基于改進蟻群算法的三維路徑規(guī)劃研究*
2022-01-21 00:32:02魯照權孫偉業(yè)詹浩東
傳感器與微系統(tǒng) 2022年1期
魯 飛, 魯照權, 牛 晨, 孫偉業(yè), 詹浩東
(合肥工業(yè)大學 電氣與自動化工程學院,安徽 合肥 230009)
0 引 言
近年來,路徑規(guī)劃一直是機器人研究領域中的熱點問題,其核心要求是按照特定的優(yōu)化準則如距離最短、時間最短、能耗最低等,搜索出一條從起始點到目標點的最優(yōu)安全路徑。目前,國內外已經(jīng)提出了很多算法用于機器人路徑規(guī)劃,如A*算法[1]、人工勢場法等,但大部分研究都是基于二維環(huán)境,對于環(huán)境比較復雜的三維空間存在著不少局限性。隨著研究的深入,有學者提出了智能仿生算法以及它們改進算法的應用,如蟻群算法[2]、遺傳算法[3]、神經(jīng)網(wǎng)絡算法[4]等。其中蟻群算法由于具有較強的適應性和魯棒性,又易與其他方法結合,在機器人路徑規(guī)劃領域得到了廣泛應用,但蟻群算法也存在收斂速度慢、易出現(xiàn)停滯和局部收斂等缺點。文獻[5]、文獻[6]分別將蟻群算法和遺傳算法、粒子群算法相結合,提高了算法尋優(yōu)能力,具有一定的靈活性;文獻[7]通過對初始信息素的差異化分配,并在概率轉移函數(shù)中引入轉角啟發(fā)信息,提高了蟻群搜索效率,但沒有應用于三維環(huán)境中;文獻[8]在螞蟻狀態(tài)轉移的過程中引入稀疏性約束進行改進,有效減少了蟻群的搜索時間,但算法的運行速度有待進一步提高。為使螞蟻盡快找到最優(yōu)解,
本文以路徑的適應度值為優(yōu)化標準,對蟻群算法進行了改進,并運用在三維空間的路徑規(guī)劃上,通過MATLAB仿真證明了改進后的蟻群算法有一定的優(yōu)越性。
1 三維路徑規(guī)劃建模
1.1 三維環(huán)境建模
采用柵格法對三維路徑規(guī)劃空間進行建模。模型抽象方法如下:將三維地圖左下角頂點作為坐標原點A,建立三維坐標系,以A為頂點,分別沿x軸、y軸和z軸方向取三維地圖的最大長度AB,AD,AA′構造立方體區(qū)域ABCD-A′B′C′D,如圖1所示。
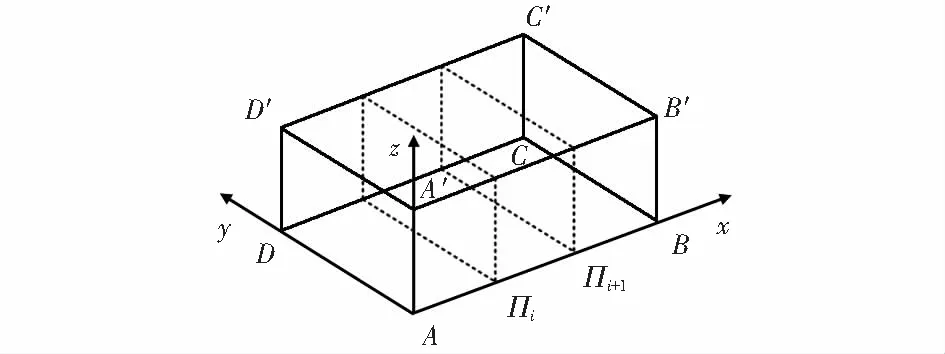
圖1 三維空間劃分
