基于北斗三號遠程監測系統的公路巖質邊坡開挖變形分析
2022-02-03 05:29:32彭松劉建坤張云龍常丹孫兆輝
科學技術與工程 2022年33期
彭松, 劉建坤*, 張云龍, 常丹, 孫兆輝
(1.中山大學土木工程學院, 廣州 510275; 2. 中國鐵路設計集團有限公司, 天津 300308)
全球衛星導航系統(global navigation satellite system,GNSS)作為新型的國家基礎設施[1],具有保障國家安全和促進經濟發展的重要作用。北斗三號衛星導航系統(BeiDou-3 navigation satellite system,BDS-3)組網完成,領先于歐盟的伽利略衛星導航系統(Galileo satellite navigation system,GALILEO),成為繼美國的全球定位系統(global positioning system,GPS)和俄羅斯格洛納斯衛星導航系統(global navigation satellite system,GLONASS)之后,能夠提供高精度授時、定位和導航服務的全球衛星導航系統。北斗三號星座共30顆衛星,由3顆地球靜止軌道衛星(geostationary satellite,GEO)、3顆傾斜地球同步軌道衛星(inclined geosynchronous orbit,IGSO)和24顆中圓地球軌道衛星(medium orbit earth satellite,MEO)組成[2-4]。
隨著工程建設的發展,監測環境漸趨復雜多變,精度要求日益提高,邊坡變形監測技術逐漸趨向自動化、遠程化和高精度[5]。司夢元等[6]等針對公路高邊坡監測難等問題,采用三維激光掃描技術對邊坡進行自動化監測,獲取邊坡整體和局部變形信息。孫嘉旭等[7]介紹了無人機攝影測量的原理,總結了無人機攝影測量在邊坡監測中的最新研究進展,展望了相關領域今后的研究方向。姚佳明等[8]利用合成孔徑雷達干涉測量(synthetic aperture radar interferometry,InSAR)技術對天水市滑坡進行了識別和調查,并利用SBAS-InSAR對變形數據進行了計算分析,發現了103處活動性災害,包括滑坡和地面沉降,并給出了滑坡變形趨勢的預測。三維激光掃描技術測量范圍為幾米到幾十米,難以勝任大范圍地質災害調查和滑坡監測。InSAR技術對于特定點位持續監測會增加額外工作量,且進行24 h不間斷變形監測,數據量巨大,不適用于工程的小范圍固定點位的變形監測[9-10]。無人機攝影測量精度受無人機與目標物的距離影響較嚴重,觀測大壩、大面積邊坡等需要移動多次拍攝,費時費力[11-12],且無法持續觀測。
