高速斜入水和水平入水氣炮水箱實驗系統*
2022-02-11 09:35:18劉二偉徐勝利左金東
爆炸與沖擊 2022年1期
劉二偉,徐勝利,周 杰,左金東
(1. 清華大學航天航空學院,北京 100084;2. 中國科學技術大學工程科學學院,安徽 合肥 230026)
具有重要應用前景的跨介質入水飛行器近年來得到廣泛研究。和空氣或水的單介質相比,氣水介質密度相差約800 倍,黏性系數相差約59 倍,導致相同條件下飛行器所受阻力相差較大。對高速入水而言,該研究包含多相、動邊界、尾部強湍流、相變和結構響應動力學、縮尺實驗有效性等問題,如卷入空氣或自然空化出現多相流場,高速入水產生的沖擊載荷會引起飛行器結構動態變形和損傷。此外,高速入水實驗涉及水空化壓力和材料強度等絕對物理量模擬,采用相似率和相似參數等傳統實驗流體力學方法有較大局限性。考慮到實驗涉及寬范圍的模型尺度(10~10mm)、質量(10~10g)和速度(10~10m/s),需建造較大尺度實驗裝置,再現高速入水物理力學過程,評估模型尺度效應對空化或卷入氣泡、吸能材料和結構強度等的影響。分析表明:立式和臥式氣炮與水箱組成的實驗系統是較適合斜入水和水平入水的實驗模擬裝置。
氣炮可將不同質量和尺寸的飛行器模型加速到預定速度,被廣泛應用于結構沖擊動力學、高超聲速氣動物理現象研究,適合高速入水和水中航行的飛行器或發動機鳥撞、高速列車沖擊、降落傘開傘和攔阻索沖擊加載等實驗研究。早期一級氣炮多是軸向臥式火藥炮,結構和操作簡單,缺點是無法控制火藥燃燒速率、藥室燃氣壓力高、火藥燃氣腐蝕內壁導致保養困難和實驗重復性差等。另外,若改變模型速度需要重新設計火藥內彈道。同時,火藥高燃速和膛壓上升過快,導致模型(或活塞)加速度過大,可能導致上游驅動氣體產生激波并造成總壓損失。一級氣炮適合驅動大質量實驗模型至低速狀態,二級和多級氣炮適合發射小質量實驗模型至高速狀態。在結構上,二級氣炮在一級氣炮壓縮管末端增加刻槽膜片并連接發射管(二級)和實驗艙,小質量模型位于膜片下游。當膜片破裂,驅動氣體在發射管加速模型運動。為提高驅動氣體膨脹做功能力,通常選擇聲速大、摩爾質量小的氣體,如氫氣和氦氣。為滿足更高速度范圍的實驗需求,如模擬空間碎片撞擊航天器,三級氣炮或組合驅動輕氣炮也有所研制。
已有對模型入水的研究分為垂直入水和傾斜入水。針對90°錐頭模型,黃振貴等用高速攝像拍攝了垂直低速入水的空泡形態演變過程,模型長度為44 mm,直徑為8 mm,速度為0~4.71 m/s。針對截錐頭模型,羅馭川等對比分析了不同模型低速傾斜入水現象,得到了頭部直徑大小對截錐頭模型入水空泡、運動速度、俯仰角的影響規律,模型長度為35 mm,直徑為2~4 mm,速度低于4 m/s。針對細長體模型,時素果等采用壓力傳感器測量模型表面壓力,獲得了模型高速入水過程中空泡形態和表面壓力變化規律,模型長度為800 mm,最大直徑為60 mm,速度為60 m/s。陳誠等在預制舵角下得到了細長體模型入水產生的空泡流型、尾部壓力和運動參數變化規律,對模型入水彈道偏轉過程進行了分析研究,模型長度為840 mm,最大直徑為60 mm,速度為70 m/s。