利用平面對三維空間進行均勻劃分,從中抽取出三維路徑規(guī)劃所需要的離散點,首先沿AB邊將空間ABCD-A′B′C′D進行n等分,得到n+1個平面Πi(i=1,2,…n),再對這n+1個平面分別沿AD邊進行m等分,沿AA′進行l(wèi)等分,得到空間中的各個交點。平面劃分如圖2所示。
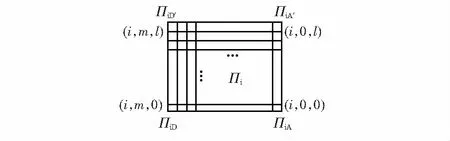
圖2 平面劃分
通過上述步驟,整個規(guī)劃空間ABCD-A′B′C′D被分解成空間離散點的集合,這些離散點便構成蟻群算法搜索的各條路徑。
1.2 可視化搜索空間
為了降低路徑規(guī)劃的復雜程度,在算法中采取一種分層前進與柵格平面法相結合的搜索模式[9],如圖3所示。
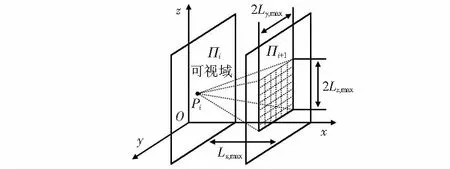
圖3 搜索可視區(qū)域
其思想是: 設定x軸方向為機器人前進的主方向,在該方向上以單位距離劃分層次[10],從當前節(jié)點建立可視域,在前向運動一定距離Lx,max情況下,設定機器人最大橫向移動距離為Ly,max,最大縱向移動距離Lz,max。這樣,當螞蟻由當前節(jié)點轉移到下一節(jié)點時,搜索范圍被限制在可視區(qū)域內,從而簡化了路徑搜索的復雜度。
2 改進蟻群算法
2.1 信息素的初始化
傳統(tǒng)蟻群算法由于各路徑初始信息素濃度相同,使螞蟻在搜索過程中行走的隨機性太強,收斂速度太慢,且信息素的載體為節(jié)點間的線段,大大增加了算法的空間復雜度。本文改進算法將信息素存儲在離散點中,并在初始化時對各離散點信息素進行不均勻分配,目的在于減小算法復雜度,并提高算法初期的搜索效率。具體方法如下:以線段L連接起始點S和目標點D,由于最優(yōu)路徑多集中在L附近區(qū)域。因此,以L與各平面Πi(i=1,2,…,n)的交點為圓心,Lm為半徑,構建較優(yōu)離散點域,根據(jù)區(qū)域內各離散點到直線L的距離,計算各個離散點的初始信息素值,數(shù)學表達式如下
(1)
(2)
式中τ0為離散點初始信息素濃度;Ly,max和Lz,max分別為最大橫向移動距離和最大縱向移動距離;len(Pa,L)為節(jié)點Pa到直線L的距離;λ為地圖比例因子,根據(jù)地圖具體參數(shù)來確定。
2.2 啟發(fā)函數(shù)的改進
