ph(2),ph*(0),ph*(1),ph*(2)];系統(tǒng)矩陣GM=[B1,…,Bh,…,BM],且Bh=[EhΠ2,;其中Eh是N×N對角矩陣,元素為;Π2是N×3 矩陣,下標(biāo)2 代表二階泰勒動態(tài)相量,其表達(dá)式為
因為求解動態(tài)相量就是求解系數(shù)向量pall.因為X已知,若是已知GM,系數(shù)向量pall可用最小二乘法求出:

式中:“H”是埃爾米特復(fù)共軛轉(zhuǎn)置運算符,若已知Z,則能求出系數(shù)向量.由Zh=可知,頻率fh的精確度會直接影響到最后動態(tài)相量系數(shù)矩陣的準(zhǔn)確度,本文選擇改進(jìn)矩陣束算法計算頻率fh,實現(xiàn)過程如第2節(jié)所述.
2 改進(jìn)矩陣束算法計算同步相量
2.1 矩陣束算法
在數(shù)值計算理論[15]中,矩陣束定義為:

式中:f(t,λ)是函數(shù)g(t)和h(t)的束函數(shù),包含了輸入信號的極點特征(在本文中,信號極點就是Z=ej2πfT);λ是約束參數(shù),為了保證約束生效,g(t)與h(t)不能是正比例關(guān)系.對于實際電網(wǎng)信號,本文提出的改進(jìn)矩陣束算法將噪聲、諧波和間諧波等看作無效干擾信息,只關(guān)注基波頻率成份,所以建立如下信號模型:

式中:k代表序列索引,y(kT),x(kT)和n(kT)分別代表采樣序列、理想信號序列和干擾序列.
第一步,使用采樣序列中的連續(xù)N點構(gòu)造(NL)×(L+1)型Hankel矩陣如下所示:
式中:L為矩陣束參數(shù),其取值會影響改進(jìn)矩陣束算法的抗干擾性能,一般選取N/3≤L≤N/2比較合適[16].
第二步,對Hankel矩陣Y進(jìn)行奇異值分解.為了區(qū)分輸入信號的基波成份與干擾成份,改進(jìn)矩陣束算法的核心思想是找出代表基波頻率成份的奇異值,因此需要對采樣信號構(gòu)成的Hankel 矩陣Y進(jìn)行奇異值分解:

式中:U為(N-L)×(N-L)型酉矩陣,V為(L+1)×(L+1)型酉矩陣,S為包含Hankel 矩陣Y所有奇異值的(NL)×(L+1)型對角矩陣.
第三步,利用奇異值分布規(guī)律濾除噪聲等干擾成份.對于無噪聲或者其他干擾的理想信號,矩陣S的對角元素會以一對降序排列的非零奇異值σ1和σ2開始,其余元素均為0.但是當(dāng)噪聲等干擾存在時,矩陣S的其余對角元素便不再為零.為了將噪聲干擾成份造成的奇異值與電網(wǎng)信號頻率造成的奇異值區(qū)分開,本文使用自適應(yīng)定階方法(見2.2節(jié))計算出頻率成份個數(shù)M.然后將噪聲等干擾成份對應(yīng)的σi(i=2M+1,2M+2,…)設(shè)置為零,于是得到新的奇異值對角矩陣S′.
第四步,構(gòu)造矩陣束.在上一步使用奇異值分布規(guī)律濾除干擾后,可以使用U、V和S′構(gòu)造矩陣束,取V的右奇異向量:

將V′去除最后一行得到V1,去除第一行得到V2,然后重構(gòu)兩個矩陣:

