Matlab 求解理論力學問題系列(五)不同坐標系間的數(shù)據(jù)轉換問題
2021-12-31 07:47:50高云峰
力學與實踐 2021年6期
高云峰
(清華大學航天航空學院, 北京 100084)
本系列文章介紹了很多利用數(shù)值計算處理問題的方法和過程。由于存在計算誤差,以及人為的輸入錯誤,計算得到的大量數(shù)據(jù)可能有誤。作為Matlab求解理論力學的系列文章,十分強調計算的可靠性,所以前面曾經(jīng)介紹過利用系統(tǒng)的守恒量來驗證數(shù)值計算的精度,或者利用解析解進行對比測試。如果系統(tǒng)不存在守恒量,可以考慮退化等特殊情況(這時往往有解析解或守恒量),對退化情況檢驗之后,再進行后續(xù)的計算。
某些問題可能在不同的坐標系中處理更方便,那如何判斷其是否正確?本文介紹一種數(shù)據(jù)轉換的方法,可以把不同坐標系的結果轉換到希望的坐標系中來觀察,并驗證其準確性。
為此本文設計了這樣兩個問題:(1)在非慣性系中看,隨手拋出的一個物體,其軌跡很復雜,我們如何來判斷計算是正確的呢?(2)在地球某點觀察太陽,太陽的視運動軌跡是什么曲線?
1 不同坐標系中的數(shù)據(jù)轉換關系
設有矢量ρ和兩個坐標系Oxiyizi和Oxjyjzj(圖1),基矢量分別為ei?(exi eyi ezi)T和ej?(exj eyj ezj)T。若用(ρ)i表示ρ在坐標系Oxiyizi中的分量,有
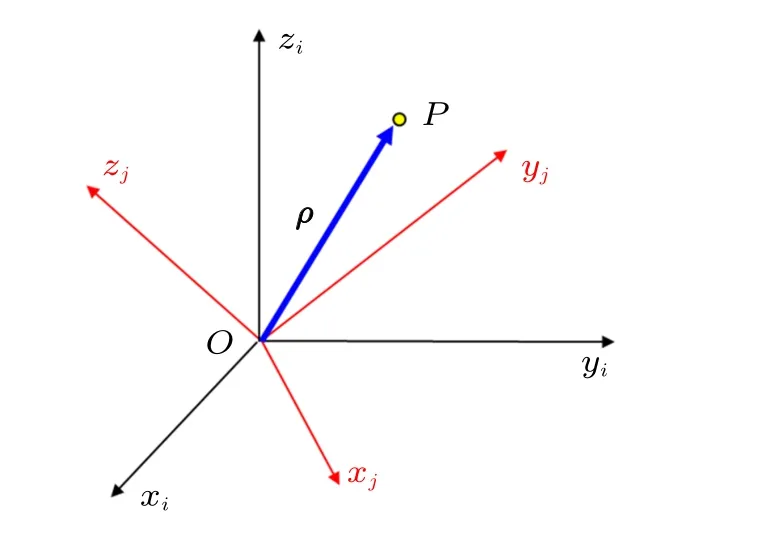
圖1 矢量和坐標系

利用基矢量,矢量ρ可以表示為

矢量與坐標系沒有關系,但是它在不同坐標系中的分量就與坐標系有關系了。因此一個問題就是:(ρ)i與(ρ)j有什么關系?
將式(2) 改寫,有
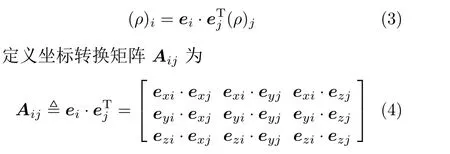
由于兩個單位矢量的點積等于其夾角的余弦,所以Aij也稱為方向余弦矩陣,從而有[1]

