基于熱點位置分類的電流互感器發熱故障判別方法
2022-01-11 06:38:24許志浩丁貴立趙天成
激光與紅外 2021年12期
許志浩,羅 呂,袁 剛,康 兵,丁貴立,趙天成
(1.南昌工程學院電氣工程學院,江西 南昌 330099;2.國網吉林省電力有限公司電力科學研究院,吉林 長春 130021)
1 引 言
當前,紅外熱像儀成為變電巡檢中必不可少的檢測工具,對變電設備的前期故障預測具有較大作用[1]。近年來,相關學者陸續提出了一些智能識別變電設備紅外圖像的方法[2-3],但對故障類型的識別研究較少。故障類型的判別是實現智能診斷的關鍵技術,也是影響相關研究者的典型問題之一。在人工智能技術和電力大數據背景下,從海量的紅外圖片中,選擇并提取關鍵特征數據進行故障類型分析和診斷已經成為趨勢,具有較好的研究價值和應用前景[4]。但是,變電設備紅外圖像表征出的熱故障特征復雜多樣,又因只有特征具有較強的描述性,利用人工智能算法才能夠實現故障類型的準確判別。因此,如何從紅外圖像的復雜多樣熱特征中,選擇并提取關鍵有效的特征,實現故障類型判別成為一大難題。
在現有的文獻中,對故障類型的判別方法非常少,特別是對電壓致熱型缺陷的判別幾乎沒有。現有的故障類型判別方法,主要采用人工標注的方式形成數據圖庫,輸入到深度學習算法中實現,例如文獻[5]通過標注出故障區域,依據故障區域的位置人為給定故障類型標簽,輸入到神經網絡中訓練,實現故障類型的判別。該方法存在兩個弊端:一是人工標注需要耗費大量的人力和時間;二是需要大量的故障樣本圖庫作為算法支撐,對數據的依賴性較大。因此,在故障圖譜數量有限的情況下,選擇并提取有效特征對設備的故障類型進行判別和描述勢在必行。文獻[6]~[15]選擇并提取變電設備紅外圖像中的像素溫度值及基于溫度矩陣的多維度特征值矩陣等信息,將其輸入到SVM和RVM分類器、SOM深度學習網絡中,實現變電設備的故障診斷。這些文獻中,雖然選擇并提取了一些熱故障特征對設備的故障狀態進行描述和判別,但是并未選擇出關鍵熱故障特征對設備的故障類型進行分析和研究。
由此可見,基于人工智能算法實現變電設備故障診斷的難點,關鍵在于選擇并提取的熱故障特征,能否把設備的故障類型精準的描述出來。為了解決這個問題,本文以電流互感器為例,提出了一種基于熱點位置分類的電流互感器發熱故障判別方法。在該方法中,首先運用CNN神經網絡和YOLO融合算法完成電流互感器零部件檢測。在此基礎上,以各部件檢測邊框中心點所構成的直線為縱坐標,設備高的一半作縱坐標垂線,記為橫坐標,以建立的二維坐標系作為參考基準;然后采用PCNN分層聚類迭代的方法分割故障區域,并采用灰度質心法獲取故障區域的熱點等效中心;最后選擇并提取熱點等效中心到坐標原點的距離、角度等參數來確定熱點位置,達到判別熱點位置屬于電流致熱型缺陷或電壓致熱型缺陷的分類目的,從而實現電流互感器故障類型的判別,本文工作流程圖如圖1所示。

