基于無跡粒子濾波算法的航空發(fā)動機排氣溫度預測
2022-01-07 06:16:44劉利軍
航空發(fā)動機 2021年6期
余 臻 ,劉 洋 ,魏 芳 ,劉利軍 ,
(1.廈門大學航空航天學院,福建廈門 361005;2.中國航發(fā)商用航空發(fā)動機有限責任公司,上海 200241;3.中國船舶航海保障技術重點實驗室,天津 300450)
0 引言
航空發(fā)動機的工作環(huán)境惡劣,多為高溫、高腐蝕、高轉速條件,其安全工作壽命難以準確得知[1]。發(fā)動機性能指標包括排氣溫度裕度(Exhaust Gas Temperature Margin,EGTM)、高壓壓氣機轉子角速度偏差量(Delta N2,DN2)、平均滑油消耗率(Average Oil Consumption,AOC)等,其中EGTM 是最重要的指標之一,是發(fā)動機在海平面壓力、拐點溫度條件下全功率起飛時,排氣溫度與標準規(guī)定的排氣溫度紅線值之間的差值。隨著發(fā)動機飛行循環(huán)數(shù)的增加,發(fā)動機各零部件磨損老化程度增加,排氣溫度持續(xù)升高,使得EGTM值逐漸降低,達到標準規(guī)定的EGTM閾值。
在20世紀90年代初建立的基于發(fā)動機性能參數(shù)的性能衰退失效分析方法,為高可靠性設備的可靠性分析提供了新的分析方法。Gertsbackh 等[2]率先提出基于性能退化數(shù)據(jù)的設備可靠性模型的預測方法;Nelson[3]發(fā)現(xiàn)發(fā)動機部件的失效特性會在發(fā)動機衰退信息中有所體現(xiàn),這些信息能具體反映出零部件的衰退狀態(tài);Meeker 等[4]利用退化失效模型解決了傳統(tǒng)可靠性理論無法很好處理的一些實際問題;Wu 等[5]基于數(shù)據(jù)驅動的退化量統(tǒng)計模型,采用模糊聚類方法研究了零部件退化失效分布。隨著發(fā)動機制造技術的進步,發(fā)動機可靠度提高,發(fā)動機失效數(shù)據(jù)大大減少,使得樣本數(shù)量減少。Erto[6]利用發(fā)動機零部件常見的先驗信息,分別對經(jīng)典的概率分布模型進行分析,對參數(shù)進行了估計;Cox[7]給出了針對單系統(tǒng)的剩余壽命分布的混合估計方法;王鑫等[8]提出了LSTM 預測模型參數(shù)優(yōu)選算法,提高了對故障時間序列預測的準確度;張營等[9]在過程神經(jīng)網(wǎng)絡的基礎上提出了優(yōu)化算法,結合混沌粒子群算法對發(fā)動機的排氣溫度進行預測,獲得較高的預測精度。
發(fā)動機的性能衰退主要表現(xiàn)為其性能衰退參數(shù)值呈非線性減小趨勢[10-11],可采用能夠處理非線性時間序列的方法進行預測。
本文提出了一種基于粒子濾波[12-14](Particle Filter,PF)的航空發(fā)動機剩余大修壽命預測方法。提出的無跡粒子濾波(Unscented Particle Filter,UPF)算法首次應用在航空發(fā)動機EGTM 預測領域,UPF 以無跡卡爾曼濾波(Unscented Kalman Filter,UKF)的結果作為建議分布[15],引入最新觀測值進行預測修正。
1 無跡粒子濾波算法
粒子濾波基于蒙特卡羅和遞歸貝葉斯濾波方法[16]。為了解決粒子權重差異大的問題,有2 種策略,即重采樣和選擇合理的建議分布[17]。重采樣會導致粒子貧化,選擇合理的建議分布是解決退化問題的較優(yōu)選擇。
粒子濾波是由表示未知狀態(tài)空間的采樣值的1組粒子的近似。目前,粒子濾波已經(jīng)成為了解決非線性、非高斯系統(tǒng)參數(shù)估計和狀態(tài)濾波問題的主流方法。
1.1 粒子濾波框架
對于航空發(fā)動機EGTM 預測,可以用如下的數(shù)學狀態(tài)空間方程來表示。
系統(tǒng)狀態(tài)方程

