多采樣率牽引傳動控制系統(tǒng)中的電流環(huán)建模
2022-01-19 04:55:16王琛琛周明磊
導(dǎo)航與控制 2021年5期
田 鑫,王琛琛,周明磊,王 劍
(北京交通大學(xué)電氣工程學(xué)院,北京 100044)
0 引言
數(shù)字控制系統(tǒng)是一個內(nèi)部既含有連續(xù)時間信號又含有離散時間信號的混合系統(tǒng),系統(tǒng)中的連續(xù)時間信號與離散時間信號分別通過采樣器與保持器進(jìn)行互相轉(zhuǎn)換。如果系統(tǒng)中所有采樣器、保持器都以相同的周期同時動作,則稱這樣的系統(tǒng)為單采樣率系統(tǒng),簡稱為單率系統(tǒng)。如果系統(tǒng)中含有兩個及以上有著不同工作周期的采樣器與保持器,稱這樣的系統(tǒng)為多采樣率控制系統(tǒng),簡稱為多率系統(tǒng)[1]。
隨著數(shù)字控制技術(shù)的發(fā)展,多采樣率控制已被廣泛應(yīng)用于自動化制造、信號處理、航天航空以及機(jī)器人控制等領(lǐng)域。對于多采樣率控制的研究也已經(jīng)持續(xù)多年,并且產(chǎn)生了一系列成果:Kranc[2]提出了開關(guān)分解法,在頻域獲得了多采樣率系統(tǒng)的等效脈沖傳遞函數(shù)模型;Jury等[3]證明了對于周期時變的離散時間系統(tǒng),如果從那些等于其周期整數(shù)倍的采樣時刻來看,是時不變的;Kalman等[4]采用狀態(tài)空間方法描述了多采樣率系統(tǒng)。在此基礎(chǔ)上經(jīng)Araki等[5]、Godbout等[6]的逐漸發(fā)展,利用 “提升”技術(shù)獲得多率系統(tǒng)的等效單采樣率狀態(tài)空間模型漸漸成為對多率系統(tǒng)的主要分析方法。
在大功率的牽引傳動控制系統(tǒng)中,為了提升電流環(huán)的動態(tài)性能,已有文獻(xiàn)結(jié)合多采樣率控制提出了一些高性能的控制算法[7-10]。然而,大多數(shù)文獻(xiàn)只是將單采樣率控制下的控制算法拓展到多采樣率下,對多采樣率控制下系統(tǒng)的數(shù)學(xué)模型、特性等理論分析不足,多采樣率控制下電流環(huán)的設(shè)計存在較大挑戰(zhàn)。