圖1 本文工作流程圖Fig.1 The working flow chart of this paper
2 熱故障特征分析與選擇
據統計,電力系統中70 %的故障都是由變電設備的故障所導致[16],并且約50 %以上的變電設備在發生故障時,都會出現設備整體或部分區域的溫度異常升高[17]。常見的故障類型有電流致熱缺陷、電壓致熱型缺陷和綜合致熱型缺陷三種,其中,因接觸不良等導致的電流致熱型故障占所有故障比例高達90 %[18],雖然由于介損增大等導致的電壓致熱型故障占所有故障比例較小,但是當發生這類故障時,容易引起大面積發熱,導致損壞設備或造成大面積停電等后果。同時,故障點隨著位置信息的不同,所表征出來的故障特性也存在較大的差異。因此,選擇并提取故障點的位置信息等特征,進行變電設備熱故障分析和判別具有重要意義。本文在《DL/T664-2016帶電設備紅外診斷應用規范》[19]的基礎上,提出一種基于熱點位置分類的電流互感器發熱故障判別方法,該方法通過提取故障點的位置信息特征,用于輔助電流互感器設備故障類型精準判定。電流互感器故障類型診斷依據如表1所示。
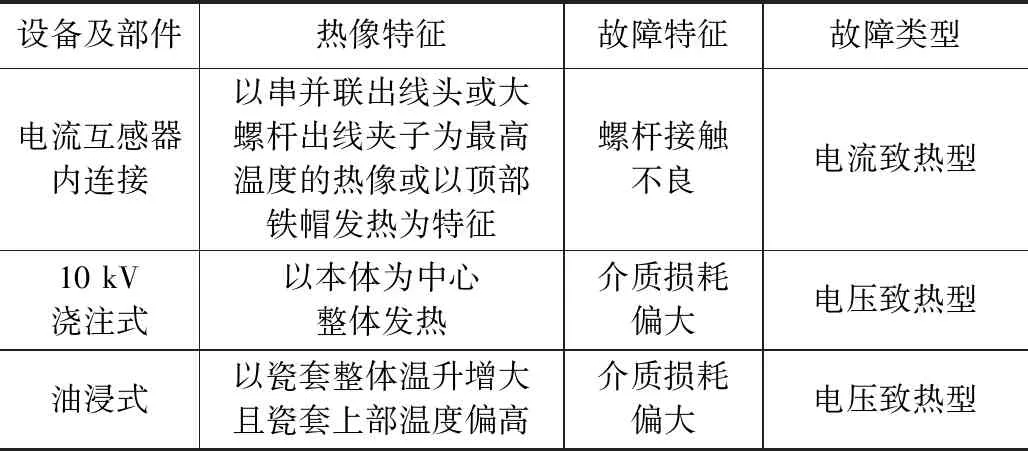
表1 電流互感器故障類型診斷判據Tab.1 Fault type diagnosis criteria of CT
3 電流互感器部件檢測及基準的建立
3.1 電流互感器部件檢測
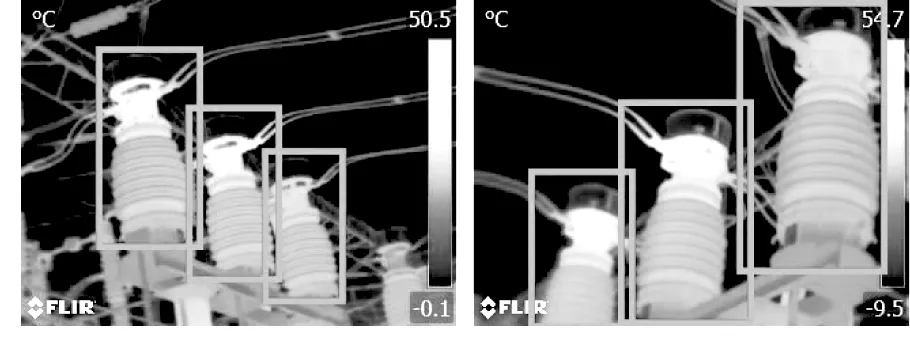
在變電站的復雜情況下拍攝紅外圖像,易受拍攝角度和拍攝環境等因素的限制,導致電流互感器在紅外圖像中呈現出大小不一、各式各樣傾斜角度和背景復雜多樣的情況。如圖2(a)和(b)所示比較正立的圖像非常少,對于這種簡單情景下,采用YOLO[20]、SSD[21]和Fast-RCNN[22]等常見的目標檢測算法,很容易獲取設備的位置和尺寸大小等信息,并取得良好的效果。但大多數都是如圖2(c)和(d)所示的復雜情況,如果采用常見的目標檢測垂直框來檢測設備,容易導致冗余的背景干擾信息和非必要的重疊,如圖3所示。

(a) (b)

(a) (b)

(a)正立紅外圖 (b)正立紅外圖
(a) (b)
針對該問題,文獻[23]中提出了一種基于深度卷積神經網CNN和YOLO算法來預測設備坐標及方向角等,該算法表現出了較好的性能。因此,本文運用該網絡模型實現電流互感器的部件檢測,效果如圖4所示。
3.2 建立位置分類信息提取基準
