Petri網在架空電纜無人機巡檢方面的研究
2022-02-10 08:35:48趙厚群張坤乾繆玉婷
綏化學院學報 2022年12期
孫 霞 張 潔 趙厚群 張坤乾 繆玉婷
(安徽理工大學電氣與信息工程學院 安徽淮南 232001)
隨著航空工業領域的快速發展,無人機作為巡檢裝備之一。因其具有體積小、成本低、使用方便、技術簡單成熟等特點[1-2],逐漸在電力設備巡檢中得到認可。目前已使用于電力系統維護的方方面面,例如,將無人機用于輸電線路的巡檢[3];針對光伏電站體積較大,運維壓力等問題,提出一種基于光伏電站的無人機智能巡檢完整技術路線[4]。利用無人機巡檢,可以及時發現缺陷,彌補傳統巡檢的不足,提高對電氣設備的巡檢質量,減輕運維人員的工作壓力。Petri網作為一種優秀的系統建模和分析工具,可應用于多種場景,在處理實際問題時,可用Petri網的相應性質和行為輪廓對系統進行建模和優化。物聯網技術已在各個領域中得到廣泛應用,本文將物聯網技術與無人機巡檢相結合,提出架空電纜無人機巡檢的優化模型。
一、基本概念
(一)有向網。若滿足以下3個條件的三元組N=(S,T;F)就稱為有向網,簡稱網。
①S∪T≠?ΛS∩T=?。
②F?S×T∪T×S。
③dom(F)∪ cod(F)=S∪ T。
dom(F)={x|?y(x,y)∈ F};
cod(F)={y|?x:(x,y)∈ F}。S和T是兩個不相交的集合。其中S元素稱為庫所(place),T元素稱為變遷(transition),F是網N的流關系(flow ralation),“×”表示笛卡爾積。Petri網規則:如果某一個變遷的所有前驅庫所都有托肯,則這個變遷滿足發射條件。變遷發射時,從它所有的前驅庫所里分別取出1個托肯,同時往它所有的后繼庫所里面分別放置1個托肯,以此類推。
(二)Petri網系統。Σ=(S,T;F,K,W,M0)是Petri網系統,其中K是N上的容量函數(S元素的容量函數),W是N上的權函數(資源消耗或產生的量),應滿足
①N=(S,T;F)為Σ的基網,為有向網。
②M0是容量函數K允許的標識(初始標識)。
(1)若變遷t∈T,則t在M有發生權的條件是?s=.t:M(s)≥ 1,則稱t在M使能,記作M[t>1;
(2)若t在M有發生權,則t可以發生并將M改為新的表示M',記作M[t>M',則有
