AUV 回收對接前景視場立體匹配算法研究*
2022-02-16 08:32:46戴文文曾慶軍朱志宇劉維亭郭雨青
計算機與數(shù)字工程 2022年1期
戴文文 曾慶軍 趙 強 朱志宇 劉維亭 郭雨青
(江蘇科技大學(xué)電子信息學(xué)院 鎮(zhèn)江 212003)
1 引言
AUV 由于其攜帶的能源有限,航行時間以及航行距離受到限制,所以AUV 水下回收對接已經(jīng)成為了世界各國研究的重點。目前美國、英國、德國、日本等國家對于AUV 水下回收對接的研究較為成熟,國內(nèi)在AUV 方面的研究主要集中于中國科學(xué)院沈陽自動化研究所、浙江大學(xué)以及哈爾濱工程大學(xué)等單位。各國科學(xué)家根據(jù)不同AUV 的特點以及不同的對接目標,設(shè)計了不同的AUV 回收對接系統(tǒng),大致可分為五類,1)水下箱(籠)式對接;2)機械手或載體輔助式對接;3)繩索或桿類引導(dǎo)對接;4)平臺阻攔索式對接;5)喇叭口式引導(dǎo)對接[1]。在AUV 回收對接過程中,對AUV 的前景視場進行三維重建,能夠提高末端導(dǎo)航定位的精度,也能為實時路徑規(guī)劃提供環(huán)境信息。本文采用雙目攝像機作為三維重建的傳感器。
目前采用雙目作為環(huán)境探測器的AUV 不多,在國外,日本東京大學(xué)2005年將Twin-Burger2AUV與雙目立體視覺結(jié)合,檢測和識別水中的浮游生物[2]。美國斯坦福大學(xué)ARL 實驗室與MBARI(Monterey Bay Aquayium Research Institute)聯(lián)合開發(fā)的一個半自治水下機器人OTTER(Ocean Technology Testbed for Engineering Resaeach),可用作各種水下自治技術(shù)的開發(fā)和驗證試驗平臺[3~4]。澳大利亞國立大學(xué)開發(fā)的AUV 用于海底探索和監(jiān)測,它由兩個防水艙中安裝著兩臺攝像機,組成一個雙目視覺系統(tǒng)[5]。在國內(nèi),哈爾濱工程大學(xué)水下機器人技術(shù)重點實驗室研制的WL-3 AUV,采用雙目攝像機作為傳感器,對接近距離段采用雙目視覺導(dǎo)引,實現(xiàn)光視覺導(dǎo)航定位。哈爾濱工程大學(xué)的姜言清等人研究了基于雙目視覺的AUV 回收對接關(guān)鍵技術(shù),將光視覺用于對接階段的導(dǎo)航,有效地提高了導(dǎo)航精度,保證了導(dǎo)航信息的平穩(wěn)輸出[1]。