船舶電網數字化保護系統可靠性建模與分析
2022-01-21 09:45:44崔忞忞
機電設備 2021年6期
崔忞忞
(海裝上海局駐南京地區軍事代表室,南京 210006)
0 引言
近年來,我國大型船舶發展迅速,智能化、數字化保護系統也開始在船舶上得到運用。然而,船舶電氣二次裝備與陸上變電站二次裝備在結構和組成上均有區別,并且相比常規陸上變電站環境,船舶電氣二次裝備要承受更為惡劣的環境條件。同時,由于船舶空間狹窄,現場安裝空間非常有限,這要求船舶電網保護系統的功能高度集成化。借鑒陸上電網智能變電站的成果,對船舶電網保護系統進行數字化與智能化改造是提高功能集成度、減少裝置數量的有效手段。在新技術裝艦應用前,需要通過仿真分析,對新型系統的可靠性與可用性進行比較和驗證。
基于IEC 61850標準[1],結合數字化變電站系統的特點,利用可靠性框圖分析方法,有學者提出了一種通過子系統計算變電站整體可靠性的方法[2]。在數字化變電站系統劃分中,將其分為通信系統、控制系統、保護系統、站控層系統。利用可用性框圖可以得到每個子系統可靠性參數;通過系統與子系統的關系構造系統可用性框圖,最終計算出整個變電站的可靠性參數。
可靠度和可用度是分別針對可修復系統和不可修復系統的2個評價指標,在考慮可用性時,需確定系統的檢修策略,合理的檢修策略能減少系統非計劃停運時長,增加系統可用性。目前,我國的電力系統普遍采用定期檢修策略,且近年來開始了狀態檢修與定期檢修相結合的研究與實踐[3]。文中保護系統的檢修方式暫不考慮狀態檢修,采用故障檢修與定期檢修相結合的維修策略。