從式(5) 類似有(ρ)i=Aik(ρ)k,從而得到坐標系轉換矩陣的傳遞關系

以式(5)和式(6)為基礎可以得到更一般的關系。假設Ox1y1z1是基準參考坐標系(如動力學中的慣性系),ox′y′z′是平動坐標系(坐標系始終與基準坐標系平行),ox2y2z2是任意的動系(如動力學中的非慣性系),ox2y2z2初始時刻與ox′y′z′重合,轉動后用三個角度(如歐拉角ψ,θ,φ) 來表示;P是動點,在基準坐標系中矢徑為R,相對運動的矢徑為ρ,動系原點的矢徑為RO(圖2)。
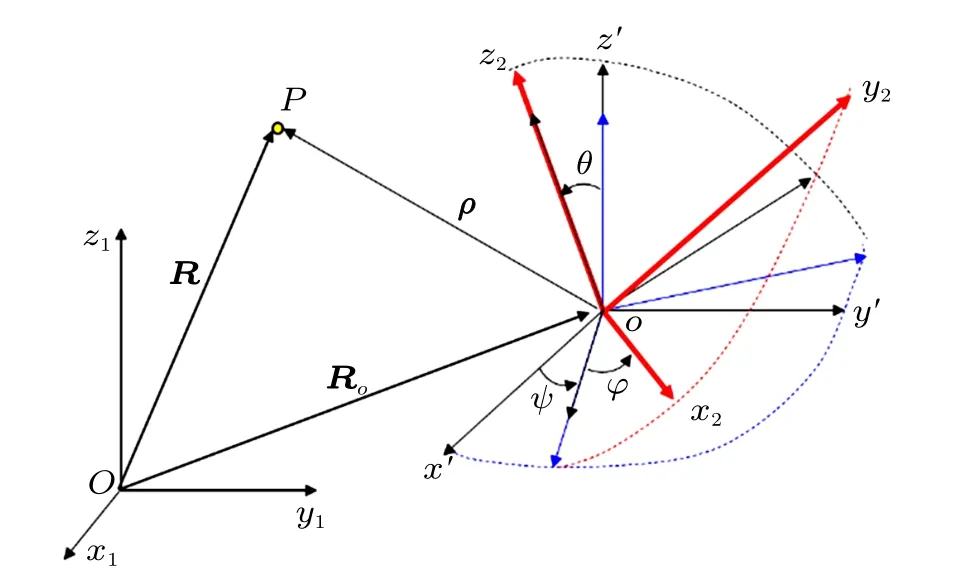
圖2 空間一般坐標系
根據(jù)運動學關系,始終有[2]

式(7) 可以在任意坐標系中表示,根據(jù)式(5),則有

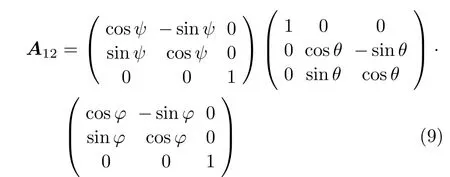
式(7) 給出了一般情況下坐標轉換關系,其中坐標轉換矩陣還是比較復雜的,如果用歐拉角表示,利用式(6) 的關系后,有
2 不同坐標系中的拋物問題
兩位觀察者,A在地面上(慣性坐標系),B在勻速轉動的轉盤邊緣(非慣性系)。B隨手拋出一物體,求兩位觀察者看到的物體運動軌跡(圖3,不考慮空氣阻力)。
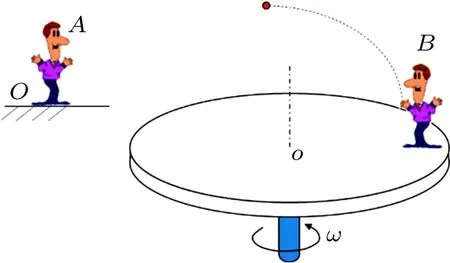
圖3 拋物示意圖
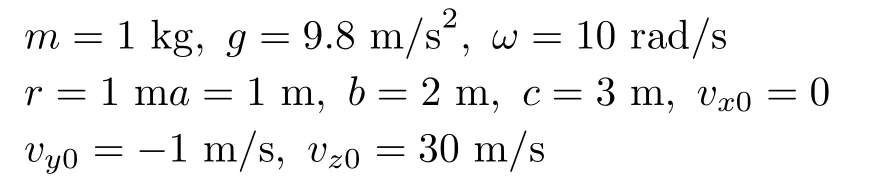
圖 4 是運動學關系示意圖, 假設 (R)1=(a b c)T,轉盤半徑為r,轉角為φ=ωt,B的位置在動系中為(r)2=(0r0)T,出手初速度在動系中為(v)2=(vx0vy0vz0)T。
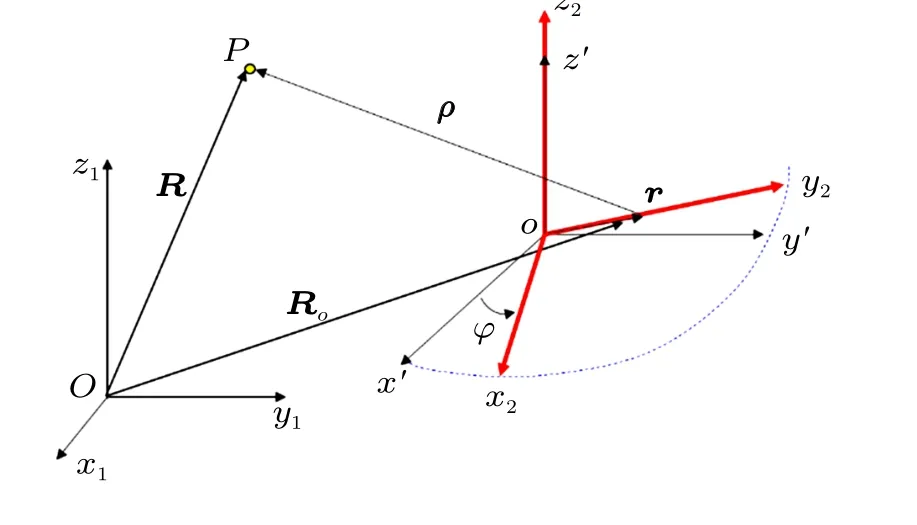
圖4 運動學關系
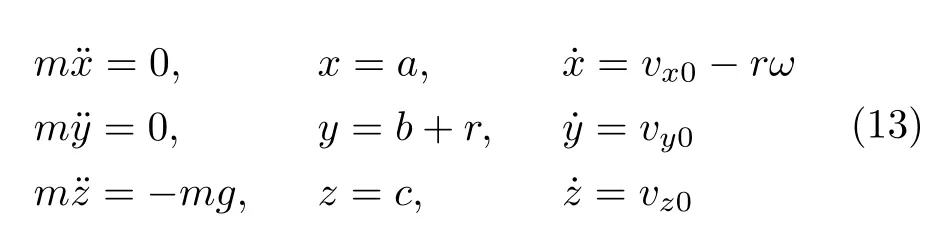
注意物體在不同坐標系中運動的動力學方程是不同的,根據(jù)理論力學知識,在非慣性系中動力學方程為