經(jīng)過干擾濾除和重構(gòu)之后,Y1和Y2被認(rèn)為由理想信號構(gòu)成,如下所示:
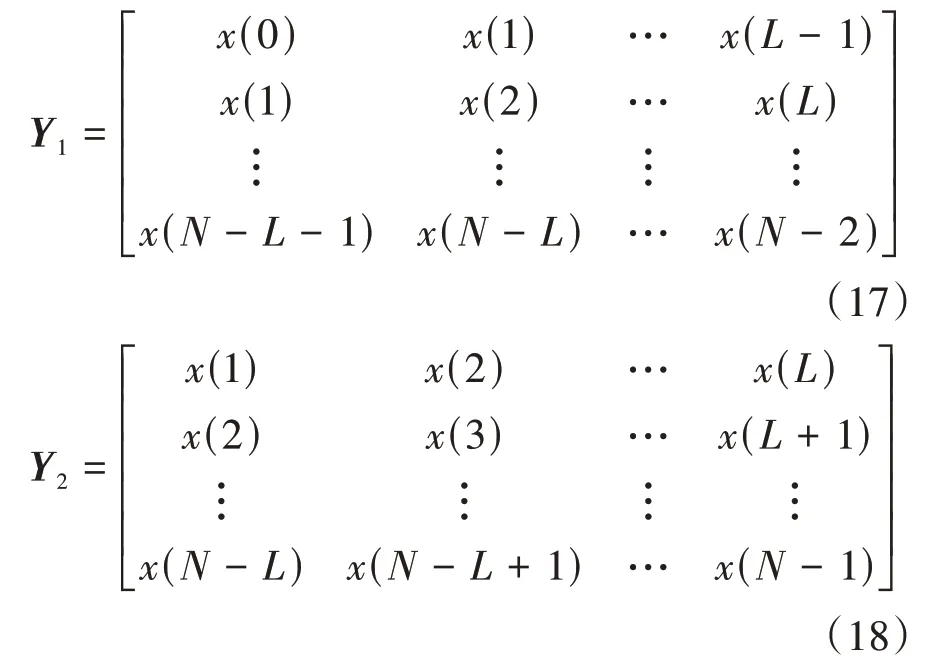
經(jīng)過上述步驟處理后得到的Y1和Y2不會滿足正比例關(guān)系,故可以使用Y1和Y2構(gòu)造矩陣束F(λ)=Y2-λY1.
第五步,提取矩陣束極點信息,求出基波頻率.由文獻(xiàn)[15]可知,極點Z可以通過求解矩陣束F(λ)的廣義特征值求出.因此可以將對Z的求解轉(zhuǎn)化為對Y1+Y2特征值的求解,此處Y1+為矩陣Y1的廣義偽逆矩陣:

求出Y1+Y2的特征值Z后,結(jié)合Z=可以得到電網(wǎng)信號的基波頻率為:

2.2 自適應(yīng)定階方法
對于如式(5)所示的信號模型,每個頻率fh成份會使奇異譜中出現(xiàn)一對連續(xù)的奇異值,分別處于奇異譜序列的奇數(shù)與偶數(shù)位置.一般來說,由電網(wǎng)信號頻率成份產(chǎn)生的奇異值遠(yuǎn)遠(yuǎn)大于因噪聲而產(chǎn)生的奇異值.定階算法需要將有效信號成份盡可能從背景噪聲中區(qū)別出來,才能保證矩陣束算法準(zhǔn)確計算信號各成份的頻率值.基于此,本文提出一種基于奇異值均值的自適應(yīng)定階方法,其步驟如下.
第一步,將奇異值分奇偶位置進(jìn)行重新排序

其中σi為奇異值矩陣S的對角線元素;
第二步,計算每個頻率fh對應(yīng)奇異值的均值,即奇異值均值序列

第三步,對奇異值均值序列進(jìn)行歸一化,求出奇異值均值歸一化序列Snor,各元素為

其中ρi為Smean的第i個元素,ρmax為Smean的第一個元素(也是值最大的元素).
第四步,定義噪聲奇異值的均值閾值η為

第五步,令M為序列Snor中所有大于η的個數(shù),即為電網(wǎng)信號頻率成份個數(shù).
2.3 同步相量參數(shù)計算
求出電網(wǎng)信號各頻率fh之后,結(jié)合公式(9)就能求出多頻動態(tài)相量系數(shù)向量pall=[p1,…,ph,…,pM]T,其中的基波動態(tài)相量系數(shù)為

