基于自抗擾控制的永磁同步電機伺服控制系統*
2022-02-16 08:32:54王志達丁勝奪
計算機與數字工程 2022年1期
王志達 韓 亮 丁勝奪
(中國石油集團安全環保技術研究院有限公司HSE信息中心 北京 102206)
1 引言
永磁同步電機因其效率高、扭矩大、使用壽命長而越來越受到人們的青睞[1],但在實際應用中,其結構和控制電路性能的影響制約了永磁同步電機的發展,而良好的控制系統可以顯著提升其性能[2],因此,電機控制系統的設計具有重要意義。
在電機控制系統中,伺服控制占有重要地位[3]。最初廣泛采用PID 控制實現電機伺服控制,該控制方法具有結構簡單,運算量小,魯棒性強等優點,因此被廣泛應用于對控制精度和響應速度不高的控制領域中[4~10]。在后來的研究中提出了以現代控制理論為基礎的控制方法,如滑模變結構控制[11~18],自適應控制[19~20]等,增加了控制的精度,但存在抖動、系統開銷大、難以滿足伺服控制系統快速響應要求的問題。隨著人工智能技術的發展,研究人員提出智能控制方法,該方法不依賴或不完全依賴被控對象的數學模型,而是以實際的控制效果為指標進行控制,能夠充分考慮到系統的不確定性,如模糊控制、神經網絡控制[21~24]等,但目前存在依賴經驗、專家知識、數據使得控制精度難以保證的情況。
自抗擾控制器(ADRC)具有結構明晰、算法簡單、響應速度快、控制精度高,對受控對象模型的不確定性因素和外擾具有優良的適應性和魯棒性的特點[25~26],能夠準確地實時估計系統的總擾動,對于系統內部干擾和外部干擾,隨機干擾和固定的干擾都具有很好的估計效果,將估計的擾動值補償給閉環系統的輸入,把一個復雜的系統變換成為一個簡單的線性系統,從而使閉環系統獲得良好的控制性能,可有效提高伺服控制系統的性能[27]。
