自平衡獨(dú)輪滑板車的動(dòng)力學(xué)分析
2021-12-31 07:47:58劉延柱
力學(xué)與實(shí)踐 2021年6期
劉延柱
(上海交通大學(xué)工程力學(xué)系,上海 200240)
自2008 年北京奧運(yùn)會上自平衡的賽格威車首次亮相以來[1],2015 年出現(xiàn)了賽格威車縮小版的自平衡雙輪滑板車[2]。與此同時(shí),又有構(gòu)造更簡單的稱為“Onewheel” 的自平衡獨(dú)輪滑板車問世(圖1)[3]。這種新型的代步工具只有一個(gè)輪子,僅依靠駕車人的身體動(dòng)作就能實(shí)現(xiàn)加速、減速和轉(zhuǎn)彎等各種功能。雖然操縱難度比雙輪滑板車更大,需要掌握更多技巧才能熟練駕駛,但騎手能感受到自由飛翔般地飄浮感覺,因而備受年輕人的青睞。各種新設(shè)計(jì)和產(chǎn)品不斷涌現(xiàn),促使自平衡滑板車的技術(shù)和產(chǎn)業(yè)在國內(nèi)快速發(fā)展。
圖1 自平衡獨(dú)輪滑板車和騎手
自平衡滑板車的出現(xiàn)為力學(xué)科普提供了一個(gè)有趣的課題。重心高高在上的騎手如同一只倒置的復(fù)擺,穩(wěn)定的自平衡是如何實(shí)現(xiàn)的?根據(jù)經(jīng)典力學(xué)的基本原理,任何系統(tǒng)的運(yùn)動(dòng)狀態(tài)只能依靠外力的作用改變。自平衡滑板車僅靠駕車人扭動(dòng)身體就能改變運(yùn)動(dòng)狀態(tài)應(yīng)如何解釋?獨(dú)輪車與地面只有一個(gè)點(diǎn)接觸,約束力不能形成繞垂直軸的力矩,轉(zhuǎn)彎的動(dòng)力從何而來?就上述問題本文討論自平衡獨(dú)輪滑板車的動(dòng)力學(xué)原理。忽略騎手肢體動(dòng)作引起的質(zhì)量變化,將車架加騎手視為剛體,與車輪組成雙剛體系統(tǒng)。設(shè)車輪相對地面做純滾動(dòng),滑板車的運(yùn)動(dòng)被歸結(jié)為非完整約束條件下雙剛體系統(tǒng)的動(dòng)力學(xué)問題。
自平衡獨(dú)輪滑板車的構(gòu)造十分簡單。在鋼制框架的中心用軸承安裝一只粗壯的橡膠輪,前后各裝有一片木踏板(圖2)。騎手跨立在車輪前后兩側(cè),通過重心移動(dòng)改變足底對前板或后板的壓力。板內(nèi)安裝的加速度計(jì)將測出的信息通過控制系統(tǒng)傳輸至驅(qū)動(dòng)電機(jī),以控制車輪的加速或減速。