GNSS依靠系統衛星,能夠實現全天候持續監測,利用相對定位算法能夠實現毫米至亞毫米的監測定位精度[13-14]。通過布設監測點可以實現特定位置持續不間斷監測,利用監測點搭建監測網絡能夠實現大壩、邊坡、高鐵等大范圍、長距離監測,監測范圍靈活。Yang等[15]提出了一種新的GNSS監測技術GNSS-R(GNSS reflectometry),該技術通過接收變形體反射的GNSS信號來遠程估計變形,現場測試表明,該技術可以觀測到亞厘米級的變形。邵沛涵等[16]利用初步設計的北斗三號監測系統,對公路高邊坡進行實時監測,通過對比BDS和GPS的解算結果發現,同時使用BDS-2和BDS-3的觀測精度和質量與GPS相當,且部分基線優于GPS。姚仰平等[17]基于北斗衛星定位系統設計搭建了機場高填方變形監測系統。通過載波相位差分技術實現高精度定位,日定位時長設定60 min的情況下北斗靜態相對定位垂直方向精度優于3.6 mm,能夠滿足機場高填方變形監測的需求。張雪林等[18]利用物聯網技術設計了一種滑坡監測數據自動采集系統,以傳感器節點采集滑坡體位移數據,利用北斗短報文模塊進行數據傳輸,彌補了野外數據采集的不足,但并沒有充分利用BDS-3高精度自動化的優勢。Notti 等[19]利用低成本GNSS接收機對意大利西北部的邊坡進行持續性監測,監測精度達到毫米級,根據持續性監測數據預測出滑坡起始階段,并建立了半自動化程序用于預測邊坡變形趨勢以識別風險。
2020年7月,中國北斗三號全球衛星導航系統正式開通,在全球范圍內提供授時定位導航服務,北斗系統基于在亞太地區的高中低3種軌道混合星座布局和可視衛星數量優勢,服務性能及定位精度顯著增強[20-22]。因此基于BDS在亞太地區的定位優勢,構建BDS遠程邊坡監測系統,對公路邊坡的開挖變形進行實時自動化監測具有重要的工程價值和實際意義。現將探討BDS遠程邊坡監測系統的構成,并將系統應用于公路邊坡開挖工程的現場監測,以驗證系統的可靠性、穩定性,檢驗系統監測數據自動化采集和傳輸的能力,證實其監測精度的工程可用性。
1 工程概況
G336神木店塔至張板崖公路工程起于神木市店塔鎮高石崖塔,止于神木鎮張板崖,與既有G337相接,路線全長32.21 km。所研究工程為該段公路E匝道邊坡工程,工程所屬地形圖和道路情況如圖1所示。