系統(tǒng)觀測方程

式中:xt∈Rn,為系統(tǒng)的狀態(tài)變量;yt∈Rnz,為系統(tǒng)在t時刻的測量值;ft為通過上一時刻的狀態(tài)值預測下一時刻狀態(tài)值的函數(shù);ht為通過當前時刻狀態(tài)值預測輸出值的函數(shù);mt、nt分別為系統(tǒng)的過程噪聲和觀測噪聲,二者之間相互獨立。
貝葉斯濾波包含預測和更新2 部分。預測部分是利用系統(tǒng)的狀態(tài)方程,在系統(tǒng)測量值未知的前提下,預測狀態(tài)的先驗概率密度

而更新部分則是在已經(jīng)得到最新的觀測值yt的條件下,對先驗的概率分布進行修正,得到xt的后驗概率

對于一般高階非線性、非高斯過程,式(4)難以求解。所以粒子濾波采用蒙特卡洛采樣來避免積分難的問題。利用一系列從已知分布采樣的粒子來估計后驗概率

式中:δ()為狄拉克函數(shù);N為粒子個數(shù);i為粒子序號。在得到后驗概率后,當前時刻的后驗期望值為。
然而,因為無法獲知真實的狀態(tài)后驗概率,所以如果需要通過后驗概率來獲取粒子分布,則需要從1個已知分布q(x|y)中采樣得到粒子


上述粒子權重的計算采用直接計算方式,每進行1 次迭代就需要重新計算,效率低。所以需要重新對權重公式進行遞推


至此描述了完整的粒子濾波算法。從上述算法得知,建議分布q(xt|y1:t)的選取對于算法的效果非常重要。上述涉及到建議分布的內(nèi)容主要包含2 部分:一部分是粒子是從建議分布中選取的,另一部分是粒子的權重計算需要用到建議分布。同時可知,當建議分布選取為系統(tǒng)先驗分布p(xt|xt-1)時,權重的計算復雜度會大幅降低,即為