AUV三維重建實質(zhì)是水下三維重建,Brandou V[6]等利用立體視覺系統(tǒng)IRIS,對水下同一物體拍攝多組照片,利用圖像分割算法實現(xiàn)三維重建。Yau T[7]等用多個攝像機利用傳統(tǒng)PMVS 算法實現(xiàn)了對水下物體的三維重建,取得了很高的精度,但是其成本較高且使用的環(huán)境受到限制。R.Ferreira[8]等利用等效焦距的方法來補償水下折射對水下成像的影響。國內(nèi)哈爾濱工程大學(xué)的吳云峰[9]將空氣中的三維重建算法應(yīng)用于水下,對水下折射以及散射未進行充分考慮,效果不是很理想。哈爾濱工業(yè)大學(xué)的喬金鶴[10]分析了水下成像的特點,并對角點檢測以及三維重建方法進行了研究,由于場景的限制,檢測出了很多的無用角點,增加了計算的成本。
本文結(jié)合自主研發(fā)的全驅(qū)動AUV,配備雙目攝像機進行水下三維重建,采用改進的CENSUS 變換與最小生成樹結(jié)合的立體匹配算法實現(xiàn)水下雙目圖像的立體匹配,利用圖像梯度強度以及顏色信息融合的CENSUS 變換計算匹配代價,基于最小生成樹算法進行代價聚合,提高匹配效率以及精度,最后配合亞像素精化實現(xiàn)視差優(yōu)化并通過實驗驗證算法有效性。
2 AUV回收對接系統(tǒng)總體結(jié)構(gòu)
2.1 AUV回收過程
本文使用自主研發(fā)的水下自主機器人實現(xiàn)AUV 的水下回收對接。AUV 回收對接過程,包括以下幾個階段,如圖1所示。

圖1 AUV回收對接過程示意圖
第一個階段為直線歸位階段,這個過程重點在于利用超短基線提供的相對位置、姿態(tài)信息來調(diào)整AUV 與對接裝置的位置,使得在消耗較短對接中軸線距離的情況下,將AUV 航行至中軸線上,同時要考慮到AUV 的姿態(tài)盡可能地與中軸線一致,利于進一步實時對接。第二個階段為直線跟蹤階段,這個階段是指AUV 重心進入中軸線開始直到距離對接口3m~5m 的階段。在這個階段要保證AUV 沿中軸線航行,且艏向角指向?qū)涌凇.擜UV 到達對接就位點時,進入下一階段,AUV 根據(jù)對接裝置口的燈光進行姿態(tài)校準,調(diào)整艏向指向?qū)涌冢3趾线m的航姿進行直線運動,直到運動到慣性對接點處,關(guān)閉推進器依靠慣性進入對接口。
2.2 三維重建過程
本文AUV 前景視場雙目三維重建的過程如圖2 所示,AUV 在回收對接過程中,左右攝像機分別采集前景圖像,通過一系列圖像預(yù)處理過程消除或緩解水對光成像的影響,接著將左右攝像機拍攝到的對應(yīng)圖像進行匹配,得到對應(yīng)點的視差,形成視差圖,繼而根據(jù)攝像機標定得到的內(nèi)外參數(shù)算出場景深度D,以及圖像中各點的三維坐標[11],最后根據(jù)三維坐標進行三維重建。
