城市軌道混合動力接觸網作業車研制
2022-01-25 04:11:12李連凱
技術與市場 2022年1期
關鍵詞:作業
唐 培,劉 軍,李連凱
(中車資陽機車有限公司產品研發中心, 四川 資陽 641300)
0 引言
接觸網作業車主要用于城市軌道接觸網架線、冷滑、檢修作業。在架線作業時,機車牽引平板車及線圈恒低速行走,方便工作人員架線作業。架線完成后,需要對接觸網進行冷滑檢查,此時接觸網不帶電,受電弓升起與接觸網接觸,作業車以最高60 km/h的速度運行,檢查受電弓與接觸網的接觸狀態。城市軌道交通的快速發展及環保要求對接觸網作業車提出新的要求,目前接觸網作業車主要為內燃液力傳動[1-2],其廢氣及噪音對施工人員危害嚴重,基于此,設計了一款新型環保性接觸網作業車,采用混合動力以及新技術,改善了司乘及工作人員工作環境,實現了精準定距停車、坡道停車、零速鎖定、低恒速控制等功能。
1 機車方案
1.1 主要技術參數
作業車采用磷酸鐵鋰動力電池和柴油發電機組作為混合動力源,電池裝電量300 kW·h,柴油發電機組裝車功率80 kW。機車主要技術參數如表1所示。
1.2 總體布置
機車總體布置(見圖1),主要由司機室、車體、走行部、制動系統、電氣系統、動力電池、柴油發電機組和升降平臺組成。
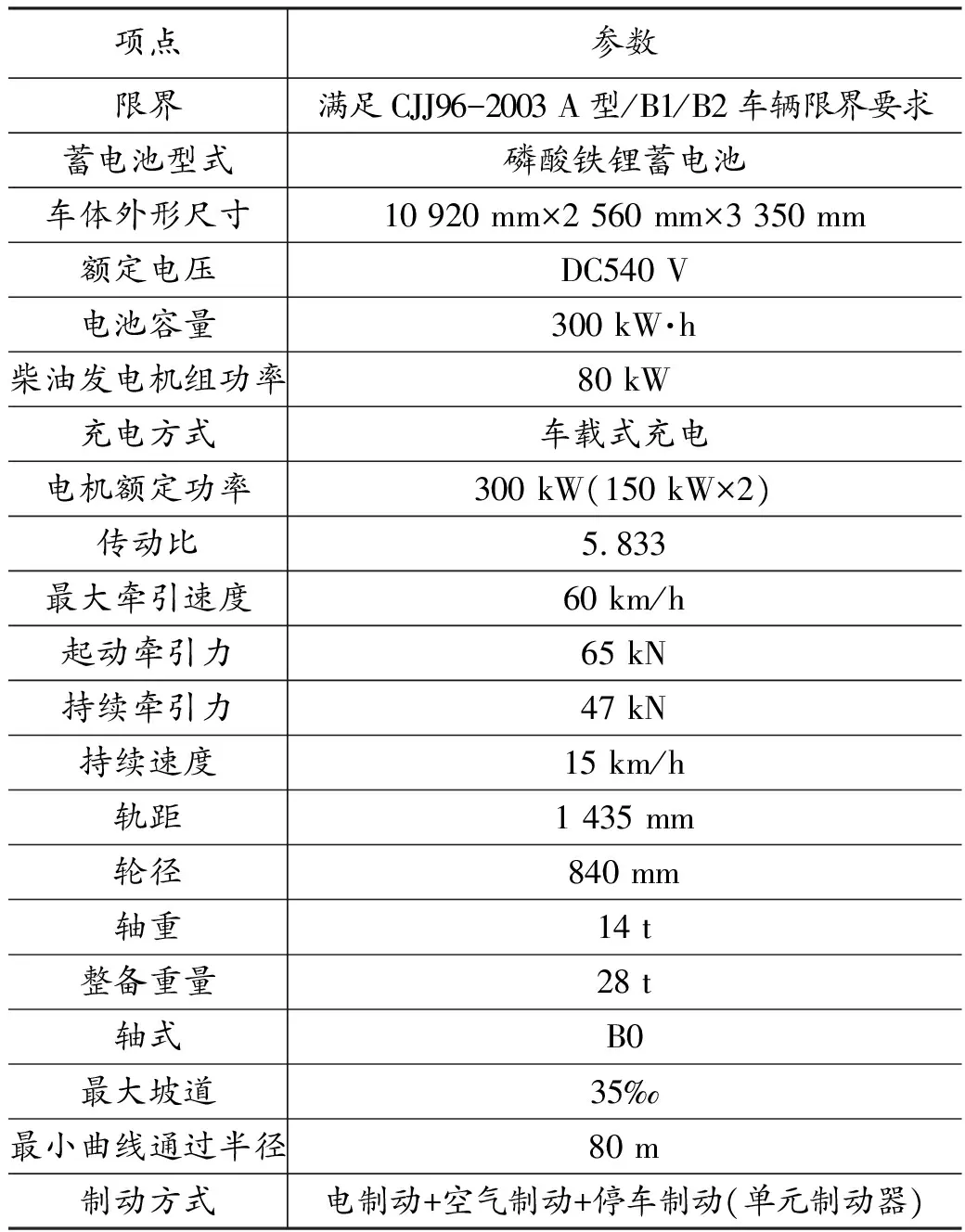
表1 機車主要技術參數
1.3 司機室
司機室布置在車體的一端,司機室入口處布置有一扇門(見圖2)。室內兩端分別布置有2個操縱臺,操縱臺互鎖以防止誤操作。機車主變頻器、輔助變頻器及充電機集成為一體,布置在操縱臺副司機位下方,整個司機室寬敞大方,室內無其他任何電器柜體。整個變頻模塊共有8個冷卻風扇,分為2個獨立區。2個獨立區分別從機車前臉和車下進風,從機車側墻排放。前臉進風口和側墻出風口均采用45°斜角防雨及膠條防雨措施。為進一步保證防水效果,風道內部僅為散熱片,電氣元件在風道上層通過散熱片進行散熱。