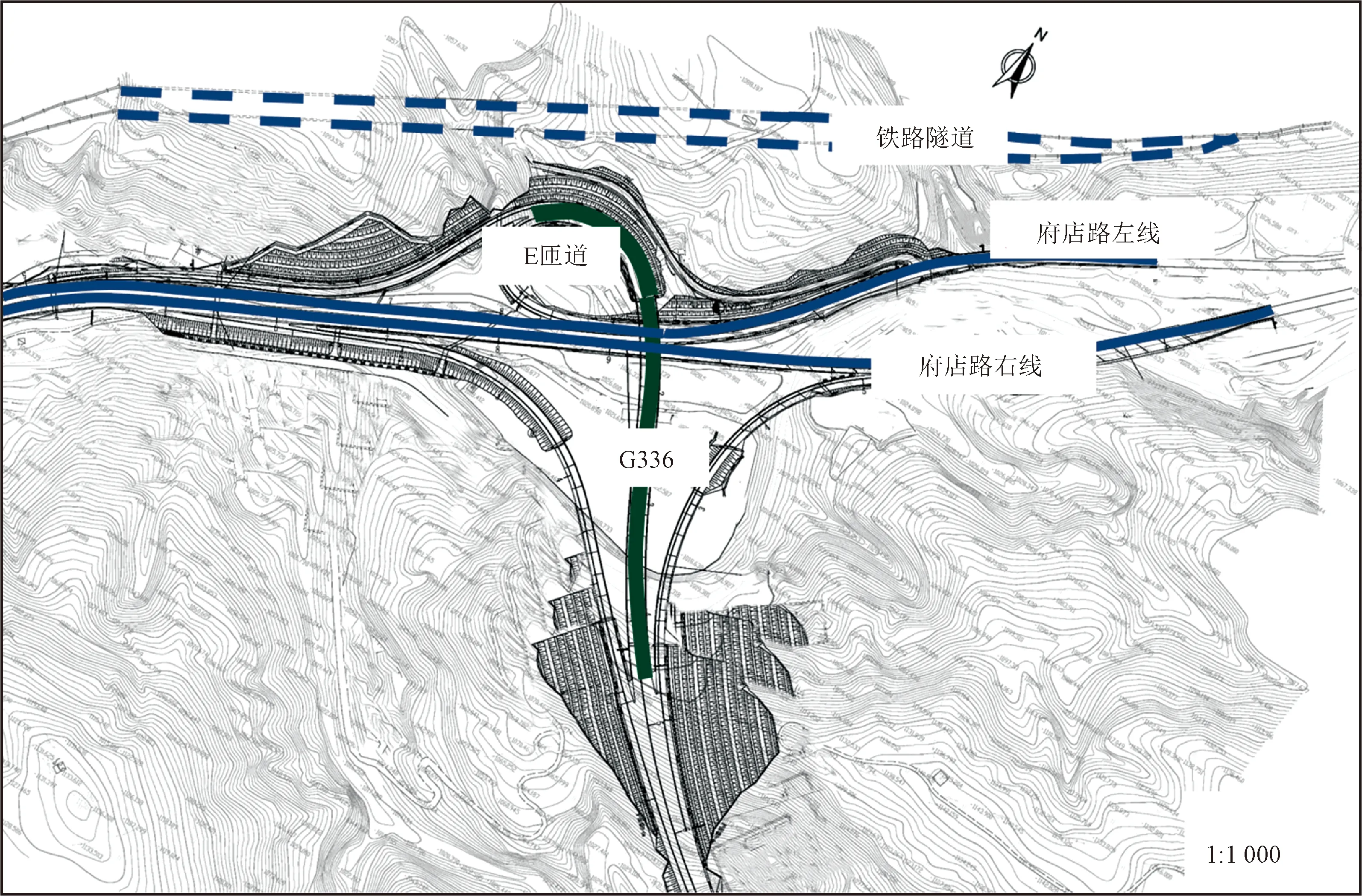
圖1 邊坡工程所屬地形圖Fig.1 Topographic map of slope project
該邊坡工程主要為巖質邊坡,位于山前斜坡地帶,斜坡坡向約135°,開挖邊坡綜合坡率約為46°。邊坡起止樁號為K0+000~K0+084,開挖長度84.0 m,中心最大開挖高度為59.85 m,按照設計圖紙,采用臺階式放坡,坡率分為1∶0.75和1∶0.5兩種,臺階寬度2~8 m(圖2)。
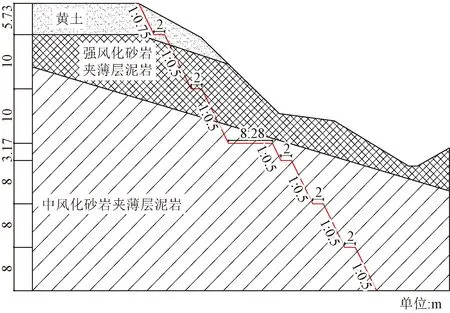
圖2 邊坡開挖剖面Fig.2 Slope excavation section
根據現場調查及公路沿線地形地貌特征,路塹區內地貌單元主要為基巖梁峁-溝壑地貌,巖土體參數如表1所示。地形連續起伏,溝谷深切基巖,多呈“V”字形,該類地貌臨近窟野河河谷,基巖裸露,無黃土或少量黃土覆蓋,出露的基巖主要為侏羅系中統延安組巖層。可劃分為2個工程地質分層。
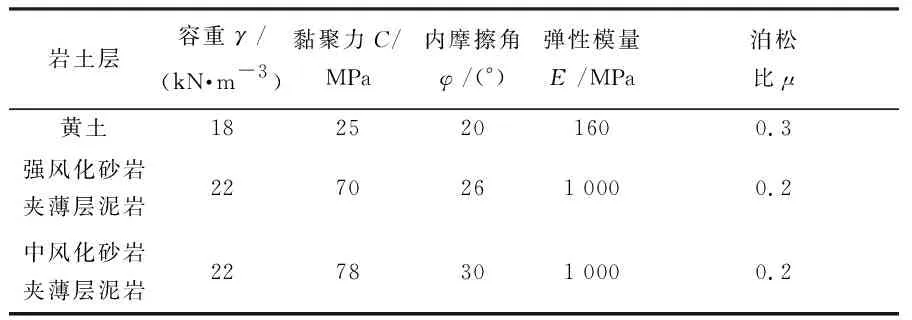
表1 巖土體參數Table 1 Rock and soil parameters
(1)強風化砂巖夾薄層泥巖(J2y)。灰黃色,礦物成分主要為石英、長石,裂隙較為發育,層狀構造,鈣質膠結,巖芯呈現短柱狀或薄片狀,主要為砂巖夾薄層泥巖,砂巖夾薄層泥巖單層厚1.0~4.0 m,泥巖單層厚0.1~0.2 m。
(2)中風化砂巖夾薄層泥巖(J2y)。灰白色,飽和,礦物成分主要為石英、長石,節理裂隙較發育,中粗粒結構,厚層狀構造,鈣質膠結,巖芯呈柱狀,以砂巖夾薄層泥巖為主,砂巖夾薄層泥巖單層厚2.0~5.0 m,泥巖單層厚0.1~0.2 m。
2 確定預警指標的數值模擬
為了合理制定監測方案,明確監測預警指標,首先利用有限元軟件對邊坡進行了開挖模擬分析。邊坡的開挖工況如圖2所示,利用軟件中的model change功能進行開挖模擬,按照臺階式放坡分級開挖模擬,每級放坡開挖作為一個分析步設置。邊坡的巖土體參數如表1所示,邊坡開挖前后的三維模型如圖3所示,三維模型中邊坡開挖面兩側約束法向位移,模型底部約束X、Y和Z3個方向的位移,模型后側約束X、Y方向位移。
根據數值模擬結果分析,邊坡開挖過程中,巖土體變形隨開挖深度的增加而變大,且越靠近開挖處巖土體變形越大。