圖2 自平衡獨(dú)輪滑板車
需要轉(zhuǎn)彎時(shí),與駕馭滑雪板或沖浪板的方法類似,駕車人帶動(dòng)車體向要轉(zhuǎn)彎的一側(cè)傾斜。利用與自行車類似的“離心力效應(yīng)”和“陀螺效應(yīng)”,傾斜車體的重力與支承力構(gòu)成力偶,使旋轉(zhuǎn)中的車輪進(jìn)動(dòng),出現(xiàn)繞垂直軸的轉(zhuǎn)動(dòng)。由此產(chǎn)生的陀螺力矩與重力矩平衡[4]。車體繞垂直軸的轉(zhuǎn)動(dòng)使直線軌道發(fā)生偏轉(zhuǎn),從而實(shí)現(xiàn)轉(zhuǎn)彎動(dòng)作。沿曲線軌道行進(jìn)的車體和人體產(chǎn)生離心慣性力,使駕車人恢復(fù)直立姿態(tài)避免摔倒。獨(dú)輪滑板車厚重車輪的動(dòng)量矩明顯大于自行車的前輪,陀螺效應(yīng)也更為明顯。
將車架和固定在車架上的騎手作為剛體B0,車輪作為剛體B1。獨(dú)輪滑板車是由B0和B1以圓柱鉸連接組成的雙剛體系統(tǒng){B}(圖3),其中,R為車輪半徑,B1與地面的接觸點(diǎn)記為P。將車輪不轉(zhuǎn)時(shí){B}固結(jié)成的剛體記作B*。以B*的質(zhì)心Oc為原點(diǎn),建立平動(dòng)參考坐標(biāo)系(Oc-XY Z),X和Y軸與地面平行,Z軸為垂直軸。設(shè)(Oc-XY Z)繞垂直軸轉(zhuǎn)過φ角的位置為(Oc-x0y0z0),x0軸為車輪的前進(jìn)方向。繼續(xù)繞x0軸轉(zhuǎn)過ψ角為(Oc-x1y1z1),y1軸為車輪的旋轉(zhuǎn)軸。最終(Oc-x1y1z1) 繞y1軸轉(zhuǎn)過θ角為剛體B*的主軸坐標(biāo)系(Oc-xyz),z軸沿騎手身體的縱軸(圖4)。
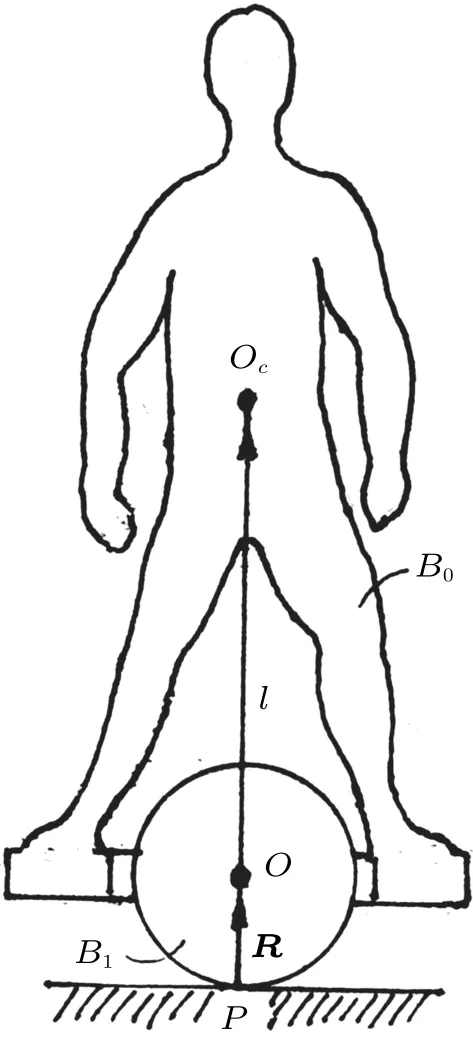