針對平頭、卵形和截卵形頭部模型,張偉等拍攝了模型入水和空泡擴展的詳細過程,分析了頭型對模型入水彈道穩定性的影響,模型長度為28.4~43.6 mm,直徑為12.65 mm,速度為35~160 m/s。針對平頭和半球形頭部細長體模型,Chen 等對高速入水模型的彈道穩定性進行了實驗研究,分析了頭型、入水速度和角度對模型彈道穩定性的影響,模型長度為21~24 mm,直徑為6 mm,速度為44~144 m/s。綜合上述文獻,可以看出已有研究多針對低速入水(小于200 m/s),模型尺寸也較小。而高速入水和水中高速航行實驗目的是發射大質量、大尺寸實驗模型斜入水或水平入水,模型質量和速度變化范圍較大,要求實驗重復性好。因此,本文研制立式和臥式氣炮實驗系統,包括配套水箱和流場顯示測量等裝置,并給出模型高速斜入水和水平入水航行的初步實驗結果。
1 立式可變發射角一級/二級組合氣炮水箱系統
開展入射角度范圍較大(特別是小角度)斜入水實驗,軸向臥式結構布局存在局限性。圖1 所示為立式可變發射角一級/二級組合氣炮示意圖,包括高壓氣室、壓縮管、發射管和實驗艙(即水箱)等。

圖1 立式可變發射角二級氣炮示意圖Fig. 1 Schematic of the vertical two-stage gas gun with a rotated launch tube
立式可變發射角二級氣炮各部分的設計思路和結構簡要介紹如下:
(1)氣炮通常采用高溫高壓燃氣或常溫高壓空氣驅動重活塞(或模型)。考慮到使用成本和安全性等因素,高壓空氣驅動方式更為普遍。高壓氣室可分為兩類:一類是高壓力、小容積;另一類是低壓力、大容積。前者和火藥燃氣炮類似,氣室和重活塞尾部氣體壓比高,當氣路連通可能會形成聲速喉道,節流產生的稀疏波導致重活塞尾部壓力低、推力下降,即高壓空氣做功效率降低。本文氣室采用大容積、中低壓力(<4 MPa)方案,高壓氣罐內徑為320 mm,長為3 m,容積約為0.241 m,采用立式布置。氣罐高壓空氣由空氣壓縮機提供,最高可達4 MPa,滿足實驗使用需求。
(2)大容積氣室和氣炮壓縮管連接需設計快速閥,要求快速閥開啟時間為毫秒量級,以快速打開連接通道,這是氣炮研制的難點之一。和文獻[4]不同,本文中在壓縮管外側安裝環形充氣腔和大口徑球閥連接,并在充氣腔內周向設置8 個進氣道(長120 mm,寬15 mm),利用重活塞位置和自身長度(470 mm)形成活塞閥,當重活塞滑過進氣道,氣室和壓縮管相互連接實現側向進氣,消除側向進氣產生的橫向載荷。在平衡活塞內部設計通氣道,配合壓縮管左端電磁閥充入高壓空氣,控制活塞閥的開關狀態。