2 數學模型
2.1 控制系統結構
基于自抗擾控制的永磁同步電機伺服控制系統如圖1 所示。該控制系統包含位置環控制器、電流環控制器以及磁場定向控制(FOC)部分,其中位置環采用自抗擾控制,包含微分跟蹤器、非線性組合以及擴張狀態觀測器。微分跟蹤器為參考輸入安排過渡過程并提供高信噪比的微分信號,提高了系統的穩定性,擴張狀態觀測器可以用來跟蹤系統各狀態變量并估計出系統模型的不確定因素和干擾的實時值,線性反饋控制律通過誤差及誤差的微分的組合產生需要的電流值[25~26]。電流環采用PI控制。FOC 部分包含Park 逆變換、SVPWM、Park 變換以及Clarke變換。該控制結構魯棒性強,可有效提高伺服控制的精度。
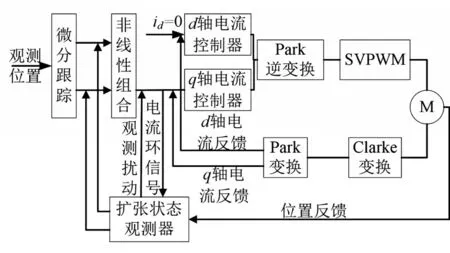
圖1 伺服控制系統結構
2.2 永磁同步電機數學模型
永磁同步電機的定子采用三相對稱繞組,轉子為永磁體,定轉子通過氣隙磁場相互作用,存在電磁耦合關系。永磁同步電機在d-q 軸坐標系下的數學模型如下[1]:

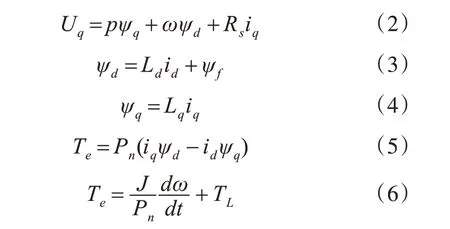
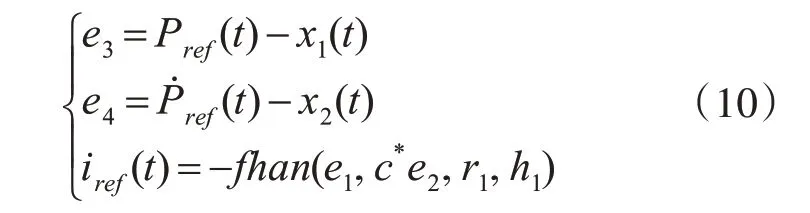
式中,ψd、ψq為d、q 軸磁鏈,Rs為定子電阻,id、iq為d、q 軸電流,Ld、Lq為d、q 軸電感,ψf轉子磁鋼在定子上的耦合磁鏈,Te為電磁轉矩,Pn為極對數,TL為負載轉矩,J為轉動慣量。