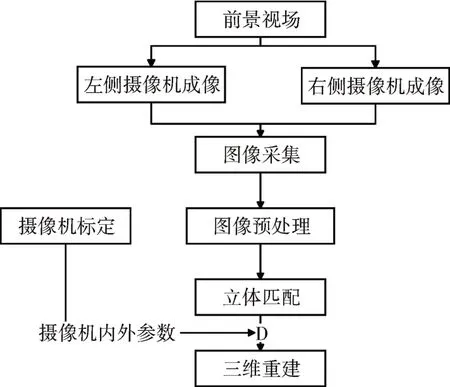
圖2 前景視場雙目三維重建過程圖
3 立體匹配算法原理
由于本文的研究對象為AUV,其工作環(huán)境有其特殊性,在水下AUV 前景視場的三維重建需要考慮水對光成像的影響。本文對水下圖像進行預(yù)處理將其恢復(fù)成空氣圖像,然后再運用空氣中雙目處理的方法進行立體匹配以及三維重建。運用此方法使得立體匹配步驟簡化,不需考慮水下成像的特殊條件。立體匹配的過程大致分為四個階段:代價計算、代價聚合、視差計算、視差優(yōu)化等[12]。針對水下圖像弱紋理區(qū)域以及重復(fù)紋理區(qū)域較多的問題,本文采用改進的CENSUS 變換立體匹配代價算法,結(jié)合最小生成樹代價聚合方法實現(xiàn)視差計算,精度相對較高,運算速度較快,滿足AUV 回收對接的要求。
本文算法首先采用改進的CENSUS 變換實現(xiàn)代價計算,實現(xiàn)弱紋理以及重復(fù)紋理區(qū)域代價更好的計算,再采用基于最小生成樹的立體匹配代價聚合算法進行代價聚合,該算法可以在全圖建立像素間的關(guān)系,使得像素間的關(guān)系一目了然,不再受到窗口的約束,可以極大減少代價聚合所花費的時間,使得立體匹配精度得到提高,接著采用優(yōu)勝者全選(Winner-Takes-All,WTA)算法計算得到代價最小的視差值,最后采用亞像素精化對視差進行平滑優(yōu)化,實現(xiàn)最終視差圖的輸出。算法流程圖如圖3所示。
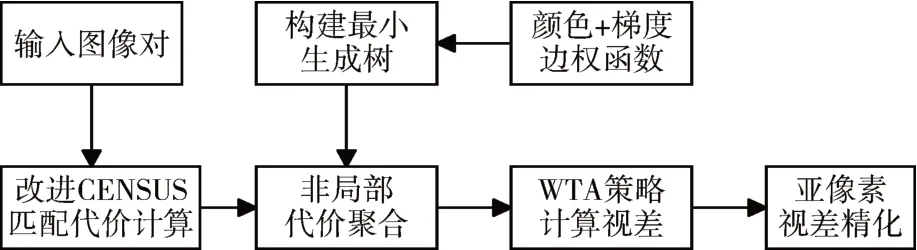
圖3 立體匹配算法流程圖
3.1 代價計算
因為水下圖像弱紋理以及重復(fù)紋理區(qū)域較多,這些區(qū)域像素值分布均勻,傳統(tǒng)的CENSUS 變換極易受中心像素點的影響,在弱紋理及重復(fù)紋理區(qū)域效果不理想,所以采用改進的CENSUS 變換實現(xiàn)立體匹配代價計算。此方法將某一像素點的梯度強度與顏色信息進行融合后的結(jié)果作為該像素點的像素值,改進的CENSUS 變換,對窗口中每一個像素與中心像素進行比較,大于中心像素即為0,否則為1,從而得到一個二進制系列,分別對雙目圖像的左圖和右圖計算每個像素的匹配代價。
梯度強度與顏色信息融合函數(shù)如下式所示:
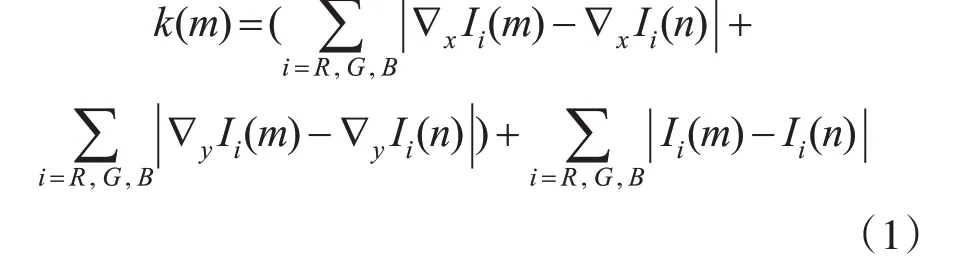