在可修系統可靠性的評估方法中,應用較為成熟的有解析法[4]和蒙特卡羅仿真法。其中,主要的解析法是馬爾可夫模型法[4]。該方法能夠建立精確的狀態空間模型。但對于復雜系統,該方法容易導致狀態空間爆炸問題。與之比較,蒙特卡羅仿真法按照抽樣理論的原則,并不企圖給出關于可靠性問題的解析表達式,而是通過指定數量的隨機模擬實驗來推導出系統的可靠性。當仿真次數足夠大時,仿真結果將收斂,可以用來指導系統可靠性評估。
本文通過調研獲取了船舶電網保護系統的典型結構、可靠性參數以及維修策略;利用可靠性框圖分析方法,根據保護系統的典型結構,考慮組網方式,進行了船舶電網保護系統的可靠性建模,得到系統可靠度、失效率和元件重要度等參數。進一步考慮保護系統的檢修策略,利用蒙特卡羅仿真法,進行船舶電網保護系統的可用性建模,得到系統可用度和失效數等參數。最后定量分析和對比了常規保護系統和數字化保護系統在可靠性與可用性方面的差異。
1 船舶電網保護系統結構
為對數字化保護系統的可靠性進行分析,本文以常規保護系統作為比較基準。為此,本節先分別給出這2類保護系統的結構。
1.1 常規保護系統
圖1為常規保護系統的接線圖,保護模擬量信號均通過電纜傳輸。本文重點考察發電機保護系統、弦側跨保護系統和母線保護系統。
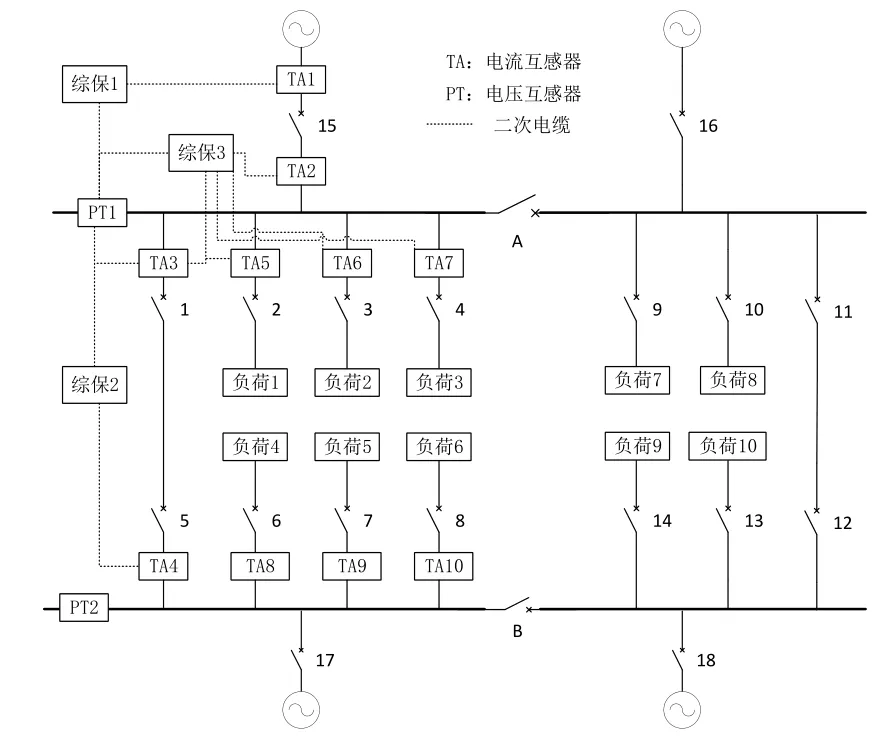
圖1 船舶電網常規保護系統接線圖
1)發電機保護系統:配置綜合保護(簡稱“綜保”)裝置1,分別采集TA1、TA2的電流和PT1的電壓,并以開關15為跳閘開關。開關1及分段開關A處的綜保裝置皆配置過電流保護,可作為發電機的遠后備保護。
2)舷側跨線保護系統:配置綜保裝置2,采集TA3、TA4的電流和PT1的電壓,跳閘開關為開關1、開關5。
3)母線保護系統:配置綜保裝置3,采集TA2、TA3、TA5~7的電流和PT1的電壓,跳閘開關為開關1、開關2、開關3、開關4、開關15。