由式(1)~(6)可得電磁轉矩的另一表達式:

2.3 位置環控制器
ADRC 控制器包括微分跟蹤器,擴張狀態跟蹤器,和線性反饋控制律,針對伺服控制系統,微分跟蹤器表達式如下:
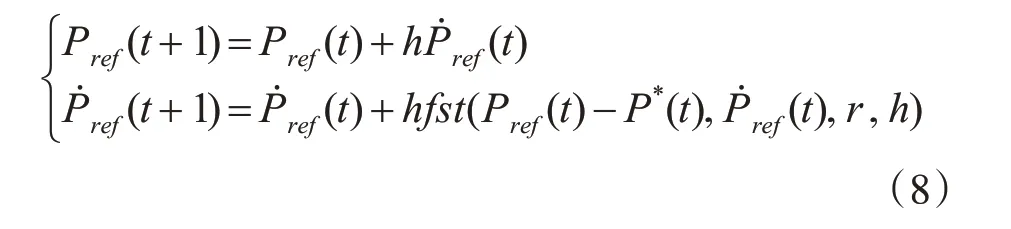
式中,Pref為電機參考位置,P˙ref為電機參考位置信號的微分,即電機的轉速,r,h 為系統待調參數,fst為快速控制最優綜合函數。
擴張狀態觀測器用來獲取測量轉速信號的跟蹤值及其微分信號,其表達式如下:
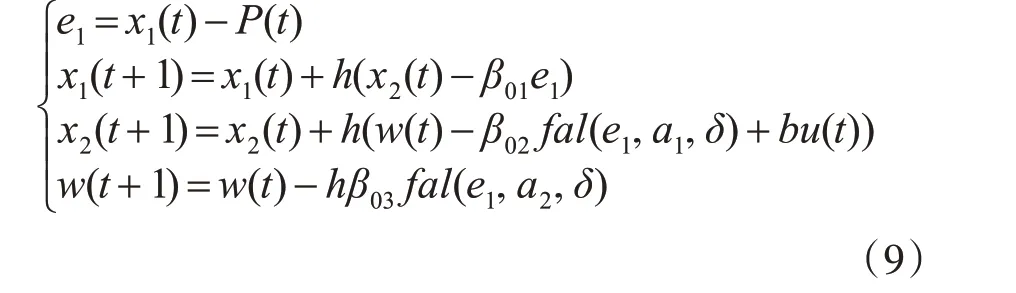
式中,x1為測量電機位置的跟蹤信號,P 為測量轉速信號,x2為測量電機位置的微分信號,即觀測的電機轉速,w為擾動的跟蹤信號,u 為輸入電機的參考電流值,β01、β02、β03、b、a1、a2為系統的待調參數,fal為系統函數。
線性反饋控制律通過誤差及誤差的微分的組合產生需要的電流值iref,表達式如下:
式中,e3為位置的誤差值,e4為轉速的誤差值。
3 仿真分析
本節利用Matlab/Simulink 平臺進行仿真,仿真所用電機參數如表1所示,仿真模型如圖2所示,模擬時采用ode23tb 算法,模擬時間為10s,最大時間步長0.00125s,分別分析不同負載轉矩及系統擾動條件下的控制誤差。
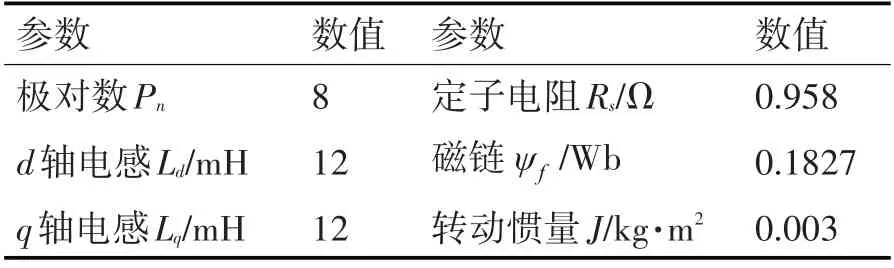
表1 仿真用永磁同步電機參數
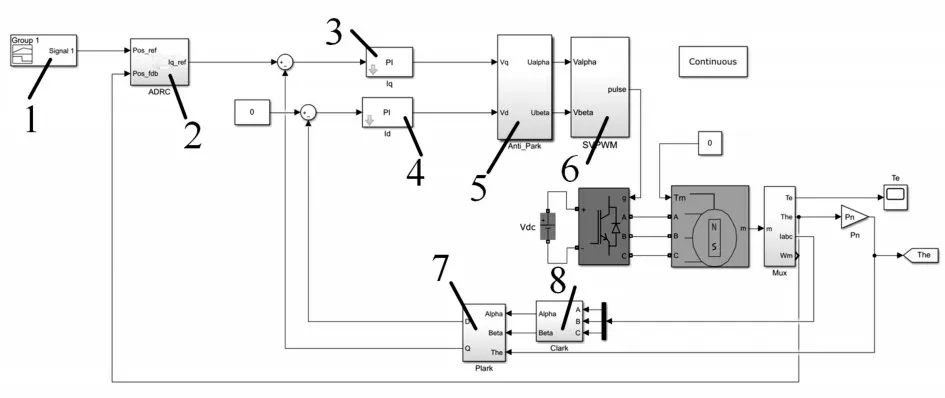
圖2 伺服控制系統仿真模型
