并聯(lián)三鉗指柔性壓電微夾鉗的設(shè)計(jì)與分析*
2022-01-21 00:32:04蔡永根沈忠良肖國華楊少增崔玉國
傳感器與微系統(tǒng) 2022年1期
蔡永根, 沈忠良, 肖國華, 楊少增, 崔玉國
(1.浙江工商職業(yè)技術(shù)學(xué)院 機(jī)電工程學(xué)院,浙江 寧波 315012;2.寧波大學(xué) 機(jī)械工程與力學(xué)學(xué)院,浙江 寧波 315211)
0 引 言
微夾鉗作為微操作系統(tǒng)的末端執(zhí)行機(jī)構(gòu),用于目標(biāo)微物體的搬運(yùn)、操作等,其性能的好壞直接決定系統(tǒng)的精確與否[1,2]。將壓電執(zhí)行器作為微夾鉗的驅(qū)動器的研究較為廣泛,而此類結(jié)構(gòu)可分為壓電懸臂梁式與柔性結(jié)構(gòu)放大式。柔性結(jié)構(gòu)放大式微夾鉗具有輸出位移與輸出力大,結(jié)構(gòu)多變等特點(diǎn),使此類微夾鉗結(jié)構(gòu)的研究成為持續(xù)的熱點(diǎn)[3]。
重慶大學(xué)機(jī)械學(xué)院紀(jì)久祥[4]設(shè)計(jì)的柔性結(jié)構(gòu)驅(qū)動微夾鉗,該微夾持器有兩個(gè)鉗指,輸入位移經(jīng)柔性鉸鏈機(jī)構(gòu)放大后,可使輸入位移放大5.8倍,鉗指最大輸出位移為91.5 μm,可操作微物體的尺寸范圍為317~500 μm。澳大利亞莫納什大學(xué)Zubir M N M[5,6]設(shè)計(jì)的柔性鉸鏈放大式二鉗指微夾鉗;壓電執(zhí)行器產(chǎn)生微位移,驅(qū)動左邊杠桿偏轉(zhuǎn),使左鉗指平行移動,同時(shí)右邊杠桿在壓電執(zhí)行器驅(qū)動下帶動右鉗指移動,從而使微夾鉗產(chǎn)生夾持操作。鉗指最大運(yùn)動位移可到達(dá)100 μm,最大夾持力可達(dá)到10 mN。新加坡南洋理工大學(xué)Nah S K等人[7]設(shè)計(jì)的柔性鉸鏈?zhǔn)綁弘娢A鉗,整體尺寸為36 mm×30 mm×3 mm,在100 V驅(qū)動電壓作用下,經(jīng)柔性鉸鏈放大后的鉗指輸出位移為170 μm。