高速重載液壓運(yùn)動(dòng)平臺(tái)設(shè)計(jì)及驅(qū)動(dòng)特性分析
2022-01-21 09:45:34李維嘉何宇航
機(jī)電設(shè)備 2021年6期
關(guān)鍵詞:系統(tǒng)
譚 潔,李維嘉,何宇航
(華中科技大學(xué) 船舶與海洋工程學(xué)院,武漢 430074)
0 引言
6自由度并聯(lián)機(jī)構(gòu)能模擬剛體在笛卡爾空間中的任意運(yùn)動(dòng),被廣泛運(yùn)用于運(yùn)動(dòng)模擬器、減震器和定位儀等6自由度運(yùn)動(dòng)裝置中[1]。其中有6條球副滑移副(S-Spherical Joint P-Prismatic Joint,SPS)運(yùn)動(dòng)支鏈的STEWART平臺(tái)是最經(jīng)典的6-6型機(jī)構(gòu),具有剛度大[2],承載能力強(qiáng)、可控性能高等優(yōu)良特點(diǎn),應(yīng)用最為廣泛。
現(xiàn)有STEWART平臺(tái)的有效載荷一般低于20 t、運(yùn)動(dòng)速度不大于1 m/s。為實(shí)現(xiàn)重100 t的船載設(shè)備進(jìn)行±4 m、運(yùn)動(dòng)周期為8 s的實(shí)船工況仿真,本文設(shè)計(jì)了一種工作臺(tái)面40 m×40 m見方的超大型6自由度運(yùn)動(dòng)平臺(tái),并分別從機(jī)構(gòu)布置、運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)分析及驅(qū)動(dòng)選型這3個(gè)方面展開研究工作,以解決液壓缸缸速過高帶來的密封圈壽命縮短、重載荷導(dǎo)致的驅(qū)動(dòng)力需求過大、高速重載帶來的系統(tǒng)功耗過大的難題。
1 機(jī)械系統(tǒng)組成
本文所提出的高速、重載、大范圍6自由度運(yùn)動(dòng)平臺(tái),用合頁驅(qū)動(dòng)機(jī)構(gòu)支鏈代替?zhèn)鹘y(tǒng)STEWART平臺(tái)的作動(dòng)筒,是擁有6條URRRR(RPR)支鏈的并聯(lián)機(jī)構(gòu)平臺(tái),其構(gòu)型如圖1所示。該平臺(tái)機(jī)械結(jié)構(gòu)由4部分組成:上側(cè)運(yùn)動(dòng)臺(tái)面、6組合頁驅(qū)動(dòng)機(jī)構(gòu)支鏈、自重平衡機(jī)構(gòu)及下側(cè)固定臺(tái)面。
