600 km/h高速磁浮列車明線交會橫向氣動性能
2022-01-27 14:15:04楊永剛陳大偉梅元貴
振動與沖擊 2022年1期
楊永剛, 陳大偉, 梅元貴
(1. 蘭州交通大學 甘肅省軌道交通力學應用工程實驗室, 蘭州 730070;2. 中車青島四方機車車輛股份有限公司, 山東 青島 266111)
磁浮列車明線高速交會時,側向氣動力、側滾力矩和偏航力矩發生劇烈波動。明線交會產生巨大的瞬態壓力沖擊對列車側窗和車體強度均會帶來嚴重影響,交會壓力波嚴重時會導致車窗玻璃破碎的危險。橫向氣動力和側滾力矩的急劇變化,會導致車體橫向擺動和側翻、傾斜,嚴重時會導致車體底部設施和線路設施發生損壞;偏航力矩的劇烈變化會引起列車的“蛇行運動”[1-5],這種現象隨交會速度的增加而更加嚴重。我國時速600公里高速磁浮列車設計運行速度為600 km/h,是目前高速列車中設計運行速度最高的,明線交會時,底部氣流橫向流動受到T型軌限制,側向氣動力波動更加劇烈,引起車體發生橫向擺動和側滾運動[6],最終導致懸浮間隙發生變化[7-8],嚴重時引起車體與軌道梁產生磨損,最終危及行車安全。因此,必須對我國600 km/h高速磁浮列車明線交會橫向氣動性能進行深入研究。由于目前對列車交會過程中的氣動作用力很難通過實車試驗和動模型縮尺實驗直接測量,目前的間接測量方法要準確獲得交會過程中的氣動力有一定困難[1],基于此,對我國600 km/h高速磁浮列車橫向氣動性能的數值模擬研究是亟需的。
國內外對于高速磁浮列車明線交會氣動性能的研究,主要是針對我國上海磁浮和日本磁浮。Suzuki等[9]對日本山梨線MLX01列車在明線高速交會時,側向力和側滾力矩的變化特性,以及橫向擺動位移做了相關研究,為磁浮列車懸浮間隙、電磁力設置提供了試驗數據。對于我國上海磁浮,做了大量的明線交會空氣動力學性能試驗,為后續研究我國TR08磁浮列車相關空氣動力學問題提供了實車試驗數據和依據[10-11]。畢海權等[11-12]對上海磁浮列車明線以相對速度860 km/h和1 000 km/h交會時的壓力波進行數值模擬,發現明線高速交會時,車體發生大的橫向振動,結果為進一步研究磁浮列車運行安全、舒適度等動力學性能奠定了基礎。梁習鋒等[13]對橫風作用下,磁浮列車明線交會時的橫向氣動性能進行數值模擬研究,為后續研究磁浮列車在大風環境下的運行安全性提供可靠數據。Huang等[14]采用三維數值模擬方法,研究了上海磁浮列車以430 km/h在明線等速交會時列車表面壓力和列車風,給出了站臺安全距離,為磁浮列車站臺設置、以及通過站臺速度提供理論依據。陳敬旭[15]采用三維數值模擬方法,對比了新型磁浮列車和TR08列車明線交會時的橫向氣動性能,新型列車的氣動性能明顯優于TR08列車,為磁浮列車氣動外形設計提供參考。劉堂紅等[16-18]以減緩明線交會壓力波為目標,對我國磁浮列車進行氣動外形優化,推薦出氣動性能較優的列車外形,其氣動性能明顯優于TR08磁浮列車,為磁浮列車外形設計提供參考依據。由于日本山梨線車輛在“U”型導軌槽中運行,而600 km/h磁浮車輛環抱“T”型導軌運行,軌道結構完全不一樣,明線交會時,列車橫向氣動性能相差很大。上海磁浮列車明線的最高運行速度為430 km/h,與600 km/h磁浮列車速度相差較大,而且TR08和600 km/h列車的氣動外形有明顯差異,特別是曲線頭部長度,導致氣動性能相差很大。因此,上海磁浮和日本磁浮氣動性能的前期研究,為600 km/h磁浮列車提供數據參考時存在局限性,有必要對我國600 km/h磁浮列車的氣動性能進行研究。