吉首大學(xué)伍威等人[8]設(shè)計(jì)的空間型微夾持器具有4個(gè)鉗指,鉗指最大輸出位移與放大倍率的理論值分別為3.817 mm和47.722,仿真值為3.702 mm和46.284,解析值與仿真值具有良好的一致性。重慶大學(xué)林超等人[9,10]設(shè)計(jì)了一種可三級放大輸出位移的微夾鉗,具有大位移、低耦合等特點(diǎn),其固有頻率為223H,位移放大倍數(shù)可實(shí)現(xiàn)19.7,在750 μm的行程下,其耦合位移僅為2.625 μm。
國內(nèi)外學(xué)者對兩鉗指的柔性結(jié)構(gòu)微夾持器有較為深入的研究。然而,兩鉗指微夾持器的輸出力為平面夾持力,無法滿足不規(guī)則操作對象的穩(wěn)定抓取、搬運(yùn)、裝配等操作,更無法對微小操作對象實(shí)現(xiàn)較為精準(zhǔn)的定向控制[11,12]。在實(shí)際工程應(yīng)用中,微夾鉗需與其他構(gòu)件配合使用,只在理論上追求一體成型微夾鉗的無裝配誤差、無摩擦等優(yōu)點(diǎn),不但會限制應(yīng)用范圍,更會制約其結(jié)構(gòu)的創(chuàng)新與發(fā)展[13,14]。
受工程應(yīng)用中三爪電缸的啟發(fā),本文設(shè)計(jì)一種結(jié)構(gòu)空間對稱的并聯(lián)三鉗指微夾鉗,可單個(gè)壓電執(zhí)行器同時(shí)驅(qū)動三個(gè)并聯(lián)鉗指,即可實(shí)現(xiàn)三個(gè)鉗指位移與力的同步輸出與平行輸出。
1 微夾持器結(jié)構(gòu)設(shè)計(jì)
雙鉗指微夾持器通常在一塊原料上加工而成,可省去裝配上的誤差,但其結(jié)構(gòu)較為復(fù)雜、加工精度要求高,在實(shí)際加工過程中,需不斷改變夾持角度,不僅加工周期長、成本大,而且加工過程中易變形、加工精度很難保證。本文所設(shè)計(jì)并聯(lián)三鉗指微夾鉗存在同樣的加工問題,因此選擇將其拆分成多個(gè)零件,通過不同的定位方式保證精度要求。