此外,各開關自身都具有過流保護能力。
1.2 數字化保護系統
圖2為數字化保護系統的接線圖。與常規保護系統所不同的是,該新型保護系統引入了小型化的非常規互感器,并通過光纖傳輸電流信號。但電壓信號仍采用模擬量采集方式,且跳閘信號也保留電纜直跳的方式。
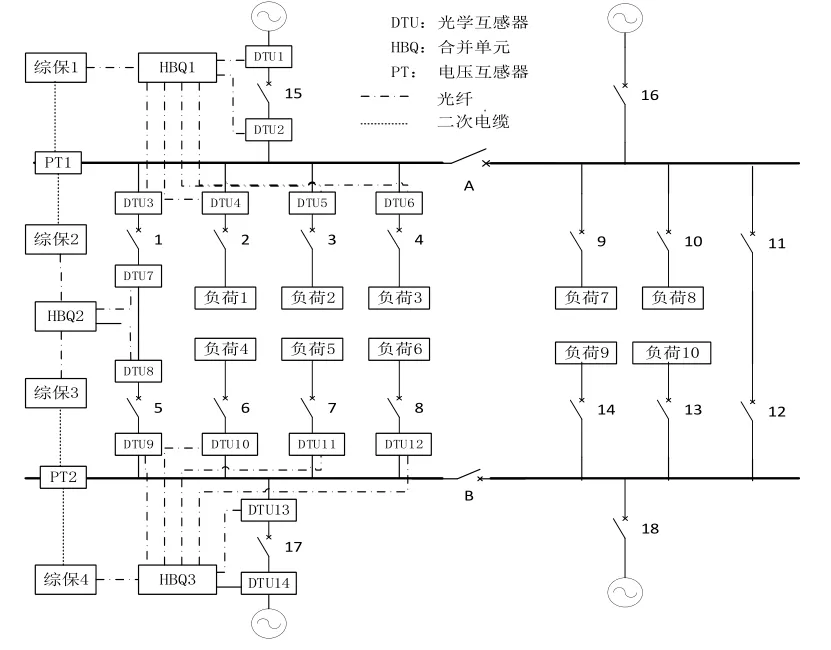
圖2 船舶電網數字化保護系統接線圖
1)發電機保護系統:配置數字化綜保裝置1、合并單元HBQ1、非常規互感器DTU1/2以及電壓互感器PT1,跳閘開關為開關15。其余配置情況同常規保護系統。
2)舷側跨線保護系統:配置數字化綜保裝置2/3、合并單元HBQ2、非常規互感器DTU7/8以及電壓互感器PT1/2,跳閘開關為開關1、開關5。其余配置同常規保護系統。
3)母線保護系統1:與發電機保護共用綜保裝置1,由合并單元HBQ1以及非常規互感器DTU1~6采集電流信號。母線保護系統2由綜保裝置4完成,保護系統配置與母線保護系統1相似。
2 可靠性建模與分析方法
2.1 可靠性框圖
可靠性框圖(Reliability Block Diagrams,RBD)方法能夠描述完成特定系統功能的所有元件之間的邏輯連接[2],是一種面向系統結構的常用可靠性分析方法。在建立系統RBD之后,可以找出系統的所有最小路集(minimal path sets),設為P1,P2, ···,Pp。設Xi是系統中第i個元件的狀態(0代表失效,1代表工作)。則系統結構函數為

由此,將系統中每個元件的狀態代入式(1),即可得到整個系統的狀態。
本文只考慮保護系統拒動問題。根據圖1和圖2,可得到各保護系統的RBD,如圖3~圖5所示。