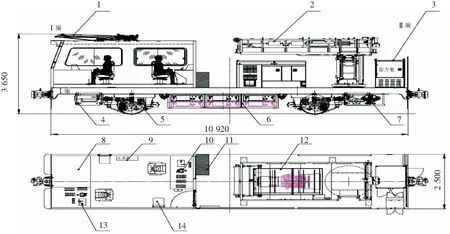
1—受電弓;2—升降平臺;3—動力柜;4—牽引電機;5—輪對驅動裝置;6—動力電池;7—空壓機;8—主輔一體柜;9—工具柜;10—操縱臺1;11—空調外機;12—柴油發電機組;13—操縱臺2;14—添乘座椅。
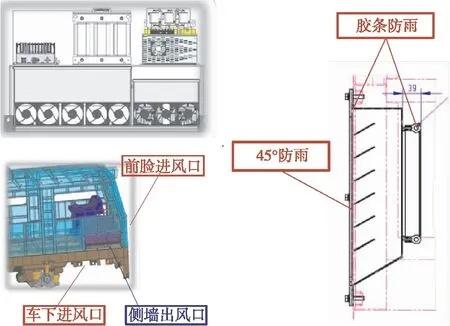
圖2 司機室布置示意圖
1.4 動力系統
動力系統由動力蓄電池和柴油發電機組組成。動力蓄電池懸掛于車架下方,柴油發電機組布置在車架上方。
動力蓄電池為磷酸鐵鋰電池,采用雙支路,每支路由6箱電池串聯組成540 V/277 A·h電池組,單箱電池組由1并25串單體電池組成。為提高動力電池安全度和可靠性,有必要增加動力電池冗余保護[3]。動力電池箱內設置防爆、泄壓結構,電池內壓力達到一定壓力時,泄壓閥會自動開啟。除此之外,動力電池系統還配置防火抑滅系統,能夠實時監控電池系統出現的煙霧及微火花情況并自動噴發滅火裝置;操縱臺上布置有手動滅火開關,也可手動噴發滅火裝置。
柴油發電機組為靜音式機組,機組功率為80 kW,自帶油底殼容積160 L。柴油發電機組上設置有“手動-自動”轉換開關,當置于“手動位”時,柴油機只能通過手動開啟和關停。當置于“自動位”時,柴油機可根據機車工況及動力電池狀態自動啟停。
1.5 傳動系統
機車采用交流電機驅動,傳動系統主要包括牽引電機、萬向軸和車軸齒輪箱(見圖3)。牽引電機采用防脫落結構懸掛于車架下方,牽引電機安裝位置高。在接觸網施工階段,隧道內可能存在一定的積水,抬高牽引電機安裝位置有利于機車涉水運行。