其中n是m的領(lǐng)域點,?x,?y分別表示圖像在x和y方向上的梯度,Ii(m),Ii(n)分別表示雙目左右圖像對應(yīng)點的i通道值。
CENSUS變化公式如下:
其中,p為中心像素點,q為窗口內(nèi)其余像素點,Np為以p為中心的矩形窗口,B(p) 表示改進CENSUS 變換后得到的比特串,ζ表示將各位按位連接,k(p)表示中心像素點梯度強度與顏色信息融合值,k(q)表示窗口內(nèi)除中心像素點外梯度強度與顏色信息融合值。
當視差為d時計算漢明距離得到初始立體匹配代價。漢明距離計算公式為

其中,CCTL、CCTR分別為左右圖像經(jīng)改進CENSUS變換后的圖像。所以改進CENSUS 變換的匹配代價計算模型為

其中,λ為歸一化常數(shù)。
3.2 代價聚合
基于最小生成樹的匹配代價聚合算法首先將圖像表示成無向圖G(V,E),其中V是所有圖像像素節(jié)點,E為連接節(jié)點的邊,然后通過KRUSKAL算法,生成最小生成樹。通過最小生成樹中權(quán)重的大小定義圖像像素之間的聯(lián)系,經(jīng)過自頂向下以及自底向上兩次遍歷就能得到全圖所有像素的聚合值,天然建立全圖像素間的關(guān)系,提高像素代價計算的準確度。采用三通道顏色及梯度特征計算最小生成樹的邊權(quán)值,公式如下:
其中q是p的領(lǐng)域點,Ii(p),Ii(q)分別表示左右圖像對應(yīng)點的i 通道值,?x,?y分別表示圖像在x和y方向上的梯度。相似度r決定了圖像中的一個像素對另一個像素的聚合貢獻度權(quán)重:

其中α為調(diào)節(jié)像素相似度的常數(shù)。
根據(jù)最小生成樹的樹結(jié)構(gòu)可得像素聚合值為[13]:

3.3 視差計算與優(yōu)化
然后根據(jù)WTA 算法,采用優(yōu)勝者全選方式,選取對應(yīng)匹配代價最小的視差作為最終的視差。
為了減少視差選取過程中引起的視差不連續(xù)性,運用了一種基于式(9)二次多項式插值的亞像素估計算法。由于采用WAT 算法選取的視差都為整數(shù),是離散的,導(dǎo)致視差圖不連續(xù)。為了消除這種影響,本文使用二次多項式逼近三個離散視差候選點之間的視差:d、d_ 和d+ 。d是WTA 算法所選取的視差值,d_=d-1,d+=d+1。
亞像素視差增強采用二次多項式插值。經(jīng)過亞像素細化將基于改進的CENSUS 變換的算法得到的視差圖進行了連續(xù)化以及精細化。
4 實驗結(jié)果與分析