本文采用三維數值模擬方法,對我國600 km/h高速磁浮列車明線交會橫向氣動性能進行數值模擬研究,探討了明線交會壓力波和氣動力的變化原因和變化規律,以及車速的影響特性。為600 km/h磁浮列車電磁力、懸浮間隙、線間距和各方向阻尼等設置提供基礎數據;最后通過分析流場特性,為局部外形氣動優化提供參考;為今后進一步研究列車運行安全、舒適度等動力學性能奠定基礎。
1 計算模型
磁浮列車以600 km/h運行時,馬赫數為0.49,當馬赫數大于0.3時,空氣流動為可壓縮流動,因此,磁浮列車明線運動時,列車周圍的流場為可壓縮流動。RANS下的k-ωSST湍流模型在列車空氣動力學中有廣泛應用[19-21]。采用STAR-CCM+軟件和k-ωSST湍流模型,壓力-速度耦合采用SIMPLE算法,對流項采用二階迎風格式,時間離散采用二階隱式格式,速度、壓力求解采用AMG線性求解器。非定常時間步取0.001 2 s,每個求解步含內迭代20次。壁面處理采用全y+方法。列車運動通過STAR-CCM+軟件中重疊網格方法[22]實現。
1.1 列車和軌道模型
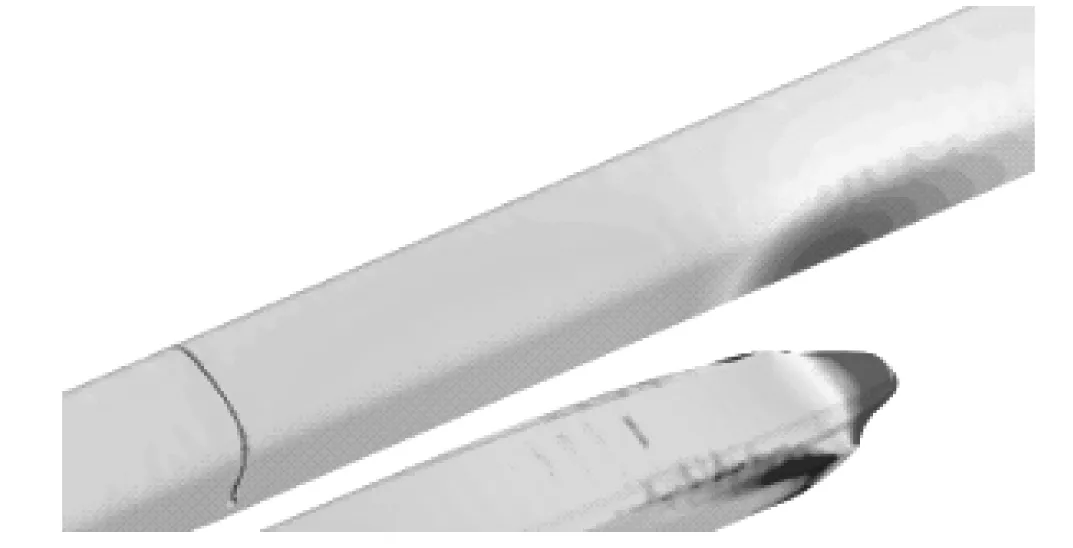
根據列車設計運行時的實際編組情況,列車計算模型采用5編組全尺寸600 km/h高速磁浮列車模型。取列車懸浮架最底部到車頂最高位置的距離為車高,車高4.20 m,頭尾車長28.08 m,鼻長16.5 m,中間車長24.52 m,5編組列車全長130 m,車寬3.70 m。列車計算模型忽略了車體外部的復雜細節,保留了風擋、滑橇等關鍵結構,幾乎還原了真實的磁浮列車外形結構,其空氣動力學外形如圖1和圖2所示。
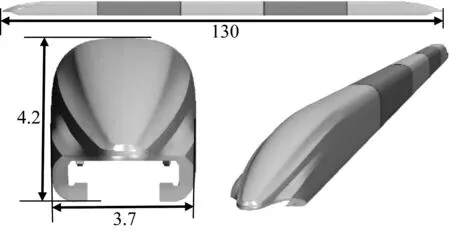
圖1 磁浮列車氣動外形(m)Fig.1 Maglev train model(m)
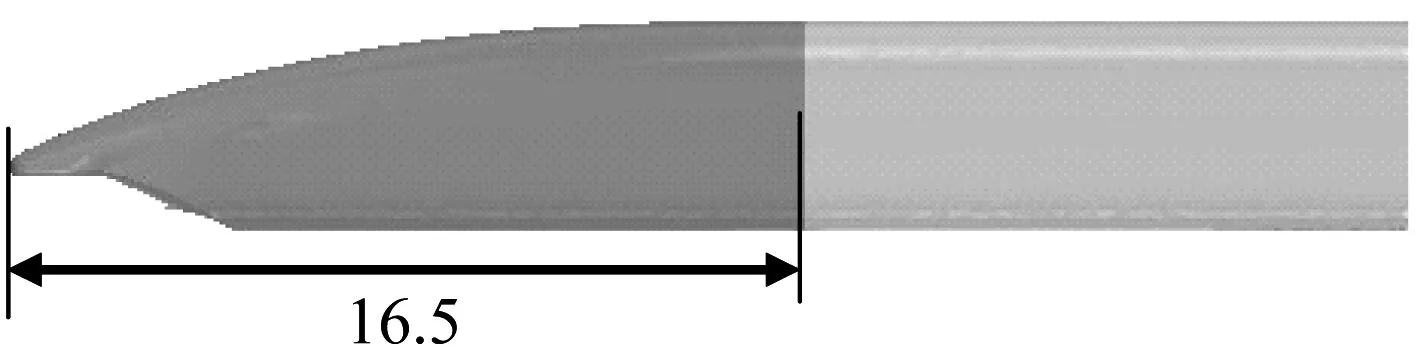
圖2 頭尾車流線段(m)Fig.2 Stream line zone(m)
軌道梁采用600 km/h高速磁浮列車的T型軌道梁,軌道梁高1.25 m,軌道梁上表面寬2.8 m,下表面寬1.94 m,橫截面積為2.19 m2,線間距5.6 m,如圖3所示。為準確模擬軌道梁周圍的流場特性,軌道梁盡量保持真實幾何外形。
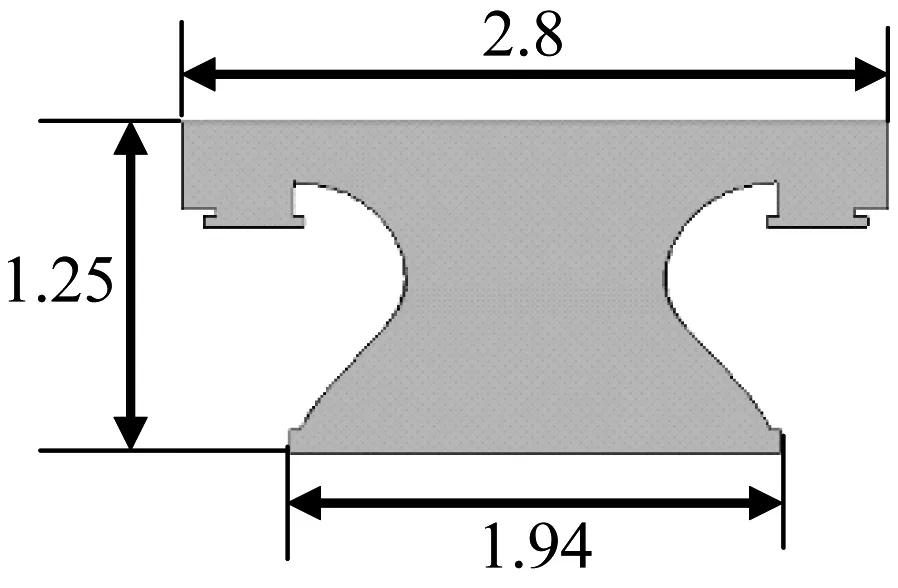
圖3 T型軌道梁幾何模型(m)Fig.3 T Type track model(m)
根據CEN標準[23],壓力系數、側向力系數、側滾力矩和偏航力矩系數定義如下
壓力系數:
(1)
側向力系數:
(2)
側滾力矩系數:
(3)
偏航力矩系數:
(4)
式中,ρ為空氣密度,取值1.225 kg/m3;v為列車運行速度;S為參考面積,取值12.0 m2;F為橫向氣動力;Mx是對縱向軸線x軸取矩,h取列車軌面以上高度3.3 m;Mz是對z軸取矩,l取一半車廂長度12.26 m。
1.2 計算區域
計算區域如圖4所示,計算域長1 600 m,高200 m,寬400 m,交會前,兩車車頭鼻尖相距1 040 m。
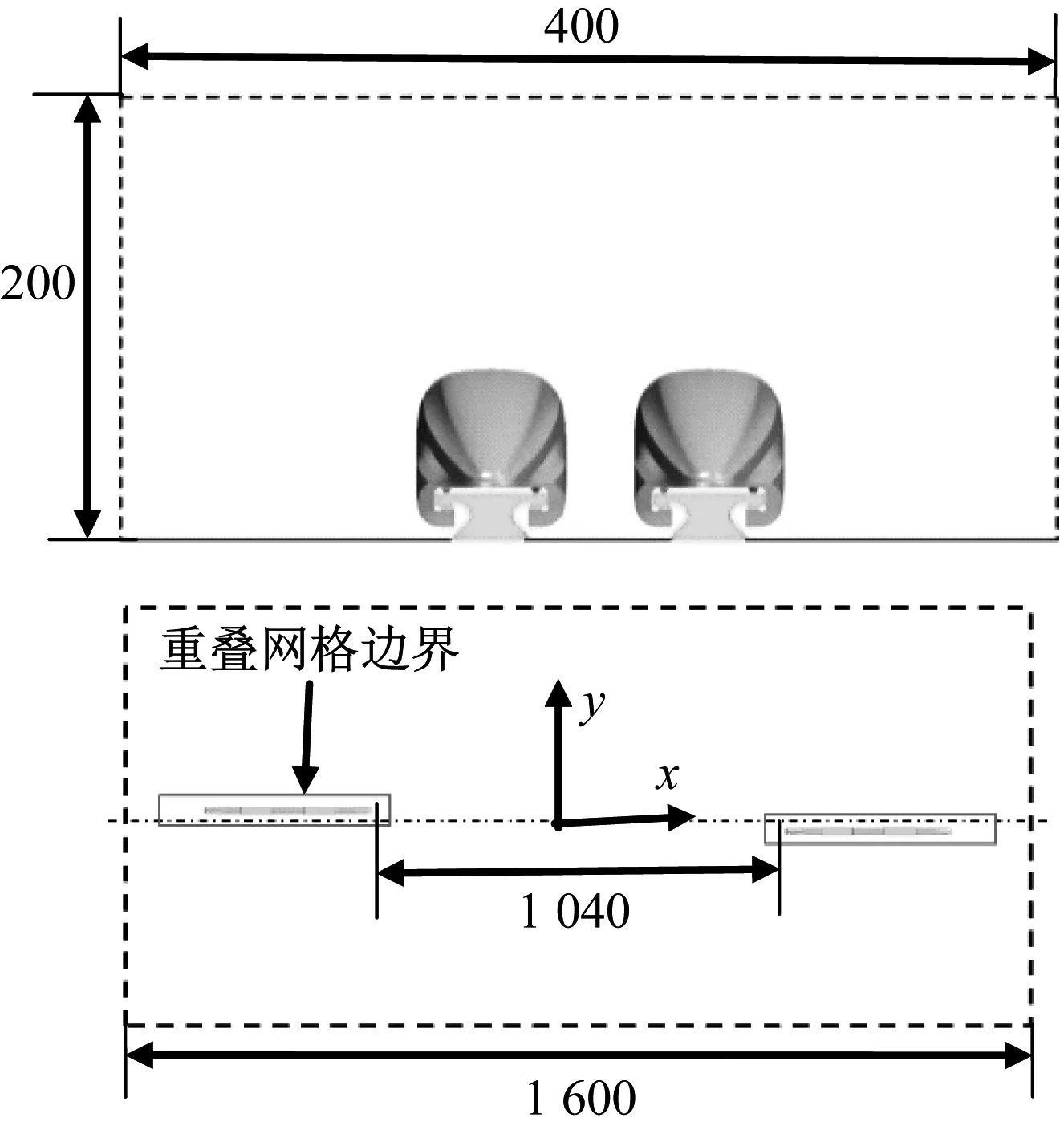
圖4 計算區域示意圖(m)Fig.4 Computational domain(m)
圖5給出了計算域邊界類型,列車表面、軌道梁表面和路基表面為無滑移固體壁面,其切向速度都設定為0。外開闊空間的各表面為自由流邊界,用于模擬無窮遠處的可壓縮流動,它使用黎曼不變量來確定邊界處的流動變量。