啟發(fā)函數(shù)是蟻群算法中的重要組成部分,其作用是利用距離信息引導螞蟻選擇最短路徑,直接影響到算法的收斂性、穩(wěn)定性以及最優(yōu)性[11]。但螞蟻搜索節(jié)點時往往會忽視周圍障礙物因素,優(yōu)先選擇與當前節(jié)點最近的離散點,從而陷入局部最優(yōu)。針對此問題,本文增加可行性策略構造新的啟發(fā)函數(shù),同時引入動態(tài)夾角因素,使螞蟻對最優(yōu)路徑的搜索更具有方向性。本文構造啟發(fā)函數(shù)由以下四部分組成:
1)可行性因素[12]
根據(jù)三維空間內離散點的可行性,對規(guī)劃空間中各節(jié)點的可視區(qū)域離散點計算可行性因素權值。數(shù)學表達式如下
(3)
式中s(ia+1,ja+1,ka+1)為可視域R(Pa)中各離散點的權值,可行點權值為1,否則為0。定義可行性因素S(ia,ja,ka)的計算公式如下
(4)
Num1=∑S(ia+1,ja+1,ka+1)
(5)
式中Num為在點(ia,ja,ka)上可視點的數(shù)量;Num1為可視點中可行離散點的數(shù)量。
啟發(fā)函數(shù)中引入可行性因素雖然使得路徑規(guī)劃的安全性提高,但同時也增加了算法的復雜度,原因在于選擇下一節(jié)點時,要對可視域中所有離散點進行掃描,計算出所有的可行離散點。為解決此問題,本文選擇在建模階段就計算出可視域中各離散點的可行性權值,在計算啟發(fā)函數(shù)時直接調用相應權值即可,有效節(jié)省了計算時間。
2)相鄰節(jié)點路徑長度
D(ia,ja,ka)為兩節(jié)點間路徑長度,促使螞蟻選擇距離較近的點;D(ia,ja,ka)的計算公式如下
D(ia,ja,ka)=
(6)
式中 (ia,ja,ka)為當前節(jié)點的具體坐標,(ia+1,ja+1,ka+1)為下一點坐標。
3)距目標點路徑長度
Q(ia,ja,ka)為下一點到目標點的路徑長度,促使螞蟻選擇距離目標更近的點,Q(ia,ja,ka)的計算公式如下
Q(ia,ja,ka)=
(7)
其中,(iD,jD,kD)為目標節(jié)點坐標。
4)夾角因素

圖4 夾角示意
(8)
夾角因素A(ia,ja,ka)定義為
(9)