位置分類信息基準的建立,是基于采用文獻[23]中的網絡模型檢測出電流互感器零部件而實現的。此網絡模型以大小為416×416×3的紅外圖像作為輸入信息,輸入到網絡模型中圖像被劃分為S×S網格,各網格單元預測B邊界框,邊界框是由四條邊組成的矩形框,分別包住物體的四個邊界。每個盒子有5個參數描述坐標,一個置信值反映了盒子預測器的置信程度和K類概率值。所以,輸出是一個S×S×(B·(5+1+K))維張量。在預測各單元的B包圍盒時,采用錨盒方案。即是該網絡模型不是直接預測坐標,而是預測與錨箱相關的5個參數(tx,ty,tw,th,tθ),且該模型是使用K-means算法對B個錨盒進行聚類,也就是從訓練樣本中獲得B個不同大小的錨盒。假設單元格與圖像左上角的偏移量為(cx,cy),錨框的寬度和高度分別為wa和ha,再根據預測參數,計算出單元格中預測邊界框的坐標信息和方向角(x,y,w,h,θ),計算公式如下:
(1)
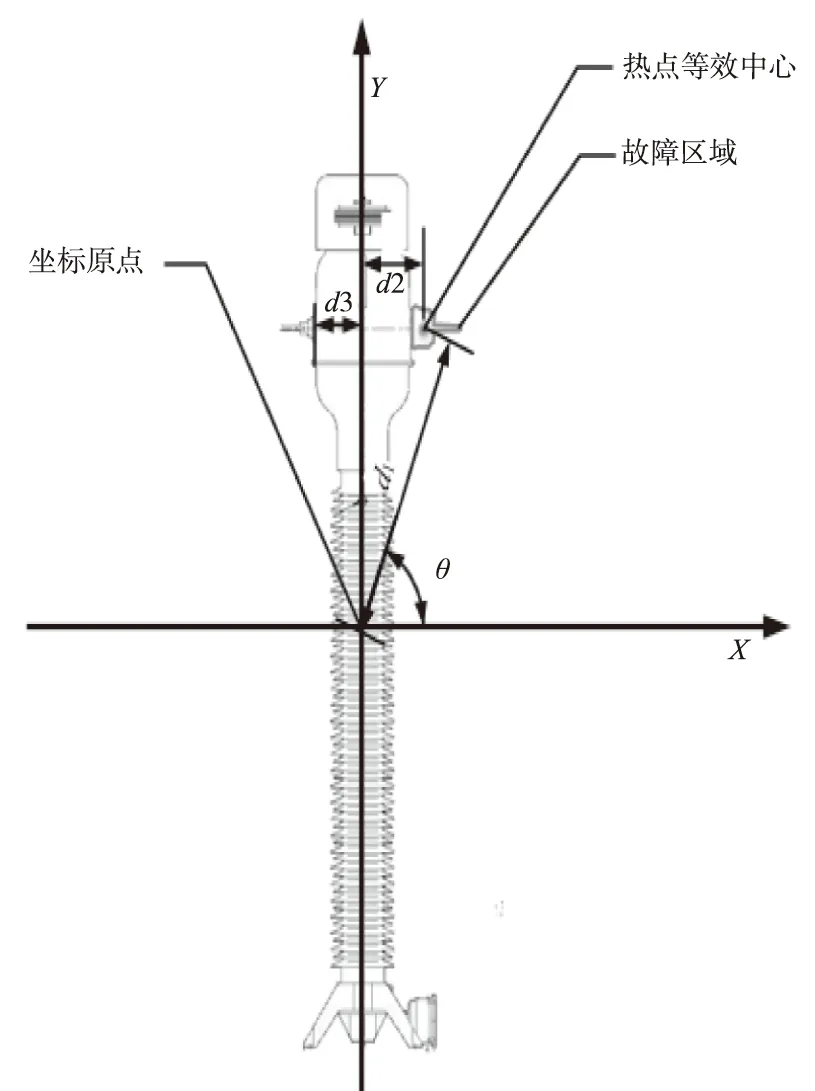
式中,σ(ti)是tx,ty在[0,1]中logistic函數的縮放比例,同時,在邊界框的(x,y,w,h,θ)參數中,(x,y)是邊界框的中心坐標,w和h是邊界框的寬與高。以兩個部件邊界框的中心坐標構成一條直線,將其記作縱坐標Y,以各部件邊框高的和的二分之一為分界點,作Y軸的垂直平分線,將其記作X軸,記坐標原點為(x0,y0)。以所建立的坐標系為基準,如圖5所示。可通過計算故障區域的熱點等效中心到坐標原點、橫軸X、縱軸Y的距離以及與X軸之間的夾角等參數,確定故障點的位置,實現電流互感器的位置分類信息特征提取,作為電流互感器故障類型分析判別的基礎。假設兩檢測邊界框的參數分別為(x11,y11,w11,h11,θ11)和(x12,y12,w12,h12,θ12),則兩個部件邊界框的中心坐標構成的直線和坐標原點可分別表示為式(2)和式(3):
(2)
(3)
4 提取熱點位置分類信息
熱點位置分類是選擇并提取熱點的位置信息,根據熱點位置信息判別熱點屬電流致熱型缺陷還是電壓型缺陷。其中,故障區域分割的準確性,直接影響熱點等效中心點的查找和定位,從而決定熱點位置分類信息提取精度。因此,故障區域分割是提取位置分類信息的關鍵。文獻[24]提出了一種基于PCNN分層聚類迭代的故障區域自動提取方法,具有較好的分割效果。因此,本文采用該方法對故障區域進行分割。又因坐標基準是針對設備本體建立的,為了使熱點等效中心的坐標信息與坐標軸的單位是統一量綱,通過3.1節識別獲取檢測框的頂點坐標信息,以頂點坐標為臨界點剪切出故障相后,再對故障區域進行分割。完成故障區域分割后,利用灰度質心法[25]獲取故障區域的熱點等效中心(x1,y1)。此時,設備中心點的橫坐標x0和縱坐標y0分別為剪切邊框寬和高的一半。以圖5為例,故障相和故障區域分割效果如圖6所示。灰度質心法公式為式(4):
(4)
式中,m×n為圖片分辨率大小,G(x,y)為各像素的灰度值,(x1,y1)為所求的灰度質心。

(a)故障相的分割
完成上述處理后,接著就是提取熱點位置信息,主要包括以下三個步驟:
步驟一:計算熱點等效中心到Y軸的距離d2與設備邊緣到Y軸距離d3的比值δ,判斷故障點處于設備本體內部還是外部,如式(5):