圖3 雙剛體系統(tǒng)
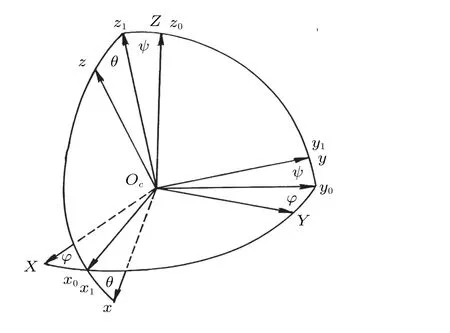
圖4 參考坐標(biāo)系
以騎手在車板上直立,滑板車勻速直線前行作為穩(wěn)態(tài)運(yùn)動(dòng)。即φ=θ=ψ=0,Ω=Ω0,質(zhì)心速度vcx=RΩ0,vcy= 0。其中Ω為轉(zhuǎn)速,Ω0為穩(wěn)態(tài)轉(zhuǎn)速。騎手利用身體向前或向后的傾斜動(dòng)作控制車速。當(dāng)騎手向前傾斜時(shí),因重力對前板的壓力大于后板,使車板產(chǎn)生角加速度¨θ。安裝在車板內(nèi)的加速度計(jì)將測出的¨θ信息輸入控制系統(tǒng),積分后轉(zhuǎn)換為轉(zhuǎn)角θ和角速度˙θ信息,控制驅(qū)動(dòng)力矩使車輪加速。如向后傾斜則控制力矩方向相反,車輪減速。即使在穩(wěn)態(tài)行進(jìn)過程中,若騎手因擾動(dòng)向前傾斜,車體會自動(dòng)加速,產(chǎn)生向后的慣性力使騎手恢復(fù)原位。向后傾斜則減速產(chǎn)生向前的慣性力。因此這種速度控制系統(tǒng)也是騎手站立穩(wěn)定性的根本保證。
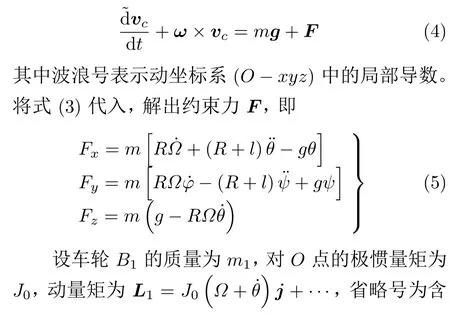
僅保留小量φ,θ,ψ及其導(dǎo)數(shù)的一次項(xiàng),設(shè)i,j,k為x,y,z各軸的基矢量,B*的角速度為ω= ˙ψi+ ˙θj+ ˙φk。設(shè)B1相對B*的旋轉(zhuǎn)速度為Ω=Ωj,從B1的質(zhì)心即輪心O至B*的質(zhì)心Oc引矢徑l=lk,從B1與地面的接觸點(diǎn)P至輪心O引矢徑R=Rk(圖3)。設(shè)Oc的速度為vc=vcxi+vcyj+vczk,則P點(diǎn)的速度為vP=vc+(R+l)×ω+R×Ω,導(dǎo)出