由于無法在開挖面布設北斗監測點,因此開挖前在坡頂布置了4個監測站(JCD1、JCD2、JCD3、JCD4)用來監測位移變化,根據圖3(b)位移云圖顯示,坡頂的總位移在2~4 mm。開挖模擬顯示的監測點大概的位移變化范圍,該匝道邊坡工程開挖監測方案明確要求變形量小于2 mm/d,結合《建筑邊坡工程技術規范》(GB 50330—2013),三者共同確定BDS遠程邊坡監測系統的日位移預警值為2 mm,累計變形預警值為4 mm。預警值將作為BDS遠程邊坡監測系統是否向相關單位發送位移預警信息的依據。
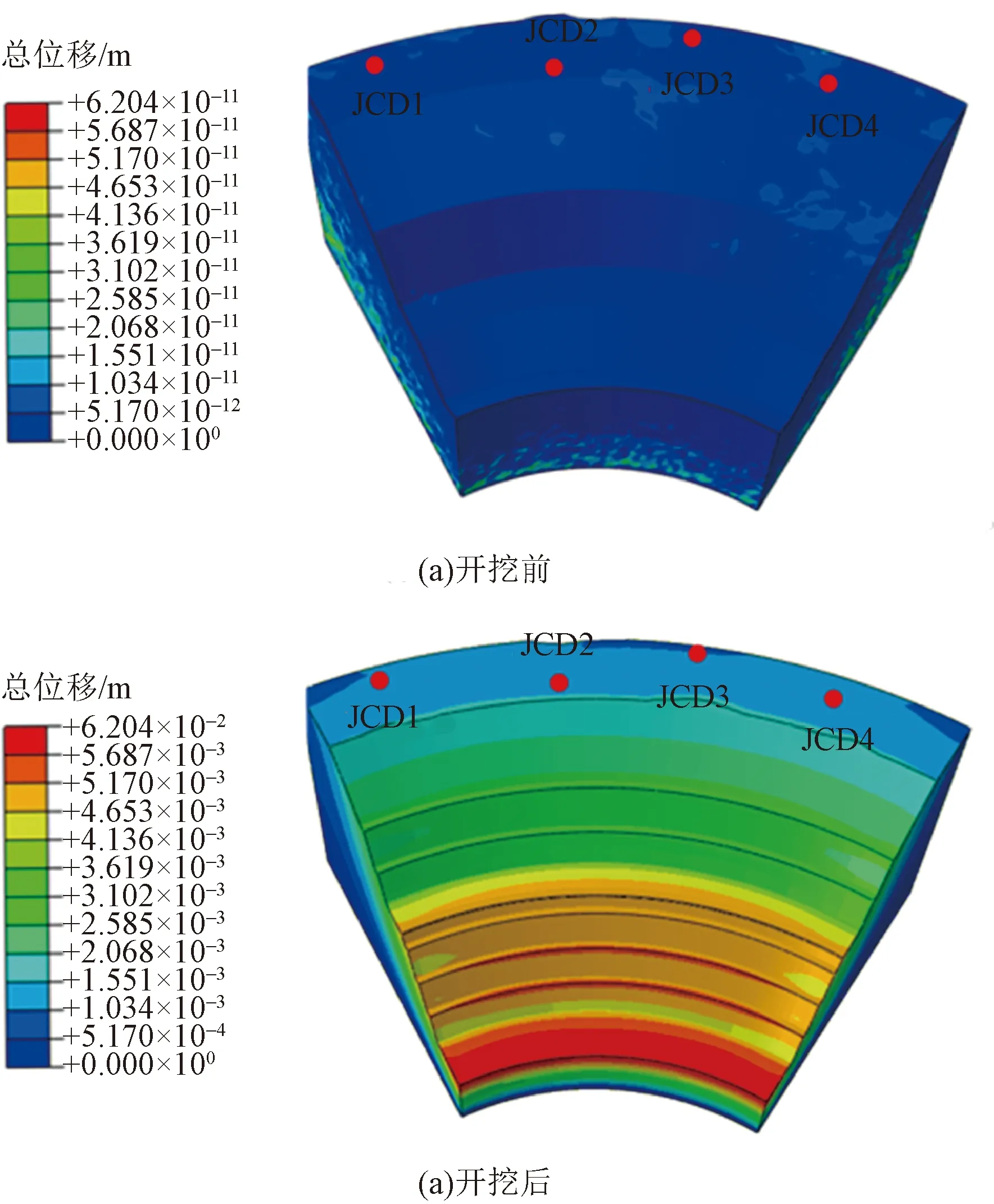
圖3 邊坡開挖有限元模型Fig.3 Finite element model of slope excavation
3 BDS遠程邊坡監測系統構成
3.1 BDS遠程邊坡監測系統的功能和要求
BDS遠程邊坡監測系統應包括數據采集、數據傳輸、數據處理和信息反饋4個基本功能,并達到下列基本要求。
(1)系統長期可靠。考慮到公路施工工期,監測活動持續時間長,同時設備受施工荷載,以及風沙侵擾,因此,要求BDS監測設備長期可靠,能夠抵抗環境干擾。
(2)數據采集實時化、自動化和標準化。能夠自動實時采集監測站的位置數據,并存儲為標準格式,方便數據處理。
(3)數據傳輸準確暢通。監測數據通過4G網絡能夠順暢地傳輸到信息中心,傳輸通道無故障,傳輸過程不出現丟包等問題,保證監測數據準確不失真。
(4)數據處理結果簡潔直觀。監測點的位移處理成位移-時間曲線,累計變形表格等直觀的圖表,并分析數據的可信度,以此判斷工程安全風險。
(5)及時暢通的信息反饋。通過網絡將監測報警信息及時地反饋到電腦、手機等終端,暢通地送達相關單位。
3.2 系統框架
BDS遠程邊坡監測系統由數據采集與傳輸子系統、BDS數據解算子系統及數據發布管理子系統構成,系統構成如圖4所示。

圖4 BDS遠程邊坡監測系統構成Fig.4 Structure of BDS remote monitoring system
BDS遠程邊坡監測系統的功能如下。
(2)BDS數據解算子系統接收到現場監測數據后,通過內置的抗差Klaman移動窗口位移探測算法,對監測和基準站進行高精度差分定位,解算出監測站位移,并將位移數據存儲到云端,即數據發布與管理子系統。
(3)數據發布與管理子系統對數據進行分析處理,獲得相應的位移圖、表,并且對所有監測數據進行存儲和管理。根據累計位移和當天的位移變化,數據發布與管理子系統判斷位移是否超出預警值,若大于預警值,則向相應單位發布預警信息。
3.3 數據采集與傳輸子系統