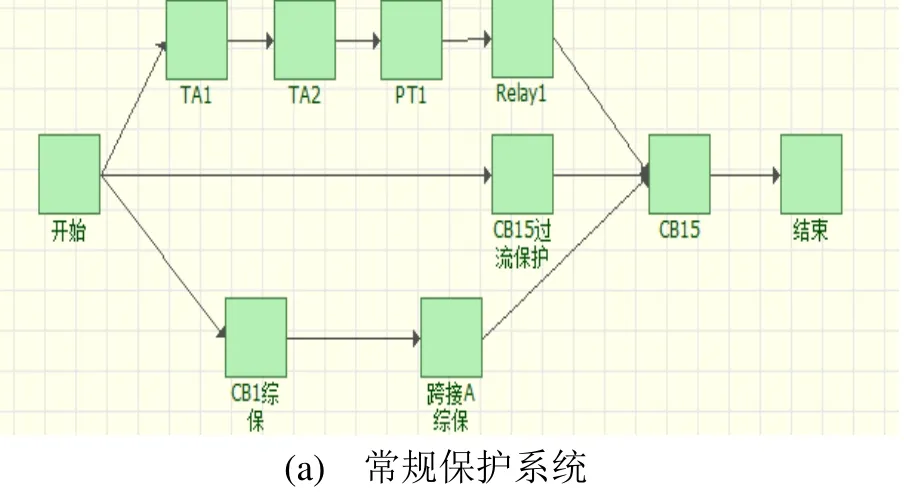
圖3 發電機保護系統的可靠性框圖
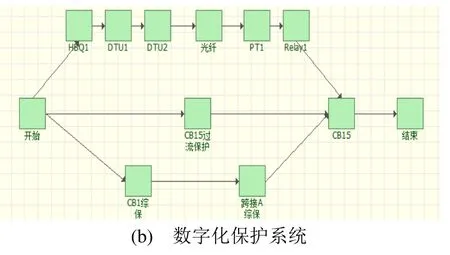
圖3 發電機保護系統的可靠性框圖(續)
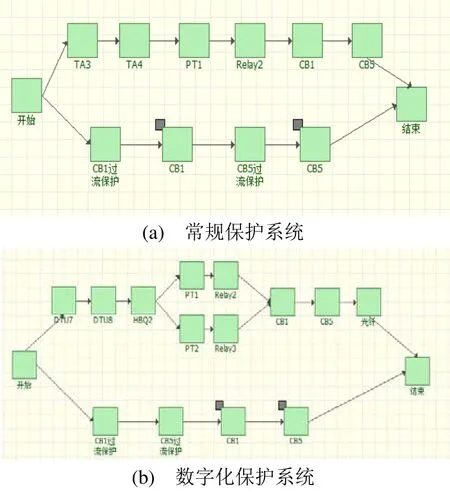
圖4 舷側跨線保護系統的可靠性框圖
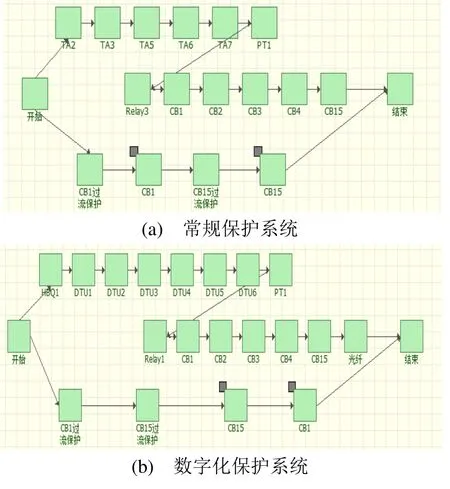
圖5 母線保護系統的可靠性框圖
2.2 考慮檢修策略的系統可用性分析
對于保護系統,本文采用由運行巡視、故障維修以及計劃維修相結合的檢修策略。上述基本維修任務的屬性如表1所示[6]。其中,運行巡視包括人員例行巡視以及系統自檢等方式;故障維修是指故障發生后的糾正性維修;而計劃維修是指周期性開展的預防性維修措施。
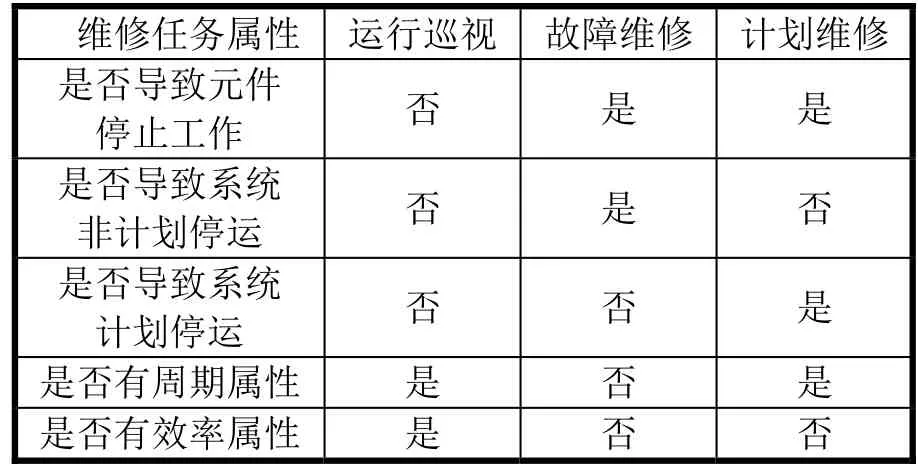
表1 基本維修任務及其屬性
2.3 蒙特卡羅仿真方法
RBD方法僅適用于不可修系統的可靠性分析。為了考慮檢修策略,本文將其與蒙特卡羅仿真結合起來。蒙特卡羅仿真是一種利用重復統計實驗來求解物理數學問題的方法。
設失效時間T的分布函數為FT(t)。當FT(t)是單調增函數時,對于所有y∈(0, 1),F-1T(y)是唯一確定的。令Y=FT(t),則Y的分布函數為[8]
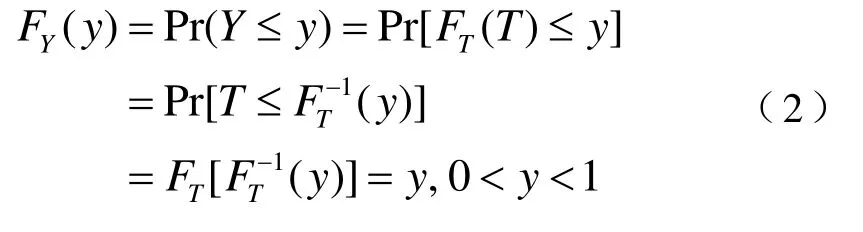
式中:如果在(0, 1)上均勻采集隨機變量Y,那么隨機變量T=F-1T(Y)將滿足分布FT(t)。
根據各元件的故障分布和保護系統的維修策略,利用蒙特卡羅仿真方法根據式(1)生成隨機事件的發生時刻,并結合RBD方法,即可得到系統各可用性參數。圖6為仿真流程圖。