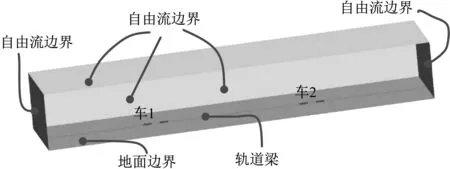
圖5 邊界條件示意圖Fig.5 Boundary conditions
1.3 初始條件
計算對應的空氣參數按照海平面國際標準大氣(ISA)給定。在t=0時刻,列車和周圍流場均靜止,各處壓力等于參考壓力,即標準大氣壓;湍流物理量也處處為零,溫度為288 K。在求解過程中,為了避免出現非正常物理量波動[24-25],采用光滑啟動技術,即列車由靜止逐漸加速至實際運行速度,列車光滑啟動距離為300 m。
1.4 網格劃分
車頭和車尾處流場變量梯度很大,對車頭迎風區和車尾尾流區局部加密。在列車底部、滑撬和風擋附近流場變化劇烈且容易形成漩渦流動,對這些區域單獨加密;列車底部和軌道梁間的垂向間隙很小,垂向方向流場變化復雜、劇烈,采用各項異性加密塊進行垂向加密。列車附近到計算區域遠場空間,流場變化逐漸減小,列車附近到遠場區域采用網格逐漸由密變疏、均勻過渡的網格密度控制方法。在車體表面和軌道梁表面設置10層邊界層,y+取30,近壁面第一層網格厚度為0.264 mm,拉伸比1.2。通過對計算后的流場加以檢驗性計算,最終劃分出合理的網格。計算模型采用Trim網格和Prism網格,網格總數6 000萬,如圖6所示。
1.5 壓力測點布置和力方向定義
為了研究車體表面的壓力變化特性,以及交會側壓力與橫向氣動力的相互關系,在列車運行方向上,每節車廂的中間橫截面處布置如圖7(a)所示測點,其中,測點1位于交會側。將沿y軸正方向的橫向氣動力定義為正側向力,負方向的為負側向力。磁浮列車懸浮在軌道梁上,與軌道梁沒有直接接觸,明線交會時,列車沿縱向對稱面來回側翻,而且列車向內側翻和向外側翻幅度相當,因此將側滾力矩的軸取在車體縱向對稱面和軌平面的交線,更符合實際情況。每節車廂偏航力矩的取矩點定在每節車廂的幾何中心位置。坐標軸和氣動力方向如圖7(b)所示。z方向的零點為軌平面位置。

(a) 曲線頭部網格

(b) 車身截面網格
(c) 車體表面網格圖6 網格展示圖Fig.6 Computational mesh
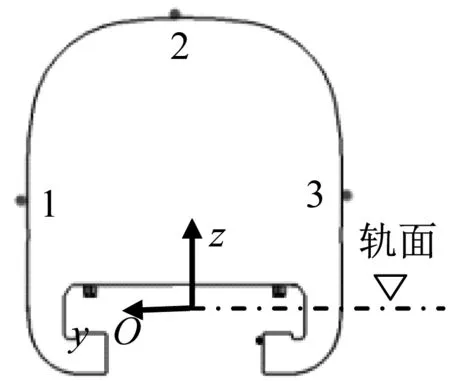
(a) 測點布置圖
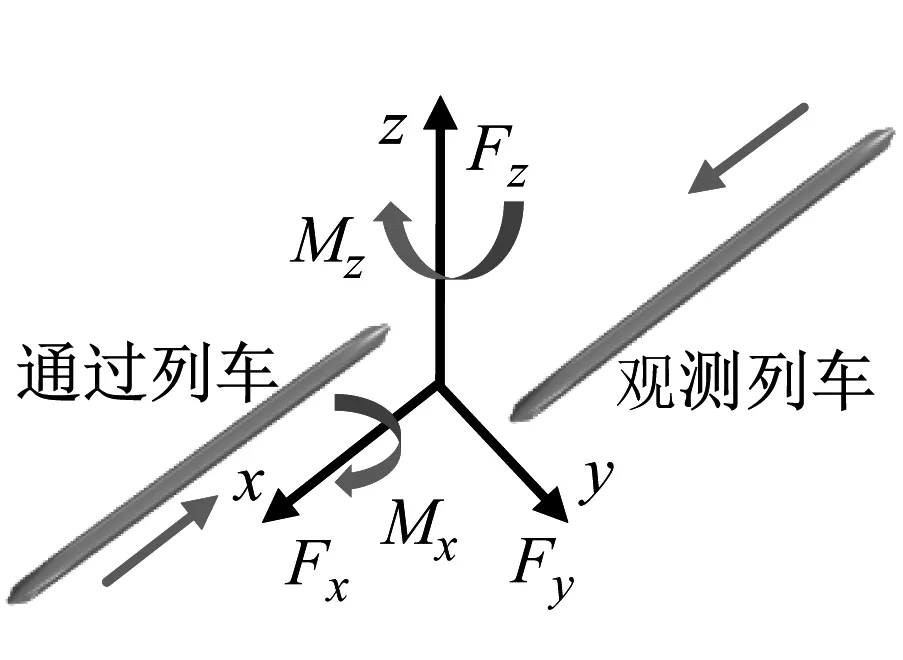
(b) 坐標軸示意圖圖7 測點布置和坐標軸示意圖Fig.7 Monitoring points and axises
2 計算結果與分析
2.1 計算方法驗證
2003年7月,我國在上海磁浮線,采用TR08列車進行了空氣動力學實車試驗。為了研究列車明線交會時,車體表面的壓力變化特性,在交會側車體表面布置壓力監控點,如圖8所示。實車試驗所用的列車為:5編組(PV2)和2編組(PV3),試驗在PV3上進行。數值模擬驗證中,列車模型、軌道和地面條件盡量保持與實車試驗一樣。對靜止交會中(PV2速度為500 km/h,PV3靜止),P3監測點的壓力進行對比,如圖9所示,pmax為會車壓力波最大正壓值;pmin為會車壓力波最大負壓值。
由圖9可知:實車試驗與數值模擬的壓力波動趨勢基本吻合,壓力峰值相差很小。表1統計了其壓力波最值,交會壓力波的最大正負壓值誤差分別為2.9%、7.1%。由于實車試驗時存在很多干擾因素,如實際風速不可能為零、車身個別部件的突起等,因此計算結果有一定程度誤差是合理的。TR08和600 km/h磁浮列車網格劃分方法和網格尺度幾乎完全一樣,而且數值求解模型也完全一致。因此,采用TR08會車壓力波來驗證論文采用的計算方法和網格劃分方法是有效的。因此,論文所采用的計算模型和計算方法有足夠的精度,計算模型正確,可用于求解高速磁浮列車明線交會空氣動力學問題。