故同步相量的相位角參數(shù)為

同步相量的幅值參數(shù)為

修正后的基波頻率參數(shù)為

2.4 算法流程圖
基于改進(jìn)矩陣束的動態(tài)同步相量測量方法流程如圖1 所示.首先將采樣信號序列構(gòu)造成Hankel 矩陣;接著對Hankel矩陣進(jìn)行奇異值分解處理,利用奇異值序列進(jìn)行自適應(yīng)定階得到電網(wǎng)信號中的有效頻率成份數(shù)M;然后根據(jù)奇異值分解結(jié)果和頻率成份數(shù)M構(gòu)建矩陣束,求解矩陣束的特征值后求出各信號成份的粗估計頻率值;最后利用求出的粗頻率值構(gòu)建基于二階泰勒動態(tài)相量模型的多頻系統(tǒng)矩陣,并用最小二乘法估計出二階動態(tài)相量系數(shù),進(jìn)而計算電網(wǎng)信號基波分量幅值、相位和頻率參數(shù),即為同步相量.
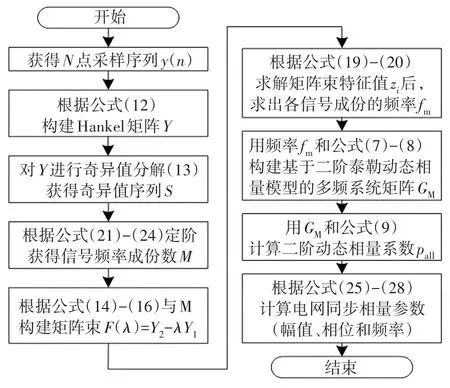
圖1 基于改進(jìn)矩陣束的動態(tài)同步相量測量方法流程圖Fig.1 Flow chart of the improved matrix pencil method for dynamic phasor estimation
3 算法測量精度分析
為了測試提出算法的精確度和魯棒性,本文根據(jù)我國檢測規(guī)范——《GB/T 26862-2011 電力系統(tǒng)同步相量測量裝置檢測規(guī)范》對算法的關(guān)鍵指標(biāo)進(jìn)行測試.根據(jù)重要性與實用性原則,主要從檢測規(guī)范中規(guī)定的頻率誤差、幅值誤差、相角誤差、幅值調(diào)試和頻率偏移影響等方面進(jìn)行測試.在所有實驗中,采樣頻率fs設(shè)置為2 400 Hz,觀測窗口長度分別為1、2 和3 周期.對采樣序列進(jìn)行逐點滑窗計算,并取1 周波(80 次計算)中的最大絕對誤差作為測試結(jié)果報告.另外,為直觀展示本文算法改進(jìn)效果,選取了TWLS算法作為對比算法進(jìn)行性能分析.
3.1 頻率測量誤差測試
我國同步相量測量裝置檢測規(guī)范規(guī)定,同步相量測量裝置在45~55 Hz 范圍內(nèi),頻率測量誤差不能超過0.002 Hz.測試信號如式(29)所示.Un為電力系統(tǒng)額定電壓.