(3)壓縮管內徑為125 mm,長為7.91 m,軸線離地面6 m 且水平放置。為消除氣炮在實驗過程中產生的后坐力,壓縮管兩端的平衡和阻尼活塞均為可移動活塞,并在可移動活塞表面周向布置O 形圈密封,保證壓縮管只受摩擦力作用,在重活塞運動過程中保持穩定。阻尼活塞由液壓油缸驅動,由安裝在油缸頭部的聚氨酯板和復位彈簧組成,能有效緩沖和吸收重活塞在壓縮終點附近的剩余動能,防止重活塞剛性撞擊造成設備損壞。圖1 中液壓缸直接作用于端部阻尼塊,防止其軸向運動。類似地,為保證實驗穩定性和重復性,充氣腔和集氣腔與壓縮管之間為滑動連接,該結構可保證即使重活塞運動時壓縮管產生位移和振動,集氣腔和連接的發射管仍可保持不動,這是本文設備不同于其他氣炮之處。
(4)集氣腔和充氣腔結構類似。對集氣腔而言,為減小余隙容積,需保證高溫高壓氣體進入集氣腔時,重活塞運動到壓縮管右端,再次形成類似的活塞閥。集氣腔體積對壓縮管終態參數有重要影響。若體積太大,導致驅動氣體壓力和溫度不高,會降低破膜壓力和模型速度。綜合結構設計和驅動效率考慮,本文中設計集氣腔內徑為200 mm,長為196 mm,其容積為3.85 L。
(5)發射管和集氣腔連接處設置前夾膜段,安裝預置銑槽的金屬膜片(鋼膜或鋁膜)。由理論估算得知,當發射管和壓縮管截面積比為1∶9,可獲得壓力驅動增益大于80%,因此確定發射管內徑為40 mm。考慮到水面受重力作用無法傾斜,需設計可變角度的發射管以滿足斜入水模型要求。圖2 所示為立式氣炮側視圖(L 形布置)。從圖2 看出,發射管可變角度范圍為45°~90°。發射管長度最大為6 m,可根據角度需要調節長度。發射管出口安裝內置導向管和測速孔的彈托捕捉器,采用撞擊方式分離彈托和模型。彈托捕捉器還具有側向泄氣功能,以減弱模型入水前尾流對氣水界面的影響。為保護彈托捕捉器,同時降低彈托質量,本文中彈托材質為聚四氟乙烯。導向管出口設置后夾膜段,安裝雙向拉伸聚丙烯薄膜(biaxially oriented polypropylene,BOPP),隔離外部空氣環境,方便調節發射管內初始壓力。
(6)圖2 中實驗艙可在導軌上前后移動,并通過支架調節俯仰,同時和發射管滑動連接,滿足發射角度變化要求。實驗艙內徑為0.5 m,長為1.2 m,在兩側各布置2 個觀察窗,用于光學測量。為防止模型直接撞擊艙底,應在實驗艙底部和側邊布置緩沖材料(如硬橡皮或金屬板)進行防護。

圖2 立式氣炮可變發射角側視圖Fig. 2 Profiles of variable incident angle of the vertical gas gun
立式氣炮實驗過程簡述如下:實驗前,將氣罐充入預定壓力的高壓空氣;將壓縮管、發射管抽真空,再向壓縮管中充入指定氣體至指定壓力;向實驗艙注水。實驗開始時,從激發孔充入高壓空氣,驅動重活塞向右移動。當重活塞滑過充氣腔進氣道,氣罐中高壓氣體從環形集氣腔迅速充入重活塞和平衡活塞之間,并推動重活塞加速右移,使壓縮管中氣體充入集氣腔。理想情況下,隨著集氣腔壓力、溫度升高,重活塞速度迅速下降,當重活塞和聚氨酯塊距離接近為零,重活塞速度正好降為零,將壓縮管中氣體完全充入集氣腔中。當集氣腔氣體壓力達到破膜壓力,膜片破裂,推動彈托和模型加速運動。在發射管出口,通過捕捉器將彈托碰撞分離,高速模型在導向管內運動并穿透末端BOPP 膜片,進入空氣中飛行至實驗艙水面,斜侵入水中減速直至靜止。
2 臥式一級氣炮水箱實驗系統