圖1為并聯(lián)三鉗指微夾鉗的三維模型總裝圖,包括3個(gè)結(jié)構(gòu)相同的并聯(lián)鉗指、1個(gè)鉗指聯(lián)結(jié)塊、1個(gè)壓電執(zhí)行器底座、1個(gè)底座、1個(gè)預(yù)緊螺釘、3個(gè)定位環(huán)、1個(gè)壓電執(zhí)行器。三個(gè)鉗指通過切邊定位銷與螺釘周向均布并聯(lián)在底座上,聯(lián)結(jié)塊將三個(gè)鉗指上橋式放大機(jī)構(gòu)的運(yùn)動端聯(lián)結(jié)為一個(gè)整體,通過內(nèi)部的定位環(huán)保證其定位精度,此設(shè)計(jì)可實(shí)現(xiàn)單個(gè)壓電執(zhí)行器同時(shí)驅(qū)動三個(gè)鉗指,既可保證其運(yùn)動狀態(tài)同步,又能實(shí)現(xiàn)輸出位移一致;通過壓電執(zhí)行器底座及其下方的預(yù)緊螺釘實(shí)現(xiàn)壓電執(zhí)行器的預(yù)緊。
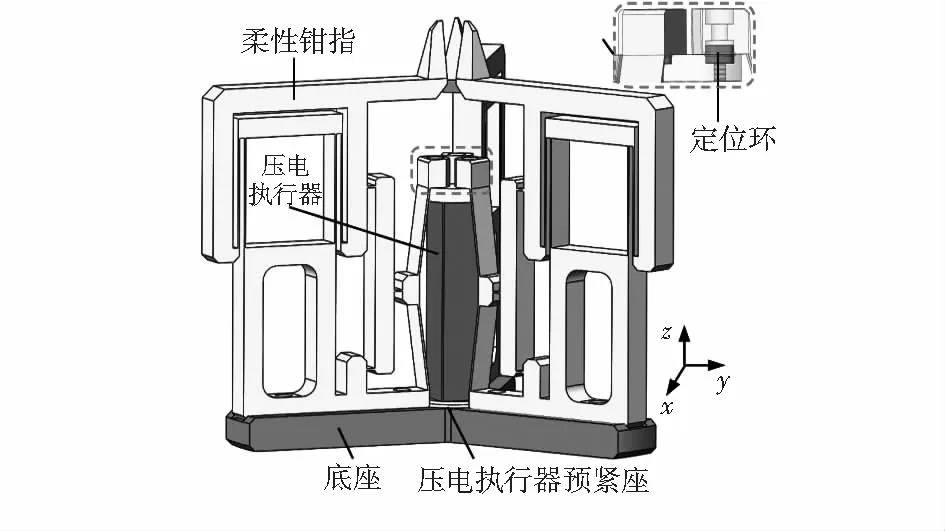
圖1 總裝示意
柔性鉗指通過橋式機(jī)構(gòu)和杠桿機(jī)構(gòu)實(shí)現(xiàn)位移的二級放大,通過兩個(gè)四桿機(jī)構(gòu)的導(dǎo)向機(jī)構(gòu)消除鉗指在垂直于水平方向上的耦合位移,可使輸出位移始終保持平行輸出,如圖2所示。壓電執(zhí)行器沿z軸方向輸出的位移作為柔性鉗指的輸入位移,輸入位移經(jīng)橋式放大機(jī)構(gòu),實(shí)現(xiàn)位移的一級放大;接著,經(jīng)一級放大后的位移經(jīng)過杠桿機(jī)構(gòu)實(shí)現(xiàn)位移的二級放大。在對鉗指定位上,使用切邊圓柱實(shí)現(xiàn)x向、y向及旋轉(zhuǎn)方向的約束。
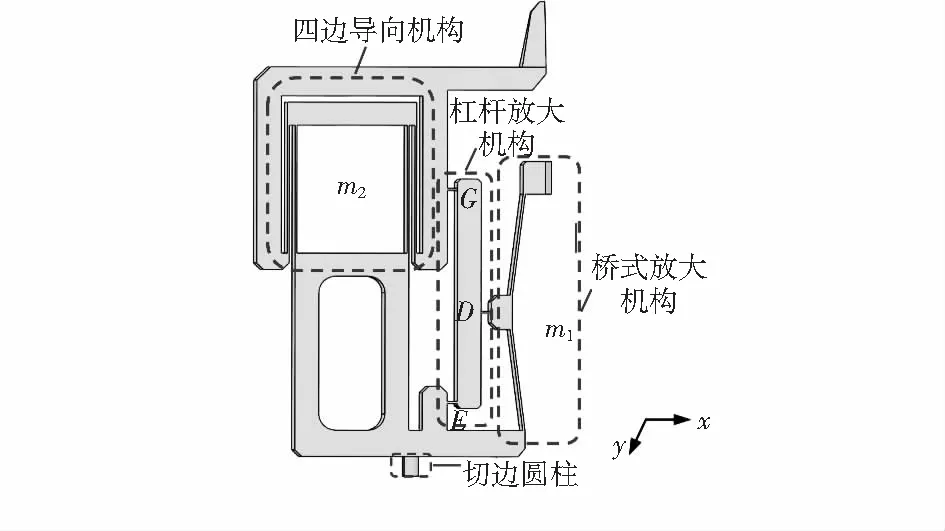
圖2 柔性鉗指
橋式放大機(jī)構(gòu)與杠桿機(jī)構(gòu)較為熟悉。四邊導(dǎo)向機(jī)構(gòu),如圖3所示,在非工作狀態(tài)下,為兩個(gè)長方形連桿串聯(lián)機(jī)構(gòu),可將其看作一個(gè)正向四連桿機(jī)構(gòu)和一個(gè)逆向四連桿機(jī)構(gòu)相疊加,當(dāng)導(dǎo)向機(jī)構(gòu)在x軸正方向受力時(shí),正向四連桿機(jī)構(gòu)沿著y軸正方向所產(chǎn)生的寄生位移δz與逆向四連桿機(jī)構(gòu)沿著y軸反方向所產(chǎn)生的寄生位移δf在理論上數(shù)值相等,二者可相互抵消。