ADRC控制器的仿真模型如圖3所示。該控制模型包含微分跟蹤器(TD),非線性組合(NonLC)和擴張狀態觀測器(ESO)三部分,三部分均采用S 函數搭建。位置參考信號經微分跟蹤器平滑后與擴張狀態觀測器觀測值比較產生偏差信號,該偏差信號經非線性組合運算后與擴張狀態觀測器觀測出的擾動信號疊加得到q軸電流參考信號。
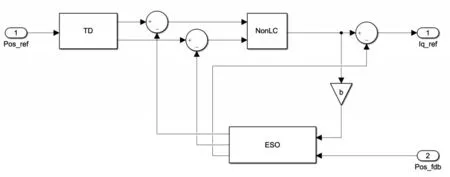
圖3 ADRC控制器仿真模型
階躍負載轉矩影響下電機伺服誤差如圖4 所示,伺服跟蹤控制效果如圖5 所示。仿真時負載轉矩為階躍式,初始幅值為0,階躍后幅值為2N·m,在5s 時產生幅值階躍。由圖可以看出,伺服跟蹤控制效果較好,曲線無明顯超調。當電機空載轉動控制偏差隨轉速的增加逐漸增大,2s~4s 電機勻速運動,控制偏差保持在0.13°,4s 后電機減速運動,控制偏差逐漸減小,突然施加負載轉矩時,控制偏差并未產生明顯變化,控制偏差最小值為0.11°。隨后電機帶載運動,控制偏差變化規律與空載時相同,并未明顯受負載轉矩影響,由此可以看出,該位置控制系統魯棒性較強,可有效抵抗階躍型負載轉矩的影響。

圖4 階躍負載轉矩下電機伺服誤差
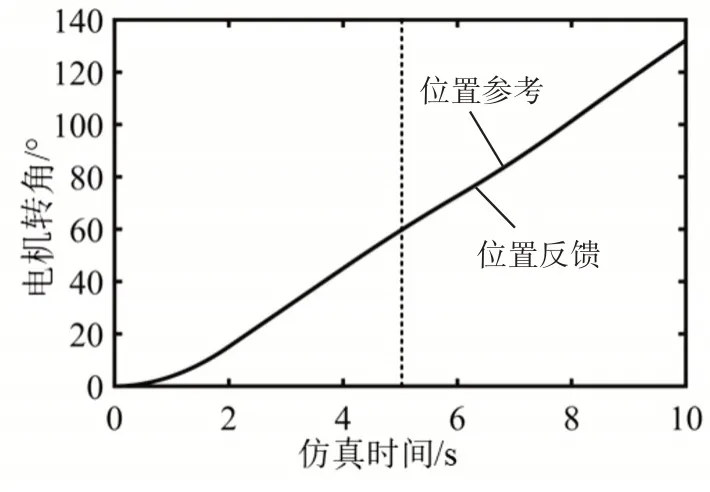
圖5 階躍負載轉矩下電機轉角變化
階躍負載轉矩條件下電機轉速變化情況如圖6 所示。由圖可以看出,伺服控制時電機轉速與規劃轉速幾乎一致,且電機轉速波動較小,波動最大值為100rpm。在電機啟動階段,電機轉速與規劃轉速偏差較小,階躍載荷幾乎對電機轉速無影響,當電機帶載運動時,由于負載轉矩的影響,電機轉速波動略微增加。