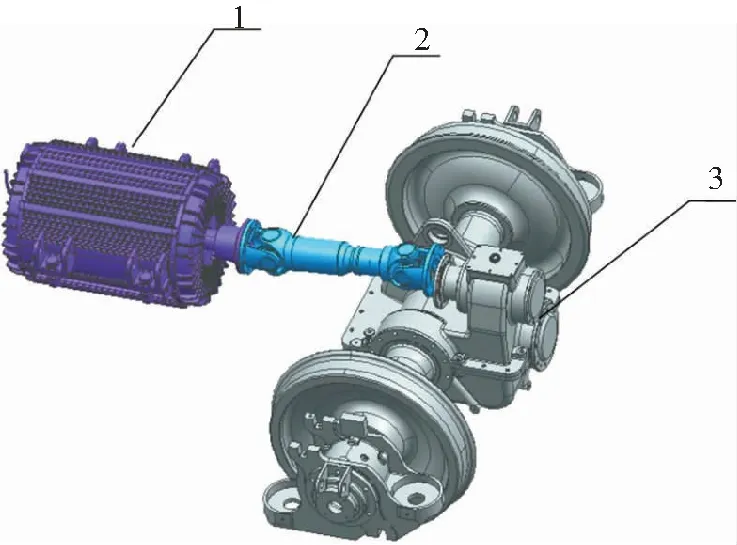
1—牽引電機;2—萬向軸;3—車軸齒輪箱。
由于接觸網作業車在架線作業時需要長時間進行0~5 km/h的低恒速運行,對車軸齒輪箱的潤滑系統要求非常嚴苛。本車車軸齒輪箱除了常規飛濺潤滑以外,增加了強迫潤滑。潤滑油通過三路,分別潤滑車軸齒輪箱的各個部分,以滿足機車長時間低速運行的需要。
1.6 電氣系統
機車主電路由動力電池箱、柴油發電機組、牽引變流柜、高壓箱、2個牽引電機組成(見圖4)。動力電池通過高壓箱向中間直流回路供電,并通過牽引逆變器向牽引電機供電,控制機車運行,牽引電機采用軸控方式。柴油發電機組或地面電源通過整流升壓模塊向中間直流回路供電,柴油發電機組或地面電源供電時通過接觸器互鎖,通過DC/DC模塊控制充電電壓及充電電流,地面電源向動力蓄電池充電時機車不能行車。機車牽引運行時,牽引控制器根據司控器檔位,輸出相應檔位對應的速度(/轉矩)信號給逆變器,逆變器根據控制指令,采用閉環矢量控制方式,控制牽引電機輸出扭矩,進而控制機車牽引運行。
機車再生制動回饋時,牽引控制器根據司控器制動檔位,輸出相對應的制動速度(轉矩)信號給逆變器,逆變器根據控制指令,控制牽引電機實施再生制動,精確控制牽引電機的制動轉矩,同時控制回饋電流。
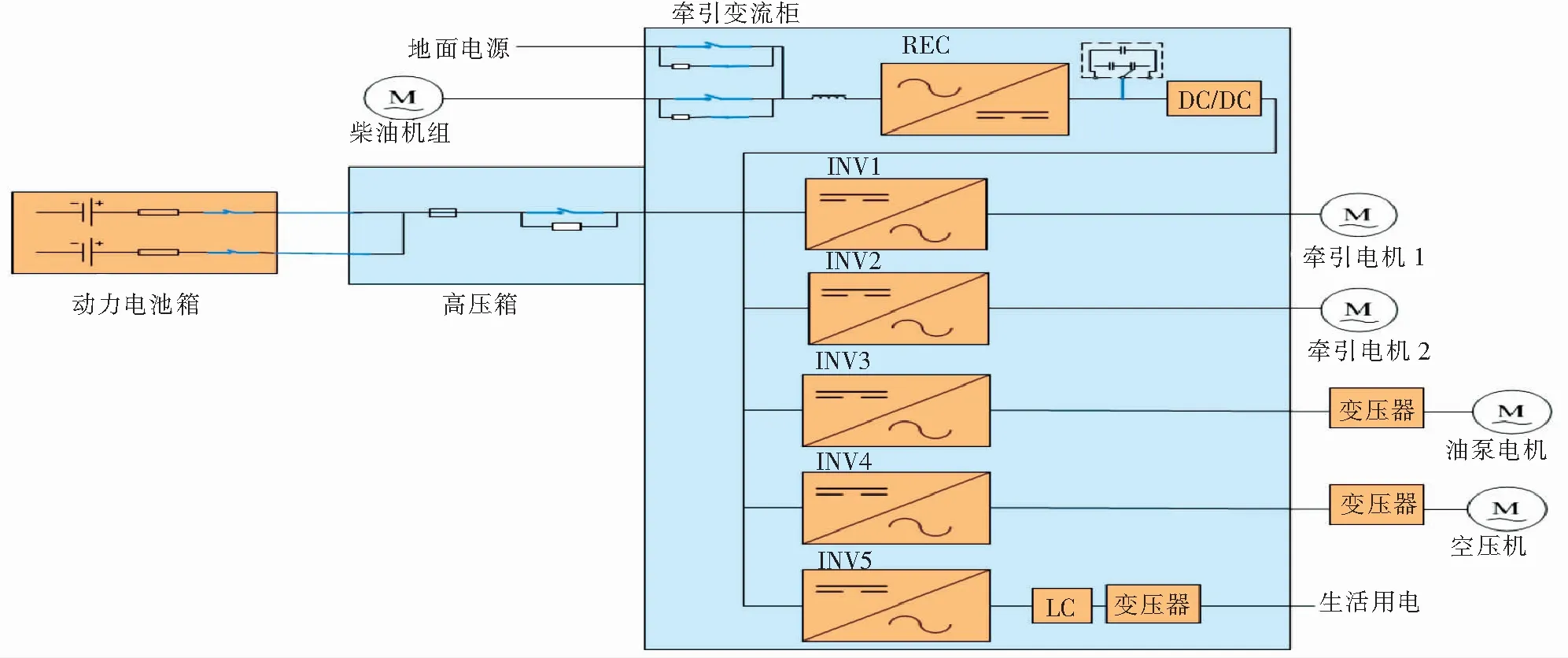
圖4 機車主拓撲圖
2 機車特點
機車采用靈活的混合動力控制策略,根據動力電池狀態、機車工況自動調整動力輸出,可最大程度實現動力性與經濟性。針對接觸網作業車的特殊作業工況,機車具有零速鎖定、精準定距停車、恒低速控制等功能。