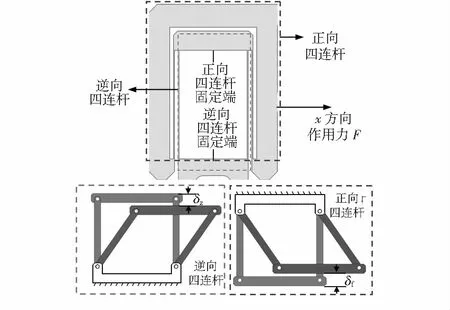
圖3 導(dǎo)向機(jī)構(gòu)工作原理
該微夾鉗選用的材料為鋁合金7075,尺寸參數(shù)如表1所示,整體尺寸為158 mm×158 mm×150 mm。
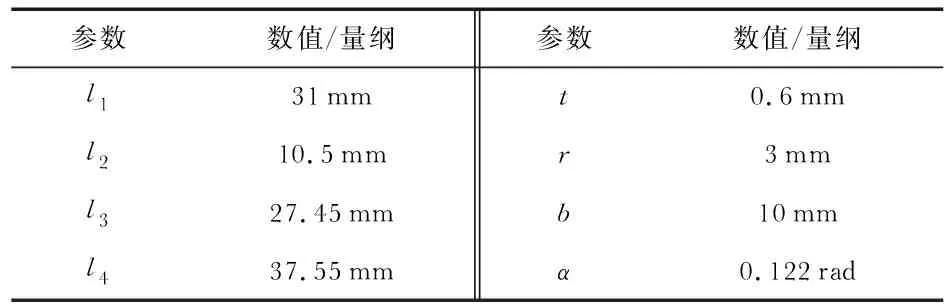
表1 微夾鉗尺寸參數(shù)
2 三鉗指微夾持器靜動態(tài)特性分析
對三鉗指微夾持器進(jìn)行剛度分析是靜態(tài)分析的核心部分,而靜態(tài)分析是研究其輸出位移與夾持力的基礎(chǔ)。接下來將運(yùn)用較為形象、簡單的偽剛體法,完成微夾持器的理論分析。
2.1 位移放大倍率模型
首先分析橋式放大機(jī)構(gòu)的放大倍率理論模型,圖4為其簡化模型,a,b,c,d分別為鉸鏈之間的交點(diǎn),柔性薄板與z軸的初始夾角同為α,受力變形后與z軸的夾角為β,上端為運(yùn)動端,下端為固定端,因此,當(dāng)壓電執(zhí)行器輸出位移為δAz時(shí),z方向輸出位移(即A點(diǎn)的輸出位移)δAz=xz/2,忽略薄板ab,cd的變形,則可得
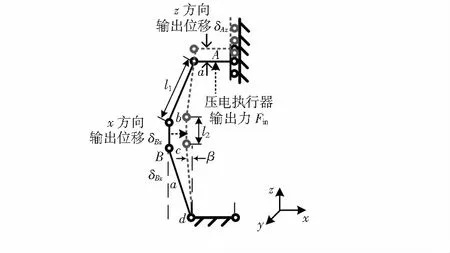
圖4 橋式放大機(jī)構(gòu)模型
γl1cosα+xz/2=γl1cosβ
(1)
γl1sinα-δBx=γl1sinβ
(2)
式中γ=0.85,為連架桿有效長度數(shù)。
根據(jù)式(1)、式(2)求得δBx的表達(dá)式
δBx=
(3)
因此,可得橋式放大機(jī)構(gòu)的放大倍率Rq
Rq=2δBx/δAz
(4)
杠桿放大機(jī)構(gòu)分為微夾持器的第二級放大,其簡化模型如圖5所示,橋式放大機(jī)構(gòu)的輸出位移δBx作為杠桿放大機(jī)構(gòu)的輸入位移,杠桿機(jī)構(gòu)的輸出位移δ1與δBx的比值即為杠桿放大機(jī)構(gòu)的放大倍率Rl