為滿足大質量(幾到幾百千克)、大尺寸(最大外徑為200 mm,長度不限)和低速(幾到200 m/s)模型入水和水中航行實驗需求,本文臥式一級氣炮和水箱實驗系統如圖3 所示,其主要組成部分有:高壓氣室、壓縮管、泄氣段和實驗艙等。和立式氣炮類似,臥式一級氣炮采用高壓氣體驅動彈托和模型,在壓縮管中加速運動,最終以較高速度進入實驗艙。其中,高壓氣罐內徑為320 mm,長為3 m;壓縮管內徑為200 mm,長為10 m;實驗艙內徑為1 m,長為5 m。高壓氣罐通過活塞閥連接壓縮管外部充氣腔,再由平衡活塞內高壓氣孔控制激發狀態。壓縮管末端和實驗艙之間安裝泄氣段、可重復使用彈托捕捉器、氣動閘板閥(內徑為150 mm)和夾膜段。其中,泄氣段將彈托下游氣體側向排出,以免進入水箱并影響模型入水流場。采用可重復使用的彈托捕捉器分離模型和彈托。閘板閥和實驗艙之間夾有BOPP 膜片,當模型進入實驗艙且膜片破裂后,閘板閥及時關閉,防止實驗艙內的水流出進入泄氣段和壓縮管。實驗艙兩側各安裝4 個直徑為300 mm 的觀察窗,用于光學拍攝測量,頂部同樣安裝直徑為300 mm 的觀察窗,針對片光Mie 散射、粒子成像測速(particle image velocity,PIV)等測量方法提供進光或標定路徑。實驗艙末端安裝防撞塊,并將實驗艙整體放置于可沿軸向移動導軌上,以削弱高速模型對實驗艙的撞擊作用。

圖3 臥式一級氣炮總體結構示意圖Fig. 3 Schematic diagram of the global structure of the horizontal one-stage gas gun
3 實驗測量裝置
3.1 重活塞速度測量
為認識壓縮管終點附近破膜前后重活塞運動狀態,采用基于光反射的通斷法測量壓縮管中重活塞速度。圖4 所示為立式氣炮壓縮管單個測點測量活塞速度的光路示意圖。從圖4 看出,在壓縮管壁設置測速孔安裝光纖座,通過輸入和輸出光纖分別連接光纖座和短弧氙燈光源(非激光光源)、光纖座和光電二極管。在重活塞表面間距376 mm的凹槽處粘貼2 道反光鋁箔。當重活塞帶動反光鋁箔依次運動至測速孔,對應通道光電二極管將接收2 次脈沖光信號,根據反光鋁箔間距和光信號時間差即可得到測點處重活塞速度。考慮重活塞長度和運動限制,重活塞行程約為6 m。在壓縮管上設置11 個測速孔,測速區長度為6.1 m。
安裝重活塞前,需仔細檢查反光鋁箔是否干凈平整,以保證較高的光反射效率。輸入光纖將發射光導向重活塞凹槽的反光鋁箔,再用同一站點的輸出光纖導出反射光。要說明的是,為方便顯示,圖4 中輸入和輸出光纖的水平位置存在差別,實際上兩者水平位置相同。另外,原理上可采用加速度傳感器測量重活塞加速度,但受過載和振動影響,由加速度積分得到的速度比光反射法直接測得的速度精度低很多。

圖4 光反射測速法示意圖Fig. 4 Schematic diagram of velocity measurement with light reflection
3.2 立式氣炮陰影測量