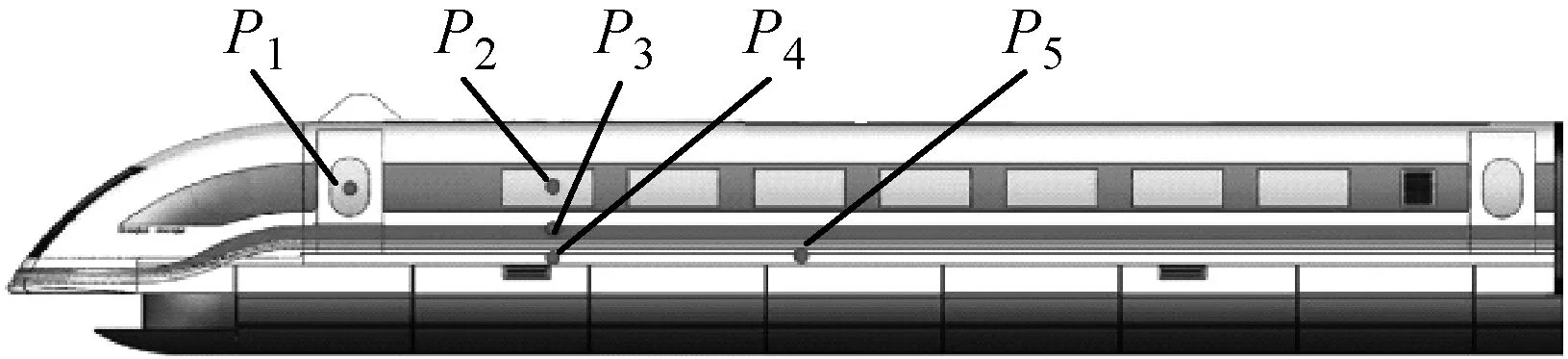
圖8 壓力傳感器布置示意圖Fig.8 Sensor placement and labels
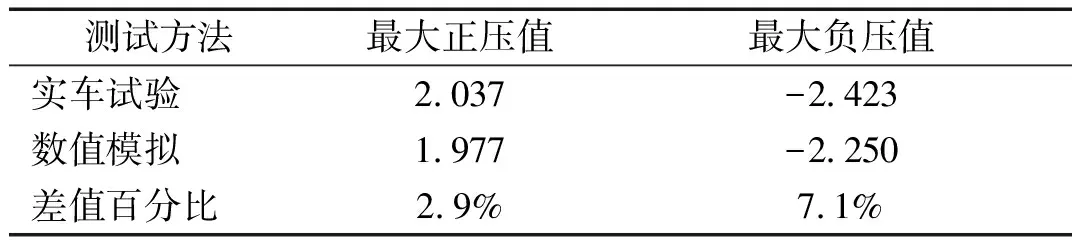
表1 P3點壓力最值Tab.1 Pressure peak of P3
2.2 車體表面壓力變化特性
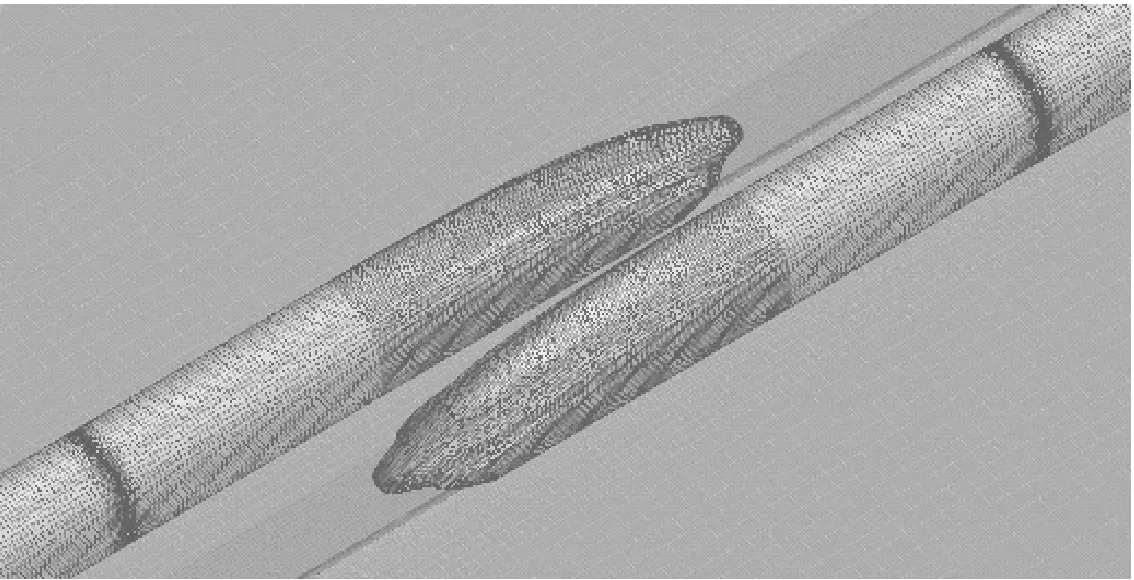
以600 km/h明線等速交會為例,研究列車明線交會時的流場特性。圖10給出了明線穩定運行時車體側面(垂直于z軸,z=0.35 m處,圖中黑色點劃線位置,軌平面位置處z=0)的壓力分布曲線,由于列車沿xOz平面對稱,取一側表面的壓力進行分析,0位置為車頭鼻尖點。由圖可知:當列車在明線穩定運行時,頭尾車流線區域的壓力波動幅度很大,車頭壓力波動幅度大于車尾的波動幅度。在車頭鼻尖位置,由于車頭對周圍空氣的擠壓形成高壓區,在設備艙前端導流區域,車體側面的負壓較強,接近平直車身,壓力逐漸恢復至零附近。從尾車流線段開始向車尾鼻尖,受空氣繞流及分離流動的影響,車體側面的壓力從零附近開始減小,在設備艙導流區域處,車體側面的壓力減小到極小值;隨后,壓力開始快速增大,在車尾鼻尖處,增大到極大值。平直車身表面的壓力接近于零,幾乎沒有壓力波動,風擋處存在較大的壓力波動。列車側面這種壓力分布特性,在明線交會時,會輻射到觀測列車上,與觀測列車側面的壓力疊加,引起劇烈的壓力波動,最終導致列車受到大幅波動的側向力作用,引發車體產生橫向擺動和側翻運動。

圖10 車體水平截面的壓力分布Fig.10 Pressure distribution of horizontal-sectional plane
圖11表示了磁浮列車明線交會過程中,車體表面的壓力變化情況。當車頭通過觀測列車時,鼻尖正壓區先通過觀測列車,觀測點的壓力上升,流線段的負壓區隨即通過觀測列車,觀測點的壓力下降。因此,當車頭通過時,觀測列車瞬間受到正、負壓力的相繼作用。當車尾通過觀測列車時,流線段的負壓區先通過觀測列車,觀測點的壓力下降;鼻尖正壓區隨后通過觀測列車,觀測點的壓力上升。既車尾通過時,觀測列車車體瞬間受到負、正壓力的相繼作用。平直車身通過時,觀測列車的壓力幾乎沒有變化。
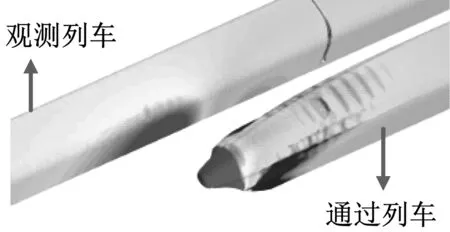
(a) 車頭通過
(b) 平直車身通過
(c) 車尾通過
2.3 明線交會壓力波
2.3.1 各節車壓力波
圖12表示了兩磁浮列車以600 km/h明線等速交會時,頭車平直車身交會側測點1和非交會側測點2的壓力時間歷程曲線。由圖12可知:相比交會側壓力,非交會側的壓力波動幅度很小,明線交會對非交會側的壓力影響較小,取交會側的壓力進行后續研究。
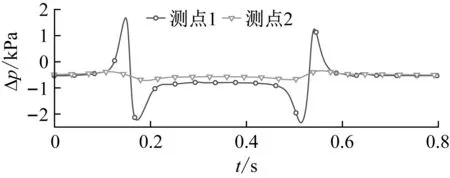
圖12 頭車平直車身測點壓力Fig.12 Pressure of leading car’s straight body
圖13表示了列車明線交會時,頭車、3車和尾車平直車身交會側測點1的壓力時間歷程曲線,將3車和尾車壓力的時間進行平移,使不同車廂的壓力峰值放到一起,便于對比。由圖13可知:車頭鼻尖正壓區通過時,觀測點壓力快速增大到正峰值,車頭曲線段負壓區隨后通過時,觀測點壓力快速減小,由正峰值快速變為負谷值,既“頭波”;平直車身通過時,觀測點壓力處于微小的負壓狀態;車尾曲線段負壓區通過時,觀測點壓力快速減小到負谷值,車尾鼻尖正壓區隨后通過時,壓力由負谷值快速增大到正峰值,既“尾波”。因此,列車明線交會整個過程中,各節車廂交會側壓力都呈現出明顯的“頭波、尾波”,各測點受通過列車的壓力作用時間也一樣,各節車廂交會側壓力變化幅度相差不大。