(5)
1)當δ>1,判定為本體外。
2)當δ≤1,判定為本體內。
步驟二:計算熱點等效中心到坐標原點(x0,y0)的距離d1及兩點構成的直線與X軸的夾角θ,如式(6),通過θ可以判斷出故障區域的象限位置,可分以下兩種情況分析:
(6)
當故障區域位于設備本體外部時。若0°<θ<90°,即故障位于坐標軸的第一象限,因只有接線端子位于設備本體外,則可以判斷故障位于設備右邊的接線端子上;若90°<θ<180°,即故障位于坐標軸的第二象限,則可以判斷故障位于設備左邊的接線端子上,從而可以判別出該電流互感器發生了電流致熱型缺陷。
當故障區域位于設備本體內部時。若0°<θ<180°,故障位于坐標軸的第一或第二象限;若180°<θ<360°,故障位于坐標軸的第三或第四象限。
因正切函數是周期為π的周期函數,只采用角度完成故障點所在象限的定位存在不確定性,而通過第4節中剪切出故障相后,故障區域熱點中心和坐標原點的量綱具有一致性。因此,本文為了更加精準的定位故障點的象限位置,運用角度、故障區域熱點中心與坐標原點的坐標值對比分析實現。包括以下四種情況:
若x1>x0且y1 2)若x1 3)若x1 4)若x1>x0且y1>y0,則熱點位于第四象限。 步驟三:通過上述判據確定熱點處于設備內部還是外部以及象限位置后,再結合電流互感器故障類型診斷的依據和故障區域熱點等效中心偏離坐標原點的程度d1,進一步定位和判斷故障位置,從而實現故障類型的判別,如式(7)。故障類型的判別算法流程圖和位置信息各參數效果分別如圖7和如圖8所示。 圖7 故障類型的判別算法流程Fig.7 Fault type discrimination algorithm flow 圖8 位置信息參數示意圖Fig.8 Schematic diagram of location information parameters (7) 為了驗證本文提出方法的可行性,以50張電流互感器紅外故障圖像為例,對其進行算法試驗。運用第4節中提取熱點位置分類信息方法,得到50組電流互感器的位置信息參數及判別結果如表2所示。 表2 提取的位置信息參數及判別結果Tab.2 Extraction of location information parameters and discrimination results 詳細分析以圖5中電流互感器為例,表2中前4個分別是圖5(a)、圖5(b)、圖5(c)、圖5(d)四個電流互感器提取的結果。通過FLIR Tool工具進行故障分析,可得出圖5(a)和圖5(b)的故障相均發生在中間相;圖5(c)和圖5(d)的故障相分別發生在從左到右的第三相和第一相。由表2可以看出,(a)、(b)、(c)三個圖的δ比值均大于1,判定為本體外;(d)圖的δ比值小于1,判定為本體內。