2.1 機車混合動力策略
為提升機車經濟性和環保性,機車在正常作業情況下均采用純動力電池輸出。當電池電量低于40%時,此時柴油發電機組自動啟動,動力輸出切換到柴油發電機組優先輸出。當需求功率小于柴油發電機組額定功率時,柴油發電機組剩余功率為動力電池充電,電量恢復到95%以上時自動切換回動力電池優先輸出。當需求功率大于柴油發電機組額定功率時,多余的功率由動力電池自動補充,如圖5所示。
2.2 定距停車
接觸網作業車在架線打孔時,往往需要精確走行固定的距離。目前城軌列車ATO系統主要通過線路預設的定標點來實現精確停車[4],而接觸網作業車在施工作業時并無定標點且其定距行走的距離比較靈活,現有方式無法滿足施工精確停車的需求。
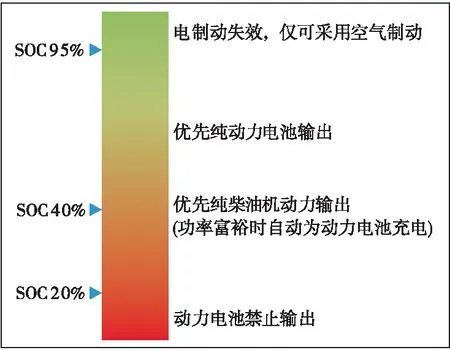
圖5 機車動力策略
本機車牽引電機具有較高的采樣精度,單圈4 096個脈沖信號,電機可根據脈沖進行精準控制。機車走行1 m時的脈沖數為:
(1)
其中:i為機車傳動比;d為機車輪徑(mm)。
當機車工況萬轉開關置于“定距行車”工況時,輸入指定運行速度和行走距離,機車即可根據需要精確行車。當輸入的走行距離小于指定運行速度的加速和減速距離時,為保證精確距離停車,機車會在到達指定運行速度前自動進入減速狀態。機車定距走行試驗結果如表2所示。

表2 機車定距走行試驗結果
2.3 零速鎖定功能
接觸網作業車在施工時頻繁短時停車、啟動,傳統內燃液傳機車需要帶閘啟動,且根據司機的熟練度不同,往往存在一定的短時下滑溜車現象,有一定的行車風險。本機車具有零速鎖定功能,即在坡道上通過純電制動實現制動到零,并在短時間內保持制動狀態的功能。經試驗臺測試,牽引電機散熱滿足堵轉峰值扭矩維持10 min的散熱需求。為保證電機使用性能,機車設置允許零速鎖定的時間為2 min。坡起時,將機車工況萬轉開關置于“坡道起步”位,零速鎖定功能啟動,2 min足夠司機啟動機車并順暢運行,機車起動更加平穩安全。