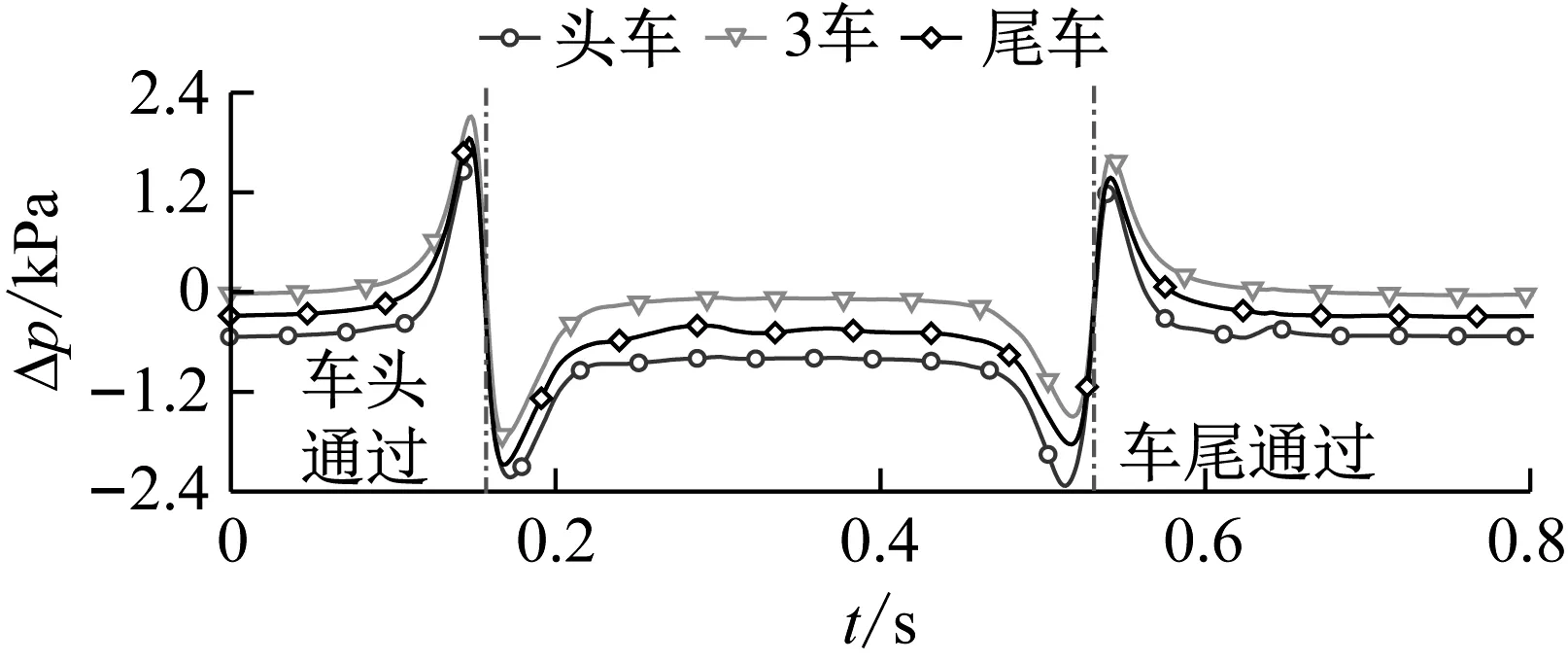
圖13 不同車廂測點1壓力Fig.13 Pressure of different cars’ point 1
表2統計了明線交會時各節車廂測點1的壓力最值。由表2可知:頭車的壓力波動幅度最大,尾車的次之,3車的最小,所有中間車廂的壓力波動幅度相差不大。頭車的最大正壓值為1.68 kPa,最大負壓值為-2.33 kPa。表2中峰峰值是整個會車過程中,壓力時間歷程曲線中的最大值與最小值的差值,既會車壓力波的峰峰值具體為Δp=pmax-pmin,pmax為會車壓力波最大正壓值;pmin為會車壓力波最大負壓值,見圖9。氣動力也是同樣定義。
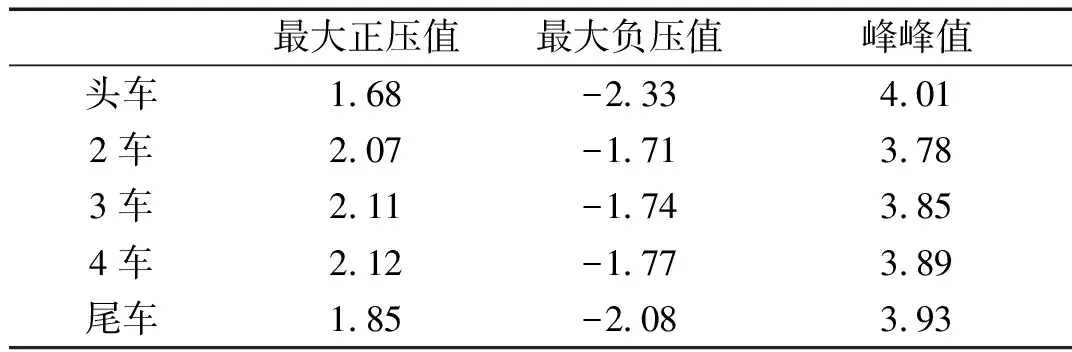
表2 各節車廂測點1的壓力最值
2.3.2 車速對壓力波的影響特性
以400、450、500、550、600和660 km/h明線等速交會時的壓力波為例,研究車速對壓力波的影響特性。由圖13可知,不同車廂交會側測點1的壓力波動規律一樣,因此,以頭車的壓力波為例,說明車速對交會壓力波的影響。
圖14表示了不同車速下,頭車交會側測點1的壓力時間歷程曲線。由圖可知:不同車速下,同一測點的壓力變化規律幾乎一樣,都呈現出明顯的“頭波、尾波”,列車速度對壓力波動規律沒有影響。列車明線交會速度越高,壓力波的各個最值越大,壓力變化越劇烈;車速對明線交會壓力波最值和變化幅度有重大影響。明線穩定運行時,處于微小的負壓狀態,車速越高,負壓也越大。
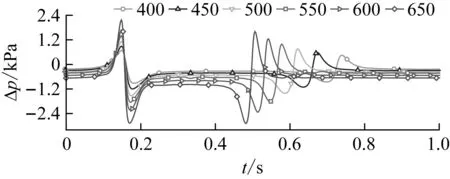
圖14 不同車速下頭車測點1壓力(km/h)Fig.14 Pressure of leading car’s point 1 under different speeds(km/h)
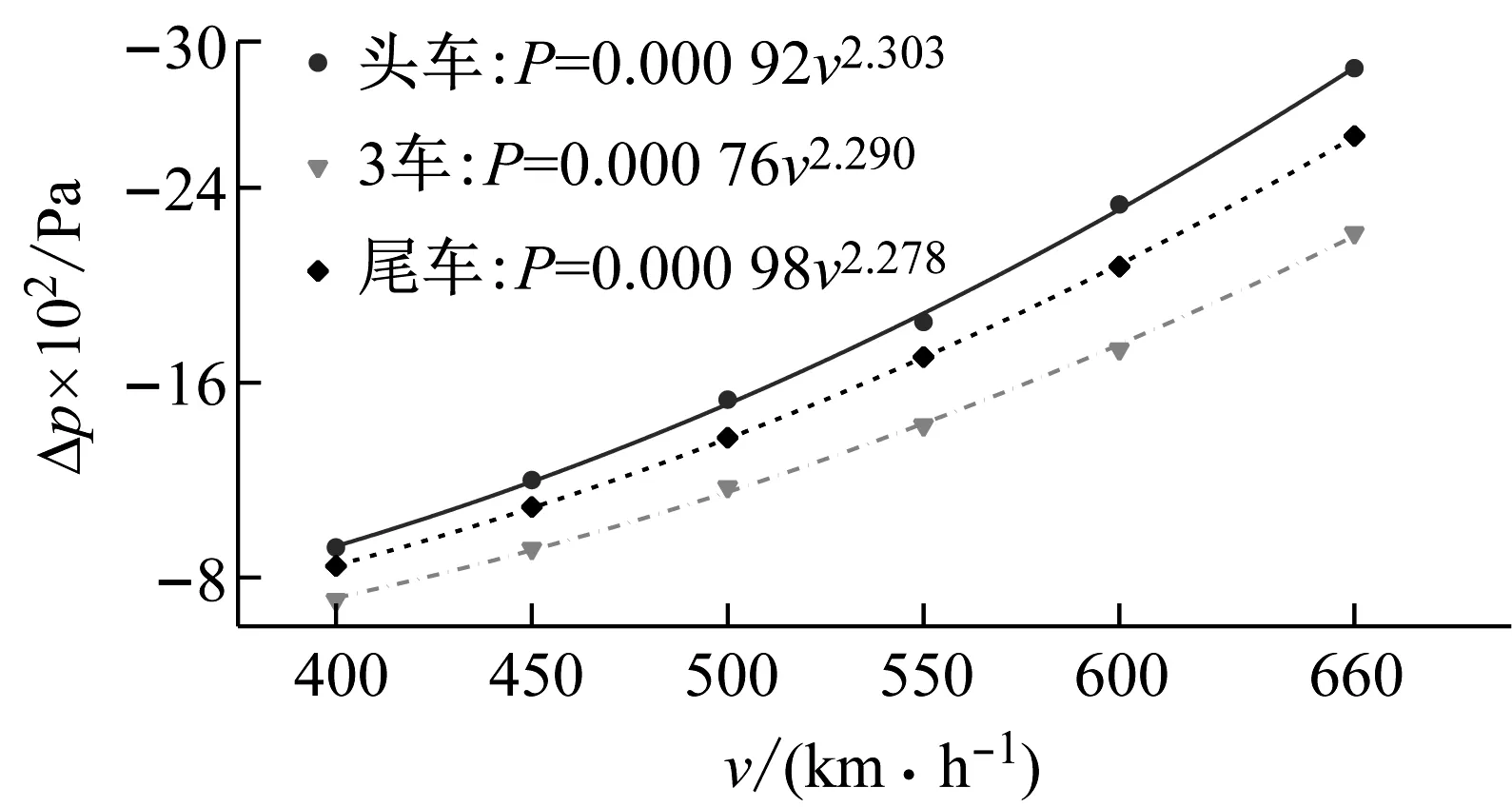
為了定量說明車速對明線交會壓力波峰值的影響,圖15表示了壓力波的最大正負壓值以及擬合關系。壓力波最大正負壓值與車速的二次方函數近似成正比關系,擬合曲線擬合效果較好。頭車壓力最大正負壓值隨車速的增長速度比其他車廂都快。
2.4 明線交會側向力
2.4.1 各節車廂側向力
圖16表示了列車明線交會時,頭車、3車和尾車的側向力時間歷程曲線(圖中黑色點劃豎線表示通過列車頭尾車鼻尖到達觀測車廂中間位置時刻,其他圖也一樣)。正的側向力表示車廂受到向外推的作用力,負的側向力表示車廂受到向內推(朝向通過列車)的作用力。圖中,將3車、尾車側向力的時間軸進行平移,將各節車廂的側向力峰值放到一起,便于對比。由圖可知:通過列車車頭通過時,觀測列車各車廂側向力快速增大到正峰值,然后快速減小到負谷值。既車頭通過時,觀測車廂受到先向外后向內的瞬變側向氣動力。車尾通過時,觀測車廂受到先向內后向外的瞬變側向氣動力,側向力的變化規律與車頭通過正好相反。車頭通過時側向力的變化幅度大于車尾通過的。明線交會時,不同車廂受到的側向力略有區別,頭車在通過列車車頭通過時,向外推力達到最大,尾車在車尾通過時,向外推力達到最大;對于向內推力,頭車在車尾通過時最大,尾車在車頭通過時最大,頭尾車正好相反。對于中間平直車廂,向外、向內推力都在車頭通過時,達到最大。