圖5 所示為立式氣炮的帶觀察窗實驗艙測量系統示意圖。由于設備限制,本文中陰影測量實驗分為2 組:一組采用脈沖火花光源(KDH-1 型),配合單反相機(Nikon D60)的B 門常開模式拍攝;另一組采用連續8W-532nm 激光器(SUMZG-5000B),配合高速攝影相機(Photron Fastcam SA-Z)拍攝。除激光器采用的擴束器外,2 組陰影測量裝置相同。在發射管末端夾膜段后安裝模型測速段,其原理基于光反射法,和圖4 中的重活塞測速裝置相同。考慮到模型體積較小,在模型表面鍍鉻,提高光反射效率,根據測速段上2 個測速孔(間距50 mm)采集的反射光信號,得到高速模型進入空氣前的平均速度。2 組實驗均采用測速信號觸發延時器DG535 輸出TTL 電平,再由TTL 電平觸發火花光源或高速攝影相機。

圖5 立式氣炮陰影測量系統光路示意圖Fig. 5 Schematic diagram of optical path of shadow measurement of the vertical gas gun
3.3 臥式氣炮陰影測量
圖6 給出臥式氣炮陰影測量光路示意圖。和立式氣炮陰影測量相比,臥式氣炮觀察窗直徑更大(250 mm),采用大直徑(300 mm)凹球反射鏡代替凸透鏡產生平行光,并采用Z 形布置。同時由于場地限制,采用反射鏡來擴展光路。類似的,在泄氣段上安裝基于光通斷法的模型測速裝置,在模型入水前將測速光信號通過延時器DG535 轉化為TTL 電平控制高速攝影相機拍攝。同時,采用TTL 電平觸發光電二極管觸發模型隨體測量的光電管和繼電器,啟動模型隨體加速度測量數據采集系統,實現模型在線測量和水箱側向流場顯示的時間同步控制。

圖6 臥式氣炮實驗艙和陰影測量系統光路示意圖Fig. 6 Schematic diagram of optical paths of shadow measurement of the horizontal gas gun
4 結果分析
4.1 重活塞速度計算
重活塞速度是氣炮性能指標的重要參數,和集氣腔氣體終態參數、模型底壓和膜片破裂過程等密切相關。下面首先給出理想情況下重活塞速度理論計算。
針對自由活塞運動,忽略壓縮過程中壁面熱傳導、重活塞和壁面摩擦以及由高壓驅動氣體速度和重活塞運動產生的波系,近似認為該過程等熵,并假設被壓縮氣體滿足量熱完全氣體狀態。則被壓縮氣體受重活塞等熵壓縮后的內能增加為:

式中:c為被壓縮氣體定容比熱,下標m 表示壓縮過程中間狀態,i 表示初始狀態,為被壓縮氣體溫度,為壓力,為體積,γ 為比熱比,為理想氣體常數。
經驗表明,當氣室和壓縮管容積比為2~2.5 時,可采用等底壓假設粗略估計重活塞的質量、運動速度和初始壓力之間的關系。因此,假設高壓氣室的壓力在壓縮過程中近似保持不變,則高壓驅動氣體做功為:

要說明的是,式(7) 僅適用于重活塞壓縮過程,即和單調增大,單調減小。當膜片破裂(減小)或膜片未破裂而重活塞反彈(減小),式(7)不再適用。
4.2 重活塞速度測量
4.2.1 破膜工況重活塞速度測量