數據采集與監測系統設備主體位于施工現場,其數據采集工作主要由BDS接收機完成,數據傳輸基于4G無線網絡,數據傳輸示意圖如圖5所示。
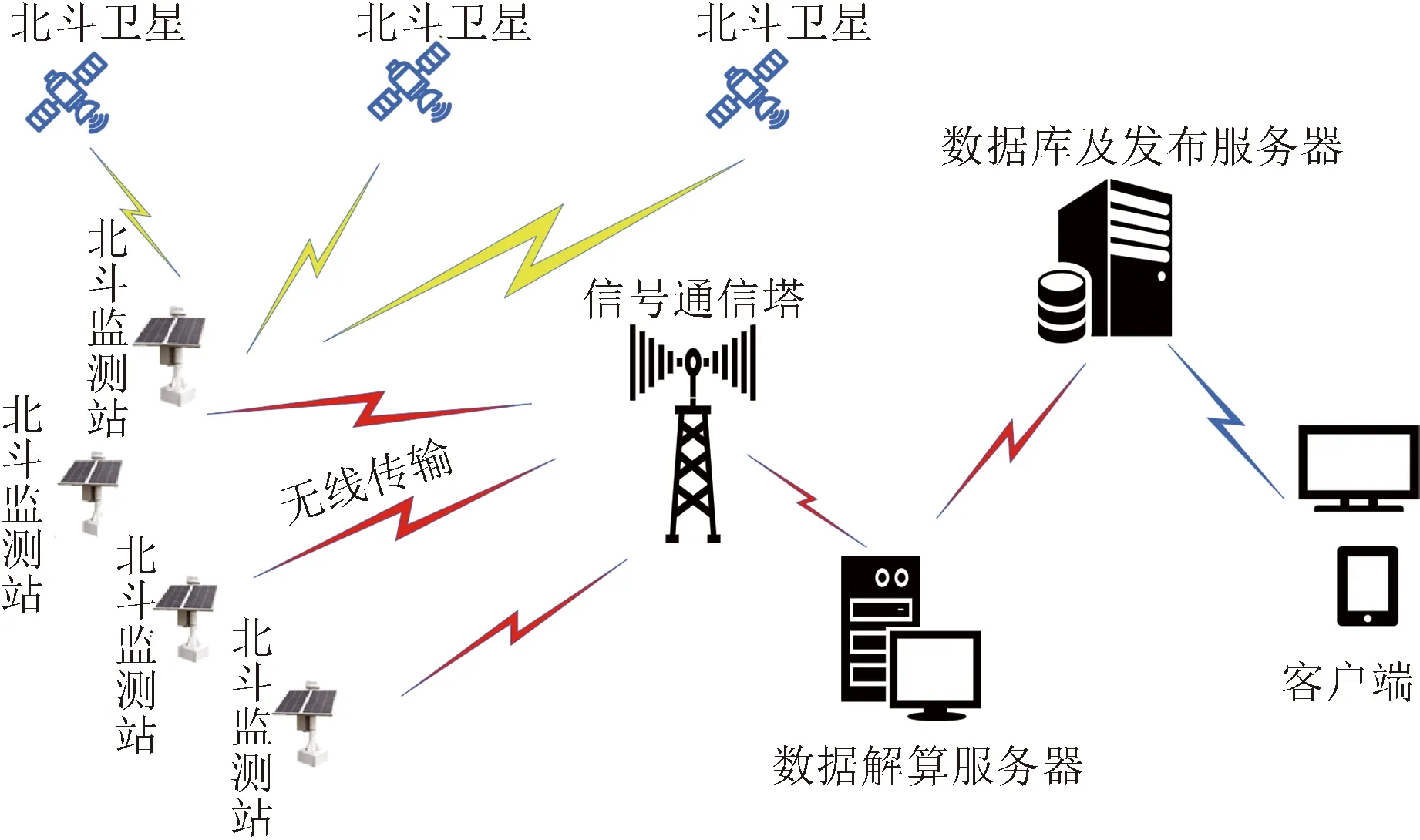
圖5 北斗通信數據傳輸示意圖Fig.5 Schematic diagram of BDS communication data transmission
3.3.1 BDS監測站
BDS監測站是BDS天線、BDS接收機、觀測墩、4G網絡通信模塊和太陽能供電系統的集合。BDS監測站安裝在變形區域選定的監測點上,為保持結構的穩定性,需澆筑混凝土基礎并安裝金屬立柱,保證結構與邊坡巖土體一起移動。監測站通過天線接收北斗衛星信號并將其傳輸到接收機,接收機集成有相應算法,可將位置數據進行預處理和初步解算,并通過4G網絡通信模塊將已初步處理的數據傳輸到BDS數據解算子系統。
3.3.2 BDS基準站
2.3.1人工栽插秧齡控制在30~35天,葉齡5~6片為宜,栽插密度13.3厘米×26.7厘米或20厘米×23.3厘米為宜,土壤肥力高的田塊可適當稀植,土壤肥力低的田塊可適當密植,每穴2粒種子苗,插足基本苗90萬/公頃。
BDS基準站是BDS天線、BDS接收機、觀測墩、4G網絡通信模塊和太陽能供電系統的集合。BDS基準站選址具有嚴格要求,要求場地穩固,沉降和位移穩定,年平均值小于3 mm;視野開闊,障礙物的高度不超過15°;遠離無線電發射源,距離不小于200 m。天線觀測墩高度大于2 m;觀測標志遠離震動源。綜上,確定基準站安裝在黃羊城站房頂,距離現場3.2 km。該點位視野開闊、衛星信號接收良好,且安裝穩定可靠,能夠長期保存。基準站的工作原理和流程與監測站一樣,重點在于保證基準站的觀測墩穩定,基準站的天線不發生位移。
3.4 BDS數據解算子系統
采用自主研發的GNSS Monitor軟件實現衛星觀測數據自動解算,獲取被監測地段地面變化情況。前端工控機中內置自主研發GNSS Monitor軟件,該軟件集成了基于改進部分模糊度法的抗差Klaman移動窗口數據處理模塊,可以處理BDS原始觀測數據。利用差分定位技術,在基準站和監測站之間的觀測數據做差可以獲得高精度基線解算結果,水平及高程測量精度均優于3 mm。
3.5 數據發布與管理子系統
數據發布與管理子系統接收到解算出的位移數據后,對位移數據進行整理和分析,并繪制出位移-時間曲線及各種統計表格,如圖6所示。對監測數據進行處理后,判斷累計位移值和當天位移值是否超出預警指標,超出預警值時,系統通過網絡將報警信息發送到施工單位和建設單位的終端。相關單位根據監測點位移變化情況采取應對措施,阻止變形的發展,保證施工的安全。