展開后的方程及初始條件為

給予具體參數(shù)
可以計算出結果,如圖5 (空間三視圖) 和圖6 (xy平面俯視圖)。
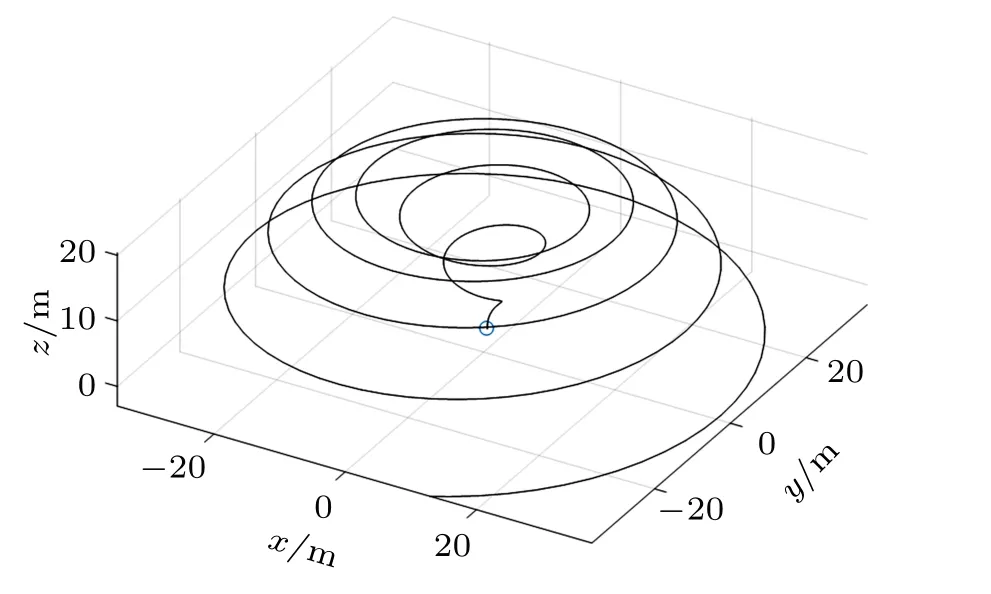
圖5 曲線的空間視圖
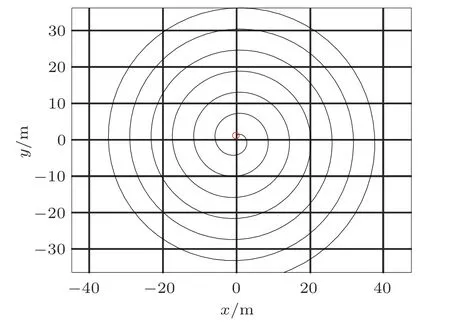
圖6 曲線的俯視圖
看起來曲線很復雜,我們怎么判斷計算結果可靠呢?
眾所周知,在慣性系中拋出一個物體其軌跡是拋物線,這是很明確的結論。因此可以這樣處理:設慣性系中算出曲線為κ1,非慣性系中算出的曲線為κ2,把慣性系中的曲線κ1數(shù)據(jù)轉換到非慣性系中得到曲線κ3,如果κ3能與κ2完全重合(兩者誤差小于給定的誤差,如積分的允許誤差),就認為非慣性系中的結果是可靠的。
從慣性系的角度看,動力學方程有