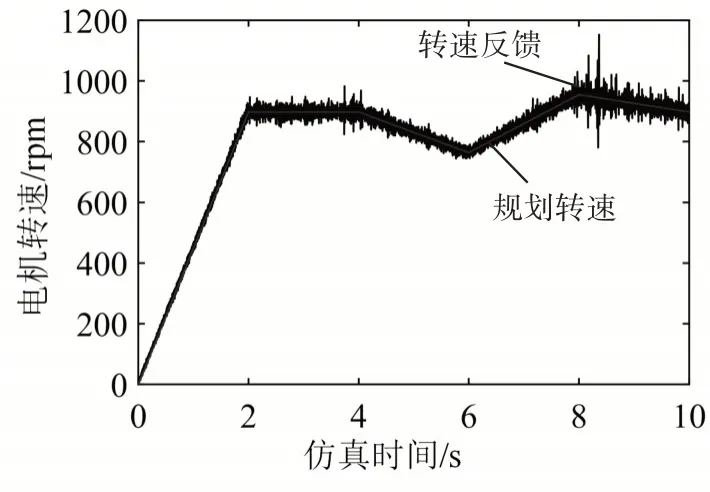
圖6 階躍負載轉矩下電機轉速變化
交變負載轉矩與系統擾動作用下電機伺服誤差如圖7所示,控制效果如圖8所示,其中交變負載轉矩為幅值為3N·m,周期為1s 的正弦信號,系統擾動為隨機信號。由圖可以看出,交變負載轉矩與系統擾動對該控制系統影響很小。位置誤差隨電機轉速的增加逐漸增大,在2s 以后,交變負載轉矩與系統擾動對于控制系統具有輕微影響,位置誤差最大值為0.13°,最小值為0.11°。通過與圖4、圖5對比可以看出,位置偏差幾乎未發生變化,由此可以說明該控制系統具有較強的魯棒性。
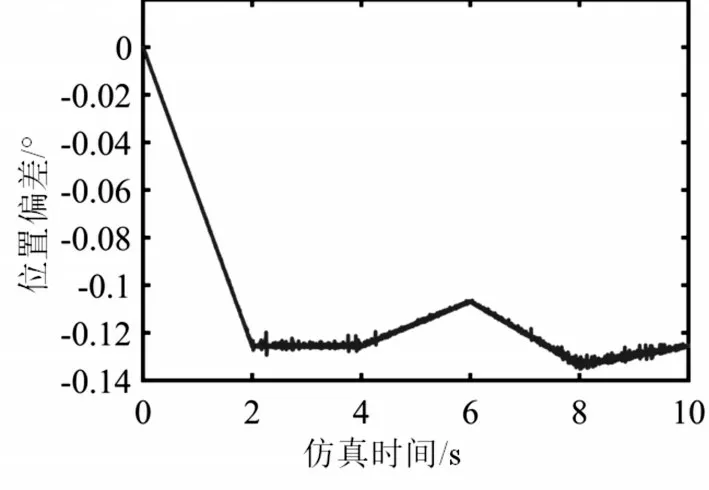
圖7 交變負載轉矩與系統擾動作用下伺服控制誤差
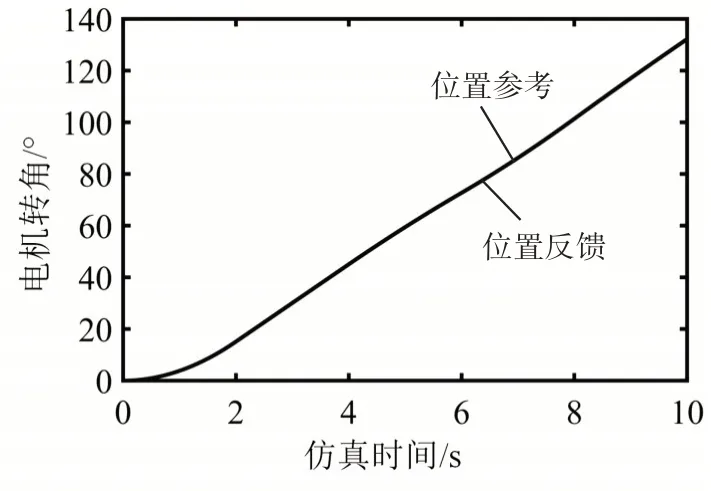
圖8 交變負載轉矩與系統擾動作用下電機伺服效果
交變負載轉矩與系統擾動作用下電機轉速變化如圖9 所示。由圖可以看出,交變負載轉矩與系統擾動主要影響2s 以后電機的轉速,但電機的轉速變化與規劃值幾乎一致。對比圖6 可以看出,交變負載轉矩與系統擾動對系統的影響更大,該控制系統具備較強的魯棒性,且可自動補償系統擾動。
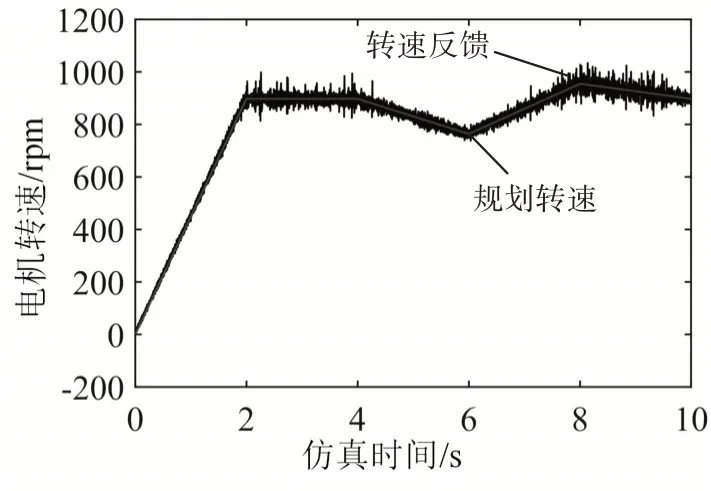
圖9 交變負載轉矩與系統擾動作用下電機轉速
4 實驗
隨后采用實驗驗證該控制系統的性能。實驗時采用實驗儀器如圖10 所示,其中旋變用于測量電機的位置,控制板用于生成控制信號,驅動板用于驅動電機轉動,上位機通過CAN 卡與下位機通信。負載轉矩近似呈正弦規律變化,幅值為3.5N·m,與模擬時采用的負載轉矩較為吻合,如圖11 所示。