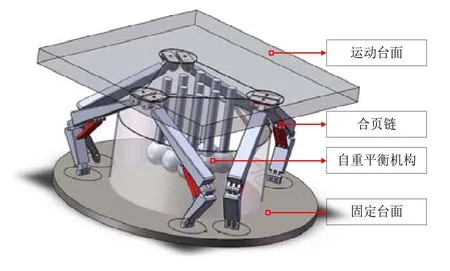
圖1 高速重載6自由度運(yùn)動(dòng)平臺(tái)三維圖
自重平衡機(jī)構(gòu)與運(yùn)動(dòng)臺(tái)面固連,由置于水中的串聯(lián)空心球與浮力提供機(jī)構(gòu)(水池)組成。單組合頁驅(qū)動(dòng)機(jī)構(gòu)支鏈包括合頁回轉(zhuǎn)頭、合頁上臂、液壓活塞桿、液壓缸缸筒、合頁下臂及基座回轉(zhuǎn)鉸鏈,如圖2所示。基座回轉(zhuǎn)鉸鏈可簡化為一個(gè)叉軸軸線方向固定的萬向節(jié),即軸5固定。將除基座回轉(zhuǎn)鉸鏈以外的部分稱為合頁鏈(URRU(RPR))鏈。
為降低機(jī)構(gòu)的扭轉(zhuǎn)強(qiáng)度指標(biāo),提高系統(tǒng)結(jié)構(gòu)安全性,將合頁鏈的運(yùn)動(dòng)約束在同一平面內(nèi)。合頁鏈的各部件滿足以下約束關(guān)系:合頁鏈所有部件以圖2中的面1對(duì)稱,且面1在機(jī)構(gòu)運(yùn)行過程中始終與水平面垂直。中軸面2與面3相交于軸4,軸1、軸2、軸3、軸4之間相互平行且均垂直于軸5。軸5始終與水平面垂直,且始終位于面1上。
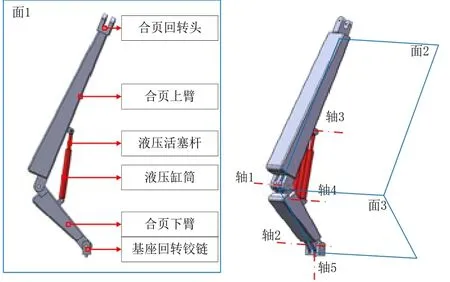
圖2 單組合頁驅(qū)動(dòng)機(jī)構(gòu)支鏈結(jié)構(gòu)圖
通過合理設(shè)計(jì)軸3、軸4間的長度及合頁鏈與上下平臺(tái)兩對(duì)應(yīng)鉸點(diǎn)軸線間的長度,可實(shí)現(xiàn)驅(qū)動(dòng)缸速度比例減小,但驅(qū)動(dòng)缸的驅(qū)動(dòng)力需求成比例增大。考慮到液壓驅(qū)動(dòng)系統(tǒng)的安全性與維修性,為每組合頁驅(qū)動(dòng)鏈上冗余布置多個(gè)液壓缸。
2 平臺(tái)運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)分析