將參考坐標(biāo)系的原點(diǎn)Oc移至輪心O,設(shè){B}的質(zhì)量為m,以(O-xyz)為參考坐標(biāo)系,列寫{B}在重力mg和約束力F作用下的質(zhì)心運(yùn)動(dòng)方程
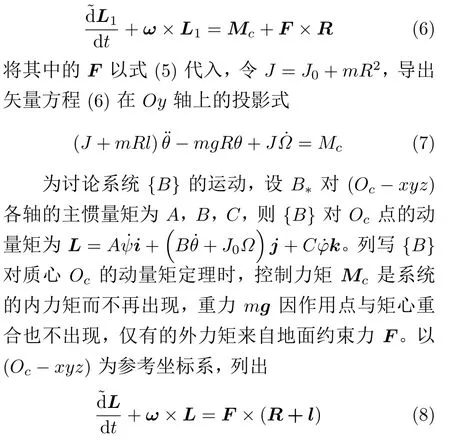
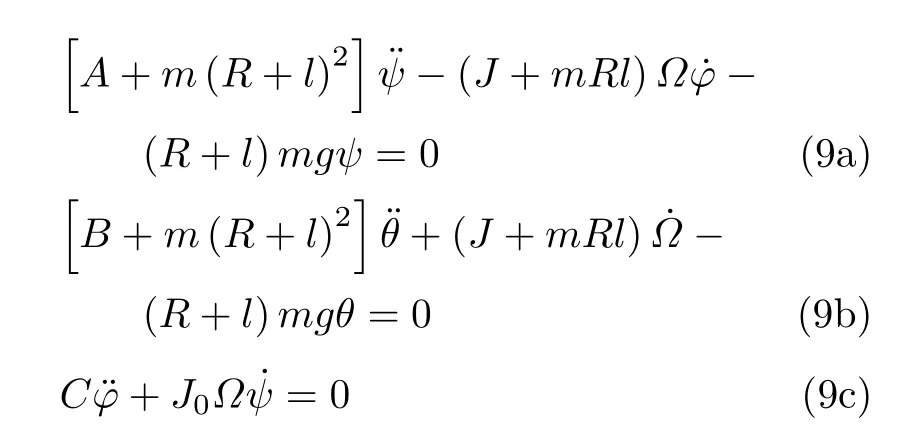
將式(8) 中的F以式(5) 代入,向(Oc-xyz) 各軸投影,得到
若不加控制,令式(9b) 中 ˙Ω= 0,則成為倒置的復(fù)擺方程,θ=0 為不穩(wěn)定的直立狀態(tài)。若施加控制,采用與θ成比例的最簡單的控制方案