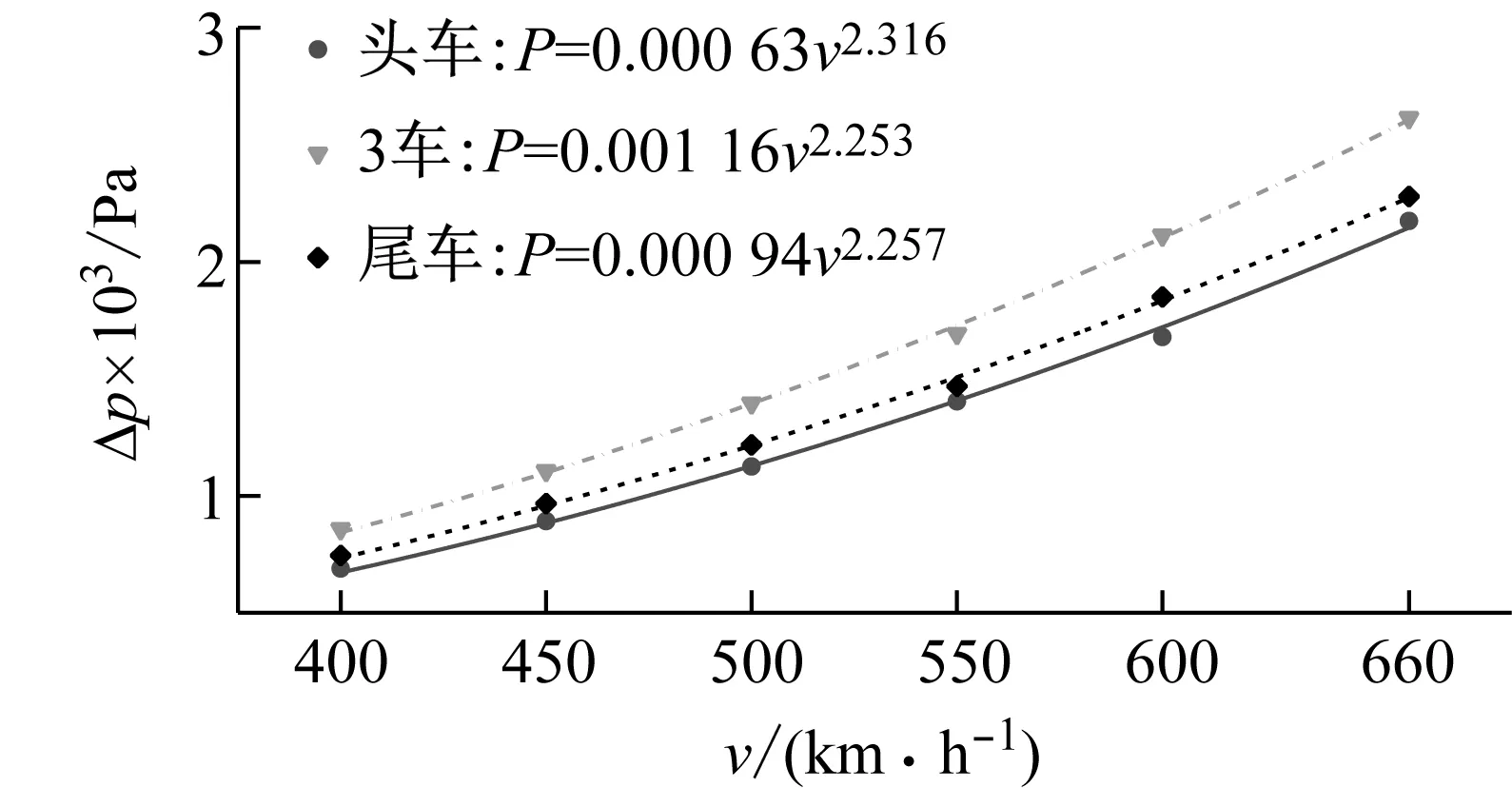
(a) 最大正值
(b) 最大負值圖15 車速對壓力峰值的影響特性Fig.15 Train speed effects on pressure peaks
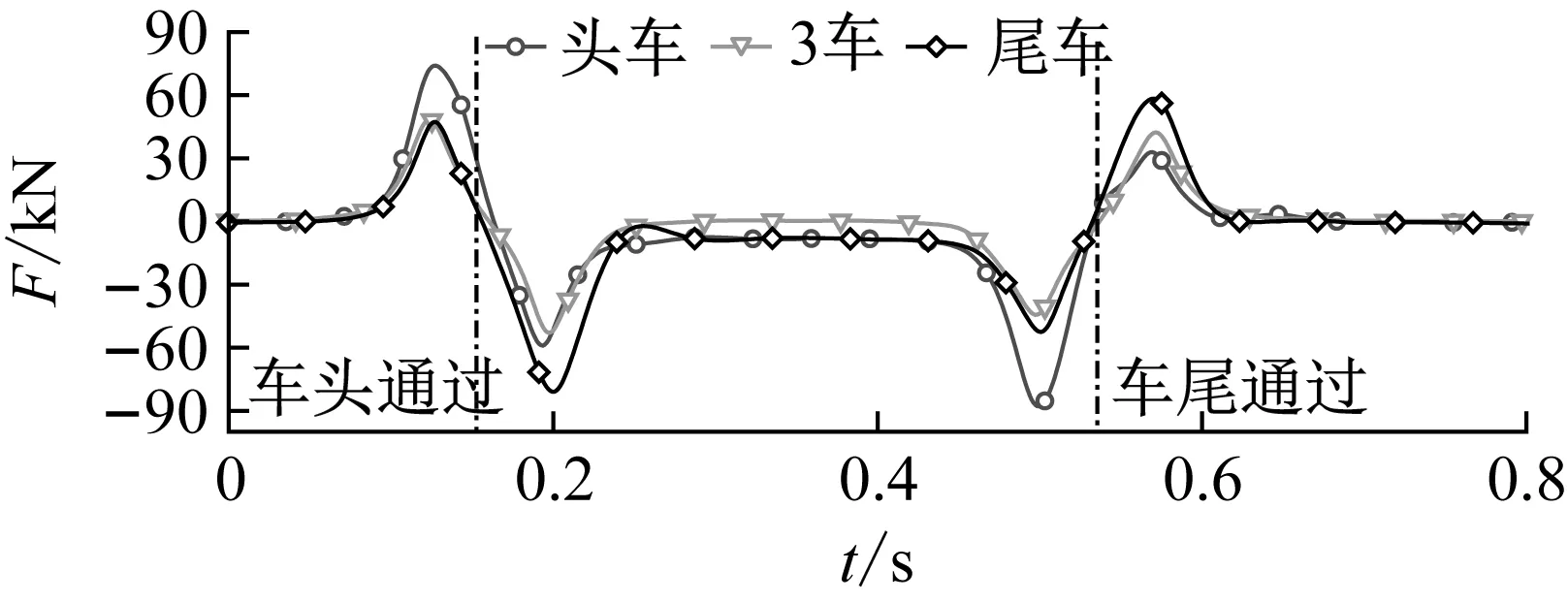
圖16 不同車廂側向力Fig.16 Lateral force of different cars
列車明線交會整個過程中,各節車廂都受到向內、向外推的兩次側向力交替作用,側向氣動力發生瞬時換向,對列車橫向阻尼和電磁導向系統形成瞬態沖擊,誘發車體發生橫向振動,引起磁浮列車導向間隙變化,最終影響運行穩定性。
表3統計了明線交會時各節車廂側向力的最值。由表可知:頭車向外、向內推的側向力都最大,尾車的次之,中間車的最小,所有中間車廂的側向力最值相差不大。既頭車的側向力最為惡劣,頭車向外推的側向力最大值為73.99 kN,向內推的最大值為87.88 kN,尾車向內推的最大值為80.98 kN。
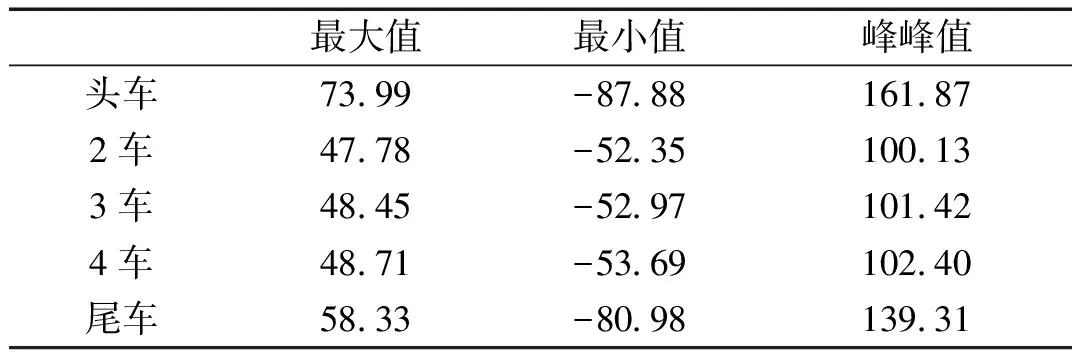
表3 各節車廂側向力最值
2.4.2 車速對側向力的影響
以400、450、500、550、600和660 km/h明線等速交會時的側向力為例,研究列車速度對側向力的影響特性。由圖16可知,不同車廂的側向力變化規律一樣,因此以頭車側向力為例,說明車速對側向力的影響特性。圖17表示了不同車速下,頭車側向力時間歷程曲線。由圖可知:列車明線交會時,不同車速下的側向力變化規律一樣,都出現正、負側向力的兩次交替作用;不同的是,速度越高,側向力的最值越大,側向力變化越劇烈,車速對側向力最值和變化幅度有重大影響。
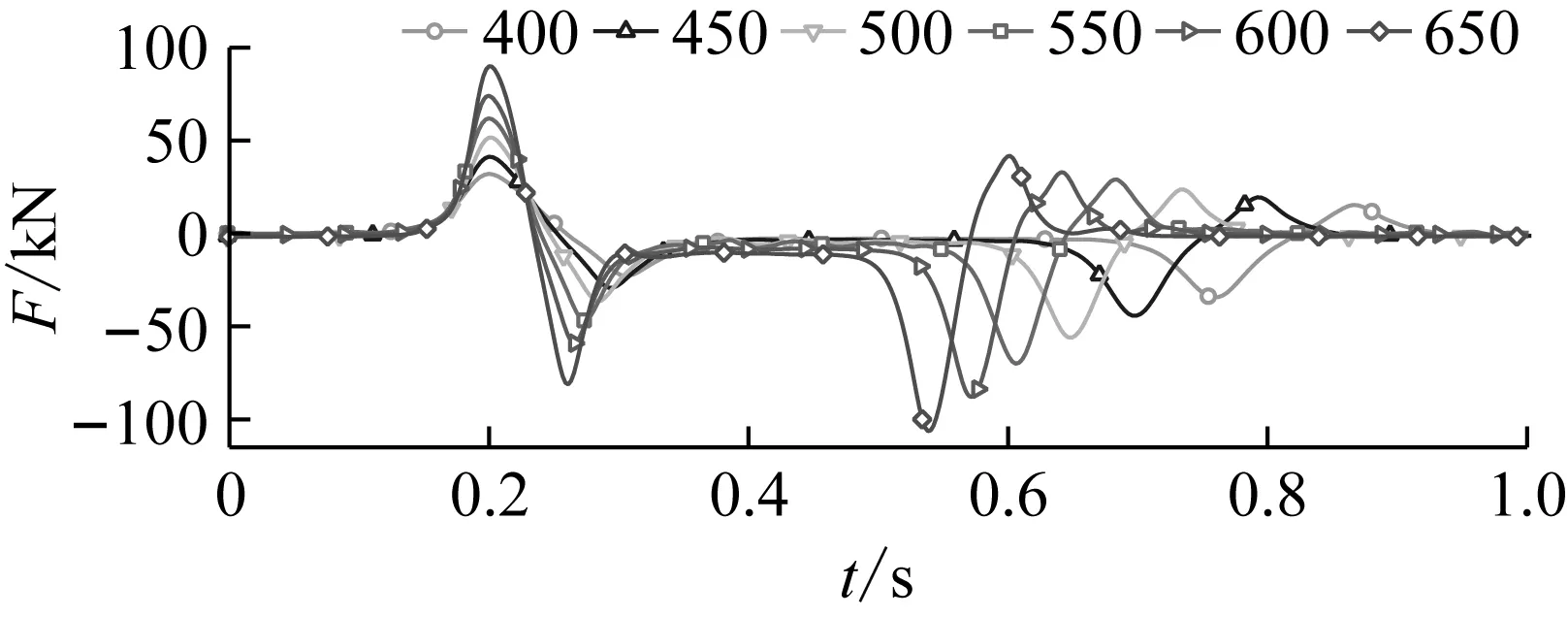
圖17 不同車速下頭車側向力(km/h)Fig.17 Lateral force of leading car under different speeds(km/h)
為了定量說明車速對明線交會側向力最值的影響,圖18表示了各車廂側向力的最大正負值以及擬合關系。側向力最大正負值與車速的二次方函數近似成正比,擬合曲線擬合效果較好。頭車側向力最大正負值隨車速的增長速度比其他車廂都快。
2.5 明線交會時的偏航力矩
圖19表示了列車明線交會時,頭車、3車和尾車偏航力矩的時間歷程曲線。正的偏航力矩使車廂前部向外擺,負的偏航力矩使車廂前部向內擺(朝向通過列車)。圖中將3車、尾車偏航力矩的時間軸進行平移,使各節車廂的偏航力矩峰值放到一起,便于對比。由圖可知:通過列車車頭經過時,觀測列車各車廂的偏航力矩先快速增大到正峰值,然后快速減小到負谷值,最后又快速增大到正峰值。既車頭通過時,觀測列車各車廂先向外擺,再向內擺,之后又向外擺;尾車通過時,正好相反。車頭通過時,偏航力矩的變化幅度比車尾通過時大。
明線交會時,頭車或尾車經過時,在極短的時間內,觀測列車各車廂都經歷了偏航力矩兩次瞬時換向,整個交會過程中,每節車廂都經歷了偏航力矩的四次換向,偏航力矩的這種變化可能造成列車運行中短時的橫向極不穩定,并對列車的側擺阻尼造成較大的瞬態沖擊,對電磁導向系統會有更高的要求。由于車頭和車尾兩端沒有縱向車鉤力的約束,偏航力矩的影響更加嚴重,嚴重時會引起頭尾車橫向穩定性失穩和“蛇行運動”。對于中間車,由于車廂兩端受到縱向車鉤力的約束,偏航力矩的影響相對較小。
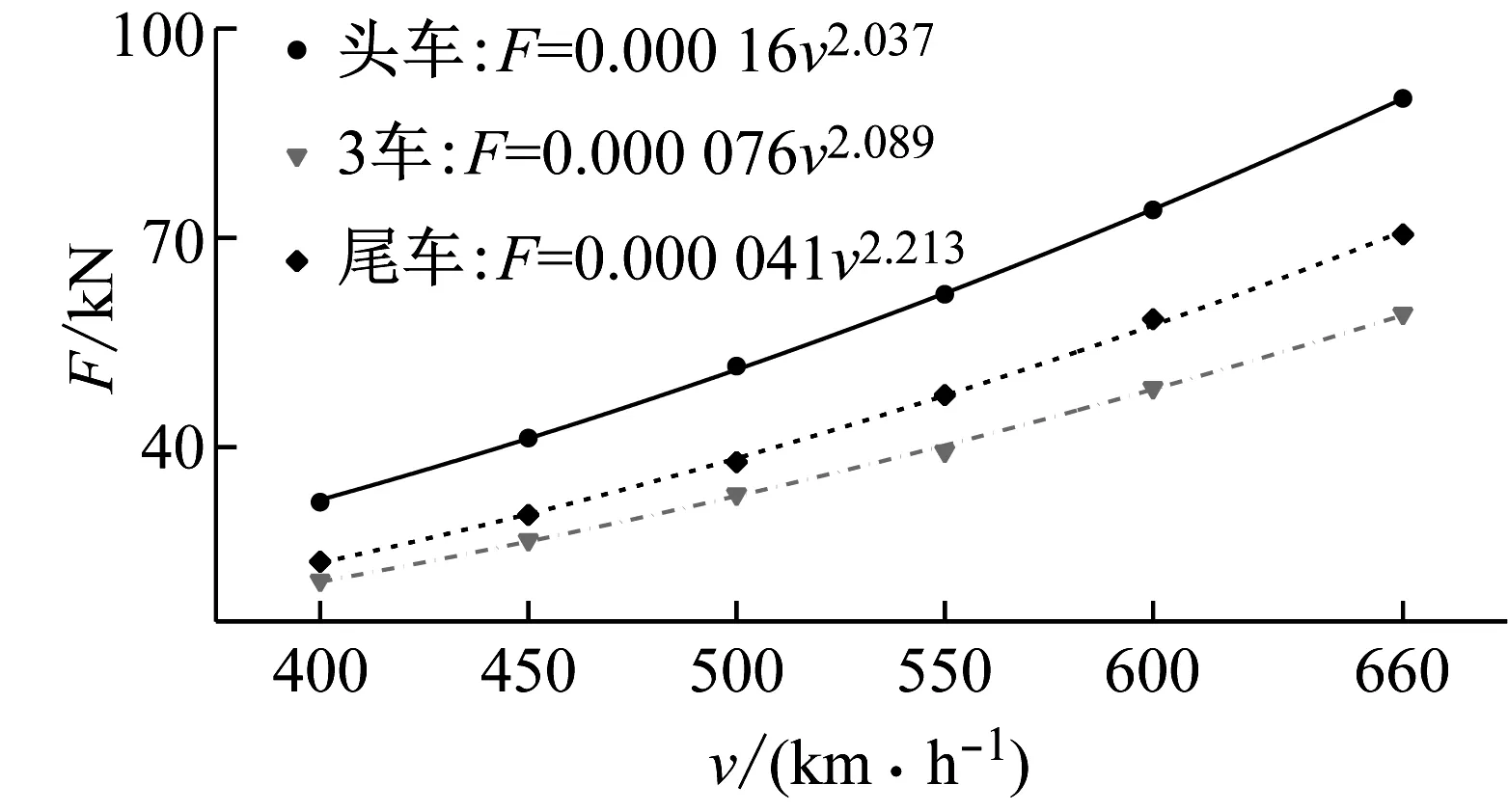