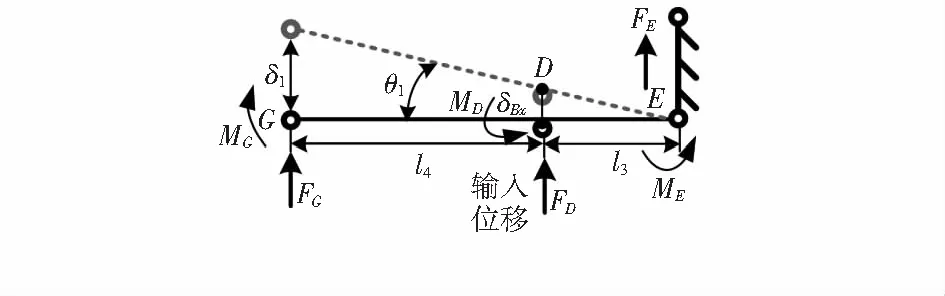
圖5 杠桿放大機(jī)構(gòu)簡化模型
(5)
因此,三并聯(lián)微夾持器的放大倍率模型為
R=Rl×Rq
(6)
2.2 輸入剛度
2.2.1 三并聯(lián)橋式放大機(jī)構(gòu)
所設(shè)計(jì)微夾持器的柔性鉗指為周向空間均布,每個(gè)鉗指包含橋式放大機(jī)構(gòu)、杠桿放大機(jī)構(gòu)、導(dǎo)向機(jī)構(gòu)三部分。首先對一級放大的橋式機(jī)構(gòu)進(jìn)行剛度分析,該橋式機(jī)構(gòu)由剛性板與柔性鏈組成,三個(gè)橋式放大機(jī)構(gòu)空間對稱且為并聯(lián),圖6為三維模型,由于兩兩互相對稱。多位學(xué)者已經(jīng)運(yùn)用不同方法推導(dǎo)出橋式放大機(jī)構(gòu)的理論模型[15,16],而空間并聯(lián)型橋式放大機(jī)構(gòu)鮮有推導(dǎo),基于橋式放大機(jī)構(gòu)因柔性薄板而產(chǎn)生位移的特點(diǎn),在分析柔性薄板的基礎(chǔ)上求出橋式放大機(jī)構(gòu)的剛度,如圖4、圖5所示,A點(diǎn)處的剛度為其左右移動方向上柔度的倒數(shù),A點(diǎn)的柔度由柔性薄板1~6的柔度決定,故對6個(gè)柔性薄板的柔度進(jìn)行分析,由于其空間對稱,只需分析出1、4,或2、5或3、6其中的一組即可,另外2組可通過對稱關(guān)系求出。
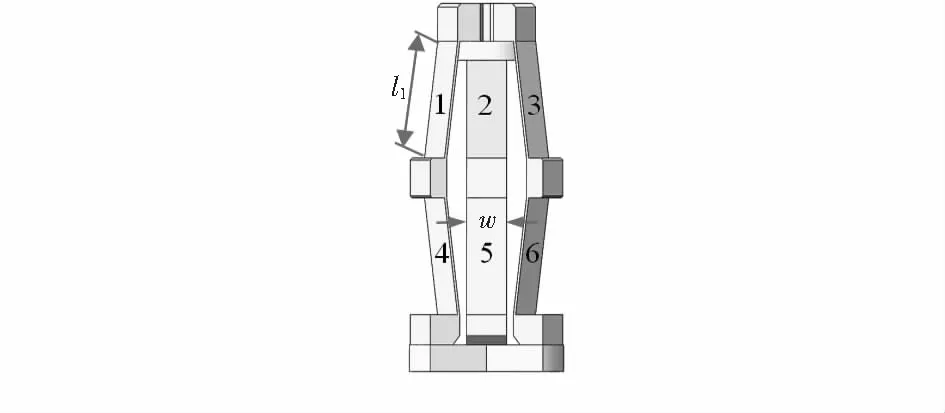
圖6 并聯(lián)橋式放大機(jī)構(gòu)
由于柔性薄板的尺寸完全一致,故各柔性薄板自由運(yùn)動端面中心點(diǎn)處的柔度矩陣完全相同,均為
(7)
柔性薄板1~3為相互串聯(lián),柔性薄板4~6為互相串聯(lián),則柔性薄板1~3串聯(lián)而成的的組合體在A點(diǎn)出的柔度矩陣為
(8)

由于柔性薄板4~6與柔性薄板1~3對稱,則其柔度矩陣可表示為
CA456=Rx(π)CA123(Rx(π))T
(9)
柔性薄板1~3構(gòu)成的組合體與柔性薄板4~6構(gòu)成的組合體通過并聯(lián)方式連接,則在A點(diǎn)處的柔度矩陣為