2.1 機(jī)構(gòu)簡圖及運(yùn)動(dòng)學(xué)分析
圖3為平臺(tái)機(jī)構(gòu)簡圖,其中Mi(i=1, 2,··, 6)表示合頁回轉(zhuǎn)頭與運(yùn)動(dòng)平臺(tái)連接處的虎克副鉸鏈點(diǎn)中心;Di表示基座回轉(zhuǎn)鉸鏈耳環(huán)中心;Ri為合頁上臂與合頁下臂連接處的鉸鏈點(diǎn)中心;pi為液壓活塞桿與合頁上臂鉸鏈點(diǎn)中心;ci為液壓缸與合頁下臂鉸鏈點(diǎn)中心。
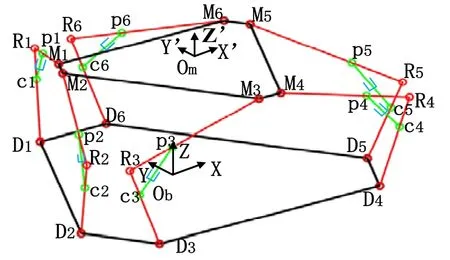
圖3 平臺(tái)結(jié)構(gòu)簡圖
全局參考坐標(biāo)系{Rb}:Ob-XYZ坐標(biāo)原點(diǎn)位于六邊形D1D2D3D4D5D6的幾何中心,Z軸正向垂直于六邊形平面向上,Y軸正向垂直于連線D1D6。動(dòng)坐標(biāo)系{Rm}:Om-X’Y’Z’坐標(biāo)原點(diǎn)位于上平臺(tái)六邊形M1M2M3M4M5M6的幾何中心,Z’軸正向始終垂直于運(yùn)動(dòng)平臺(tái)平面且指向平臺(tái)外部空間,Y’軸正向垂直于連線M1M6。慣性坐標(biāo)系{Rg}:Og-X''Y''Z''的坐標(biāo)原點(diǎn)位于運(yùn)動(dòng)平臺(tái)初始中位時(shí)上鉸點(diǎn)組成的六邊形中心。當(dāng)平臺(tái)處于初始中位時(shí),動(dòng)坐標(biāo)系{Rm}與慣性坐標(biāo)系{Rg}重合。
記運(yùn)動(dòng)臺(tái)面空間的位姿向量為X=[x,y,z,ψ,θ,φ]T,分別表示船舶縱蕩、橫蕩、垂蕩、橫搖、縱搖和艏搖運(yùn)動(dòng),各坐標(biāo)系間對(duì)應(yīng)轉(zhuǎn)換關(guān)系為

式中:H為平臺(tái)初始中位時(shí)的高度;gmR(ψ,θ,φ)為動(dòng)坐標(biāo)系到慣性坐標(biāo)系的映射矩陣。
{Rm}相對(duì)于{Rg}的姿態(tài)變化采用XYZ型卡爾丹角進(jìn)行描述,兩坐標(biāo)系間姿態(tài)映射旋轉(zhuǎn)矩陣為