針對膜片破裂工況,圖7 所示為重活塞速度沿壓縮管軸線分布。圖7 表明:壓縮初期,重活塞速度迅速上升,隨后重活塞速度緩慢上升。膜片破裂后,重活塞速度迅速上升。當重活塞封閉集氣腔,接近壓縮終程時,其速度迅速下降。圖7 中還給出根據式(7)估算得到的重活塞速度沿壓縮管軸線的變化曲線-,方程各參數取值為= 0.125 m,= 40 kg,= 0.1 MPa,= 0.8 MPa,= 6 m,γ = 1.4。對比計算值和測量值,結果表明:未破膜前,重活塞速度計算值和測量值變化規律相似,只是數值略有差別,這可能是由于重活塞周向密封和壓縮管壁之間存在較大摩擦。但破膜后兩者有較大差別,表現為重活塞速度在壓縮末期急劇上升,這是由于理論估算無法考慮膜片破裂后的情況。

圖7 破膜工況重活塞沿壓縮管軸線速度分布Fig. 7 Piston velocity distribution along the axis of the compression tube under diaphragm burst condition
圖8 所示為集氣腔內氣體壓力()隨時間變化曲線。圖8 表明:壓縮初期,緩慢上升;壓縮后期,快速上升;膜片破裂過程中,波動較劇烈,并出現一定的壓力平臺;破膜后,急劇下降。集氣腔壓力在膜片破裂過程中和破膜后變化較大,這是重活塞速度測量值和計算值差別較大的原因之一。

圖8 破膜工況集氣腔壓力時間曲線Fig. 8 Pressure history in the gas collection chamber under diaphragm burst condition
4.2.2 未破膜工況重活塞速度測量
圖9 所示未破膜工況的活塞速度分布,其中,圖9(a)為重活塞速度沿壓縮管軸線的分布,圖9(b)為重活塞速度隨時間的變化歷程。圖9(a)表明:未破膜工況重活塞壓縮過程和破膜工況類似,在管長5 m 處(靠近壓縮終點),重活塞速度急劇下降并隨后出現后退,且摩擦力導致重活塞后退速度較低。圖9(b)表明:重活塞由前向運動變為后向運動的時間很短(約50 ms)。這表明壓縮終點附近,重活塞加速度非常高(約2 740 m/s)。為防止重活塞后退,選擇合適破膜壓力的膜片非常重要,理想情況下,當重活塞運動到壓縮終點并停留在右端阻尼活塞,此時膜片破裂同步完成。經過反復實驗,本文膜片采用預置銑槽的退火鋁膜,膜片厚度為2 mm,槽深為0.2~0.6 mm,對應破膜壓力為15~ 25 MPa。

圖9 未破膜工況重活塞速度沿壓縮管軸線分布和隨時間變化Fig. 9 Piston velocity distribution along the axis of compression tube and history with time marching under non-burst condition
4.3 立式氣炮高速模型斜入水陰影測量