本文在操作系統(tǒng)為Windows10、CPU 為酷睿i5、處理器為2.20GHz,系統(tǒng)內(nèi)存為8G 的普通PC上,運用VS2017配合OpenCV視覺庫實現(xiàn)了立體匹配算法。
4.1 標準圖像實驗結(jié)果
為了驗證算法的有效性,本文設(shè)置了三組對比實驗,采用Middlebury 網(wǎng)站的立體匹配算法評價方法進行測評。采用網(wǎng)站提供的Teddy,Tsukuba以及cones 三對圖像進行對比實驗,在VS2017 中進行改進的CENSUS 變換與最小生成樹結(jié)合的立體匹配算法進行實驗。圖4(a)為三幅圖像的左視圖,(b)為三對圖像的真實視差圖,(c)為基于顏色與梯度融合結(jié)合高通濾波器算法(GRD+GF)效果圖,(d)為最小生成樹算法(MST)效果圖,(e)為傳統(tǒng)CENSUS 變換結(jié)合最小生成樹算法(CEN+MST)的效果圖,(f)為本文算法效果圖。
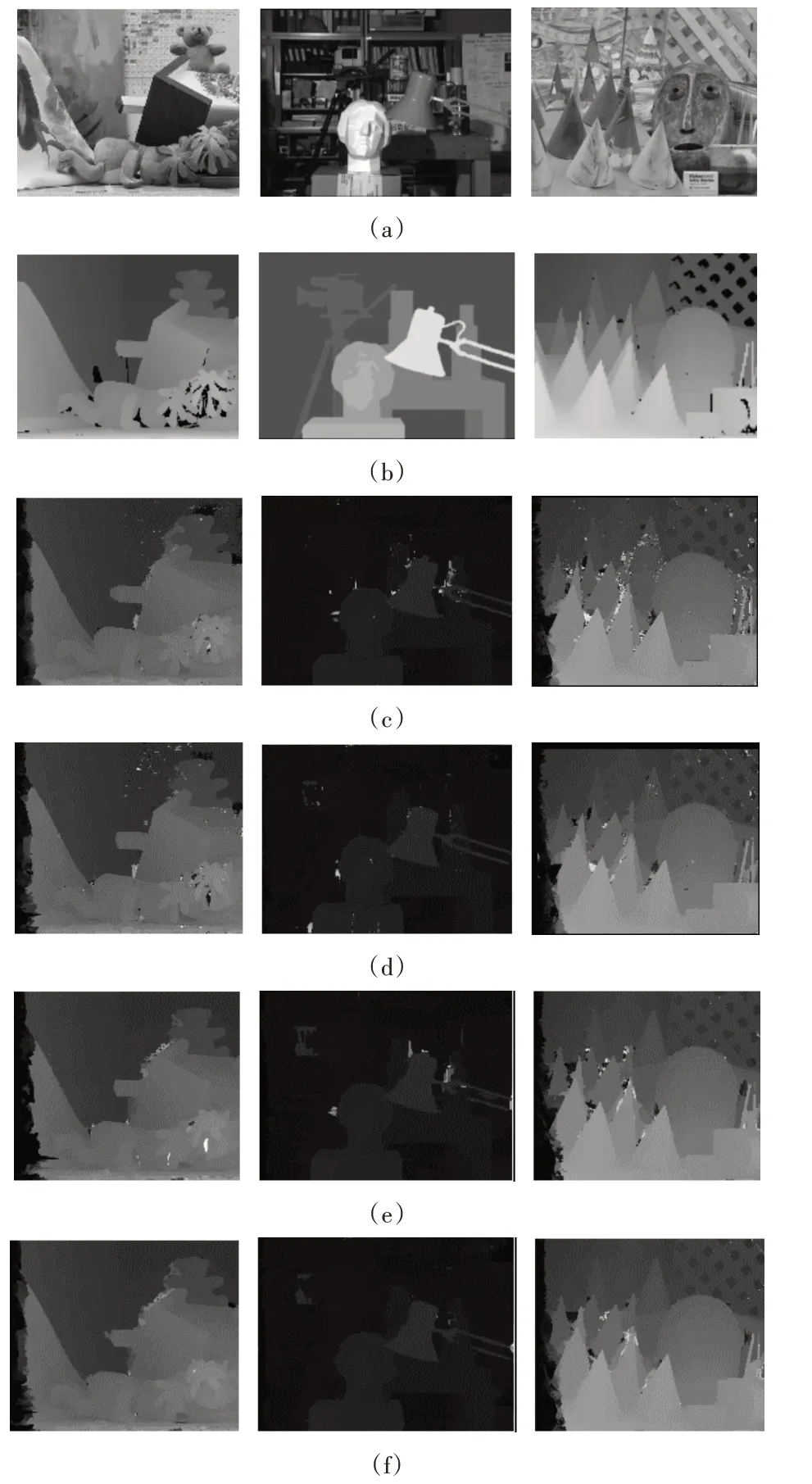
圖4 Middlebury網(wǎng)站圖像在不同算法下的視差圖
由圖4 可以看出,本文所提算法在深度不連續(xù)的區(qū)域以及弱紋理、重復(fù)紋理區(qū)域均能得到較好的匹配結(jié)果,在遮擋處的匹配率也較高,本文算法在視覺效果上效果更好。
圖像匹配質(zhì)量的好壞采用誤差匹配率以及平均誤差率進行定量分析,表1 表示非遮擋區(qū)域(non)、深度不連續(xù)區(qū)域(dis)和全部區(qū)域(all)的誤匹配率。
從表1 數(shù)據(jù)可知,GRD+GF 算法的平均誤差率為8.16%,MST 算法的平均誤差率為7.66%,CEN+MST 算法的平均誤差率為6.69%,本文算法的平均誤差率為6.02%,通過分析可以看出本文算法較GRD+GF 算法、MST 算法和CEN+MST 算法平均誤差率分別降低了2.08 個百分點、1.64 個百分點和0.67個百分點。雖然本文算法在處理Teddy圖像時誤差率增高,但是從整體看,誤差匹配率在四種方 法中是最低的。
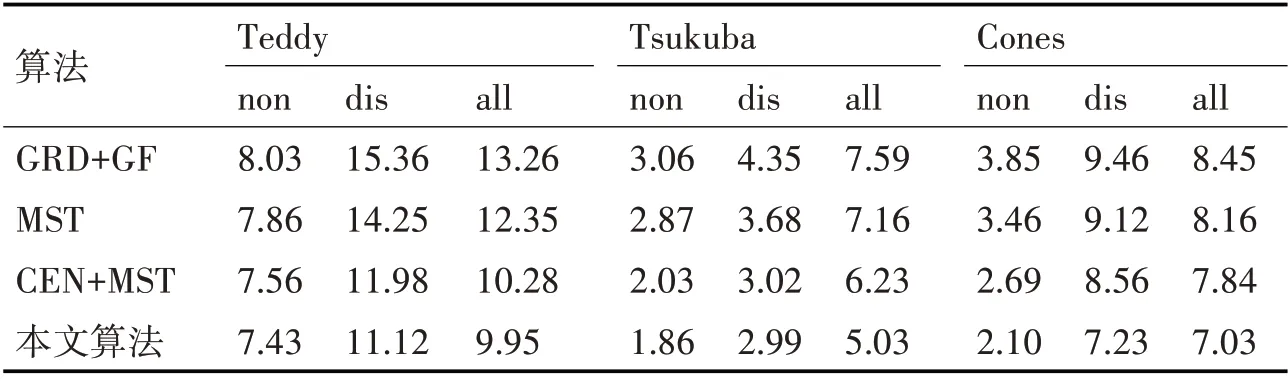
表1 Middlebury網(wǎng)站圖像視差圖評價結(jié)果(單位:%)
4.2 AUV雙目圖像實驗
4.2.1 圖像采集
在AUV 前端裝載雙目攝像機視覺傳感器,以實現(xiàn)AUV 前景視場的三維重建。為了驗證算法的有效性,在游泳池進行了圖像采集實驗,圖5(a)為在游泳池運行AUV采集2560*720分辨率水下雙目圖像的實驗圖,(b)為裝載在AUV 前端經(jīng)過防水密封處理的雙目攝像機實物圖。表2 為實驗所用雙目攝像機參數(shù)。