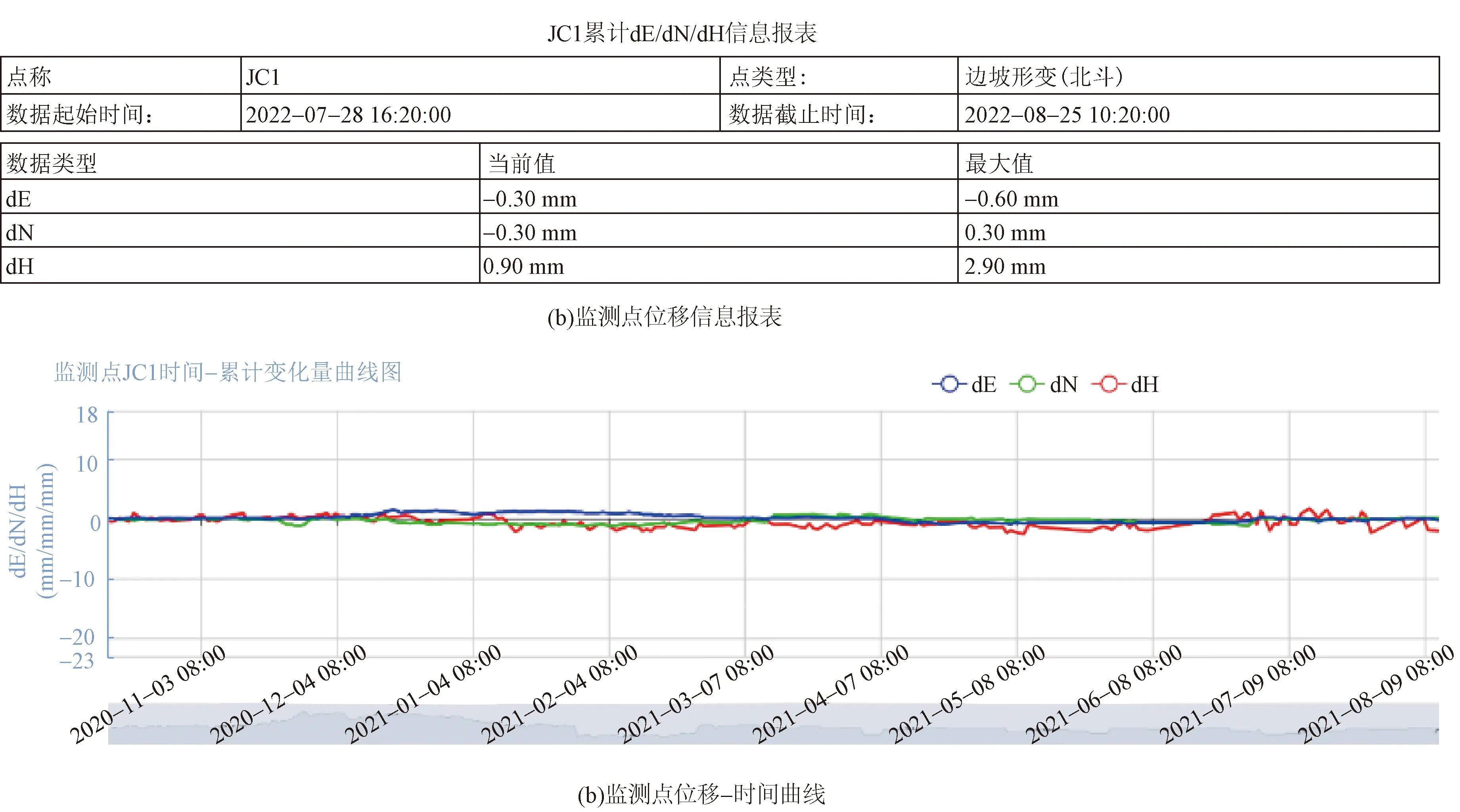
dE、dN、dH分別表示與初始位置相比,監測站在正東、正北及高程方向發生的位移圖6 數據發布與管理子系統Fig.6 Data release and management subsystem
4 BDS遠程監測方案
由于無法在開挖面布設北斗監測點,因此開挖前在坡頂布置了4個監測站用來監測位移變化,監測頻率為1次/d。
根據數值模擬結果,4個監測點的重要程度一致,皆全天候全項目周期監測邊坡巖土體變形。現場監測點布設情況見圖7。
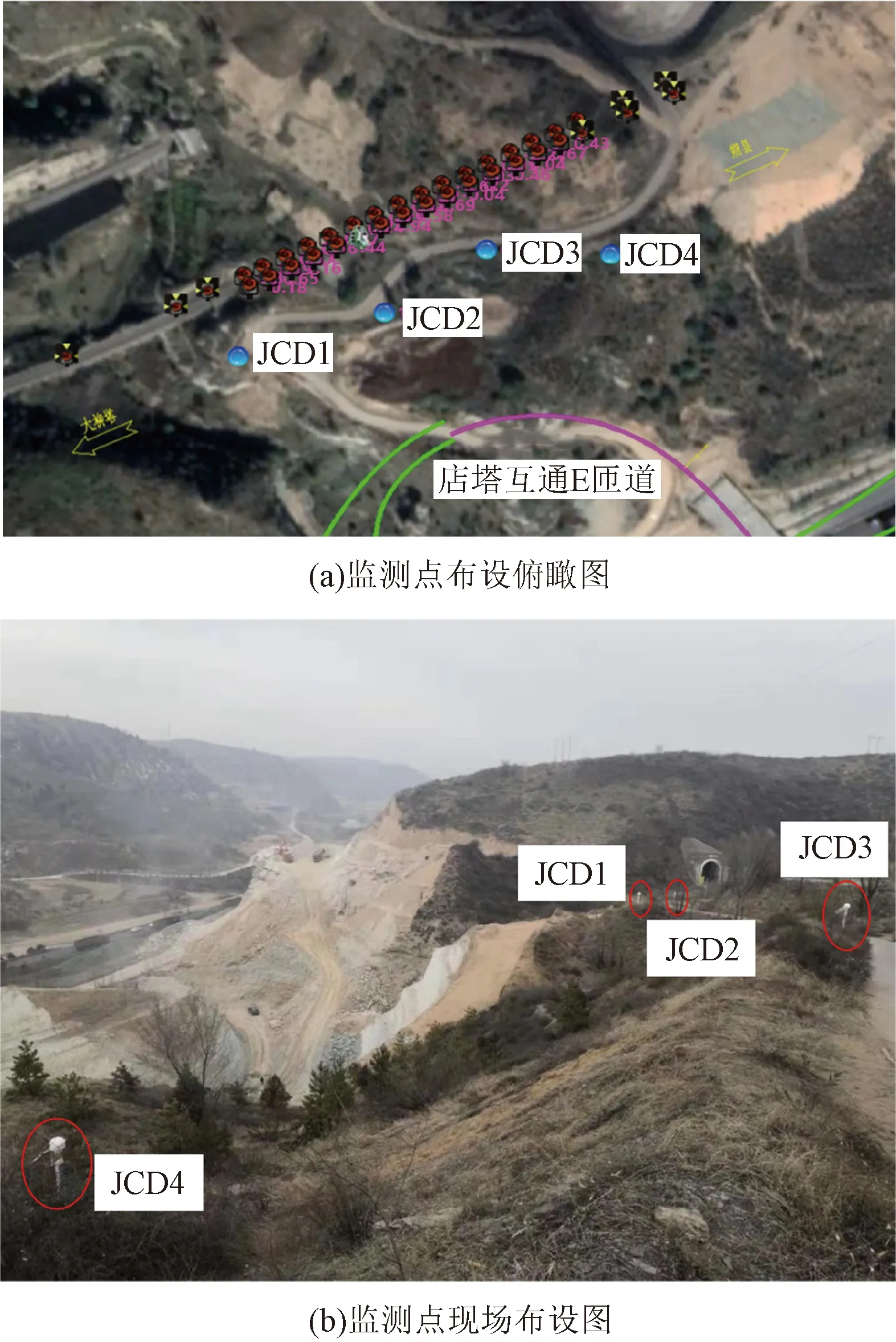
圖7 BDS監測站布設圖Fig.7 BDS monitoring point layout diagram
5 監測結果及穩定性分析
5.1 邊坡開挖位移監測分析
邊坡開挖后,BDS遠程邊坡監測系統始終保持穩定工作。系統保持全天24 h不間斷運行,軟件的解算周期設置為24 h,每天解算一次邊坡形變數據并傳回。
圖8為JCD1~JCD4的現場監測位移曲線,北斗JCD1、JCD2、JCD3和JCD4的水平最大位移分別為1.25、1.55、1.77和1.47 mm。總體上看,4個監測點的豎向位移比水平位移大1 mm左右,兩者差距不大,所以邊坡開挖過程中監測點的水平位移和豎向位移都需要密切關注。相比于水平位移,各監測點的豎向位移變化較大,豎向位移能夠較早地反映邊坡位移變化的速度和趨勢,因此邊坡開挖施工過程中要優先關注監測點豎向位移的變化,以保證施工的安全。
圖9對比了4個北斗監測點的位移變化情況,發現不論水平位移還是豎向位移都是JCD4最小,主要是由于JCD4所在區域開挖相對較晚,且接近開挖邊坡的側邊得到了較好的約束,相反JCD2和JCD3由于位于開挖邊坡的中間區域,開挖后巖土體約束情況變化較大,位移量相對較大。由圖8(a)中可以看到,在開挖即將結束時,4個監測點的豎向位移都突然變大,分析后認為主要是坡腳巖土體的開挖對坡體的擾動較大,以及施工機械在坡腳的移動不停地改變著坡腳的壓力。圖9(b)中4個監測點的水平位移變化比較平穩,其水平位移的最大值處與豎向位移的最大值處吻合,水平位移和豎向位移反映的邊坡變化趨勢一致,說明監測數據可靠有效。
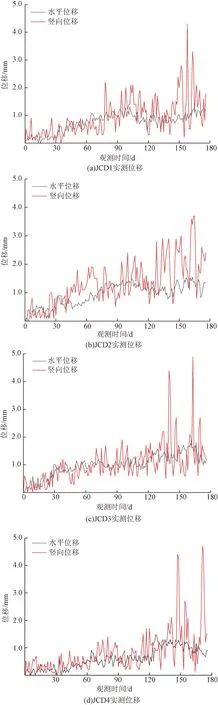