本文對多采樣率牽引傳動控制系統(tǒng)中的電流環(huán)進(jìn)行了分析。首先介紹了多采樣率控制下的系統(tǒng)結(jié)構(gòu),然后運(yùn)用 “提升(Lifting)”技術(shù)分別獲得了理想情況下多采樣率控制下負(fù)載與電流調(diào)節(jié)器的狀態(tài)空間模型,進(jìn)而建立了系統(tǒng)電流環(huán)的等效單采樣率閉環(huán)狀態(tài)空間模型。為了使理論模型更加準(zhǔn)確,分析了多采樣率下系統(tǒng)電流閉環(huán)中的延時以及延時的影響并完善了系統(tǒng)模型。最后,利用Matlab/Simulink仿真驗(yàn)證了本文所建立理論模型的正確性。
1 多采樣率系統(tǒng)結(jié)構(gòu)
1.1 永磁同步電機(jī)連續(xù)時間狀態(tài)空間方程
在兩相同步旋轉(zhuǎn)坐標(biāo)系下,可以得到永磁同步電機(jī)的電壓方程
式(1)中,ud、 uq分別為定子 d軸、q軸的電壓,id、iq分別為定子d軸、q軸的電流,Rs為定子電阻,ωs為電角速度,Ls為電機(jī)的定子電感,ψf為永磁體磁鏈,ωsψf為永磁體反電勢。由于永磁體產(chǎn)生的反電勢ωsψf與定子電流無關(guān),在磁鏈估計準(zhǔn)確時可以被完全補(bǔ)償,因此將式(1)中永磁體反電勢項(xiàng)ωsψf忽略,可以得到狀態(tài)方程
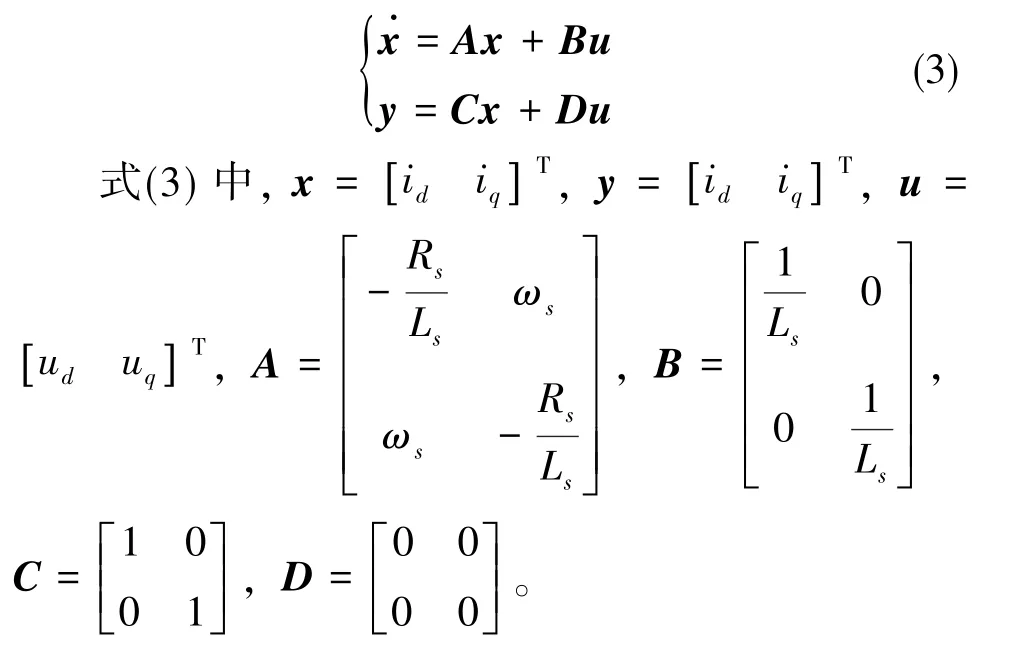
由式(2)可以獲得永磁同步電機(jī)的連續(xù)時間狀態(tài)空間模型
1.2 電流環(huán)結(jié)構(gòu)
考慮到忽略永磁體反電勢項(xiàng)后的永磁同步電機(jī)狀態(tài)空間模型與三相對稱阻感負(fù)載的狀態(tài)空間模型是相同的,因此本文所研究的多采樣率牽引控制系統(tǒng)中的電流環(huán)結(jié)構(gòu)如圖1所示。