C123456=((CA123)-1+(CA456)-1)-1
(10)
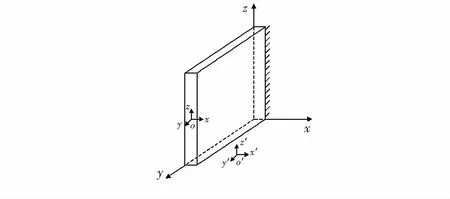
圖7 柔性薄板不同受力點(diǎn)
將作用于o點(diǎn)處的力Fo通過柔度矩陣坐標(biāo)變換的方法變換到o′點(diǎn)。Fo和Fo′的關(guān)系可表示為[17]
(11)

柔性薄板在力Fo,Fo′作用下的柔度矩陣Co,Co′的關(guān)系式為
(12)
因所研究柔性薄板僅在平面內(nèi)運(yùn)動,所以,對應(yīng)的柔度變換矩陣如下
(13)
柔性薄板的尺寸如表1所示。

表1 柔性薄板的尺寸
代入薄板尺寸,可得
(14)

2.2.2 位移導(dǎo)向與杠桿放大機(jī)構(gòu)
杠桿放大機(jī)構(gòu)為該夾持器的二級放大機(jī)構(gòu),當(dāng)橋式放大機(jī)構(gòu)的輸出位移δBx時(shí),經(jīng)由杠桿EG實(shí)現(xiàn)位移的二級放大,經(jīng)二級杠桿放大后的位移為δ1,δ1作為位移導(dǎo)向機(jī)構(gòu)的輸入位移, 直梁型鉸鏈D,E,G的尺寸如圖8所示。其轉(zhuǎn)角剛度為kr,每個(gè)直圓鉸鏈上對應(yīng)的轉(zhuǎn)矩為MD,ME,MG,kr為
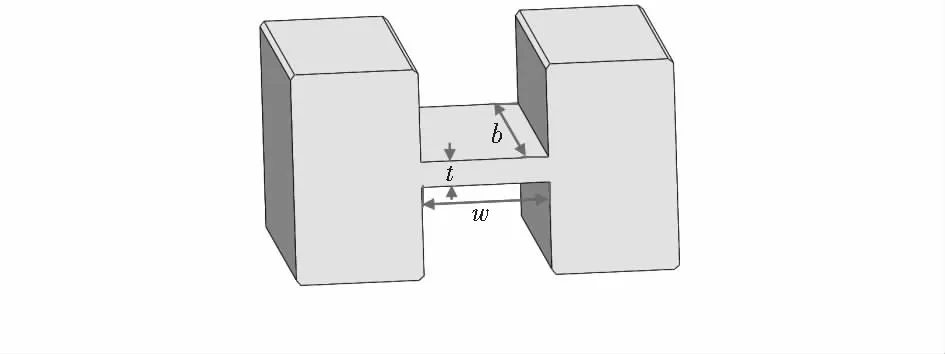
圖8 直圓型鉸鏈
kr=EI/w
(15)
式中E為材料的彈性模量。當(dāng)杠桿受力發(fā)生轉(zhuǎn)動時(shí),其轉(zhuǎn)動角度為θ1,如圖5所示,可近似為θ1=sinθ1=δ1/(l3+l4),由于每個(gè)直梁鉸鏈的轉(zhuǎn)矩均互等,且為krθ1。
由圖5放大杠桿受力平衡可得
FD=FG+FE
(16)
MD+ME+FG(l3+l4)cosθ1=MG+FDl3cosθ1
(17)
位移導(dǎo)向機(jī)構(gòu)由正向平行四連桿和逆向平行四連桿組成,四連桿中的連架桿一段固定一段自由,連架桿繞著固定端旋轉(zhuǎn),則位移導(dǎo)向機(jī)構(gòu)模型可簡化為圖9。連架桿兩端的轉(zhuǎn)動剛度kc為