展開后的動力學方程及初始條件為
積分后結果如圖7 和圖8。我們有理由認為這些結果是合理可靠的,如曲線看起來是拋物線,俯視圖是一根直線,表示拋物線在一個平面內。當然還可以利用運動過程中的機械能守恒來判斷(略),總之我們認為慣性系中這些曲線合理可靠。
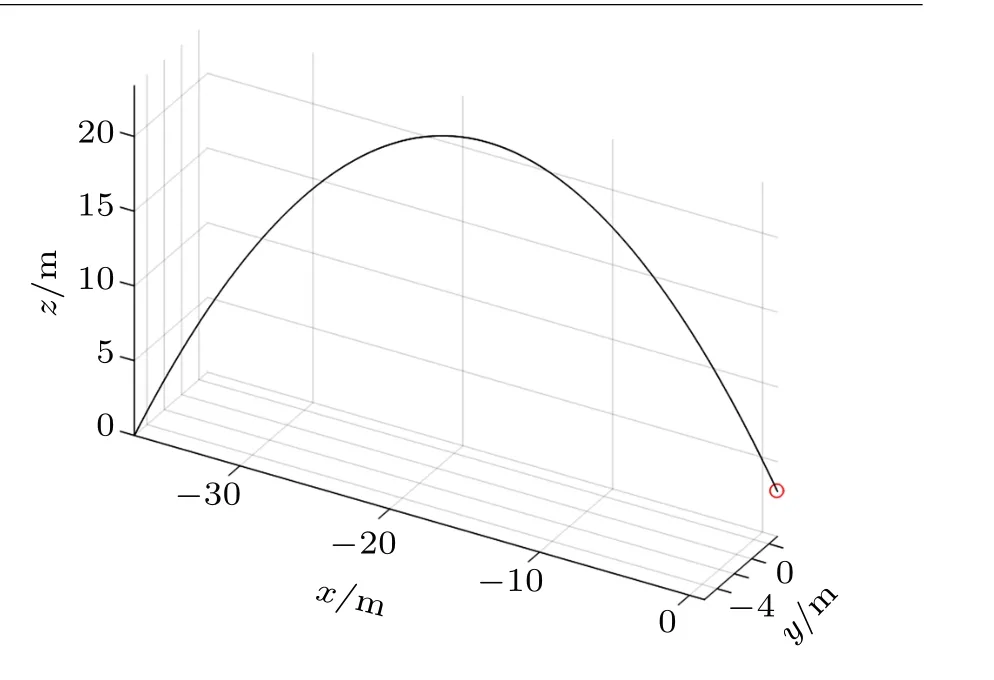
圖7 曲線的空間視圖
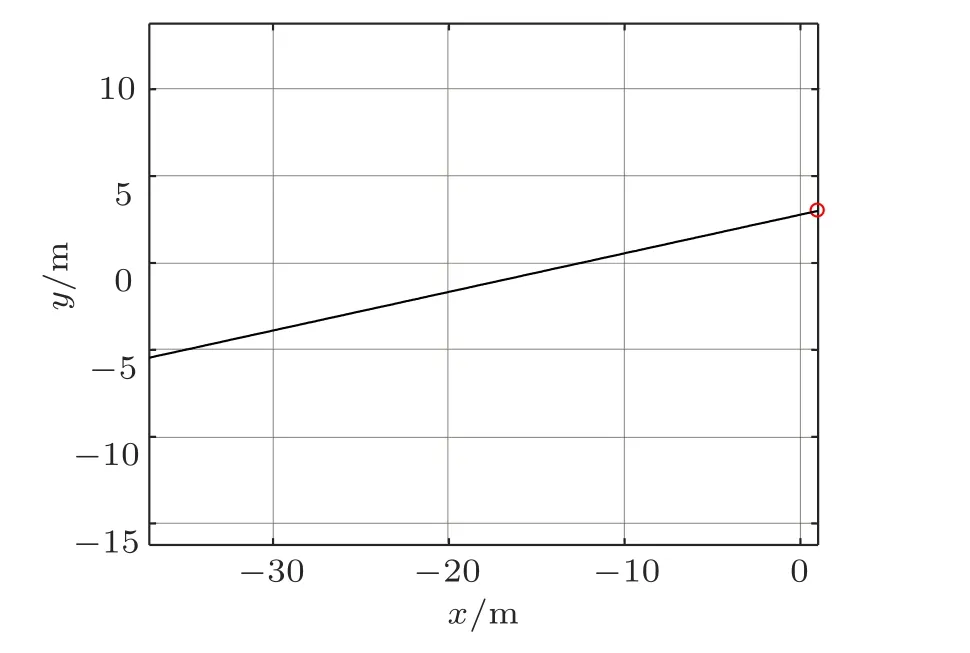
圖8 曲線的俯視圖
現(xiàn)在的問題是如何利用慣性系的結果去證明非慣性系的結果正確?
式(7) 和式(8) 給出了不同坐標系之間數(shù)據(jù)的轉換關系。具體到本問題中,轉換矩陣很簡單,z軸是平行的,退化為
如果想把慣性系的結果轉換到非慣性系,式(7)具體為