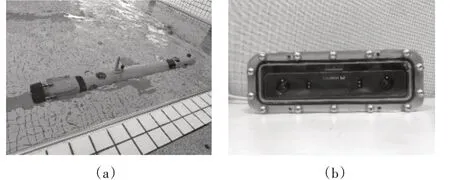
圖5 泳池實驗圖

表2 雙目攝像機參數(shù)
4.2.2 立體匹配算法實驗
采用上小節(jié)拍攝得到的雙目圖像進行立體匹配算法實驗與分析。圖6 為經(jīng)過圖像預(yù)處理后的2560*720 分辨率的雙目水底圖像,(a)為左圖,(b)為右圖。

圖6 預(yù)處理后雙目圖像
在VS2017 中對雙目圖像運行改進的CENSUS變換與最小生成樹結(jié)合的立體匹配算法進行實驗。
圖7 為真實水下圖片進行處理后得到的視差圖,(a)為GRD+GF 算法效果圖,(b)為MST 算法效果圖,(c)為CEN+MST 算法效果圖(d)為本文算法所運行得到的效果圖,由圖7 可以看出在真實圖片下,無紋理區(qū)域以及重復(fù)紋理較多的情況下,前兩種傳統(tǒng)的立體匹配算法無法得到有效的視差圖,MST 算法得到的視差圖有空洞,不連續(xù),在弱紋理區(qū)域精度較差,而本文算法下的視差圖中視差連續(xù),在弱紋理區(qū)域得到較好結(jié)果,有利于后續(xù)深度圖的計算以及三維重建。視差圖中背景部分黑色是因為攝像頭有120°視角,導(dǎo)致左圖中一部分在右圖中無法找到對應(yīng)點,所以置為最大值。
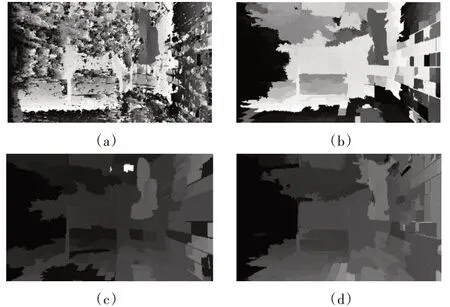
圖7 真實場景圖像不同立體匹配算法結(jié)果對比
5 結(jié)語
前景視場三維重建作為AUV 回收對接中的重要一環(huán),能夠提高末端導(dǎo)航定位的精度。本文針對AUV 自主回收對接水下環(huán)境,對水下三維重建中的立體匹配步驟進行了研究。采用改進的CENSUS 變換與最小生成樹相結(jié)合的立體匹配算法對雙目圖像進行立體匹配,該算法以圖像的梯度強度及顏色信息融合作為CENSUS 變換的依據(jù)計算匹配代價,解決水下圖像弱紋理以及重復(fù)紋理較多的問題,結(jié)合最小生成樹匹配代價聚合算法得到視差圖,算法運算量小,運行速度快,效率高。最后運用VS2017 軟件對Middlebury 標準圖像集進行立體匹配實驗,相較于GRD+GF 算法、MST 算法和CEN+MST 算法平均誤差率分別降低了2.08 個百分點、1.64個百分點和0.67個百分點,同時還在真實水下雙目圖像上驗證了本文算法針對水下圖像弱紋理區(qū)域以及重復(fù)紋理區(qū)域較多問題的有效性。下一步將在本文立體匹配結(jié)果基礎(chǔ)上實現(xiàn)AUV 前景視場的三維重建。