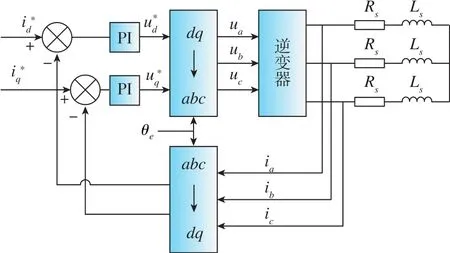
圖1 電流環(huán)結(jié)構(gòu)示意圖Fig.1 Schematic diagram of current loop structure
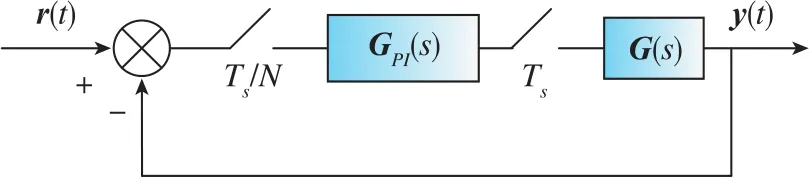
圖2 系統(tǒng)框圖Fig.2 Block diagram of system
圖2中,r(t)為參考輸入, 在本系統(tǒng)中對應(yīng)d軸、 q 軸指令電流; GPI(s)、 G(s)分別為同步旋轉(zhuǎn)坐標(biāo)系下PI控制器與負(fù)載的連續(xù)時間傳遞函數(shù)。對于上述系統(tǒng)而言,從負(fù)載的角度分析,系統(tǒng)屬于輸出多采樣率系統(tǒng),N為系統(tǒng)的輸出采樣重數(shù)[10]。
2 多采樣率下電流環(huán)建模
對于一般的多采樣率數(shù)字控制系統(tǒng),為了簡化分析,常常使用兩個假設(shè):一是假定系統(tǒng)中存在一個基本采樣周期T,系統(tǒng)中各采樣點(diǎn)的采樣周期都是T的整數(shù)倍;二是同時性假定,即假定系統(tǒng)中所有采樣開關(guān)在同一起始時刻開始采樣。在這兩個假設(shè)下,可以利用 “提升”技術(shù)得出系統(tǒng)的線性時不變模型[1]。為了獲得多采樣率下牽引傳動系統(tǒng)的電流環(huán)模型,本節(jié)利用 “提升”技術(shù)先分別獲得負(fù)載與電流調(diào)節(jié)器的狀態(tài)空間模型,進(jìn)而推導(dǎo)出電流環(huán)的閉環(huán)模型。
2.1 多采樣率下負(fù)載狀態(tài)空間模型
對于多采樣率系統(tǒng),定義系統(tǒng)中所有周期的最小公倍數(shù)T0為系統(tǒng)幀周期,以幀周期分析系統(tǒng),系統(tǒng)可以看作是線性時不變的。在本文研究的系統(tǒng)中,易知系統(tǒng)幀周期T0=Ts,并且系統(tǒng)基本采樣周期為ΔT=T0/N。