這極大地促進了粒子濾波的實際應用。但粒子濾波在易于實現(xiàn)的同時也會導致其他后果:(1)導致了更高階的蒙特卡洛協(xié)方差,進而使預測效果變差;(2)使用先驗概率作為建議分布之后,忽略了最新的系統(tǒng)觀測值,可能導致粒子嚴重退化,即大多數(shù)粒子的權值都趨近于0,尤其是在似然函數(shù)達到峰值而預測的狀態(tài)卻在似然函數(shù)的邊緣時。建議分布的取值在理論上有無窮多種可能性,但是最優(yōu)的分布-權值的方差最小,即使存在,求解也十分困難。因此,選擇1 個合理的建議分布,對于避免粒子退化、得到良好的濾波結果具有深刻意義。
1.2 無跡粒子濾波算法
上文已經(jīng)指出了使用先驗概率作為建議分布會導致系統(tǒng)缺陷,而改進建議分布最明顯的方法是納入當前觀測的數(shù)據(jù)。于是學者設計出很多的卡爾曼濾波器來改進建議分布[18],但是這些濾波器的表現(xiàn)多基于各自不同的近似假設。迄今為止,無跡卡爾曼濾波器是針對非線性系統(tǒng)表現(xiàn)最為優(yōu)秀的卡爾曼濾波器。通過采用無跡卡爾曼濾波器產(chǎn)生合適的建議分布,可以將通用粒子濾波轉化成高性能無跡粒子濾波。下文將討論無跡卡爾曼濾波的基礎——無跡變換,并且給出完整的無跡粒子濾波算法。
在許多現(xiàn)實應用中,都需要估計經(jīng)過非線性變換y=g(x)的隨機變量的低階統(tǒng)計量,例如均值和協(xié)方差。無跡變換能夠準確地計算出g(x)的泰勒級數(shù)展開不超過2階的均值和方差。
假定n為系統(tǒng)變量x的維度,x的均值為,方差為Px,則通過無跡變換計算得到y(tǒng)=g(x)的均值和方差。
(1)確定2n+1個sigma點Si={Xi,Wi}。
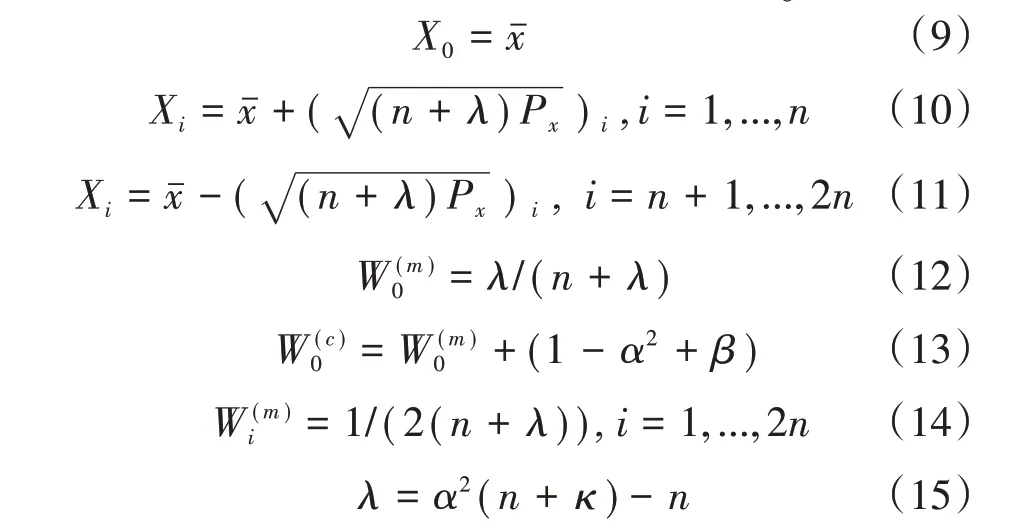
式中:κ為尺度參數(shù),用來控制sigma 點與均值的距離;α為正的尺度參數(shù),用以控制來自非線性函數(shù)g(x)的更高階部分的影響;β為用來控制初始的sigma點權重的參數(shù)。
縱觀現(xiàn)有的研究仍然存在著研究視角單一,對于組織邊界、組織域的關注較少,缺乏對于組織機制及運作邏輯的結構性分析和建構過程的討論。對于體育社會組織的制度約束、資源困境等關注過多,忽視了對于包括文化傳統(tǒng)、道德習俗等非正式制度對于組織運作機制的形塑過程的分析,缺乏對于中國傳統(tǒng)社會“合群立會”等歷史視角的社會學想象力。從研究方法上看,個案研究過多,定量研究較少,從理論的解釋力來看,理論與經(jīng)驗的不匹配、理論和方法背后的邏輯推演的不清晰,引進的西方理論的適用性等問題仍存在于目前的研究當中。
對于標量情況來說,最優(yōu)值為α=0,β=0,κ=2。請注意,在計算平均值和協(xié)方差時,初始的sigma點的權重是不同的。
(2)通過非線性函數(shù)傳播sigma點。

(3)計算y的均值和方差。
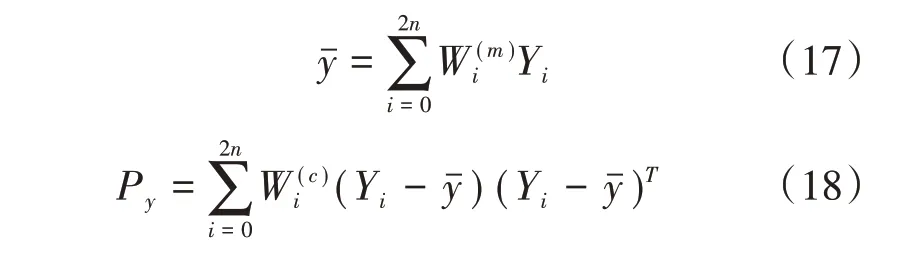
保證y的均值和協(xié)方差精確到泰勒級數(shù)2階展開。
無跡卡爾曼濾波可以通過擴展狀態(tài)空間以包含噪聲分量來實現(xiàn),即。而Na=Nx+Nm+Nn則是擴展之后的狀態(tài)空間的維度,其中Nm和Nn是噪聲mt和nt的維度,Q和R則是噪聲mt和nt的協(xié)方差。整個UKF過程如下。
(1)初始化。