運用(6)式可以得到θ分別為60.4°、69.4°、57.7°和-46.9°,結合對比故障區域熱點中心和坐標原點的坐標值及正弦函數的圖像和性質,同時,通過分析可知圖5(b)故障點位于設備外端且在第二象限,由第4節可得圖5(b)的實際熱點等效中心為(14.91,25.68),則可得到最終的θ分別為-119.86°、69.4°、-122.33°和-46.9°。因此,可以得出: 圖5(a)、圖5(b)和圖5(c)中電流互感器的故障分別發生在偏離坐標原點38個像素點的第二象限、偏離坐標原點31個像素點的第一象限和偏離坐標原點37個像素點的第一象限,且均位于設備本體外,因只有接線端子位于設備本體外,則可以判別出圖5(a)、5(b)、5(c)故障分別發生在電流互感器的左接線端子、右接線端子和左接線端子上,根據圖9中的故障類型判別依據,可以得出,圖5(a)、5(b)、5(c)三個電流互感器均發生了電流致熱型缺陷。 2) 圖5(d)中電流互感器的故障發生在偏離坐標原點71個像素點的第三象限,且位于設備本體內,又因電流互感器套管部分的高度往往是大于其余部分高度和,所以位于三、四象限的部分一般都是套管,結合圖8中的判據即可得出,圖5(d)中的電流互感器發生了電壓致熱型缺陷。 本文首次提出了一種基于熱點位置分類的電流互感器發熱故障判別方法。該方法中,首先運用CNN神經網絡和YOLO融合算法完成電流互感器零部件檢測,在此基礎上,以各部件檢測邊框中心點所構成的直線為縱坐標,設備高的一半作縱坐標垂線,建立二維坐標系作為參考基準;然后在運用剪切的方法將故障相分離出來的情況下,利用PCNN分層聚類迭代的方法分割故障區域,并利用灰度質心法獲取故障區域的熱點等效中心;最后選擇并提取熱點等效中心到坐標原點的距離、角度等參數,并采用這些參數判別熱點位置的故障類別屬性,從而實現電流互感器故障類型判別。以50張電流互感器紅外故障圖像為例,對本文的方法與依據表1判據人工診斷的方法進行對比分析,結果表明,該判別方法準確率高達92 %,具有一定的實用性,可較好的推廣到其他變電設備故障判別中。
5 實驗結果與分析

6 結 論
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28汽車維修與保養(2019年7期)2020-01-06 03:30:42電子制作(2018年11期)2018-08-04 03:26:08中華手工(2017年2期)2017-06-06 23:00:31汽車維護與修理(2016年10期)2016-07-10 08:17:41工業設計(2016年12期)2016-04-16 02:52:00汽車維修與保養(2015年6期)2015-04-17 03:31:50汽車維護與修理(2015年2期)2015-02-28 12:15:39中外會展(2014年4期)2014-11-27 07:46:46消費者報道(2014年7期)2014-07-31 11:23:57