(三)行為輪廓。(N,M0)是一個網,初始標識M0。將所有關系的集合稱為網系統的行為輪廓[5],記作BP={→,→-1,+,||}對任給的變遷(t1,t2)∈(TXT)滿足下列關系:
(1)若t1>t2且t2≯t1,則稱嚴格序關系,記作t1>→t2;
(2)若t1≯t2且t2>t1,則稱嚴格逆序關系,記作t1→-1t2;
(3)若t1≯t2且t2≯t1,則稱排他關系,記作t1+t2;
(4)若t1>t2且t2>t1,則稱交叉序關系,記作t1||t2。
(四)結構性質。網系統Σ=(S,T;F,W,M0),其結構性質是由網系統的靜態結構決定的,與初始標識無關,網系統的靜態結構用(S,T;F,W)表示。
(1)關聯矩陣:矩陣A=(Aij)為網系統Σ=(S,T;F,W,M0)的關聯矩陣,A以S為行序標集,以T為列序標集,其i行j列的矩陣元素aij=W'(tj,si)-W'(si,tj)。其中W'由W擴展而來,若(x,y)∈F,則W'(x,y)=W(x,y);若(x,y)?F,則W'(x,y)=0。
(2)狀態方程M=M0+A × τT,其中,τ為任一T_向量,M0和M分別是標識的S_向量。
①若T_向量τ滿足M0=M0+A×τT,則稱τ為Σ的T_不變量,若τ為Σ的T_不變量,則A× τT= θST,其中,θs是分量全為0的S_向量。
②若S_向量σ滿足σ ×A=θT,則σ稱為Σ的S_不變量,其中θT是分量全為0的T_向量。
二、優化前架空電纜無人機巡檢Petri模型
無人機巡檢是目前最受關注的問題之一,本文是借助無人機通過搭載的視頻設備,對架空電纜進行監測、數據采集。運維人員可以借助無人機進行人工無法實現的、危險的以及重復的架空電纜的運維工作。下面利用Petri網對架空電纜無人機巡檢進行建模分析。
圖1為架空電纜無人機巡檢流程的Petri網模型圖,圖中P0庫所中的token代表巡檢無人機,運維人員對無人機進行檢查、試飛后,無人機搭載機載設備,按照規劃的飛行路線對架空電纜進行巡檢。T0、T1、T2發生后,無人機對周圍環境進行采集,T3和T5是排他關系,若拍攝畫面顯示無異常,則T3、T4發生,繼續或結束巡檢。若拍攝畫面有異常,T5發生,T6和T9是并發關系,可同時發生。例如發現鳥窩,T6-T8發生;發現有樹枝遮擋,T9-T11發生,運維人員接收到畫面立刻前去清理,清理完畢后,T4發生,繼續或結束巡檢。架空電纜無人機巡檢流程的Petri網模型各變遷符號及意義文字說明見表1。

圖1 優化前架空電纜無人機巡檢Petri網模型