式中δ為一個大于零的角度參數(shù),防止θa(ia,ja,ka)為零。ω為角度因素系數(shù),由式(8)可以看出,在當前節(jié)點Pa(ia,ja,ka)可視域內選擇下一節(jié)點Pa+1(ia+1,ja+1,ka+1)時,若夾角θa(ia,ja,ka)趨向于一個較小的角度,則對應的路徑是較優(yōu)的。由于在路徑規(guī)劃初期可視區(qū)域距離目標點D較遠,ω應取較小值以避免角度因素的盲目誘導,提高算法初期的路徑多樣性;在路徑規(guī)劃后期距離目標點較近時,ω的值應該相應增大來提高角度因素的影響。因此,ω在算法迭代運算過程中是一個動態(tài)參數(shù),定義如下
(10)
式中ω0為夾角因素系數(shù)初值,len(Pa,S)為當前點與起始點的距離,len(S,D)為起始點和目標點的距離。結合上述因素,本文構造啟發(fā)函數(shù)H(ia,ja,ka)如下
Γ=D(ia,ja,ka)·Q(ia,ja,ka)
(11)
H(ia,ja,ka)=Γ·S(ia,ja,ka)·A(ia,ja,ka)
(12)
2.3 權重因子α和β的改進
經(jīng)過分析,由于在迭代初期各離散點的信息素濃度不同,此時,信息素權重因子應在路徑選擇中占主導地位,即α的值應較大,β的值應較小。隨著迭代的不斷進行,最優(yōu)路徑上的信息素濃度逐漸遠高于其他路徑,為防止算法陷入局部最優(yōu),應逐漸減小信息素濃度在路徑選擇中的重要程度,即α值逐漸減小,β值相應增加,從而有助于找到全局最優(yōu)解[13]。因此,本文將信息素因子α和啟發(fā)函數(shù)因子β的值改為動態(tài)參數(shù),隨著迭代的進行而做出改變,為使α,β的取值變化更加平穩(wěn),分別采用余弦和正弦函數(shù)進行賦值,如式(13)、式(14)所示
(13)
(14)
式中Nmax為迭代總次數(shù),N為當前迭代次數(shù),則改進后的概率轉移為
(15)
2.4 信息素更新規(guī)則的改進
當蟻群完成一次路徑搜索,以長度作為評價值,將所有螞蟻的路徑長度按照升序排列,只選擇排在前面的部分螞蟻進行信息素更新,更新規(guī)則如下
τijk=(1-ρ)τijk+ρΔτijk
(16)
(17)
式中l(wèi)en(k)為第k只螞蟻經(jīng)過的路徑長度;rank(k)為螞蟻k的排名;μ·M為要更新的螞蟻數(shù)量;ρ為信息素揮發(fā)因子;Q為信息素常量。
為了更好地平衡全局尋優(yōu)能力和局部尋優(yōu)能力,本文根據(jù)文獻[14]中的自適應方法調整ρ,ρ的初始值設置為0.9,當算法在連續(xù)v次迭代內沒有更新最優(yōu)值,ρ按照式(18)調整,計算公式如下