(2)按時間迭代。
a.用上述過程計算sigma點。

b.時間更新。
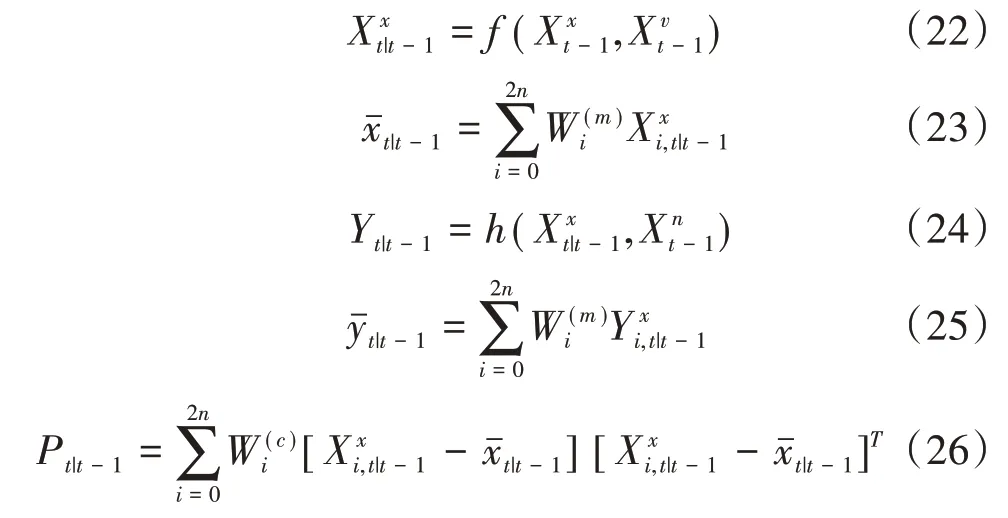
c.測量更新。

UKF 為2 階近似,所以在準確度上要勝過1 階近似的擴展卡爾曼濾波器(Extended Kalman Filter,EKF),而且在計算效率上同樣優(yōu)于EKF,因為UKF不需要計算雅克比矩陣和海森矩陣。
至此已討論傳統(tǒng)的粒子濾波及其不足之處,隨后引入了無跡卡爾曼濾波。然而,無跡卡爾曼濾波對狀態(tài)分布做了高斯假設。另外,對于粒子濾波,可以對任意分布進行建模,但是將新的觀測加入到建議分布中并不容易。本文提出了改進辦法,在航空發(fā)動機領域,利用UKF 來為粒子濾波生成建議分布,引進最新的觀察來更新狀態(tài)估計,即為無跡粒子濾波。對于每個粒子的取值概率分布明確為

值得注意的是,即使在估計后驗分布p(xt|xt-1,y0:t)時高斯分布假設是不現(xiàn)實的,但對于每個粒子都有1個不同的均值和方差都不是問題。而且,使用UKF得到的均值和方差均達到2 階展開,所以系統(tǒng)的非線性特性得以保存。將式(32)代入到傳統(tǒng)粒子濾波算法中,即可得到UPF。完整的預測步驟如下。
(1)利 用式(21)~(31)的UKF 算法 來更 新,i=1,...,N,得到粒子的均值和協(xié)方差。
(3)利用式(5)計算出各粒子的權重。
(4)利用式(6)來歸一化權重。
(5)計算有效的粒子規(guī)模大小S。
(6)如果有效粒子數(shù)少于有效數(shù)閾值,則對應生成N個等權粒子。
(7)利用式(7)來計算系統(tǒng)狀態(tài)后驗分布的期望值。xt的條件均值可以通過xt+1=f(xt)計算得到,而xt的協(xié)方差可以通過計算得到。可以使用計算得到的條件均值和協(xié)方差來得到發(fā)動機當前時刻排氣溫度的概率密度分布[19-21]。UPF 的流程如圖1所示。