(a) 最大正值
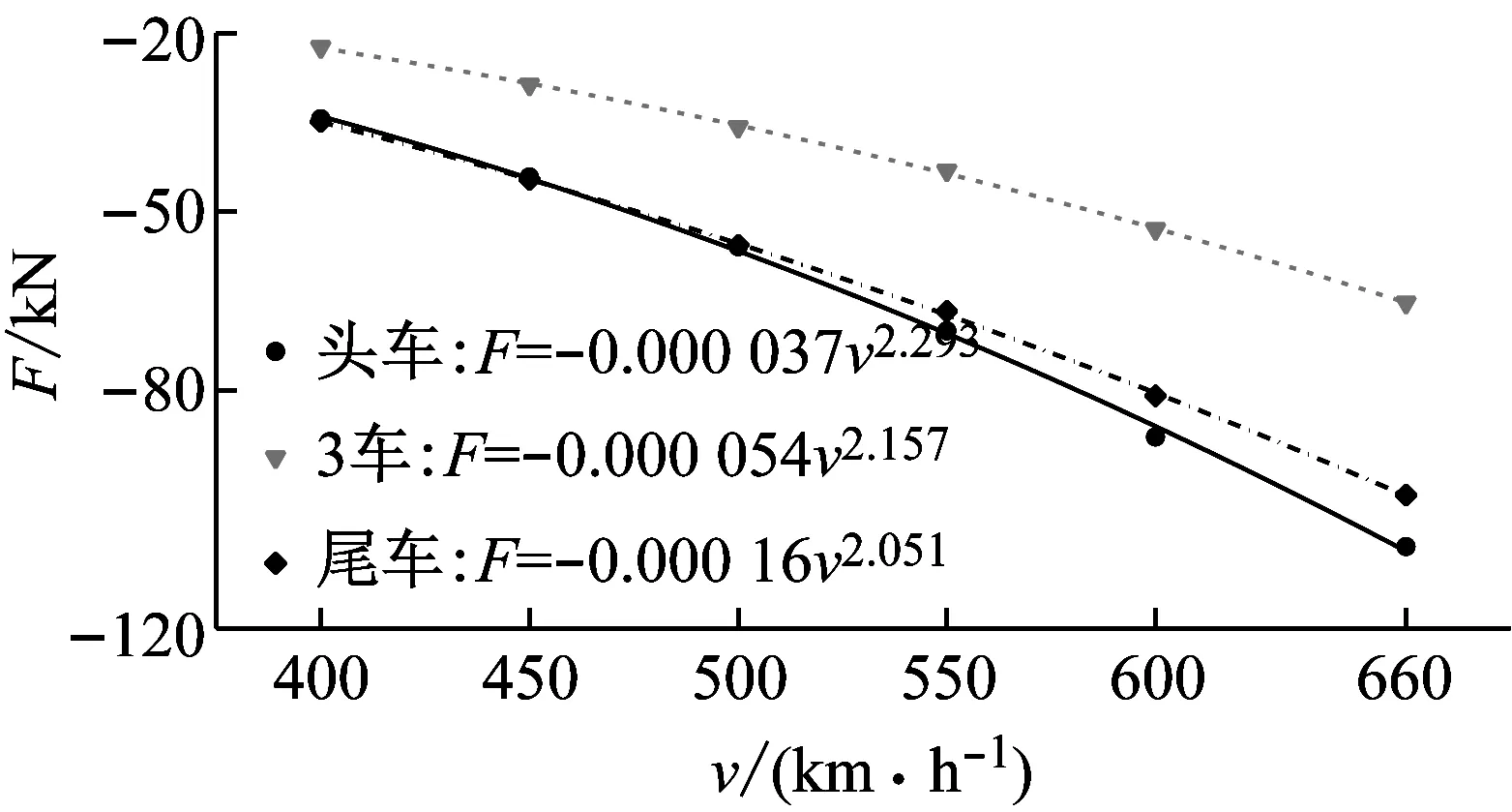
(b) 最大負值圖18 車速對側向力最值的影響特性Fig.18 Train speed effects on lateral force peaks
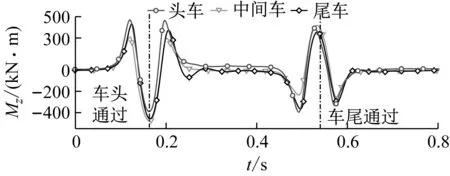
圖19 不同車廂偏航力矩Fig.19 Yaw moment of different cars
表4統計了明線交會時各節車廂偏航力矩的最值。由表可知:頭車向外擺的最大力矩明顯大于其他車廂的,向內擺的最大力矩明顯小于其他車廂的。所有中間平直車廂的力矩相差不大。頭車向外擺的最大力矩為469.06 kN·m,尾車向內擺的最大力矩為458.38 kN·m。
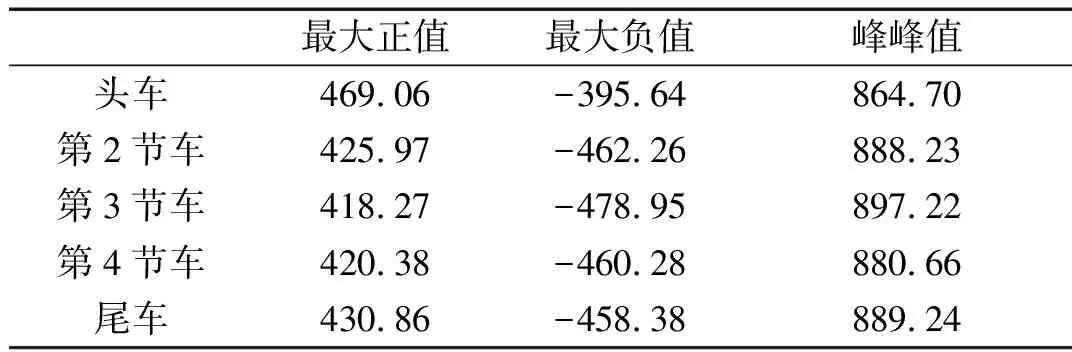
表4 各節車廂偏航力矩最值
2.6 明線交會時的側滾力矩
圖20表示了列車明線交會時,頭車、3車和尾車側滾力矩的時間歷程曲線。正的側滾力矩表示車廂有向外翻到的趨勢,負的側滾力矩表示車廂有向內翻到(朝向通過列車)的趨勢。圖中將3車、尾車側滾力矩的時間軸進行平移,使各節車廂的側滾力矩峰值放到一起,便于對比。由圖20可知:通過列車車頭通過時,觀測列車各車廂側滾力矩快速增大到正峰值,然后快速減小到負谷值。既車頭通過時,觀測車廂受到先向外后向內的瞬變側滾力矩。車尾通過時,觀測車廂受到先向內后向外的瞬變側滾力矩,側滾力矩的變化規律與車頭通過時正好相反。車頭通過時側滾力矩的變化幅度大于車尾通過的。明線交會時,不同車廂受到的側滾力矩略有區別,通過列車車頭通過時,頭車向外翻的側滾力矩達到最大,車尾通過時,尾車向外翻的側滾力矩達到最大;對于向內翻的側滾力矩,頭車在車尾通過時達到最大,尾車在車頭通過時達到最大,頭尾車正好相反。對于中間平直車廂,向外、向內翻的側滾矩都在車頭通過時,達到最大。
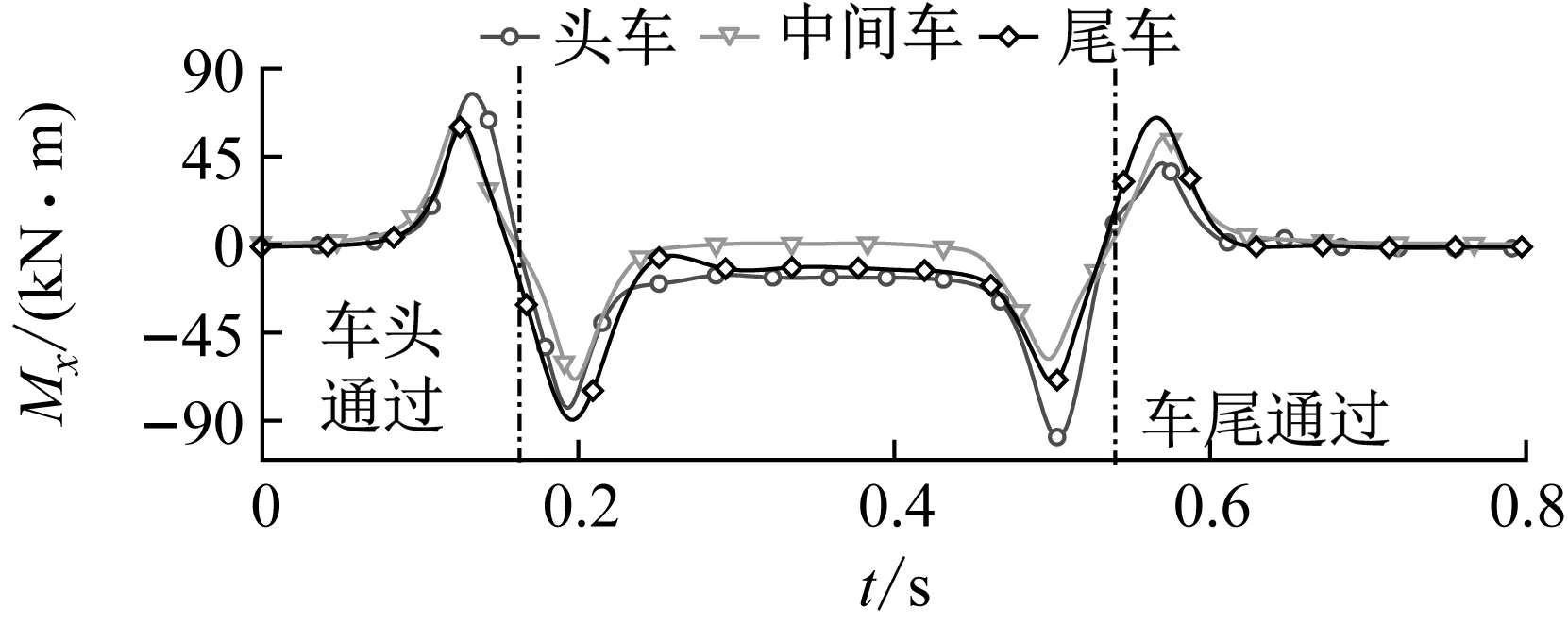
圖20 不同車廂側滾力矩Fig.20 Roll moment of different cars
明線交會時,在極短的時間內,各節車廂都受到正、負側滾力矩的兩次交替作用。側滾力矩的劇烈瞬變對列車側滾阻尼或防側滾穩定器形成較大的瞬態沖擊,對懸掛系統和電磁懸浮系統等提出更高的要求。側滾力矩的瞬變導致車體發生側滾運動,進而會引起磁浮列車懸浮間隙發生變化,最終影響磁浮列車的運行穩定性和安全性。
表5統計了明線交會時各節車廂側滾力矩的最值。由表可知:頭車向外翻和向內翻的側滾力矩都最大,尾車的次之,中間車的最小,所有中間車廂的側滾力矩最值相差不大。頭車向外翻的側滾力矩最大值為77.21 kN·m,向內翻的最大值為98.34 kN·m;尾車向內翻的最大值為89.51 kN·m。
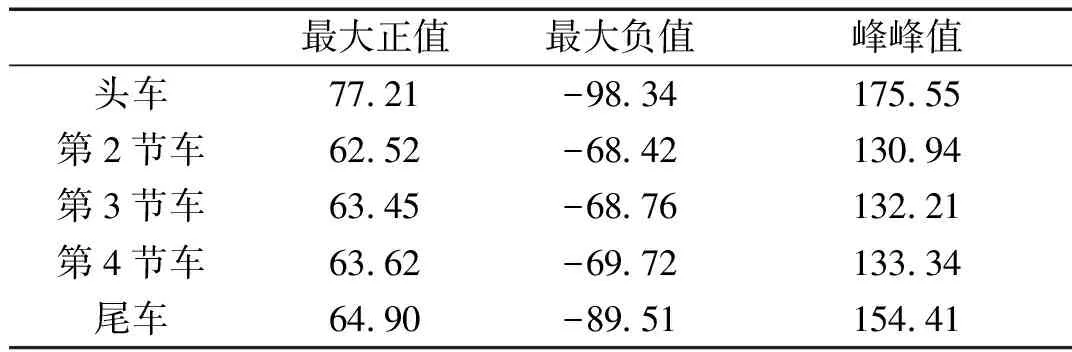
表5 各節車廂側滾力矩最值
2.7 交會側壓力與氣動力的作用關系
圖21表示了磁浮列車明線交會時,不同車廂交會側測點1的壓力、側向力、側滾和偏航力矩的時間歷程曲線。由圖21可知:磁浮列車明線交會整個過程中,當車頭通過時,觀測列車各車廂的觀測點壓力、側向力和側滾力矩都呈現先正后負的波動趨勢;偏航力矩先正后負,再正的波動趨勢。車尾通過時的變化規律與車頭通過時的正好相反。這主要是因為列車明線交會時,受通過列車車頭鼻尖正壓區、流線段負壓區,以及車尾流線段負壓區、鼻尖正壓區的相繼作用,使交會側壓力發生“穩定狀態—增大—減小—穩定狀態—減小—增大—穩定狀態”的變化,導致各節車氣動力產生相應的變化。明線交會整個過程中,交會側壓力與各節車側向力、側滾力矩和偏航力矩存在對應關系,交會側壓力對三個氣動力有重大影響,對其變化其主導作用。