圖8 現場實測位移Fig.8 Field measured displacement
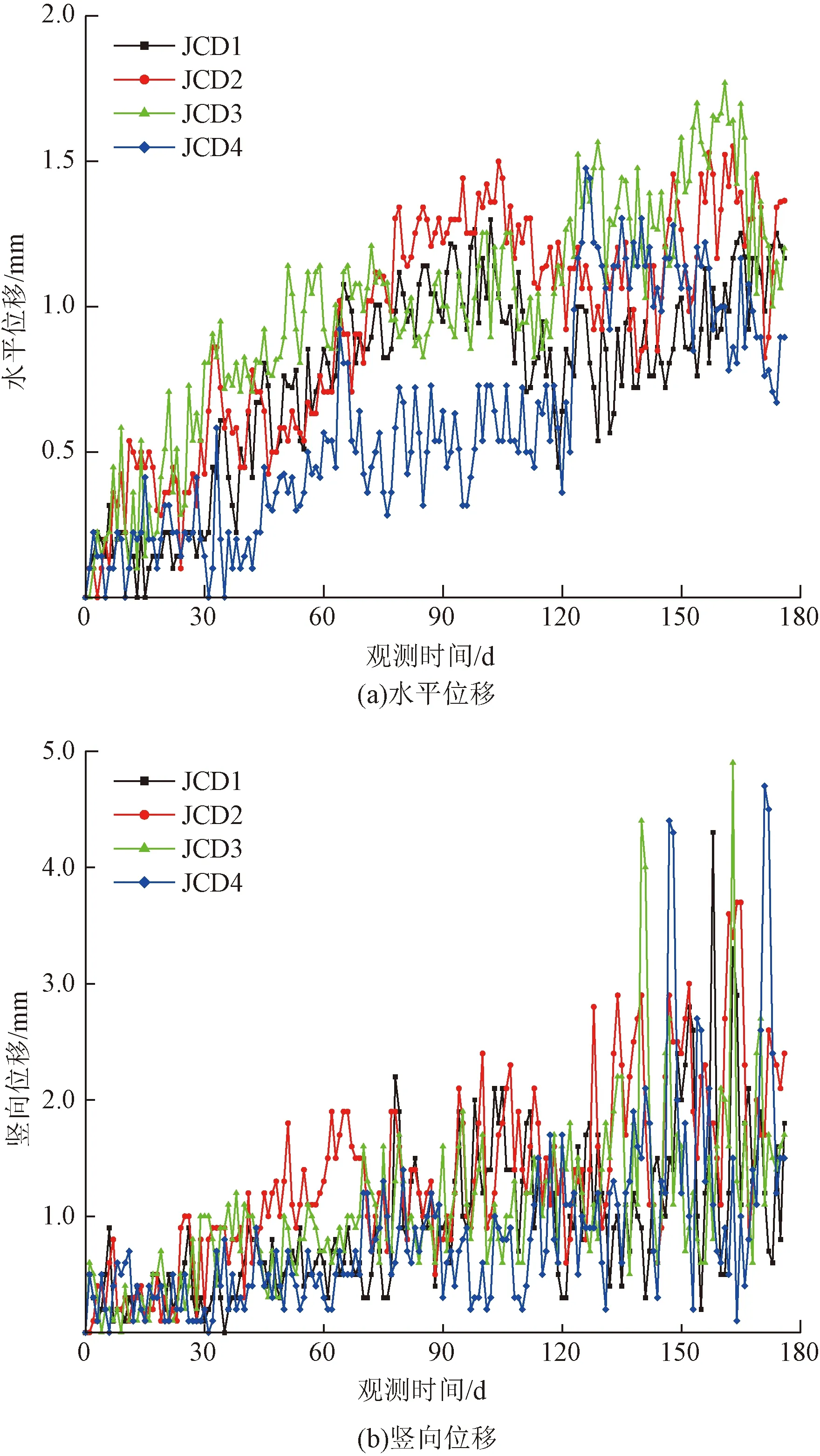
圖9 實測位移對比Fig.9 Comparison of measured displacements
5.2 開挖后邊坡穩定性分析
強度折減法(strength reduction method,SRM)認為邊坡的失穩破壞主要是因為邊坡抗剪強度的減弱,因此引入折減系數進行模擬,邊坡破壞時的折減系數即為邊坡的安全系數[23-25]。模型通過不斷折減莫爾-庫侖本構模型中的黏聚力C和摩擦角φ,進行邊坡強度降低的模擬,公式為
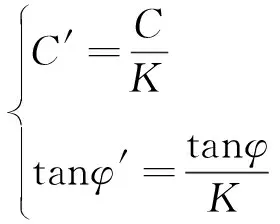
(1)
式(1)中:K為強度折減系數,破壞時的值即為安全系數Fs;C′為折減后的黏聚力;tanφ′為折減后的內摩擦角正切值。強度折減法分析邊坡穩定性的一個關鍵是如何判斷邊坡失穩,目前的失穩判據有三類[26]。
(1)力或位移在數值計算中迭代不收斂。
(2)邊坡土體區發展擴大直至貫通,塑性區貫通即認為邊坡失穩。
(3)邊坡監測點的位移發生突變。
利用強度折減法對開挖后的邊坡進行了穩定性分析,按照迭代計算不收斂的邊坡失穩判據,安全系數Fs=1.25。位移突變判據判定邊坡穩定性的依據是邊坡土體位移是否發生短時劇烈變化,但位移突變判據點的位置及土體位移方向的選取仍未達成共識。圖10選取的位移突變判據點P1~P7包含了坡頂、坡腳以及塑性帶上的點,并輸出了其總位移、水平位移和豎直位移(圖11),用于討論位移突變判據點的選取。其中P1位于坡頂塑性帶區域,其總位移、水平位移和豎向位移在折減系數K=1.23時發生了突變,P2點與P1點同樣位于坡頂,但P2點位于塑性帶之外接近開挖坡面處,其水平位移、豎直位移和總位移都表現出明顯的突變,突變時的折減系數K=1.23。P3位于坡中位置,其位移變化趨勢與P2點相同。P4、P6、P7都位于塑性貫通區,在折減系數不斷增大的過程中,這3個點的位移變化趨勢一致:都是先平緩增大,然后突然快速增大,有一個明顯的位移拐點,此時折減系數K=1.23。P4與P5位置很接近,P5位于坡腳,強度折減法的結果顯示:P5點位移變化不明顯且未有位移突變發生,因此坡腳處的位移不適合作為強度折減法判斷邊坡失穩的依據。綜上可以確定依據判據(3),該邊坡的安全系數Fs=1.23。塑性區在迭代終止的前一個增量步發生了貫通,其折減系數K=1.23,即按照塑性區貫通判據,邊坡安全系數Fs=1.23。從邊坡的安全系數看,邊坡開挖后處于較穩定的狀態,邊坡開挖設計比較合理,也驗證了邊坡開挖過程中沒有立即進行支護的合理性。