(18)
式中ρmin為預先設置的信息素揮發(fā)速率的最小值,以防止ρ過小而導致收斂速度太慢。
3 算法流程
改進算法的具體步驟如下:
Step1 構建三維工作環(huán)境,確定起始點S和目標點D,并初始化相關參數(shù)。
Step2 信息素初始化,通過式(1)得到各節(jié)點的信息素初始值,對圖中各節(jié)點進行信息素的不均勻分配。
Step3 搜索最優(yōu)路徑,在起始點S放置M只螞蟻,將起始點S放入禁忌表[15]中,根據(jù)式(15)計算每只螞蟻對下一平面中各節(jié)點的狀態(tài)轉移概率,并采用輪盤賭法選擇下一節(jié)點。
Step4 更新禁忌表,并判斷是否到達終點D,當所有螞蟻完成一次搜索后,將路徑長度按照從小到大的順序排列,由式(17)確定要更新的螞蟻數(shù)量,并采用式(16)更新相應路徑上各節(jié)點的信息素值。
Step5 檢驗最優(yōu)解的更新情況,若最優(yōu)解在連續(xù)v次迭代中未發(fā)生變化,按式(18)調整信息素揮發(fā)因子。
Step6 判斷是否達到最大迭代次數(shù),若是,則輸出全局最優(yōu)路徑長度;若否,則清空禁忌表,轉到Step3繼續(xù)執(zhí)行。
4 仿真結果與分析
為了驗證文中改進算法是否有效,在MATLAB 2018a中進行仿真實驗,并將結果與文獻[10]進行對比。
規(guī)劃空間為21 km×21 km×2 km,其中x軸,y軸方向每個節(jié)點間距1 km,z軸方向每個節(jié)點間距200 m。設置路徑起點在規(guī)劃空間的序號為(1,11,3),目標點序號(21,10,5)。
本文改進算法的各項參數(shù)如表1所示。
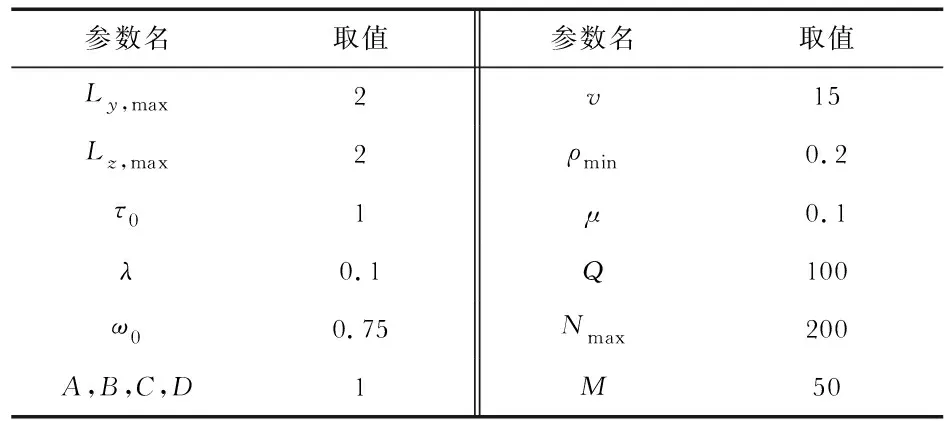
表1 實驗參數(shù)取值
根據(jù)以上參數(shù)進行三維路徑規(guī)劃實驗,通過設置相同參數(shù),與文獻[10]仿真結果圖對比如圖5。其中,三角形曲線為文獻[10]算法所得到的最優(yōu)路徑,正方形曲線為本文改進算法得到的最優(yōu)路徑。
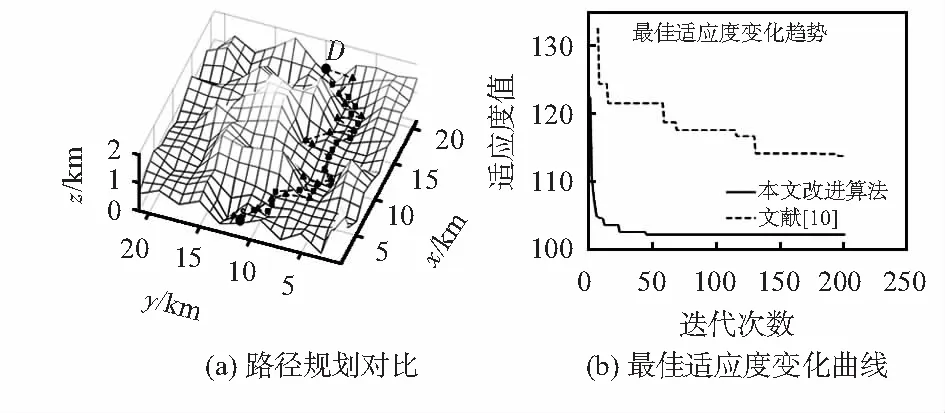
圖5 三維路徑規(guī)劃結果對比