2.4 恒低速控制
接觸網架線時,機車需要一直低速運行,在低速運行的同時升降平臺上方工作人員同時架線施工。架線施工要求司機以1~2 km的速度慢速運行,現有的低速運行更加平穩,便于升降平臺上方施工人員操作。現有的內燃液傳機車低恒速控制采用比例變量泵和比例變量馬達來實現低恒速,多為“2泵4馬達”或“4泵4馬達”[5],系統結構復雜。Jiang S等人采用Fuzzy+PID實現機車速度精確控制[6]。李亮等人以PID策略實現汽車牽引力控制[7]。本機車采用PID機車恒速控制技術,可實現機車無級恒速控制,通過試驗確定了最優P值和I值,使得機車恒速運行平穩無沖擊,試驗速度波動誤差在1%~2%。
2.5 經濟環保
根據HXN6機車實際運用數據顯示,混合動力機車可降低燃油消耗率30%左右[8]。根據Cipek M等的研究表明,從長期投資來看,混合動力機車投入所獲得的回報可達3倍以上[9]。經試驗驗證,本機車蓄電池動力時司機室最大噪音為60 dB,混合動力模式時司機室最大噪音63 dB,遠低于標準[10]要求的75 dB。
3 結語
隨著城市軌道交通的快速發展,接觸網作業車在建設和維護施工中都將發揮越來越大的作用。混合動力接觸網作業車采用混合動力相關技術,提高了機車的經濟性及環保性;采用精確電機控制,實現了精準定距停車、低恒速控制、零速鎖定等功能,提高了機車作業穩定性和可靠性,降低了司機的操作疲勞。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