對于連續(xù)時間狀態(tài)空間方程,可以使用零階保持器對其進(jìn)行離散化。結(jié)合式(3)所表示的負(fù)載連續(xù)時間狀態(tài)空間模型,以幀周期T0進(jìn)行離散化,可以得到單采樣率下系統(tǒng)狀態(tài)空間模型


考慮多采樣率控制下負(fù)載的離散狀態(tài)空間模型,由于在一個幀周期內(nèi)負(fù)載的輸入電壓u保持不變,因此多采樣率下負(fù)載的狀態(tài)方程與式(4)中相同。但是對于負(fù)載的輸出方程而言,由于多采樣率控制,系統(tǒng)在一個幀周期內(nèi)進(jìn)行了N次等間隔采樣,獲得了更多時刻的電流采樣值。為了獲得此時的負(fù)載輸出方程,對于這N次采樣而言,根據(jù)線性系統(tǒng)理論,可以先得到如下所示的狀態(tài)轉(zhuǎn)移方程
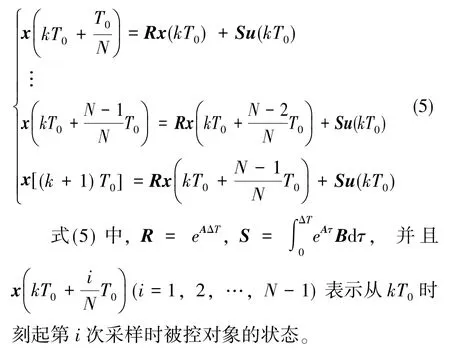
結(jié)合式(4)中負(fù)載的輸出方程與多采樣率下的狀態(tài)轉(zhuǎn)移方程(式(5)),并消除中間采樣時刻的狀態(tài),可以獲得多采樣率控制下的輸出方程,有
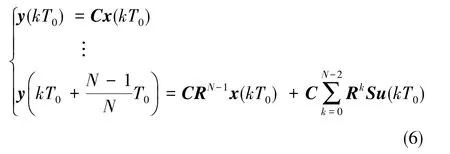
觀察式(6),等號左側(cè)為對負(fù)載輸出N次采樣的結(jié)果,等號右側(cè)為負(fù)載在kT0時刻的輸入u(kT0)與狀態(tài)x(kT0)的線性組合。此時利用 “提升”技術(shù),定義擴(kuò)展輸出變量

則負(fù)載的輸出方程可以寫為
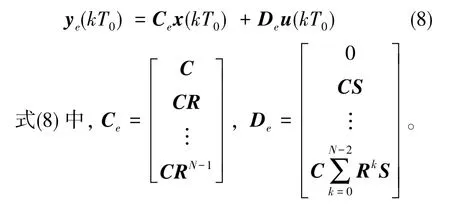
綜上,負(fù)載在多采樣率控制下的狀態(tài)空間模型可以表示為

式(9)中,所有變量的采樣周期都是幀周期T0。換言之,通過這樣的方式獲得了負(fù)載的等效單采樣率狀態(tài)空間模型。
2.2 多采樣率下電流調(diào)節(jié)器狀態(tài)空間方程
在本系統(tǒng)中,電流調(diào)節(jié)器選擇PI控制器。考慮到由于數(shù)字實(shí)現(xiàn),實(shí)際電流調(diào)節(jié)器的輸出存在ΔT的采樣計算延時[7],則在連續(xù)域下的PI控制器如圖3所示。