3 結果與分析
3.1 參數設置
各裝置可靠性參數與維修參數如表2所示,預防性維修的周期設為一年。本文假定所有元件的可靠性參數均符合指數分布,假定非常規互感器的可靠性不如常規互感器。考慮到船舶運行環境較為惡劣,表2中可靠性參數低于陸上同類型元件的可靠性[3]。
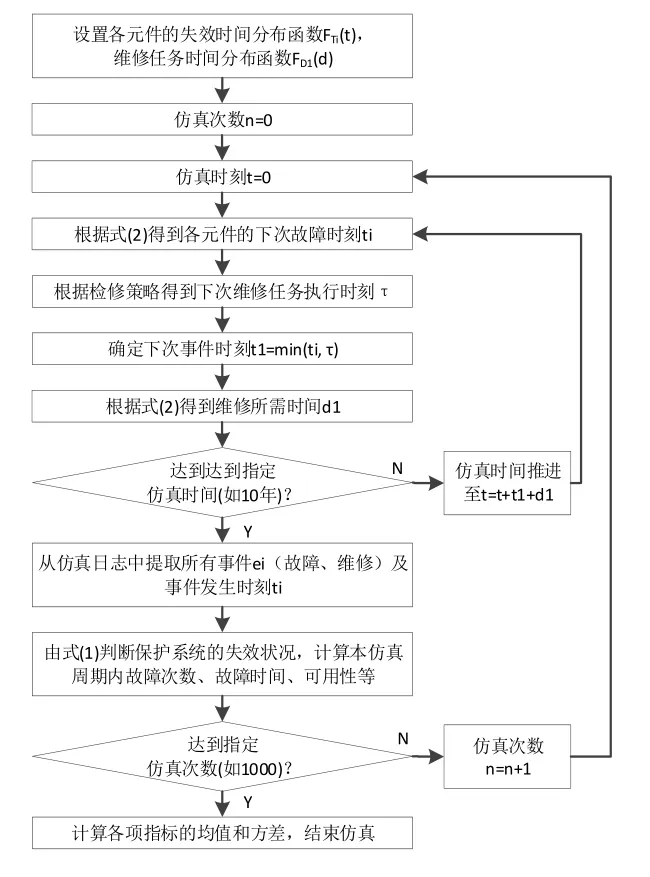
圖6 蒙特卡洛仿真流程圖
在進行蒙特卡羅仿真時,仿真時間設為10年,仿真次數設為1 000次。
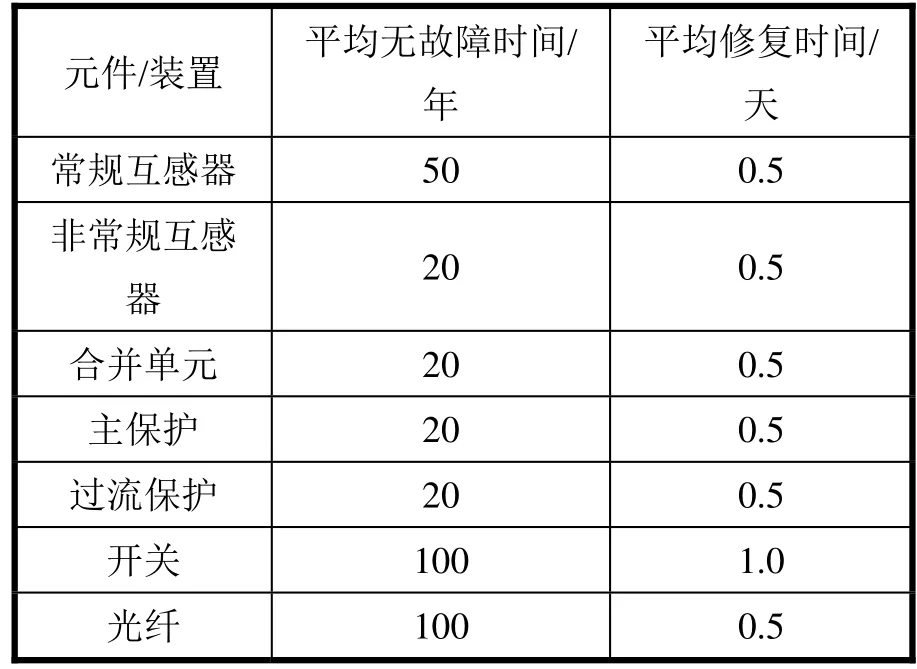
表2 各裝置可靠性參數與維修參數
3.2 可靠性計算結果
3.2.1 發電機保護系統
將常規保護系統與數字化保護系統橫向對比于表3,可見,在僅有1套主保護時,數字化保護系統可用性低于常規保護系統。這是由于數字化保護系統中增加了合并單元,使得系統結構更為復雜,且現階段非常規互感器的可靠性低于常規互感器。在配置了后備保護后,數字化保護系統與常規保護系統的可用性則基本一致。

表3 常規、數字化發電機保護系統可靠性
3.2.2 舷側跨線保護系統
由表4可見,常規舷側跨線保護只有一套主保護,而數字化舷側跨保護的主保護有兩套互為補充,因此其主保護系統可用性差異很小。在配置了后備保護后這種差距被進一步縮小。
3.2.3 母線保護系統
由表5可見,母線保護系統包含的元件數量明顯多于發電機保護和跨線保護。在實施數字化方案后,系統中進一步增加了較多的非常規互感器,以及合并單元等裝置,因此其主保護的可用性明顯低于常規保護系統。而在考慮了后備保護后,常規保護系統與數字化保護系統的可用性基本一致。

表5 常規、數字母線保護系統可靠性
3.3 討論