表1 中記錄了改進(jìn)矩陣束算法在不同頻率下的頻率測量最大絕對誤差,可以看出,算法測量精度均在10-15數(shù)量級,完全符合標(biāo)準(zhǔn)要求,同時觀測窗長對算法精度無影響.
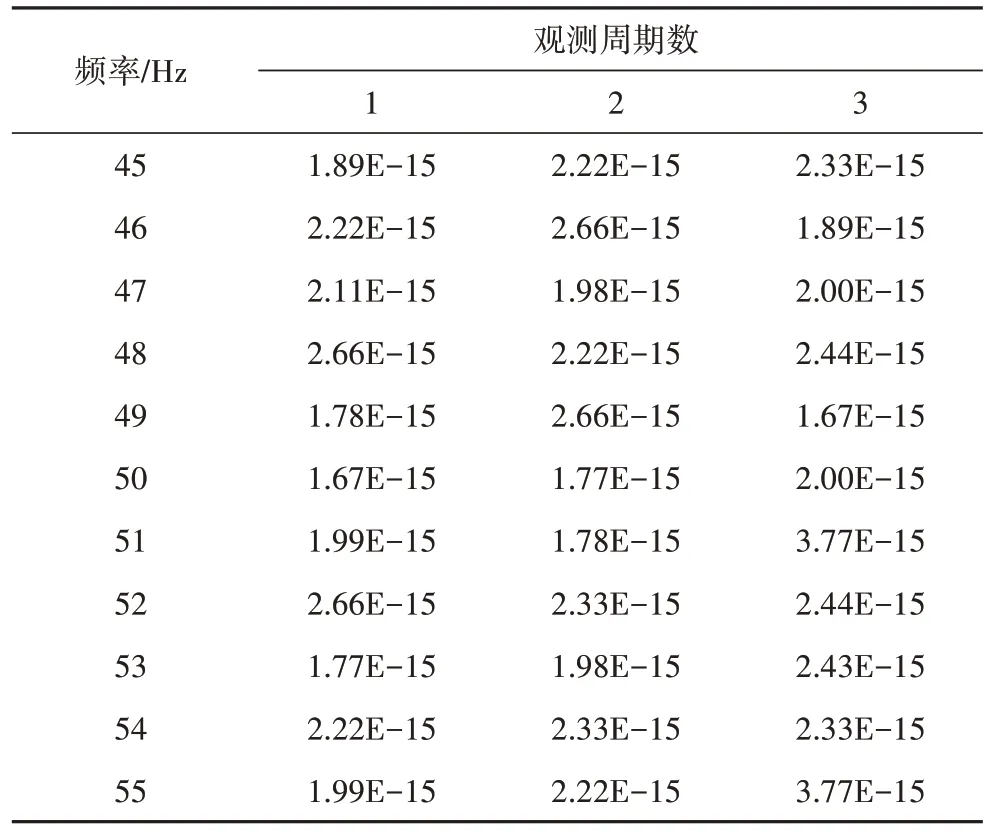
表1 頻偏下頻率測量最大絕對誤差Tab.1 Maximum absolute error of frequency estimation under frequency deviation conditions
3.2 相量測量誤差測試
由同步相量的定義知,相量包含幅值與相角兩個基本參數(shù).本小節(jié)根據(jù)同步相量測量標(biāo)準(zhǔn)規(guī)定分別對改進(jìn)矩陣束算法的幅值和相角測量精度進(jìn)行分析和評估,測試信號如式(30)所示.