圖1 UPF的流程
2 EGTM的預測算法及實現(xiàn)
2.1 EGTM預測過程
系統(tǒng)的測量方程和狀態(tài)方程為

式中:a,b,c均為系數(shù)。

式(34)中的yt即為t時刻系統(tǒng)的觀測值,是航空發(fā)動機EGT 的測量值與EGT 紅線值的正差值,系統(tǒng)噪聲和測量噪聲均假定遵循高斯分布。根據(jù)粒子濾波方法,EGTM值估計為

所以在t時刻的p步預測表示為

EGTM的后驗概率密度為

當設定的EGTM 閾值為Y時,達到閾值的循環(huán)為L,則

所以在t時刻預測發(fā)動機在現(xiàn)有EGTM 條件下得到循環(huán)閾值的概率密度分布為

2.2 仿真結果分析
在本次仿真試驗中,每次迭代中所取的粒子數(shù)均為100。采用無跡粒子濾波方法在18 和30 循環(huán)處對數(shù)據(jù)進行預測,狀態(tài)方程的參數(shù)見表1。

表1 根據(jù)歷史數(shù)據(jù)得到的狀態(tài)方程參數(shù)
35 循環(huán)處傳統(tǒng)粒子濾波方法的預測結果如圖2所示。

圖2 傳統(tǒng)粒子濾波在35循環(huán)處的預測
由于沒有考慮到最新的觀測值,采用傳統(tǒng)粒子濾波方法得到的數(shù)據(jù)與真實的發(fā)動機水洗循環(huán)數(shù)相差較多,預測概率密度是假定閾值為50 ℃時的數(shù)據(jù),而當閾值為35 ℃時,預測的循環(huán)數(shù)在120 循環(huán)之后,與實際值相差較多。
在18 循環(huán)時刻的無跡粒子濾波預測結果如圖3所示。

圖3 無跡粒子濾波在18循環(huán)處的預測
前18 循環(huán)的航空發(fā)動機EGTM 實際數(shù)據(jù)將用來更新模型。從圖中可見,在達到閾值35 ℃時,預測的最終循環(huán)數(shù)為60,而實際的飛行循環(huán)數(shù)為59,預測誤差為1 循環(huán),同時預測的EGTM 在閾值時的循環(huán)數(shù)的寬度為16。
前30 循環(huán)的發(fā)動機EGTM 實際數(shù)據(jù)將用來更新模型,如圖4 所示。在達到閾值35 ℃時,預測的最終循環(huán)數(shù)為59,而實際的飛行循環(huán)數(shù)為59,預測誤差為0 循環(huán),同時預測的EGTM 在閾值時的循環(huán)數(shù)的寬度為7。從上述試驗結果可見,因為有更多的實際數(shù)據(jù)用以更新模型,所以模型的準確度得到了提升,模型的擬合優(yōu)度統(tǒng)計見表2。預測的循環(huán)數(shù)的寬度收窄了,說明預測的精度更高了。

圖4 無跡粒子濾波在30循環(huán)處的預測

表2 擬合優(yōu)度統(tǒng)計
3 結束語
隨著民航產(chǎn)業(yè)的飛速發(fā)展,做好航空發(fā)動機性能衰退預測,對于發(fā)動機有效及時恢復性能和節(jié)約成本具有重要意義。針對發(fā)動機領域的特點,本文所提出的無跡粒子濾波算法作為一種改進的粒子濾波方法,充分利用了最新觀測數(shù)據(jù)對系統(tǒng)模型進行修正,也降低了重采樣對樣本貧化的影響。因此,該方法不僅有抑制粒子退化的優(yōu)點,而且在一定程度上保持了粒子的多樣性。通過對無跡粒子濾波預測結果和傳統(tǒng)粒子濾波計算結果的比較研究可知,無跡粒子濾波方法在預測的準確度(均值與真實值的接近程度)和預測的置信度(概率密度分布的狹窄程度)上都顯示出巨大的優(yōu)勢。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
汽車與新動力(2015年1期)2015-02-27 12:11:01
電子設計工程(2015年13期)2015-02-27 12:06:43
汽車與新動力(2014年2期)2014-02-27 12:10:15