由圖5的適應度變化曲線可以看出,改進后的算法在得到更優(yōu)解的同時,迭代次數(shù)有了明顯減小,證明了本文對蟻群算法的改進是有效的。為保證結果的準確性,分別運用本文改進算法與文獻[10]算法進行多次實驗,隨機抽取4組實驗結果,如表2所示。
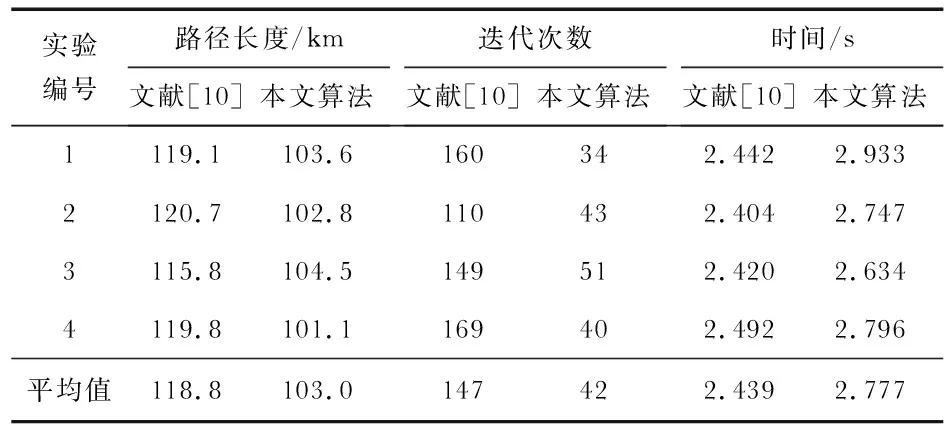
表2 實驗結果
為驗證算法在復雜環(huán)境下的適應性,更換地圖環(huán)境并改變起始點和目標點的坐標,設置起始點和目標點坐標序號分別為(1,17,3)和(21,15,6),再次進行多組實驗,其中一組實驗結果如圖6。
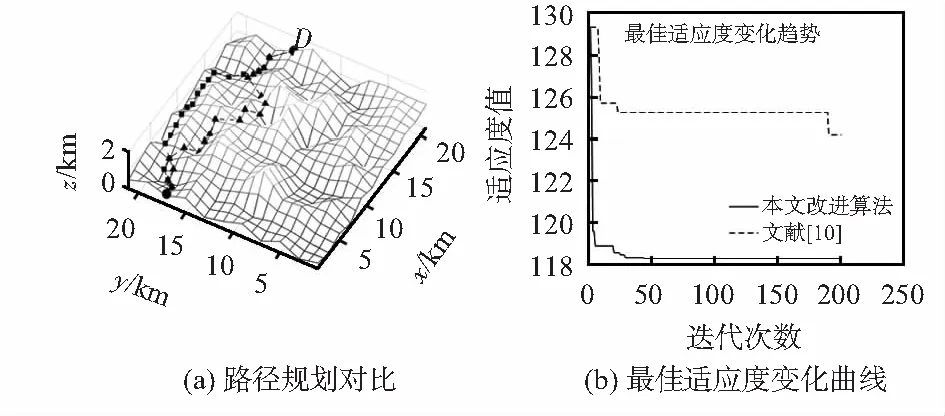
圖6 場景二實驗結果對比
隨機抽取4組實驗結果繪制成表格如表3所示。
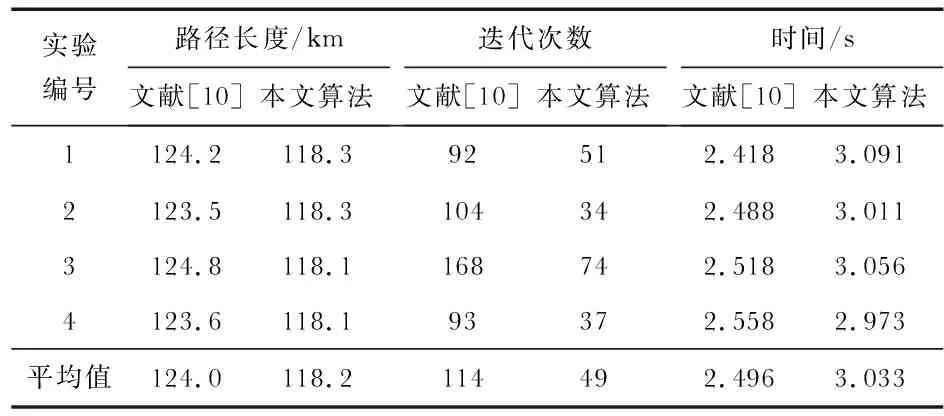
表3 場景二實驗結果
從實驗結果可以看出,引入夾角因素和可行性因素后,算法規(guī)劃出的路徑安全性與方向性都得到了增強,由此可以證明本文提出的改進策略使蟻群算法搜索最優(yōu)解的能力得到了提高,能保證在快速收斂的情況下依然具有較強的全局搜索能力,有效克服了傳統(tǒng)蟻群算法收斂速度慢,易陷入局部最優(yōu)的缺點。
5 結束語
本文針對蟻群算法在三維路徑規(guī)劃中存在的搜索效率低,易陷入局部最優(yōu)等問題,對蟻群算法的初始信息素分配,啟發(fā)函數(shù),權重因子以及信息素更新規(guī)則提出了改進,通過柵格法對三維環(huán)境進行抽象建模,仿真結果表明:改進后的蟻群算法能夠快速有效地實現(xiàn)三維空間中的路徑規(guī)劃,同時具有較強的全局尋優(yōu)能力,相比傳統(tǒng)蟻群算法具有一定的優(yōu)越性,不足之處在于算法的運行時間相對較長,后續(xù)會對如何提高算法運行速度展開進一步研究。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中老年保健(2022年5期)2022-08-24 02:36:04
當代陜西(2021年12期)2021-08-05 07:45:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
冰雪運動(2016年4期)2016-04-16 05:54:56