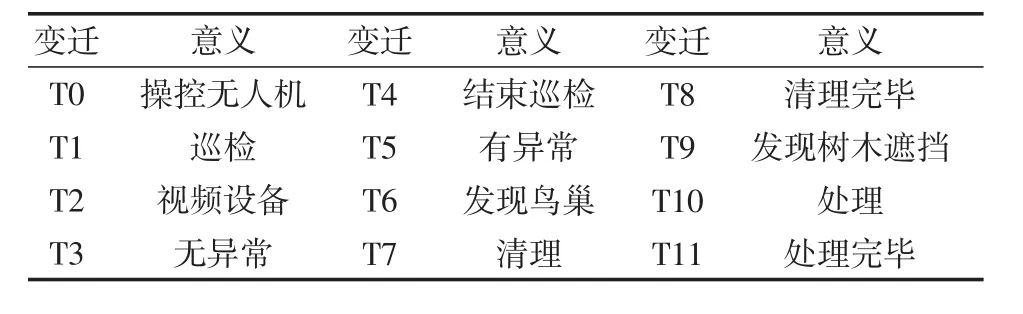
表1 優化前架空電纜無人機巡檢流程的Petri網模型各變遷符號及意義文字說明
三、優化后架空電纜無人機巡檢Petri模型
優化前的無人機巡檢方式單一,且只能依靠設備所拍攝的畫面來監測架空電纜是否出現故障等問題。相比于優化前的架空電纜無人機巡檢,優化后的無人機巡檢增加了紅外感應設備,以實現對架空電纜的溫度監測。不同于可見光的人感應,紅外因其具有較強的輻射能力,可以監測到在可見光波段無法監測的特定目標[6]。該設備是由紅外感應模塊、微處理器模塊、電源模塊和LoRa通信模塊組成。LoRa傳輸技術滿足低功耗、遠距離傳輸,信號靈敏、響應速度高且數據傳輸的抗干擾能力強[7-8]。整體流程為:紅外感應模塊對架空電纜環境數據進行采集,通過LoRa技術將數據傳輸至監測中心。由此對架空電纜無人機巡檢進行優化,增添相關活動變遷和行為輪廓,構建成新的架空電纜無人機巡檢Petri網模型。圖2則是優化后的架空電纜無人機巡檢的Petri網模型。
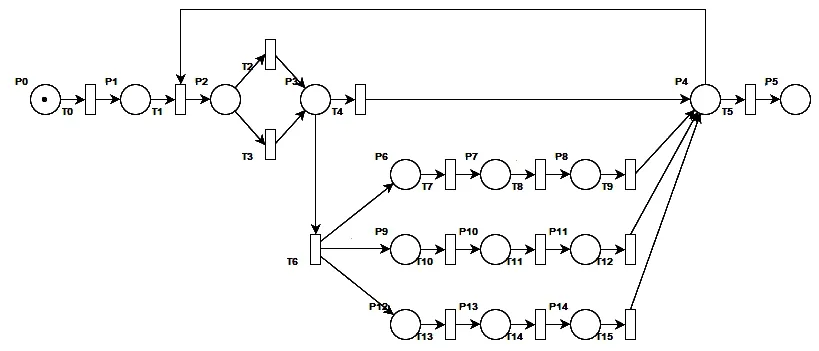
圖2 優化后架空電纜無人機巡檢petri網模型
圖中庫所P0的token代表無人機。運維人員操控無人機起飛后開始巡檢,圖中T2、T3是并發關系,二者同時發生,視頻設備拍攝有無異常畫面,紅外感應設備采集數據,通過閾值對比,監測電纜是否存在異常高溫可能。T4和T6是一對排他關系,無異常,T4發生,結束巡檢。若存在異常,T6發生,例如若紅外感應設備所監測電纜環境數值超過設定閾值,T13發生,數據通過LoRa的射頻芯片進行傳輸處理,將數據上傳至監測中心,運維人員及時鎖定發生異常方位,并前往處理,T14發生,檢修完畢(T15)后,繼續巡檢或結束巡檢(T5)。優化后架空電纜無人機巡檢流程的Petri網模型各變遷符號及意義文字說明見表2。
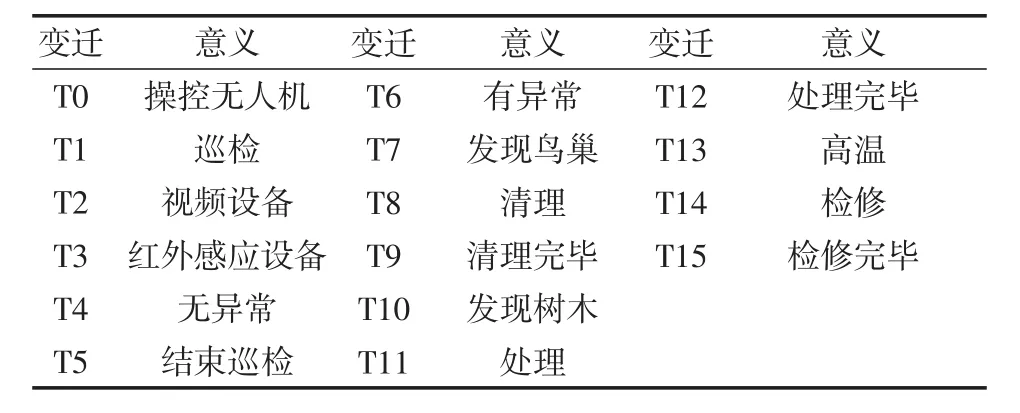
表2 優化后架空電纜無人機巡檢流程Petri網模型各變遷符號及意義文字說明
四、優化后架空電纜無人機巡檢Petri網性能分析與驗證
(一)性質分析。Petri網的一個標識可以表示成一個m維非負整數向量。Petri網的結構也可以用一個矩陣來表示,即引入線性代數的方法對Petri網的性質進行分析[9]。通過分析其靜態性質,可驗證出該模型的結構穩定性。