將車輪視為均質(zhì)圓盤,令J0=m1R2/2,則J=m*R2,m*=m+(m1/2),引入α=ml/(m*R)。將式(12) 中¨θ的系數(shù)中帶負(fù)號部分化作

因m >>m1,m*與m接近,若將式(13) 右項(xiàng)的分子和分母中的m*均以m近似代替,則化作m(R+l)2。可推知式(12) 中¨θ的系數(shù)近似等于B。方程(12) 的特征方程為

若令控制系數(shù)k滿足

則特征根為純虛數(shù),θ=0 為穩(wěn)定平衡,證明騎手的直立狀態(tài)對前后側(cè)擾動(dòng)保持穩(wěn)定。但根據(jù)運(yùn)動(dòng)穩(wěn)定性的一次近似理論,線性系統(tǒng)的特征根實(shí)部為零屬于臨界情形,只能判定線性系統(tǒng)的零解穩(wěn)定,而不能判斷未經(jīng)線性化的原系統(tǒng)的穩(wěn)定性[5]。
為提高控制過程的靈敏性和穩(wěn)定性,可在簡單控制規(guī)律(10) 中增加隨˙θ變化的因素,變?yōu)?/p>

則方程(12) 中應(yīng)增加一項(xiàng)k1(1+α) ˙θ,特征方程變?yōu)?/p>

因特征根的實(shí)部均為負(fù)數(shù),根據(jù)李雅普諾夫一次近似穩(wěn)定性理論,此線性系統(tǒng)的零解變?yōu)闈u近穩(wěn)定,且能判定原系統(tǒng)的零解亦漸近穩(wěn)定。
對滑板車變向和轉(zhuǎn)彎的解釋須利用方程 (9a)和(9c)。設(shè)車輪轉(zhuǎn)速在轉(zhuǎn)彎過程中維持常值Ω0不變。當(dāng)騎手開始向右側(cè)傾斜時(shí),尚未變向的車體仍維持短暫的 ˙φ=0。方程(9a) 成為以ψ為變量的倒置復(fù)擺的動(dòng)力學(xué)方程。重力導(dǎo)致的傾覆角加速度 ¨ψ從零開始按指數(shù)規(guī)律增長。當(dāng)增長至有角速度 ˙ψ出現(xiàn)時(shí),引起車輪的動(dòng)量矩矢量L1進(jìn)動(dòng),產(chǎn)生陀螺力矩JΩ0˙ψ。依據(jù)方程(9c),車體出現(xiàn)繞z軸的角加速度¨φ,使前進(jìn)方向發(fā)生改變趨勢。所產(chǎn)生的慣性力矩C¨φ與車輪的陀螺力矩平衡。當(dāng)角加速度¨φ隨時(shí)間積累到有φ角出現(xiàn)時(shí),轉(zhuǎn)彎過程完成,直線運(yùn)動(dòng)變?yōu)榍€運(yùn)動(dòng)。所產(chǎn)生的離心慣性力推動(dòng)騎手恢復(fù)原位,保證了騎手在側(cè)向平面內(nèi)的站立穩(wěn)定性。
為分析此穩(wěn)定過程,令方程(9a) 和(9c) 中Ω=Ω0,將ψ和φ視為擾動(dòng)量,導(dǎo)出此線性方程組的特征方程
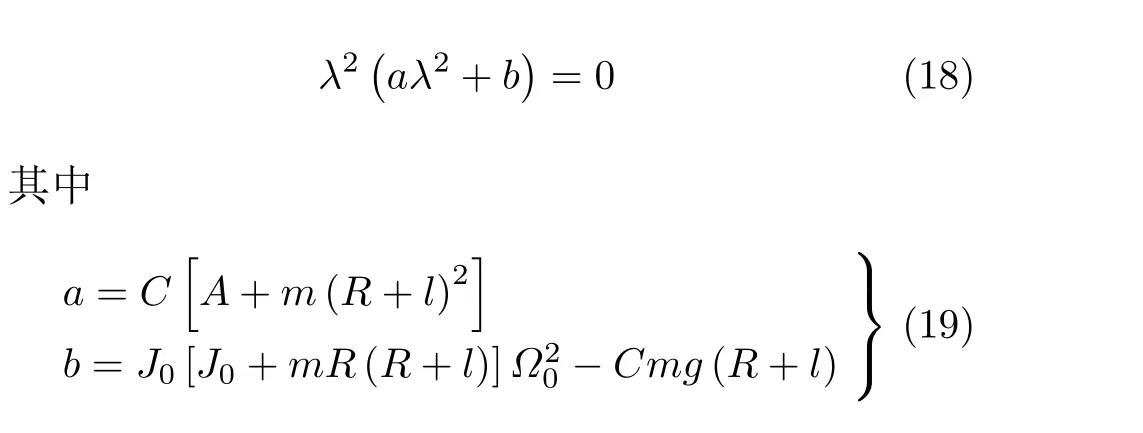
在方程(18) 確定的特征值中,λ= 0 的零特征值體現(xiàn)了變量φ因無恢復(fù)力導(dǎo)致的隨遇性。另兩個(gè)特征值的純虛根條件為b >0,即ψ和φ耦合運(yùn)動(dòng)的零解穩(wěn)定性條件。從中導(dǎo)出車輪的最低轉(zhuǎn)速

只要使車輪轉(zhuǎn)速滿足Ω0>Ω0,min,騎手對左右側(cè)擾動(dòng)的站立穩(wěn)定性就能得到保證。
與前文對前后側(cè)擾動(dòng)的穩(wěn)定性分析類似,線性系統(tǒng)的零解穩(wěn)定不能判斷原系統(tǒng)的穩(wěn)定性。但實(shí)際上任何機(jī)械系統(tǒng)均難以避免阻尼因素,若在系統(tǒng)中增加與角速度 ˙ψ成比例的阻尼項(xiàng),則線性系統(tǒng)的零解即轉(zhuǎn)為漸近穩(wěn)定。根據(jù)李雅普諾夫一次近似穩(wěn)定性理論,未經(jīng)線性化的原系統(tǒng)的零解亦漸近穩(wěn)定。
以上對滑板車運(yùn)動(dòng)過程的分析表明,騎手的肢體動(dòng)作或控制電機(jī)的驅(qū)動(dòng)制動(dòng),最終均轉(zhuǎn)化為重力和地面摩擦力對車體和騎手的作用。滑板車運(yùn)動(dòng)狀態(tài)的改變是重力和地面摩擦力的作用結(jié)果。任何系統(tǒng)都不可能依靠內(nèi)力改變運(yùn)動(dòng)狀態(tài)。