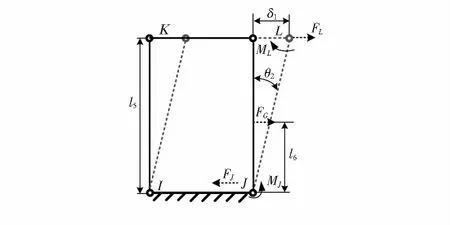
圖9 位移導(dǎo)向機(jī)構(gòu)簡化模型
kc=2γKθEIc/l5
式中Ic為連架桿截面慣性矩;θ2為擺動的角度,且滿足cosθ2=1。
由位移導(dǎo)向機(jī)構(gòu)的受力平衡可得
MG+MI+MJ=γl6FHcosθ2
(18)
MI=MJ=kcθ2=2γKθEIcθ2/l5
(19)
聯(lián)立求解式(15) ~式(19),可求出位移導(dǎo)向與杠桿放大機(jī)構(gòu)的剛度K2
(20)
已知三并聯(lián)橋式放大機(jī)構(gòu)的剛度K1,位移導(dǎo)向與杠桿放大機(jī)構(gòu)K2,由于K1與K2為串聯(lián)剛度,故可求出微夾持器的整體剛度K。
2.3 動態(tài)特性分析
確定微夾鉗的材料后,對應(yīng)各個(gè)構(gòu)件的重量已知,橋式放大機(jī)構(gòu)的輸出位移、微夾鉗的輸出位移已知,其動能E可表示為
(21)
式中m1為橋式放大機(jī)構(gòu)可移動部分及CD剛性部分的重量,m2為位移導(dǎo)向機(jī)構(gòu)可移動剛性部分的重量,JEG為杠桿放大機(jī)構(gòu)中杠桿的轉(zhuǎn)動慣量。
將式(3)~式(6)代入式(18),可得微夾鉗的質(zhì)量M
(22)
由拉格朗日方程可知,固有頻率的計(jì)算公式可表示為
(23)
3 微夾持器仿真分析
3.1 放大倍數(shù)與靜態(tài)位移仿真分析
將建立的三維模型導(dǎo)入Ansys,微夾持器底座全約束,給與壓電執(zhí)行器相接觸的橋式放大機(jī)構(gòu)的內(nèi)表面沿著z軸正方向施加10 μm的位移,圖10為其仿真結(jié)果,仿真出的放大倍率為8.486;將xz=10 μm代入式(6),可得出理論計(jì)算出的放大倍率為9.03,二者數(shù)值相近。
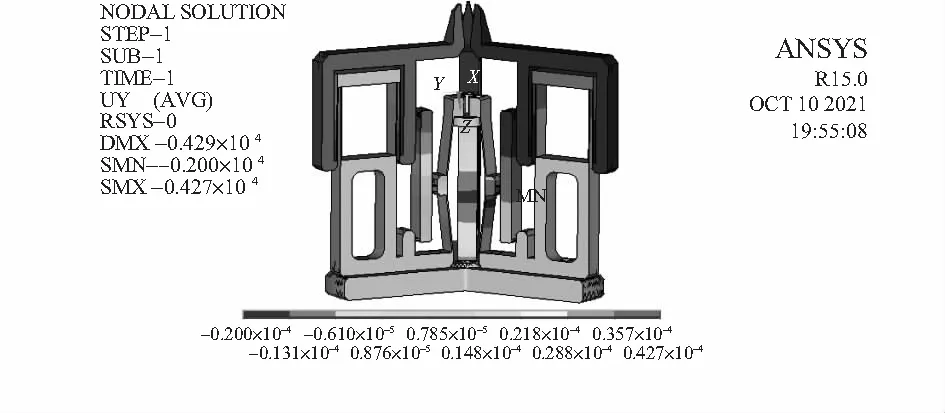
圖10 并聯(lián)三鉗指微夾持器的輸出位移仿真
接著,以間隔為10 μm,逐一施加10~100 μm的位移,不同施加位移下,微夾鉗的放大倍數(shù)具有較好的一致性,相對誤差率幾乎為0,如圖11所示。