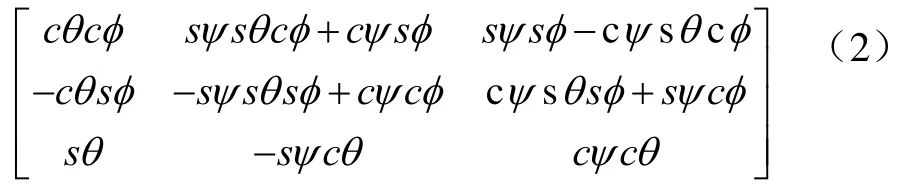
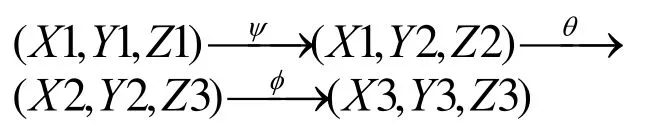
即動(dòng)坐標(biāo)系分別繞慣性坐標(biāo)系X1Y2Z3軸的順序進(jìn)行姿態(tài)角轉(zhuǎn)換:
為實(shí)現(xiàn)合頁機(jī)構(gòu)的速度等比例縮放,機(jī)構(gòu)各組件長度應(yīng)滿足:

式中:k為縮放系數(shù),取大于1的整數(shù)。
為使一個(gè)運(yùn)動(dòng)周期內(nèi)驅(qū)動(dòng)缸行程與虎克副受力更加均勻?qū)ΨQ,平臺(tái)尺寸應(yīng)滿足:

式中:Lml為上平臺(tái)長邊Lml、Lms為上平臺(tái)短邊;Ldl為下平臺(tái)長邊、Lds為下平臺(tái)短邊。
將6自由度平臺(tái)單支腿系統(tǒng)簡化為空間簡圖,如圖4所示。
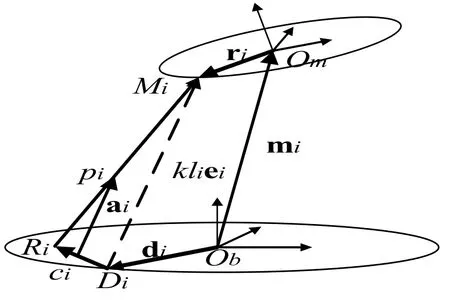
圖4 平臺(tái)單支腿結(jié)構(gòu)簡圖
液壓缸上下兩鉸點(diǎn)間長度記為li,則活塞桿的伸縮量為

式中:l0為平臺(tái)處于初始中位時(shí)各液壓缸上下鉸點(diǎn)的長度;的簡記;r為的簡記;di為的簡記。
2.2 平臺(tái)動(dòng)力學(xué)分析
該平臺(tái)動(dòng)力學(xué)分析可通過類比標(biāo)準(zhǔn)STEWART平臺(tái)動(dòng)力學(xué)模型得到,根據(jù)牛頓—?dú)W拉動(dòng)力學(xué)方程[3],系統(tǒng)各組液壓缸驅(qū)動(dòng)力為

式中:Fcyl為各組液壓缸驅(qū)動(dòng)力;Gs為平臺(tái)與負(fù)載的重力及慣性力之和;B為浮球機(jī)構(gòu)所提供的鉛垂向浮力;MGs為Gs相對(duì)Om的力矩MGs;MB為B相對(duì)Om的力矩。雅可比矩陣J6×6,如式(7)所示[4]:

式中:e為三維向量的簡記。
3 驅(qū)動(dòng)特性分析
3.1 自重平衡機(jī)構(gòu)有效性驗(yàn)證
6自由度平臺(tái)運(yùn)動(dòng)指標(biāo)如表1所示。
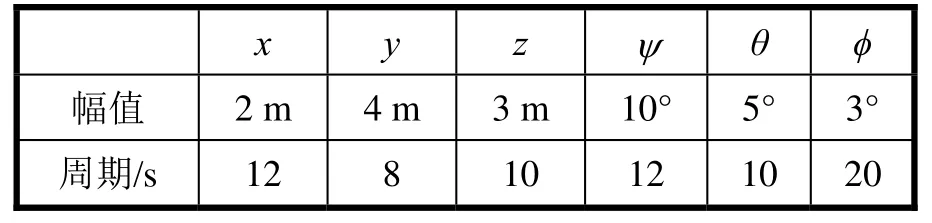