圖10 所示高速模型斜侵入水前后流場陰影照片,對應實驗工況為:鋼膜厚度為1.5 mm,預置銑槽深度為1.2 mm,高壓驅動氣體壓力為0.8 MPa,彈托質量為49 g,錐柱狀尖頭模型柱體直徑10 mm,柱體長度10 mm,頭部錐角60°,質量為9 g,入水前速度約為1 800 m/s。圖10 清楚地顯示了模型入水前的空氣頭激波和羽流激波、入水后的水中激波系以及斜侵徹引起的單側水界面破碎和空化區(即圖中黑色區域)。要說明的是:由于加工誤差造成兩塊觀察窗不平行,導致流場中平行光線產生折射,在氣水界面產生了錯位交叉的分界面。

圖10 模型入水前后陰影照片Fig. 10 Shadow graphs captured before and after the oblique water-entry of the model
圖10(a)顯示,入水前,模型在空氣中飛行,頭部出現脫體激波,尾部出現漩渦。氣流經過頭部激波后沿側面流向下游,然后穿過側面和底面交線產生的稀疏波,繼續膨脹變為模型羽流。模型橫截面積小,近底部羽流亞聲速區域尺度小,因此,下游近尾流區很快又向外膨脹為超聲速區域。當超聲速來流和模型羽流相互作用,又形成多道羽流激波。圖10(b)顯示,模型頭激波和羽流激波先后在模型入水后的水面上反射,鑒于水密度高、慣性大,未引起氣水界面強烈震蕩。當模型侵入水中,產生向外傳播的多道半球形沖擊波。與空氣相比,模型受水阻力顯著增大,速度明顯降低。由于水聲速大,沖擊波傳播速度快,水中模型尾流出現形狀不規則的卷入空氣泡(黑色區域)。模型斜侵入水,在氣水界面上的液體飛濺和空泡區也是非對稱的,偏向于模型入射軌跡和水面相交平面法線另一側。隨時間推移,模型底部高速羽流和斜入水后的氣水界面發生相互作用,在非水平氣水界面產生多道非規則、向空氣傳播的反射激波。此時氣水界面不水平,存在飛濺兩相水霧,無法觀察反射激波來源。圖10(c)顯示,當模型入水后,其羽流和氣水界面繼續相互作用,斜向上噴射的破碎射流進一步擴大。氣水界面下空泡區也進一步擴展。水阻力導致模型速度有所衰減,模型入水后的氣水界面強擾動會很快干擾模型水下運動及尾流,間接影響模型水下彈道。
為研究尺度效應,利用立式氣炮發射質量較大、速度較低的鋁制模型,圖11 給出錐柱狀尖頭模型和截錐狀平頭模型斜侵入水流場高速陰影照片,模型參數見表1。3 次實驗對應工況均為:鋼膜厚度為1.0 mm,槽深為0.7 mm,驅動氣體壓力為1.1 MPa。高速攝影相機拍攝速率為6 400 s,曝光時間為2 μs,圖片像素為480×480。

表1 不同工況模型參數Table 1 Parameters of different models
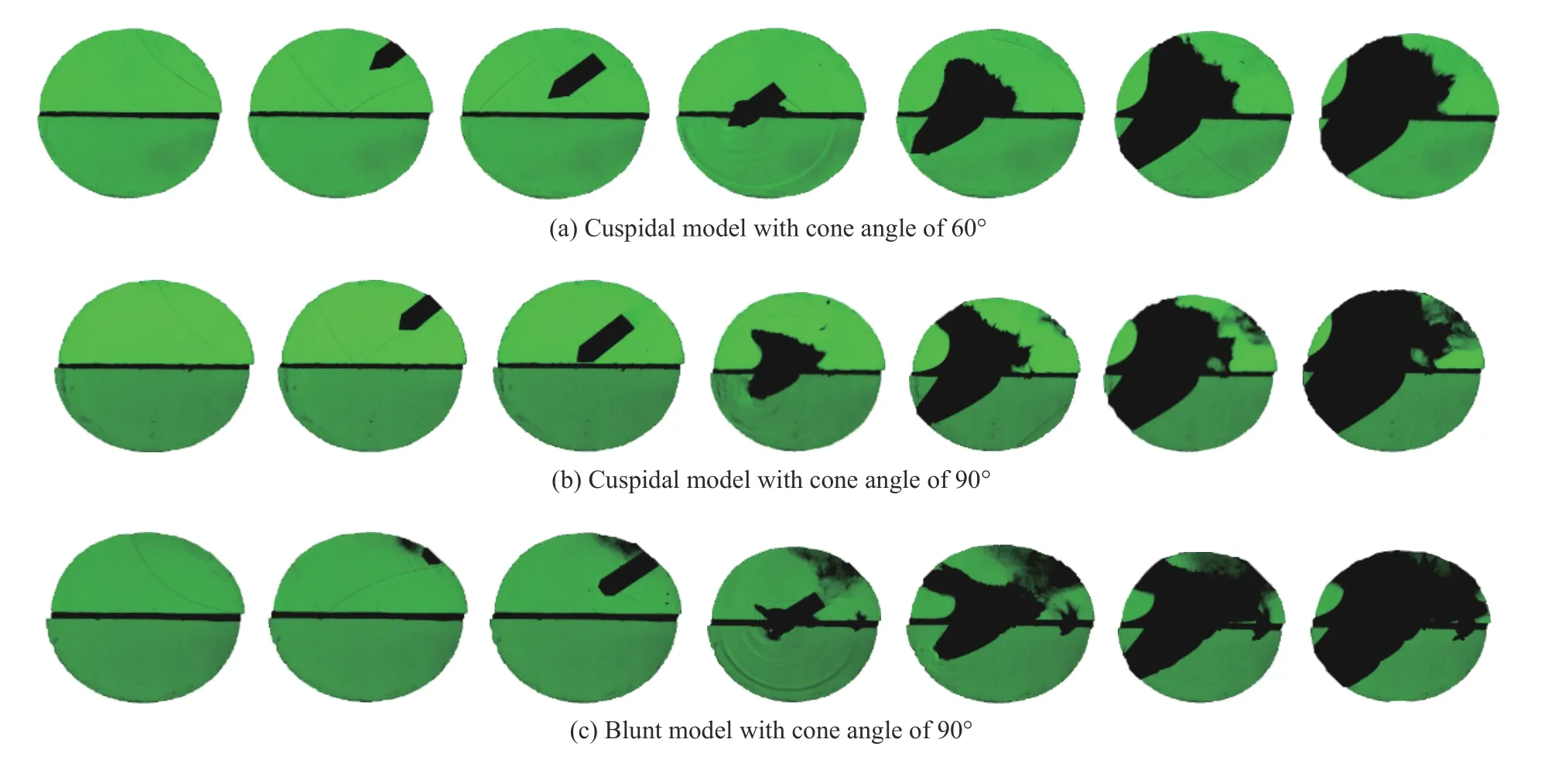
圖11 不同頭形模型斜入水流場陰影圖像Fig. 11 Shadow graphs with projectiles of different head models inclined into the water