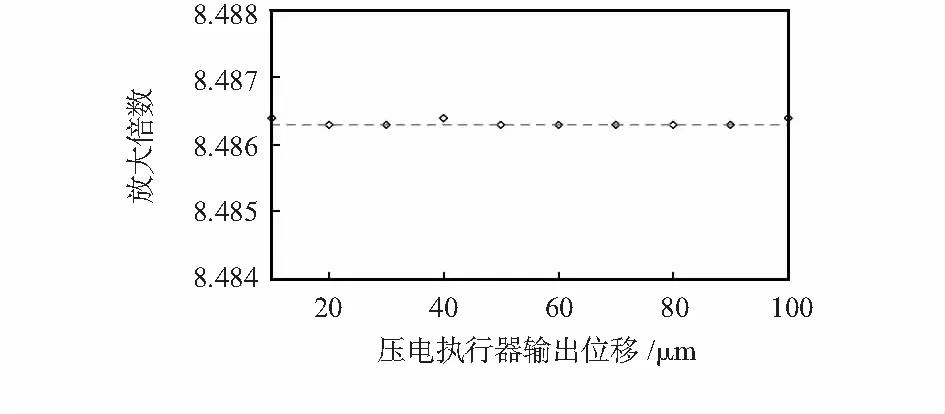
圖11 微夾鉗放大倍數(shù)
3.2 輸入剛度仿真分析
給橋式放大機(jī)構(gòu)與壓電執(zhí)行器相接觸的內(nèi)圓表面施加1 N的均布力,觀察內(nèi)圓表面沿z軸方向的運(yùn)動位移。由圖12的分析結(jié)果可知,在1 N的均布力作用下,驅(qū)動部分沿z方向(即運(yùn)動方向)產(chǎn)生0.31×10-4μm的位移,故仿真而得的微夾持器的剛度為32.258 N/mm。已知橋式放大機(jī)構(gòu)的輸入剛度,將尺寸數(shù)據(jù)代入式(17),理論計(jì)算出的輸入剛度為35.782 N/mm,對比可知,理論值與仿真值相近。

圖12 并聯(lián)三鉗指微夾持器的輸入剛度仿真
3.3 動態(tài)特性仿真分析
給橋式放大機(jī)構(gòu)與壓電執(zhí)行器相接觸的內(nèi)圓表面施加1 N的均布力,頻率范圍為0~2 000 Hz,圖13為微夾鉗前10階模態(tài)分析結(jié)果,其一階固有頻率為204.8 Hz,振型如圖14所示。將微夾鉗的尺寸數(shù)據(jù)代入式(20),可知理論計(jì)算的一階固有頻率為201.4,仿真值與理論值對比可知,二者相近。
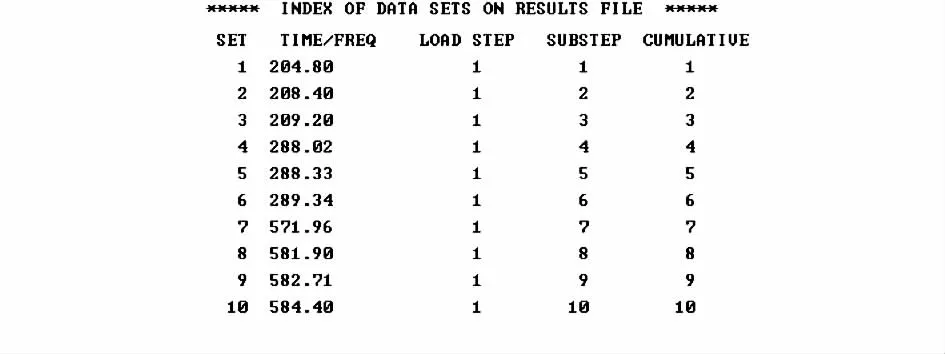
圖13 各階模態(tài)固有頻率的分析結(jié)果

圖14 微夾鉗一階模態(tài)振型
4 結(jié) 論
設(shè)計(jì)了并聯(lián)三鉗指柔性微夾持器,可通過單個(gè)壓電執(zhí)行器同步驅(qū)動并聯(lián)的三個(gè)鉗指,同時(shí)可實(shí)現(xiàn)輸出位移同步放大與平行輸出。首次建立了空間型并聯(lián)三鉗指微夾鉗位移放大倍率、輸入剛度、固有頻率的數(shù)學(xué)模型,并求出對應(yīng)的理論數(shù)值;利用Ansys仿真出位移放大倍率、輸入剛度、固有頻率的仿真數(shù)值,并將解析值與仿真值進(jìn)行對比分析,兩種方式得出的位移放大倍率、輸入剛度、固有頻率吻合度較高,從而可證明所設(shè)計(jì)并聯(lián)三鉗指柔性結(jié)構(gòu)的可行型。