表1 6自由度平臺(tái)運(yùn)動(dòng)指標(biāo)
6自由度平臺(tái)的關(guān)鍵尺寸如表2所示。
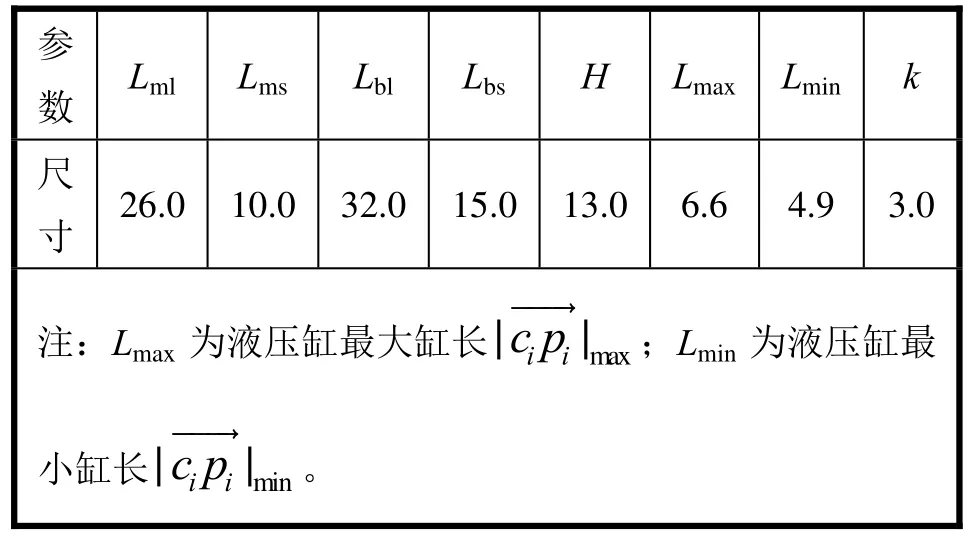
表2 平臺(tái)主要尺寸(單位:m)
船設(shè)備重100 t,帶自重平衡機(jī)構(gòu)的平臺(tái)框架與船載設(shè)備總計(jì)400 t,單組合頁鏈由3只液壓缸驅(qū)動(dòng)。在ADAMS環(huán)境中建立6自由度平臺(tái)虛擬機(jī)模型,將重力自平衡機(jī)構(gòu)等效為施加在上側(cè)運(yùn)動(dòng)平臺(tái)的一個(gè)豎直向上的恒力,平臺(tái)模型如圖5所示。
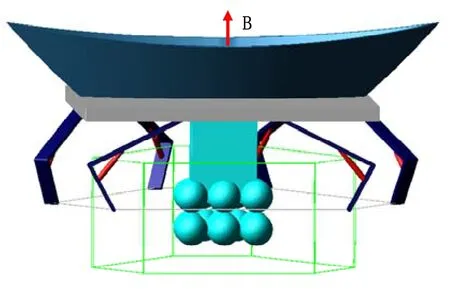
圖5 平臺(tái)虛擬機(jī)模型
在MATLAB中使用表1、表2數(shù)據(jù)對(duì)平臺(tái)橫蕩運(yùn)動(dòng)進(jìn)行反解計(jì)算,令活塞桿伸縮數(shù)據(jù)驅(qū)動(dòng)圖5模型中的活塞桿進(jìn)行動(dòng)力學(xué)計(jì)算。采用了自重平衡策略和未采用自重平衡策略的平臺(tái)仿真得到的液壓缸驅(qū)動(dòng)力需求分別如圖6(a)、圖6(b)所示。
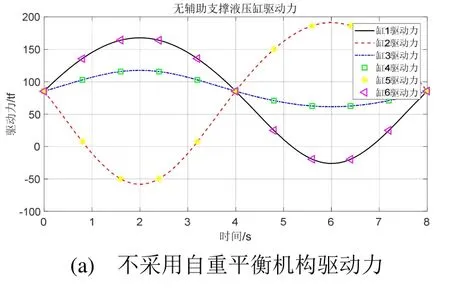
圖6 驅(qū)動(dòng)力曲線圖
觀察曲線可知采用自重平衡機(jī)構(gòu)雖增大了平臺(tái)整體質(zhì)量,在動(dòng)力學(xué)計(jì)算過程中增加了平臺(tái)慣性力需求,但因機(jī)構(gòu)運(yùn)行的加速度較小,且浮力機(jī)構(gòu)抵消了整個(gè)機(jī)構(gòu)的自重,系統(tǒng)運(yùn)動(dòng)所需的最大驅(qū)動(dòng)力依舊顯著降低了67.5%,表明采用自重平衡機(jī)構(gòu)可大大減小驅(qū)動(dòng)系統(tǒng)的工作強(qiáng)度。同時(shí)由于自重平衡機(jī)構(gòu)的設(shè)置增加了運(yùn)動(dòng)臺(tái)面上支撐點(diǎn)的數(shù)量,平臺(tái)機(jī)械系統(tǒng)的剛度得到了有效的提高。