圖11 表明:模型入水前,羽流氣流產生的激波已超越模型頭部,在氣水界面反射。模型侵徹入水產生半球形激波,表明水的若壓縮性質。模型在入水后承受較大沖擊載荷,相當于高速碰撞。水聲速大于空氣,水中沖擊波傳播速度也快于空氣激波。圖中黑色區域對應密度大或梯度較大變化,即水中模型尾流空泡、模型入水產生的液面飛濺和破碎等區域。可以看到,空泡區和霧化區均呈現不規則形狀且無明顯界面,對模型軸線呈不對稱分布,主要位于模型入射軌跡和氣水界面交線夾角較大(鈍角)一側。氣水界面處可觀察到模型尾跡氣體膨脹在空氣中產生的反射激波,其水中投射激波非常弱,無法在陰影照片中清楚辨別。參照觀察窗直徑,圖11 中模型(含氣泡)在水中位移分別為51.81、53.64 和51.40 mm,平均速度分別為331.6、343.3 和329.0 m/s,對應入水前模型速度分別為350.5、361.9 和356.4 m/s,速度衰減5.4%、5.1%和7.7%,這表明較大橫截面模型入水后速度衰減也較大。圖11還表明:模型頭部形狀對入水和水下彈道有重要影響。水密度較大,導致卷入羽流氣泡膨脹相對緩慢,限于觀察窗尺寸,不能得到全部模型水下彈道。
4.4 臥式氣炮大質量模型水平入水陰影測量
利用臥式氣炮發射較大尺度的截錐狀平頭模型,總長450 mm,柱體直徑為70 mm,柱體長為400 mm,頭部端面直徑為46.7 mm,錐角約26°。圖12(a)給出由高速攝影照片提取的空泡輪廓外形,其中,實驗水溫15 ℃,水中模型速度為42.7 m/s。圖12(a)表明:頭部端面相當于空化盤,卷入空氣和水空化產生的封閉空泡完全包裹模型表面。受重力作用,模型航行速度快,空泡受上浮影響不大,在視窗可見范圍未出現明顯上轉。除空泡尾流外,空泡外輪廓清晰完整,無明顯的大尺度界面失穩。采用Fluent 計算軟件模擬該工況模型入水流場,圖12(b)給出計算和實驗得到氣泡輪廓圖線對比。圖12(b)表明:兩者基本符合,但在空泡尾部出現明顯差異,原因可能是:模型尾流是高度非定常的兩相湍流場,包含氣水界面、水空化和湍流流動,受回流影響嚴重,容易出現翻卷和破碎(界面失穩),數值計算難以囊括這些現象的物理模型。

圖12 氣泡輪廓實驗和計算結果對比Fig. 12 Comparison of bubble contours between experimental and computational results
5 結 論
(1)和水洞相比,氣炮可發射較大速度和質量范圍模型,立式可變發射角和臥式大尺度氣炮可滿足模型高速入水和水中航行的實驗需求,近似真實地再現入水實驗現象。結合側向泄氣和可重復使用彈托捕捉器,有效地消除了模型入水前氣炮尾流對氣水界面的擾動,適合開展不同尺度模型入水現象模擬。特別是流場顯示和隨體測量一體化研究,為流固耦合流場研究提供了新途徑。
(2)立式氣炮初步實驗圖像可清楚地觀察到由高速模型產生的空中激波在氣水界面反射,模型斜入水導致氣水界面破碎,在水中產生沖擊波等現象。臥式氣炮初步實驗圖像給出了覆蓋模型氣泡完整圖像,可觀察氣泡自尾部向上游傳遞的失穩現象。
(3)模型受到的沖擊載荷和頭部幾何結構相關性較大。截錐和鈍頭受沖擊載荷大,所產生的覆蓋模型氣泡尺度也較大,并和模型尺度非線性相關。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52