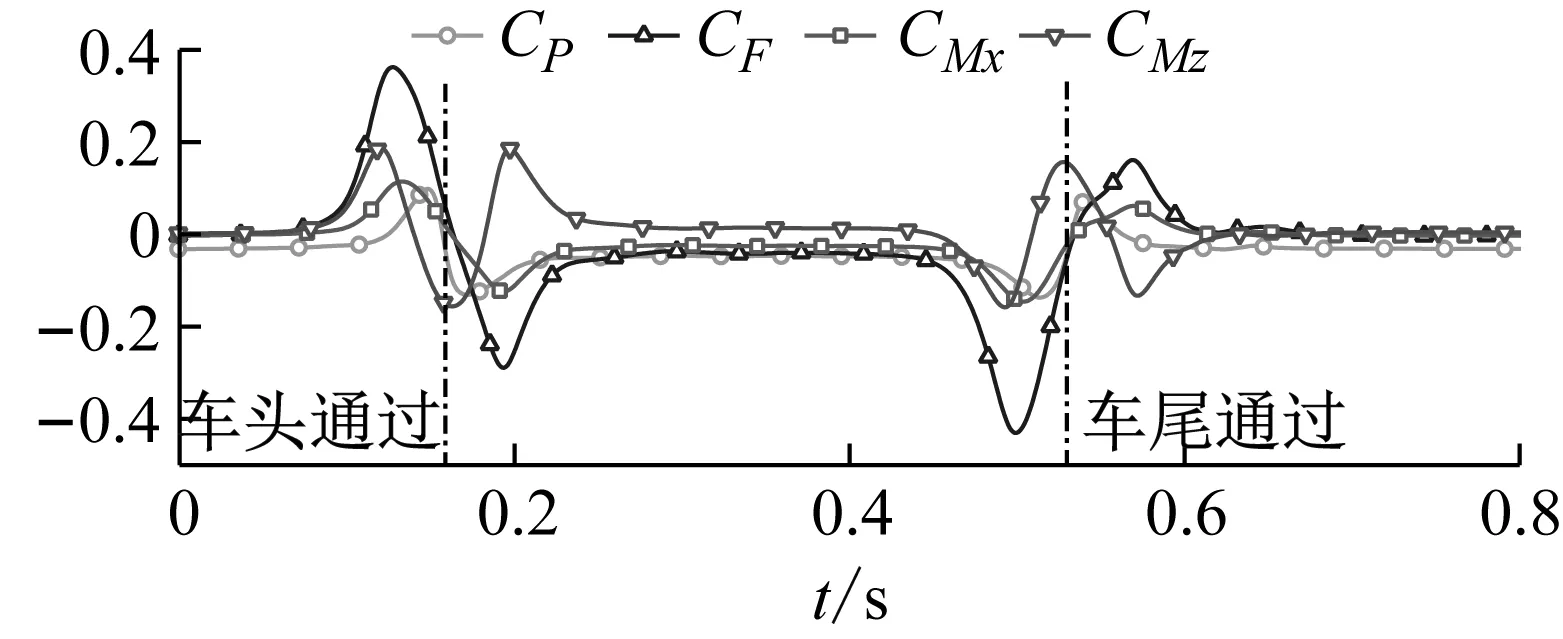
(a) 頭車
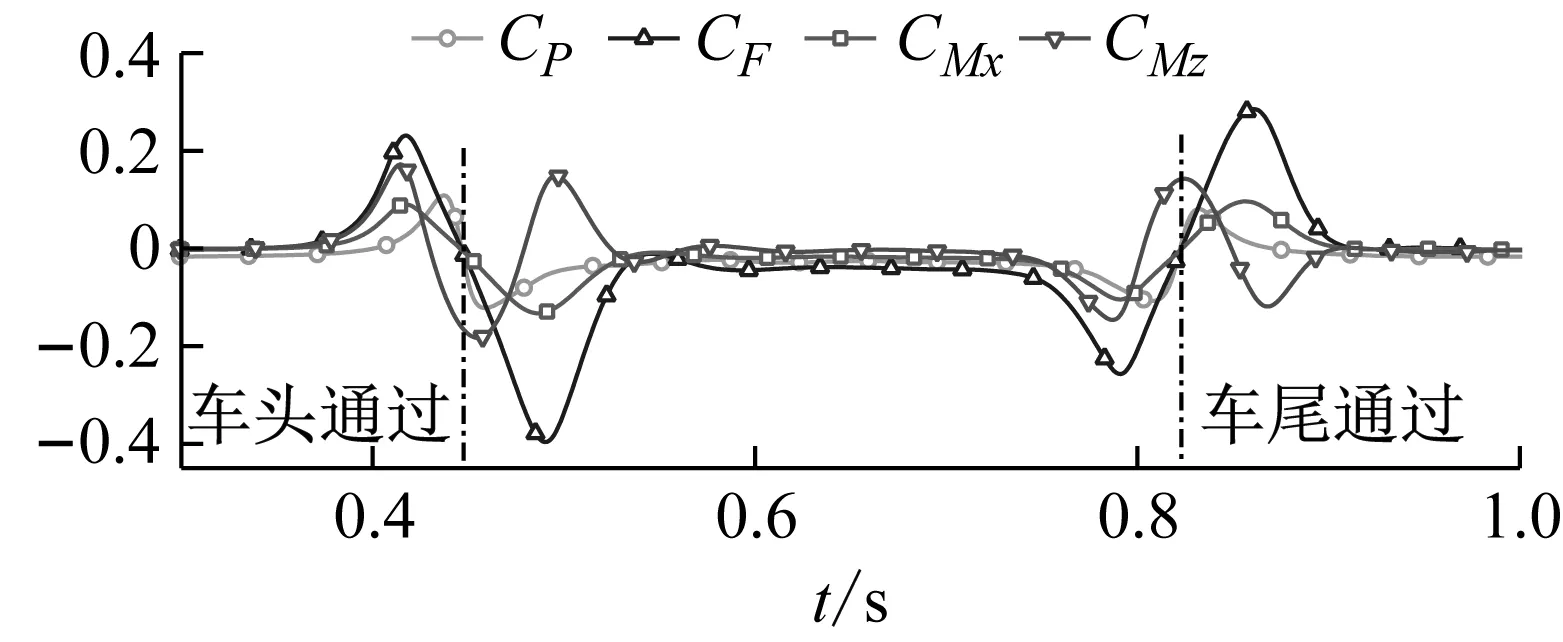
(c) 尾車圖21 各節車交會側壓力、側向力、側滾力矩和偏航力矩Fig.21 The pressure, lateral force, rolling moment and yaw moment of different cars’
由于交會側壓力對列車橫向氣動性能起主導作用,而觀測列車交會側壓力波動主要是由通過列車表面壓力所引起的。600 km/h高速磁浮列車頭尾車鼻尖與設備艙過渡區域的正壓較強,設備艙導流區域與車體側墻拐角區域的負壓較強,如圖22所示。導致明線交會時,受該區域壓力的作用,交會側壓力發生劇烈波動,最終引起各個氣動力發生劇烈變化。為了減緩明線交會時車體的橫向擺動和側滾運動,應降低該區域的壓力波動,從空氣動力學角度出發,可考慮將鼻尖與設備艙過渡區域、設備艙前端導流區域與列車側墻拐角區域進行平順化設計。
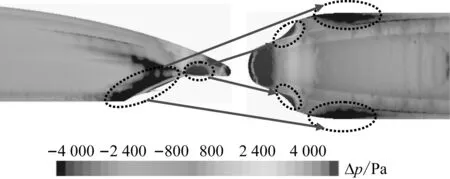
圖22 流線段壓力分布Fig.22 Pressure contour of stream line zone
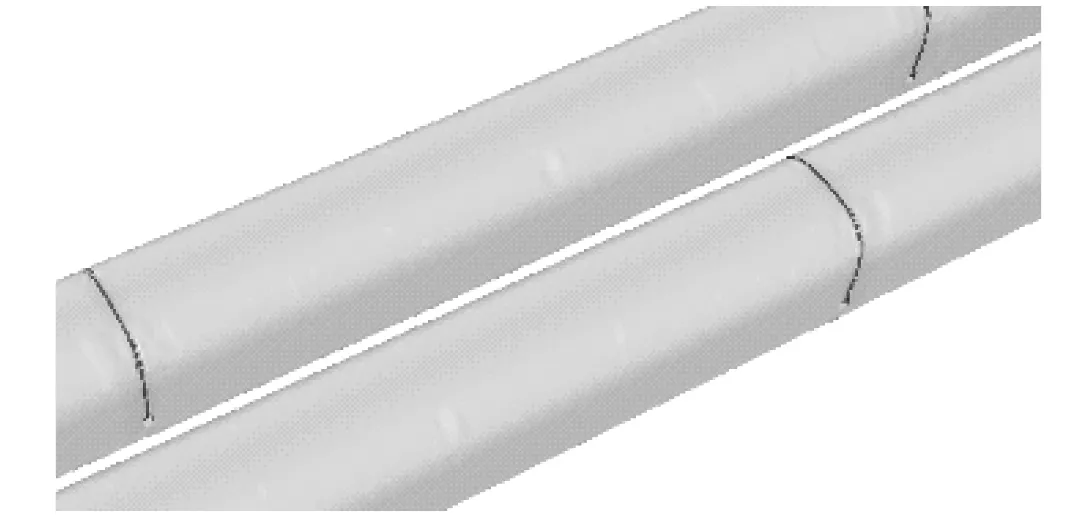
根據側滾力矩計算公式[26],側滾力矩主要由側向力和升力引起,車底壓力分布特性對列車氣動升力有重大影響。圖23給出了列車明線交會過程中,車頭通過平直車身時,車體底部的壓力分布特性。從圖中可以看出,明線交會時,交會側壓力受通過列車表面壓力的影響很大。頭尾車流線段的正負壓區通過時,引起觀測列車車體底部交會側的壓力產生相應的正負壓力波動;由于T型軌道梁對空氣橫向流動的限制作用,非交會側車體底部的壓力幾乎沒有波動。車體底部兩側的這種壓力分布不均勻性導致使軌道兩側的車底氣動升力相差較大,在氣動側向力的聯合作用下,磁浮列車極容易發生傾覆事故。而且軌道兩側升力的不平衡性,對懸浮電磁力設置造成一定困難。

圖23 列車底部壓力Fig.23 Pressure contour of train bottom
3 結 論
采用三維數值模擬方法,對我國600 km/h高速磁浮列車明線交會橫向氣動性能進行研究,得出主要結論如下:
(1) 明線交會時,車體橫向擺動和側滾運動主要是由通過列車表面壓力分布特性所引起的,特別是頭尾車流線段的正負壓。T型軌道梁對底部空氣橫向流動的限制作用,導致觀測列車車體底部兩側壓力分布不均勻,最終加劇了列車的側翻運動。
(2) 明線交會時,車頭通過觀測列車時,側向力和側滾力矩都呈現出先正后負的波動趨勢,偏航力矩呈現出先正后負,再正的波動趨勢;車尾通過時變化規律正好相反。交會側壓力對側向力、側滾力矩和偏航力矩的變化其主導作用。
(3) 明線交會時,頭車氣動力的變化幅度比其他車廂都大,氣動性能最為惡劣。以600 km/h等速交會時,頭車側向力向外推的最大值為73.99 kN,向內推的最大值為87.88 kN,向外擺的最大偏航力矩為469.06 kN·m,向內翻的最大側滾力矩為98.34 kN·m。明線交會壓力波和側向力最值與車速的平方近似成正比關系。
(4) 為減緩明線交會時列車的橫向擺動和側滾運動,可考慮將鼻尖與設備艙過渡區域、設備艙導流區域與車體側墻的拐角區域進行平順化設計。