3.2 驅(qū)動(dòng)缸特性分析
驅(qū)動(dòng)平臺(tái)運(yùn)動(dòng)的雙作用活塞式液壓缸有雙出桿式、單出桿式和差動(dòng)式3種結(jié)構(gòu),下面針對(duì)本文運(yùn)動(dòng)平臺(tái)特性對(duì)3種結(jié)構(gòu)的液壓系統(tǒng)功耗與流量進(jìn)行計(jì)算,為減少平臺(tái)運(yùn)行功耗提供設(shè)計(jì)依據(jù)。
壓力恒定工況下,雙出桿式液壓缸可提供的驅(qū)動(dòng)力與活塞環(huán)形面積大小成正比,根據(jù)最大驅(qū)動(dòng)力計(jì)算出采用雙出桿式驅(qū)動(dòng)時(shí)系統(tǒng)的橫蕩運(yùn)動(dòng)功耗,如圖7(c)所示。兩類單出桿液壓缸的有桿腔均依靠環(huán)形面積驅(qū)動(dòng),單出桿式無桿腔依靠活塞面積驅(qū)動(dòng),差速式無桿腔依靠活塞桿面積驅(qū)動(dòng)。為保證差速式缸活塞的推程與回程速度一致,液壓缸缸徑、活塞桿徑與最大載荷關(guān)系應(yīng)滿足式(6):

式中:D為液壓缸缸徑;d為活塞桿直徑;p為液壓系統(tǒng)壓力,p=21 MPa。
計(jì)算得出單桿液壓缸d1=0.20 m,D1=0.28 m,2類單出桿液壓缸驅(qū)動(dòng)的系統(tǒng)消耗功率如圖7(a)、圖7(b)所示,雙出桿液壓缸驅(qū)動(dòng)的系統(tǒng)消耗功率如圖7(c)所示。
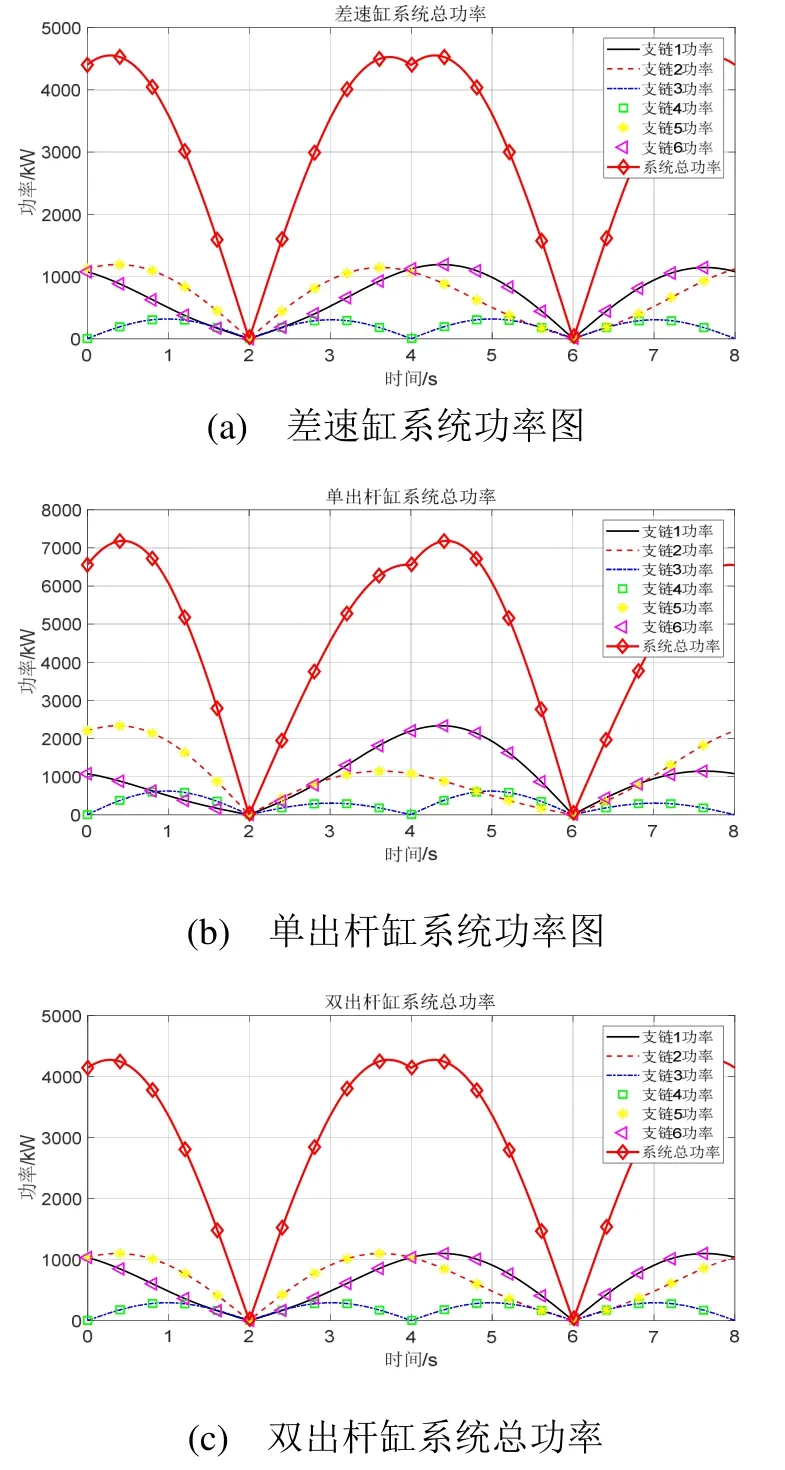
圖7 3種驅(qū)動(dòng)方式系統(tǒng)功率對(duì)比
由圖7可知:差動(dòng)式驅(qū)動(dòng)比單出桿式驅(qū)動(dòng)的系統(tǒng)平均功耗減少了32.9%,因此不考慮采用單出桿式驅(qū)動(dòng)形式。雙出桿驅(qū)動(dòng)較差速缸驅(qū)動(dòng)更加節(jié)省功率,但考慮到本平臺(tái)的大慣性特點(diǎn),且雙出桿缸所需布置空間過大、組成結(jié)構(gòu)復(fù)雜故不予采用。綜上,選擇單出桿差速缸作為本文6自由度平臺(tái)的驅(qū)動(dòng)機(jī)構(gòu)。