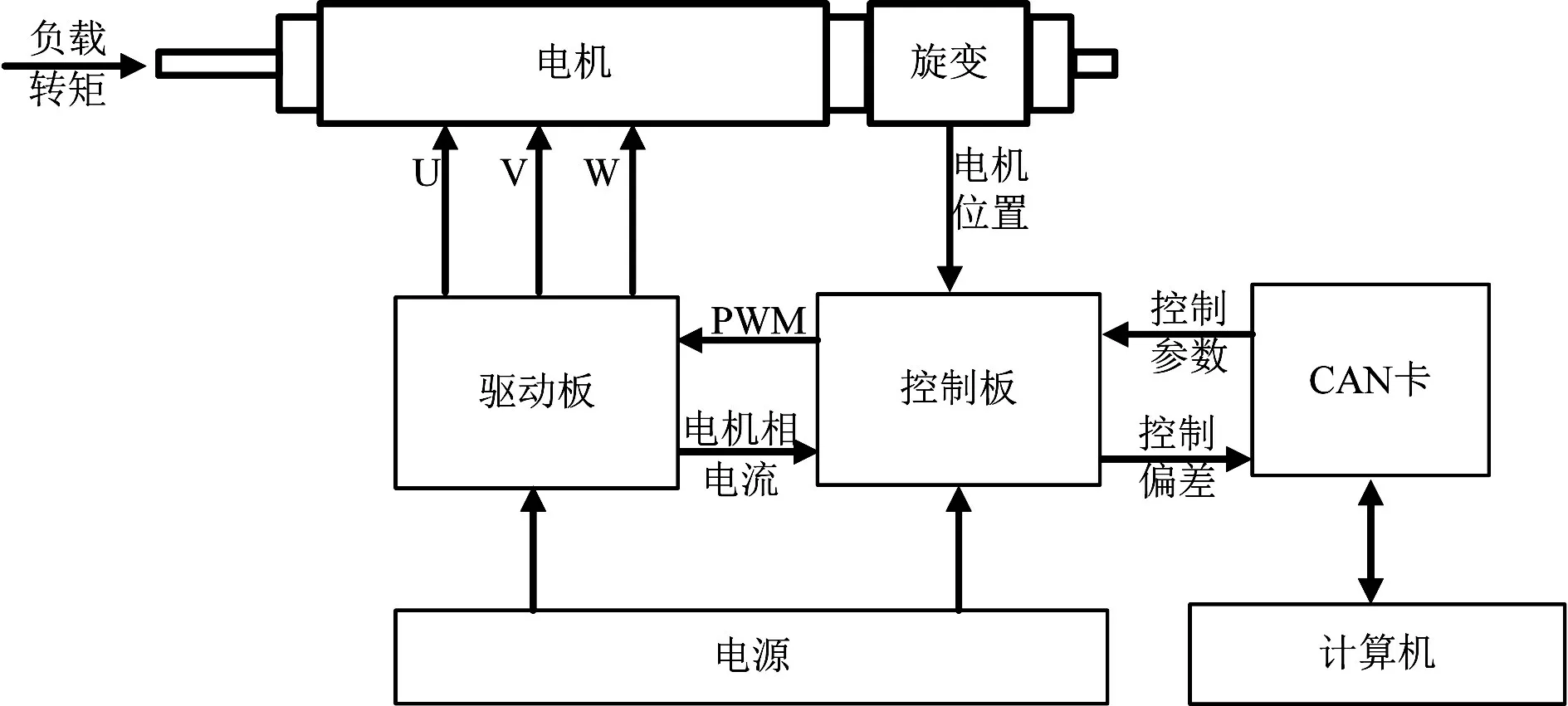
圖10 實驗平臺
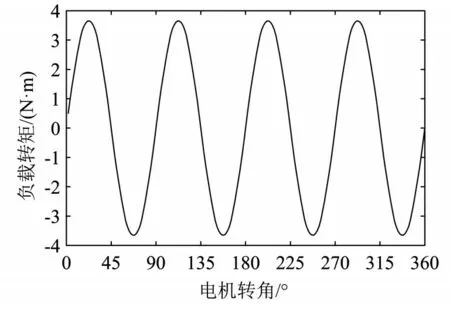
圖11 負載轉矩特性
實驗結果如圖12 所示。由圖12(a)和(b)可以看出,在交變負載轉矩下,電機位置誤差呈交變狀態,最大為0.6°。電流環控制誤差變化劇烈,變化范圍為-0.4A~0.3A,這是由于負載轉矩呈交變狀態,控制時為適應負載轉矩,電機電流不斷變化,使得電機的轉速不穩定,進而導致位置偏差劇烈波動。由此可以看出,該控制系統的魯棒性較好,在交變負載轉矩下仍可保持較高的控制精度。
5 結語
本文以設計強魯棒性伺服控制系統為目標,基于自抗擾控制理論,提出基于自抗擾控制的永磁同步電機伺服控制系統,并采用仿真驗證控制系統的性能,得到如下結論。
1)電機空載運動時,控制誤差隨電機轉速增加而增大,最大值為0.13°,階躍負載對控制系統幾乎無影響,在恒定負載轉矩作用下控制誤差最小值為0.11°。電機轉速與規劃轉速幾乎一致。
2)交變負載轉矩與系統擾動作用下電機控制誤差最大值為0.13°,最小值為0.11°,與空載情況幾乎相同,電機轉速未發生明顯變化,由此可以看出,該控制系統具有較強的魯棒性。
3)實驗表明在幅值為3.5N·m 的交變負載轉矩下電機位置誤差呈交變狀態,最大為0.6°。電流環控制誤差變化劇烈,變化范圍為-0.4A~0.3A,該控制系統具有較強的魯棒性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25