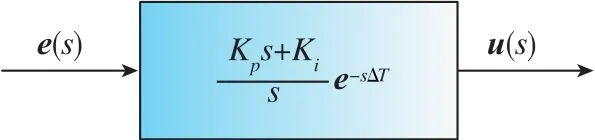
圖3 PI控制器Fig.3 Diagram of PI controller
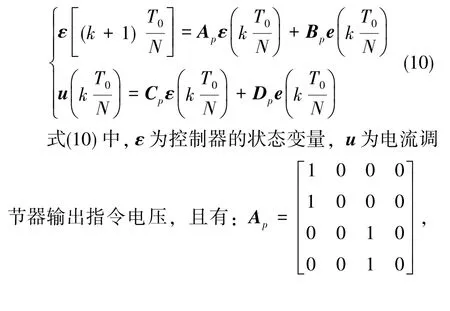
圖3中, e(s)、 u(s)為 PI控制器輸入、 輸出的拉氏變換,Kp、Ki分別為控制器參數(shù)。為獲得在多采樣率下控制器的狀態(tài)空間模型,先將如圖3所示的PI控制器以基本采樣周期ΔT進(jìn)行離散化,可以獲得離散的狀態(tài)空間方程

2.3 系統(tǒng)閉環(huán)模型
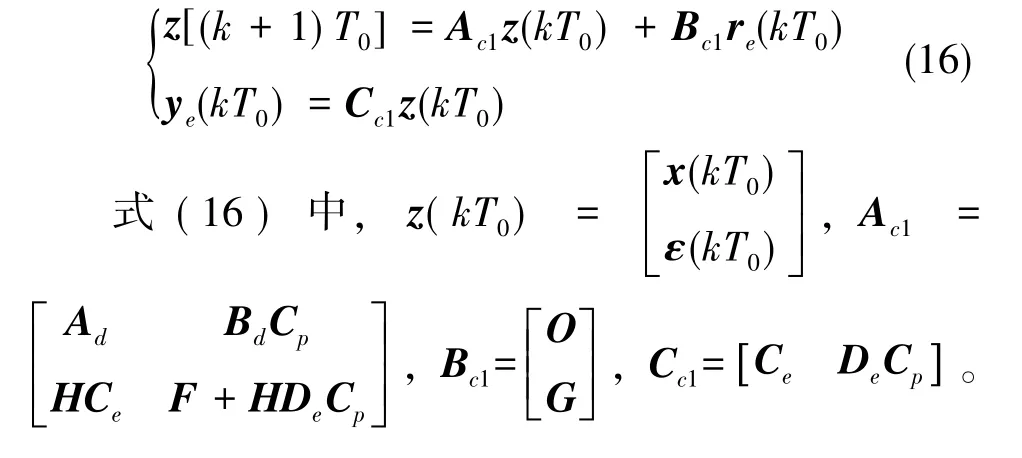
結(jié)合式(9)、 式(15), 可以獲得多采樣率控制下系統(tǒng)電流環(huán)的閉環(huán)模型
3 電流環(huán)延時分析
數(shù)字延時在同步旋轉(zhuǎn)坐標(biāo)系下可以分為角度延時與時間延時兩部分[11]。在前一節(jié)的推導(dǎo)中,本文只考慮到了數(shù)字延時的時間延時部分,而沒有考慮到角度延時的影響,這使得理論模型不夠準(zhǔn)確。在本節(jié)中,首先詳細(xì)分析了多采樣率下電流環(huán)中的延時環(huán)節(jié),然后分析了角度延時對電流環(huán)的影響,進(jìn)而獲得準(zhǔn)確的多采樣率下的電流環(huán)模型。
3.1 電流環(huán)延時分析
在本文所應(yīng)用的多采樣率控制中,電流采樣模式如圖4所示。在一個開關(guān)周期Ts內(nèi)進(jìn)行多次采樣、計算,PWM環(huán)節(jié)每次更新占空比信號都采用最近的一次計算結(jié)果。
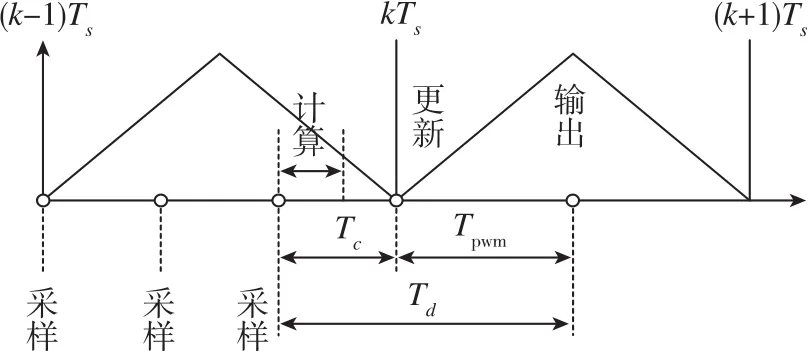
圖4 采樣模式示意圖Fig.4 Schematic diagram of sampling mode
在圖4所示的采樣模式下,電流環(huán)的采樣延時為

同時,PWM環(huán)節(jié)等效為零階保持器,PWM輸出延時為