3.2.1 幅值誤差測試
幅值測量誤差計算公式如式(31)所示,其中額定電壓Un為,電壓基準(zhǔn)值取Un的1.2 倍,此處為70 V.測試電壓幅值選取范圍為0.1Un~2.0Un,變化步長為0.1Un,標(biāo)準(zhǔn)要求在所有測量條件下的幅值測量誤差不能超過0.2%.
圖2 中的測試結(jié)果顯示,雖然改進(jìn)矩陣束算法的測量精度隨著電壓值變大而稍微降低,其理論精度為10-13數(shù)量級,遠(yuǎn)遠(yuǎn)優(yōu)于TWLS 算法的10-6數(shù)量級,且觀測窗長的變化對靜態(tài)信號測量精度無影響.
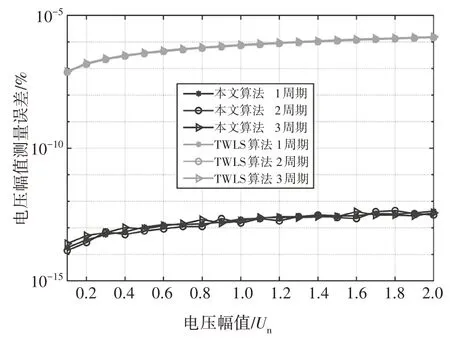
圖2 電壓幅值測量最大絕對誤差Fig.2 Maximum absolute error of voltage amplitude measurement
3.2.2 相角誤差測試
圖3 展示了改進(jìn)矩陣束算法在不同幅值情況下的相角測量精度.在所有測試條件下,算法的相角測量精度均能達(dá)到10-13數(shù)量級,不但滿足低于0.2°的要求,而且遠(yuǎn)遠(yuǎn)優(yōu)于TWLS 算法的10-3數(shù)量級.與幅值測量結(jié)果不同的是,相角測量精度隨著觀測窗長變小而提高.
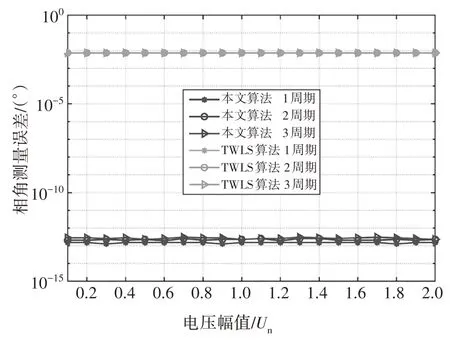
圖3 相角測量最大絕對誤差Fig.3 Maximum absolute error of phase angle measurement
3.3 幅度調(diào)制影響測試
在實際電網(wǎng)中,同步相量恒定不變的理想情況并不存在,相量的幅值和相角參數(shù)一定處于不同程度的動態(tài)變化中.為了保證同步相量裝置對動態(tài)信號具有良好的測量性能,檢測規(guī)范規(guī)定:在調(diào)制頻率范圍0.1~4.5 Hz 和幅度調(diào)制量為0.1Un測試條件下,基波電壓幅值測量誤差值應(yīng)小于等于0.2%,相角測量誤差應(yīng)小于等于0.5°.在幅度調(diào)制影響測試實驗中,調(diào)制頻率依次增加0.1 Hz,生成41組不同測試信號如式(32)所示.
改進(jìn)矩陣束算法對每組測試信號的幅值、相角和頻率測量精度結(jié)果分別如圖4-圖6 所示.從圖4可以看出,在調(diào)制頻率0.1~4.5 Hz 范圍中,電壓幅值測量誤差均小于0.1%,完全滿足檢測規(guī)范的精度要求.另外幅值測量精度與調(diào)制頻率大小和觀測窗長有關(guān),表現(xiàn)在:第一,幅值測量精度隨著調(diào)制頻率增大而降低;第二,幅值測量精度隨著觀測窗口長度增大而降低.從圖5 可以看出,改進(jìn)矩陣束算法相角測量精度均小于0.1°,完全滿足檢測規(guī)范要求,同時相角測量精度隨著調(diào)制頻率增大而降低.與幅值測量精度結(jié)果不同,觀測窗長度雖然影響相角測量精度,但是并未呈現(xiàn)比例關(guān)系.三種不同觀測窗情況下,2周期觀測窗測量結(jié)果表現(xiàn)較差;而在調(diào)制頻率4~4.5 Hz 范圍內(nèi),三種不同長度觀測窗提供的相角測量精度一樣.從圖6 可以看出,改進(jìn)矩陣束算法的頻率測量精度雖然隨著調(diào)制頻率增大而減小,但在各測試條件下均能優(yōu)于TWLS算法.
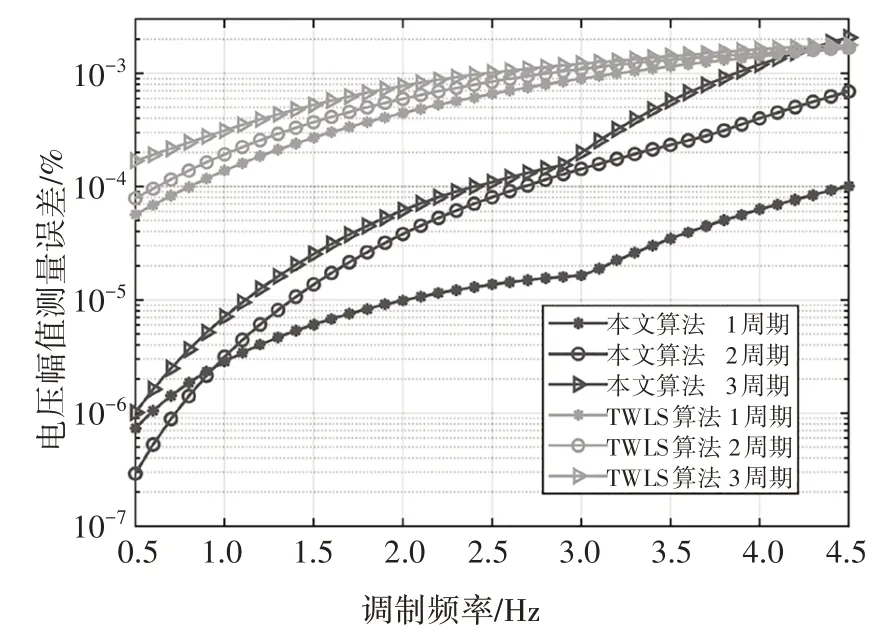
圖4 幅度調(diào)制下電壓幅值測量最大絕對誤差Fig.4 Maximum absolute error of voltage amplitude measurement under amplitude modulation
3.4 頻率偏移影響測試
在實際電網(wǎng)中,由于用電負(fù)荷與發(fā)電功率的不平衡,會導(dǎo)致實際電網(wǎng)頻率偏離標(biāo)稱頻率,因此需要測試改進(jìn)矩陣束算法在頻率偏差條件下的同步相量測量性能.實驗中,采用綜合矢量誤差指標(biāo)表示測量精度,其定義如下:

式中:TVE 是綜合矢量誤差,Pr和Pi分別為理想信號相量的實部與虛部,Pr(t0)和Pi(t0)分別為實測相量的實部與虛部.
檢測規(guī)范要求規(guī)定:在基波頻率45~55 Hz 范圍內(nèi),1 級同步相量測量裝置的綜合矢量誤差應(yīng)小于1%.基波頻率在45~55 Hz 之間以0.5 Hz 為步長進(jìn)行變化,測試信號如式(29)所示,測得改進(jìn)矩陣束算法的綜合矢量誤差如圖7所示.因為TWLS算法總是以電力系統(tǒng)標(biāo)稱頻率為參考值,所以測量精度受到頻率偏差影響極大;而改進(jìn)矩陣束算法在所有頻率偏差情況下,均有很高測量精度,誤差數(shù)量級小于10-12%,同時實驗結(jié)果表明增大觀測窗長度會導(dǎo)致算法的綜合矢量誤差變大.
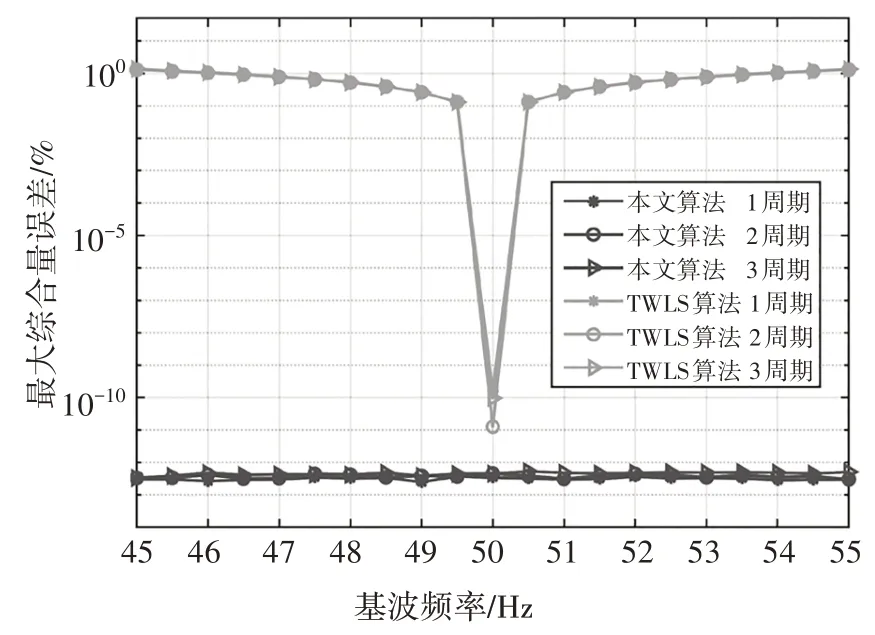
圖7 頻偏下最大綜合矢量誤差Fig.7 Maximum total vector error under frequency deviation
4 結(jié)束語
本文提出了一種基于改進(jìn)矩陣束的同步相量測量算法.通過引入矩陣束算法能夠在不同干擾情況下精確測量電網(wǎng)基波頻率的優(yōu)勢,結(jié)合二階多頻動態(tài)相量模型可以表征同步相量變化率和加速度的特點,本文提出的算法能夠精確表示電網(wǎng)信號的動態(tài)特性,同時也能降低諧波與間諧波成份的干擾.實驗結(jié)果顯示,該方法無論是在頻率偏差情況下,還是在電壓幅值調(diào)制情況下,均有較好的測量性能,可以精確測量電網(wǎng)信號的幅值、相角和頻率參數(shù).此外,利用同步相量檢測規(guī)范中的測試案例,驗證了提出算法的精確度和魯棒性,具有一定的工程應(yīng)用價值.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00