IEC 61508標準[24]中提供了電子與電氣系統安全等級評判的一般依據。該標準將可修復系統的安全可靠等級分為1~4級,其中,4級為最高級別。根據本文的評估結果,上述保護系統的安全可靠等級只能達到2級(即系統可用性介于99.0%~99.9%)。陸上保護系統一般能達到3級(即系統可用性介于99.90%~99.99%)標準。
為了達到這個目標,可以考慮的改進方案包括:
1)在檢修策略方面,可以改進現有的計劃檢修方式,引入狀態檢修以進一步降低非計劃停運的發生概率。
2)在元件層面,可以提升非常規互感器等關鍵元件的可靠性,同時降低元器件的修復時間。
3)在系統方面,可以通過保護雙重化來降低拒動概率;同時,提高作為后備保護的過流元件的可靠性。
此外,充分利用數字化保護系統的信息共享性,由綜保裝置1~4組成區域保護系統,也是值得重點研究的系統可用性提升方案。
4 結論
本文運用可靠性分析的一般方法,根據船舶保護系統的配置進行了可靠性、可用性建模,研究了各系統的可靠性、可用性指標。分別討論了在不同保護配置情況下的系統可靠性,定量分析了后備保護對保護系統的顯著影響。
隨著后備保護的加入,發電機保護系統的可靠性不斷加強,可用性安全等級均由第一級升至第二級,這代表著后備保護系統的加入可以顯著增強系統可靠性。數字化保護系統中由于非常規互感器、合并單元和光纖等裝置的加入,其可靠性與可用性比常規保護系統有所下降。在主、后備保護同時投運的情況下,整套保護系統的可靠性與可用性的差異被顯著縮小。由此可見:在實用中采用數字化的主保護裝置,可以在基本不影響保護系統可靠性的前提下,充分發揮和利用數字化技術的優勢。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45