因此在多采樣率控制下,系統(tǒng)電流環(huán)總延時為

3.2 延時影響分析
由前述可知,在多采樣率控制下系統(tǒng)電流環(huán)總延時為Td,本節(jié)考慮在延遲時間Td內(nèi)角度延時對實(shí)際輸出電壓的影響。根據(jù)復(fù)矢量理論,可以將靜止坐標(biāo)系下和旋轉(zhuǎn)坐標(biāo)系下的電壓矢量用復(fù)矢量的形式表示[12],相應(yīng)的兩相旋轉(zhuǎn)與三相靜止坐標(biāo)系之間的坐標(biāo)變換可以表示成(θe為電壓矢量角度)

假定在一個完整的開關(guān)周期Ts內(nèi)同步旋轉(zhuǎn)速度ωs保持不變,在t0時刻電流調(diào)節(jié)器輸出電壓指令為此時的電壓矢量角度為 θe, 則有

圖5為同步旋轉(zhuǎn)坐標(biāo)系示意圖,t0時刻的同步旋轉(zhuǎn)坐標(biāo)系位置為圖5中的紅色線。由于采樣更新延時,經(jīng)過Ts/N長的時間后,PWM占空比信號才更新,此時的同步旋轉(zhuǎn)坐標(biāo)系位置為圖5中的藍(lán)色線。在接下來的一個開關(guān)周期Ts內(nèi),占空比信號轉(zhuǎn)換為實(shí)際電壓發(fā)出。則在[t0+Ts/N,t0+Ts/N+Ts]時間段內(nèi),實(shí)際作用到同步旋轉(zhuǎn)坐標(biāo)系的坐標(biāo)軸上的電壓矢量與電壓指令之間有如下關(guān)系
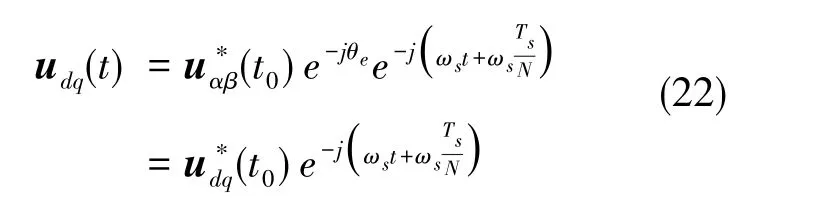
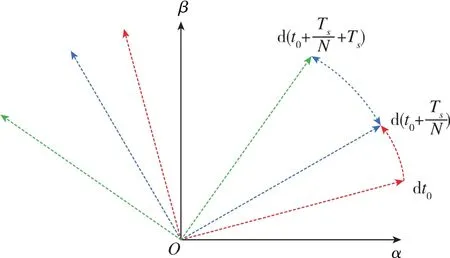
圖5 同步旋轉(zhuǎn)坐標(biāo)系示意圖Fig.5 Schematic diagram of synchronous rotation coordinate system
實(shí)際作用電壓的平均值可以由下式求得[13]
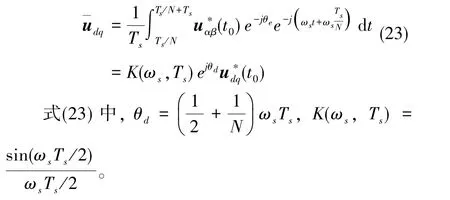
考慮到上述分析,實(shí)際作用到負(fù)載d軸、q軸上的電壓與指令電壓滿足
4 仿真驗(yàn)證