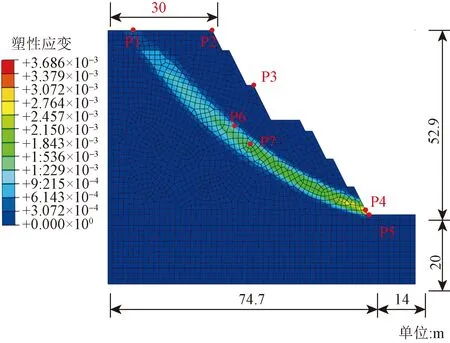
圖10 邊坡開挖后穩定性分析Fig.10 Stability analysis after slope excavation
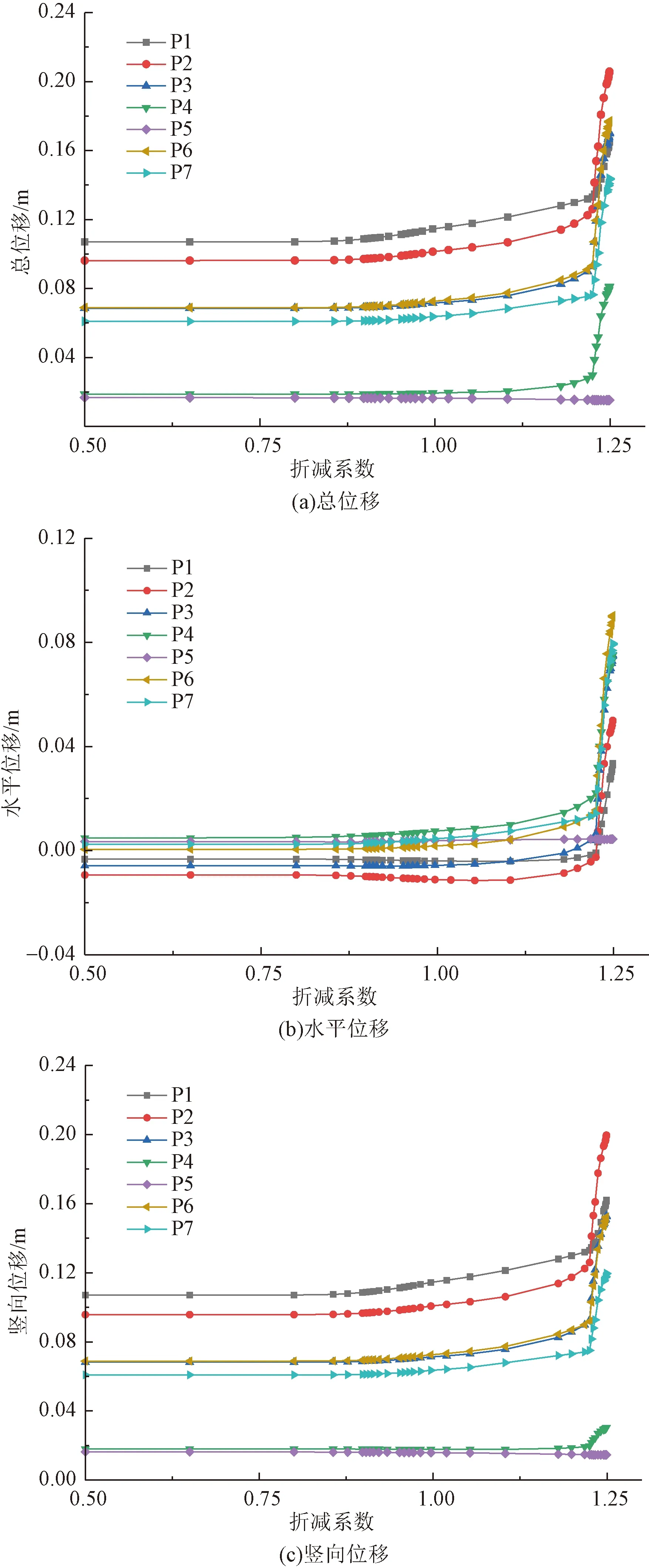
圖11 位移與折減系數關系曲線Fig.11 The relationship between displacement and reduction coefficient
6 結論
通過構建BDS遠程邊坡監測系統,對公路巖質邊坡的開挖過程進行了實時自動化位移監測,結果表明BDS遠程邊坡監測系統穩定可靠,可以實現數據自動化采集和傳輸,解算精度完全滿足工程需要。主要結論如下。
(1)構建了BDS遠程邊坡監測系統,集數據采集、數據傳輸、數據處理和信息預警功能于一體,能夠實現可靠的實時自動化工程監測。該監測系統由數據采集與傳輸子系統、BDS數據解算子系統及數據發布管理子系統構成,數據采集與傳輸子系統包括BDS天線、接收機、4G網絡通信模塊,用于接收處理傳輸北斗衛星信號數據,BDS數據解算子系統將傳輸至信息中心的服務器進行高精度基線網平差解算,信息中心的數據發布管理子系統對實時解算坐標數據進行發布,并將預警信息及時反饋到管理部門。
(2)BDS遠程邊坡監測系統在G336邊坡開挖施工上的成功應用,解決了邊坡工程自動化監測的技術難題,證明了BDS遠程邊坡監測系統的可靠性、實時性以及有效性,為保障邊坡開挖安全起到了至關重要的作用,可以在類似工程中推廣應用。
(3)通過變形監測發現,雖然邊坡開挖過程中其巖土體水平位移與豎向位移大小在同一數量級,但是放坡開挖過程中邊坡的豎向位移始終比水平位移大,能夠較早反映開挖過程中邊坡巖土體位移狀態和趨勢,工程施工過程中需要重點關注。
(4)采用強度折減法對開挖后的邊坡進行穩定性分析,發現利用位移突變作為邊坡失穩判定依據時,坡腳處不存在位移突變特征,因此監測點應盡量選取邊坡中上部或者塑性帶附近,可以反映邊坡土體真實的位移狀態。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2020年1期)2020-09-21 09:24:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