架空電纜無人機巡檢的Petri網的靜態性質是由關聯矩陣A、輸入矩陣B、輸出矩陣C表示,三者的關系式為A=B-C。矩陣中S為行標集,T為列標集。
1.輸入矩陣。輸入矩陣的矩陣元素用bij表示,當變遷發生時,庫所中產生token,初始庫所中只消耗token。
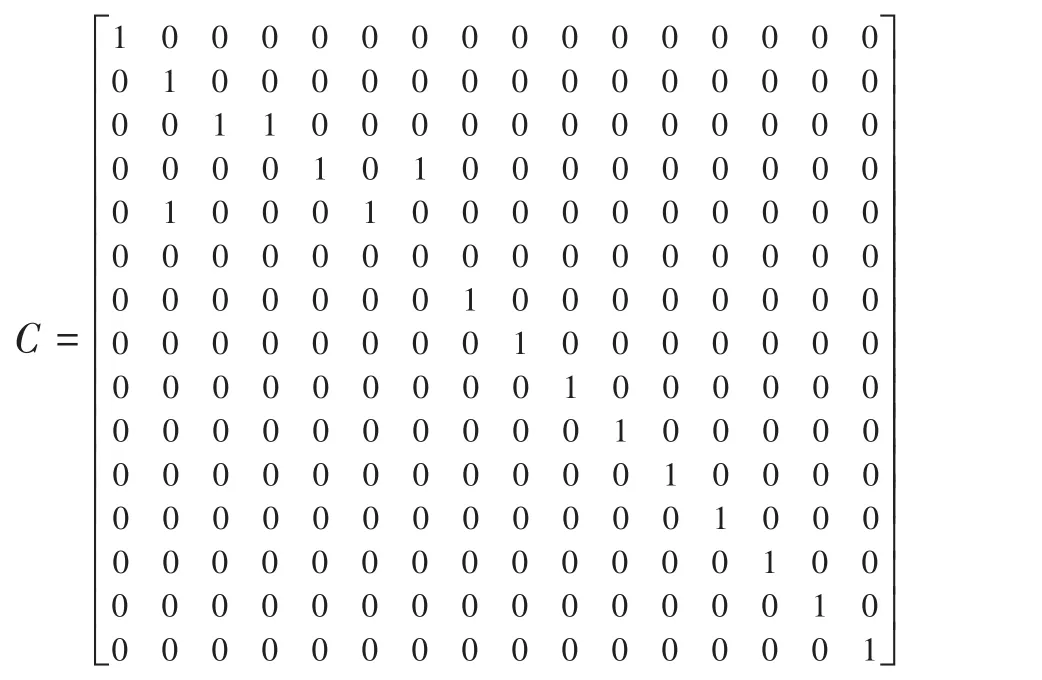
2.輸出矩陣。輸出矩陣的矩陣元素用cij表示,當變遷發生時,會消耗token,架空電纜無人機巡檢的Petri網的輸出矩陣C如下所示。
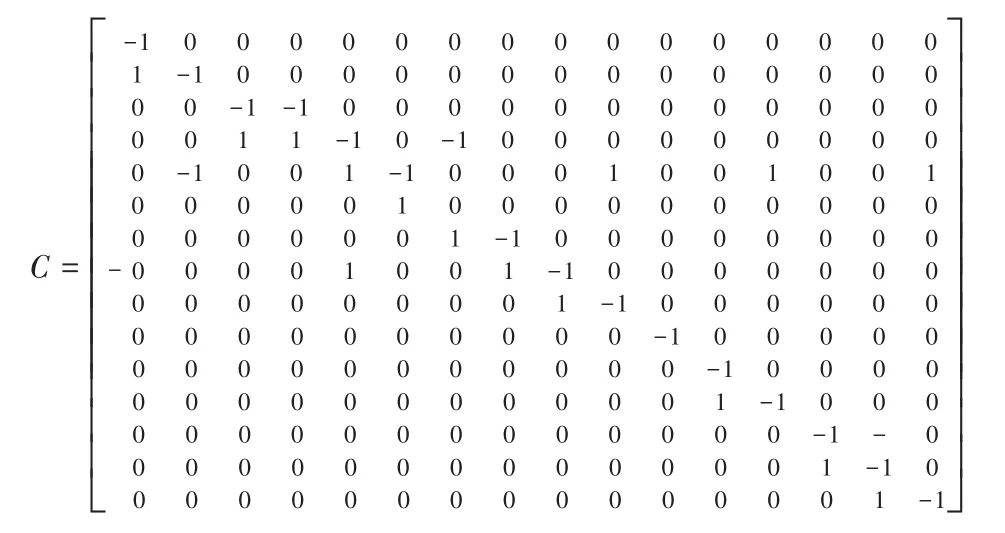
3.關聯矩陣。是對網系統的結構描述,與初始標識無關。關聯矩陣的矩陣元素用aij表示,aij是變遷tj發生一次對si所含token數量的改變,發生變遷時,會產生或是消耗token,產生用正數,消耗用負數表示。行對應著庫所與相應變遷集間的關系,列對應著變遷與相應庫所集間的關系。架空電纜無人機巡檢的Petri網的關聯矩陣A如下所示。
根據架空電纜無人機巡檢的Petri網模型的關聯矩陣,由公式ATX=θT與AY=θS的可得出通解X和Y,即S_不變量和T_不變量,由后者可解出矩陣的通解YT為:
YT=(0 0-1 1 0 0 0 0 0 0 0 0 0 0 0 0)。
由矩陣的通解可知,分量1代表token從庫所流至變遷,分量-1代表token從變遷流至庫所。變遷發生不會改變庫所中的token數,故架空電纜無人機巡檢的Petri網模型的流通路徑是固定的。因此,該檢測方式的Petri網結構是靜態穩定的、可達的。
(二)仿真實驗驗證。為檢驗優化后的架空電纜無人機巡檢Petri網模型的正確性與可達性,在Petri網分析軟件PIPE中繪制模型圖,利用State Space Analysis函數,對優化后的模型進行驗證。運行結果圖如圖3所示。結果表明,優化后的模型是可達的。

圖3 PIPE模型仿真檢驗圖
五、結語
通過對傳統架空電纜無人機巡檢Petri網模型的分析,在此基礎上,增加紅外感應設備,應用物聯網技術對電纜環境數據進行無線傳輸,建模優化架空電纜無人機巡檢方式,對其Petri網的靜態結構分析可達性與準確性,并在PIPE軟件中得到驗證。優化后的架空電纜無人機巡檢方式,可減輕運維人員的工作強度,能夠使得運維人員能夠快速地發現故障點并及時檢修或處理。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