為了驗(yàn)證上述建立的系統(tǒng)理論模型的正確性,利用Matlab/Simulink建立三相對稱阻感負(fù)載電流環(huán)控制仿真。其中,仿真參數(shù)如表1所示。
表1 仿真參數(shù)設(shè)置Table 1 Setting of simulation parameters
0時刻給定d軸電流指令1A、q軸電流指令0A,給定輸出采樣重數(shù)N=2。 比較仿真負(fù)載輸出電流與理論模型的動態(tài)響應(yīng)過程,可以得到如圖6、圖7所示的仿真結(jié)果。
由圖6、圖7可知,理論波形與仿真波形基本吻合。圖6、圖7表明,本文所建立的多采樣率狀態(tài)空間模型是準(zhǔn)確的,能夠反映實(shí)際系統(tǒng)情況。
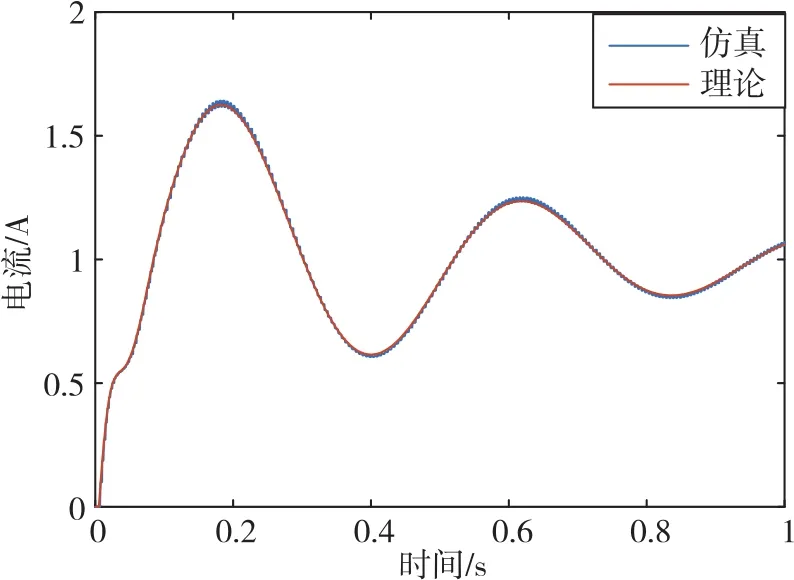
圖6 N=2時d軸的電流響應(yīng)圖Fig.6 Diagram of d-axis current response when N=2
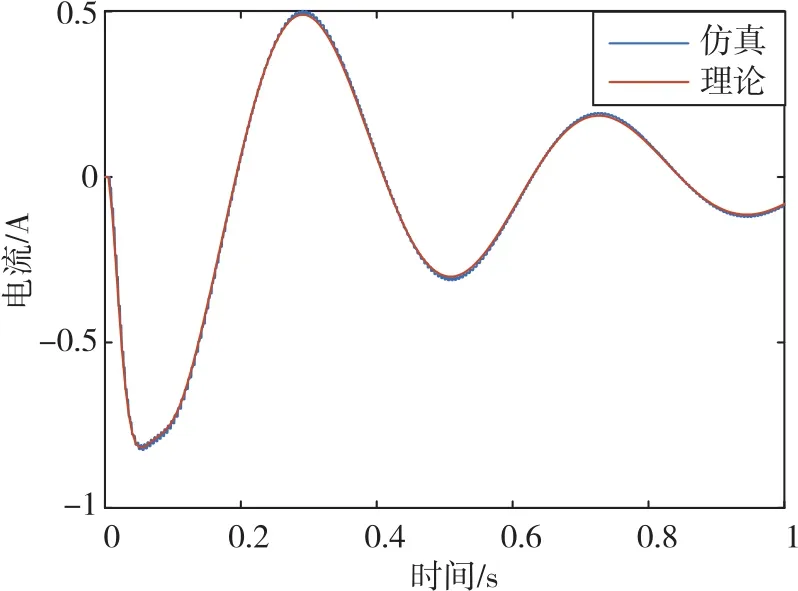
圖7 N=2時 q軸的電流響應(yīng)圖Fig.7 Diagram of q-axis current response when N=2
5 結(jié)論
針對多采樣率牽引傳動控制中的電流環(huán),本文詳細(xì)分析了多采樣率控制下電流環(huán)的結(jié)構(gòu)以及多采樣率下電流環(huán)數(shù)字延時與延時的影響,結(jié)合多采樣率 “提升”方法,建立了系統(tǒng)電流閉環(huán)的等效單采樣率狀態(tài)空間模型。最后,通過Matlab/Simulink仿真驗(yàn)證了本文所建立的數(shù)學(xué)模型的準(zhǔn)確性。仿真結(jié)果表明,本文所建立的多采樣率控制電流環(huán)數(shù)學(xué)模型是分析多采樣率問題的一種有效方法,為進(jìn)一步分析多采樣率系統(tǒng)奠定了基礎(chǔ)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19