為滿足液壓系統(tǒng)的恒壓大流量需求,提高液壓系統(tǒng)驅(qū)動(dòng)效率,借鑒文獻(xiàn)[5]中的方法,本文使用大排量定量泵組、大排量恒壓變量泵組及大容量蓄能器組構(gòu)成工作壓力為21 MPa的大流量液壓站。其中定量泵組提供液壓系統(tǒng)驅(qū)動(dòng)控制所需要的最小流量需求,恒壓變量泵組提供運(yùn)動(dòng)平臺(tái)工作時(shí)需要的平均流量需求,蓄能器組在系統(tǒng)低流量工作時(shí)儲(chǔ)存泵組提供的多余壓力油,在系統(tǒng)大流量工作時(shí)與泵組一起提供壓力油。
據(jù)圖6及式(6)計(jì)算得到不采用自重平衡機(jī)構(gòu)的液壓驅(qū)動(dòng)缸尺寸為d2=0.34 m,D2=0.48 m。不采用自重平衡策略和采用自重平衡策略的平臺(tái)通過仿真計(jì)算得到的系統(tǒng)功耗分別如圖8(a)、圖8(b)所示。
由圖8可知,采用自重平衡機(jī)構(gòu)的平臺(tái)相對(duì)于不采用自重平衡機(jī)構(gòu)的平臺(tái)能使系統(tǒng)消耗的平均功率減少65.9%,因此自重平衡機(jī)構(gòu)在降低功耗方面具有極大的應(yīng)用價(jià)值。

圖8 液壓系統(tǒng)功率比較圖
4 結(jié)論
針對(duì)大型船舶設(shè)備實(shí)船工況的仿真需要,設(shè)計(jì)了一種大作業(yè)空間、高速、重載的超大型6自由度運(yùn)動(dòng)平臺(tái)。通過采用合頁比例放大機(jī)構(gòu),實(shí)現(xiàn)了液壓驅(qū)動(dòng)缸缸速的等比例減小,延長了密封圈的工作壽命;利用浮球自重平衡機(jī)構(gòu),降低了液壓缸的驅(qū)動(dòng)力及系統(tǒng)功率需求;采用單出桿差速液壓缸驅(qū)動(dòng)方式,減少了液壓系統(tǒng)的功率消耗,合理布置了支腿機(jī)械結(jié)構(gòu)。本文的研究工作,對(duì)于大范圍高速重載運(yùn)動(dòng)模擬平臺(tái)的設(shè)計(jì)及實(shí)際應(yīng)用具有一定的指導(dǎo)意義。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32