在Matlab 中,數(shù)據(jù)轉換的源代碼如圖9 所示。
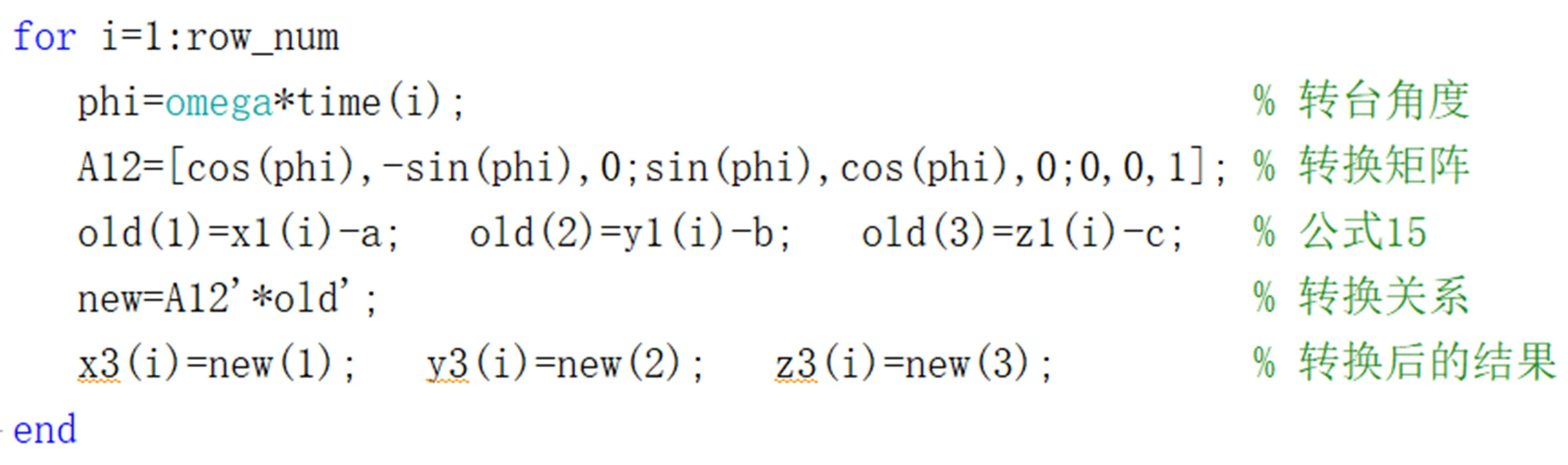
圖9 數(shù)據(jù)轉換的源代碼
其中 (x1(i)y1(i)z1(i))T表示慣性系中第i個點,(x3(i)y3(i)z3(i))T是轉換后得到的非慣性系中第i個點。在Matlab 中,A12’ 表示對A12 進行轉置。
數(shù)據(jù)轉換后,可以看到每個圓圈(非慣性系中直接算出的結果)都包含一個圓點(從慣性系中轉換得到的結果),說明兩者的精度都很高(如圖10 和圖11所示)。當然在比較的時候要注意,不同坐標系中的積分要同步,用等步長積分正好可以實現(xiàn)這一點。
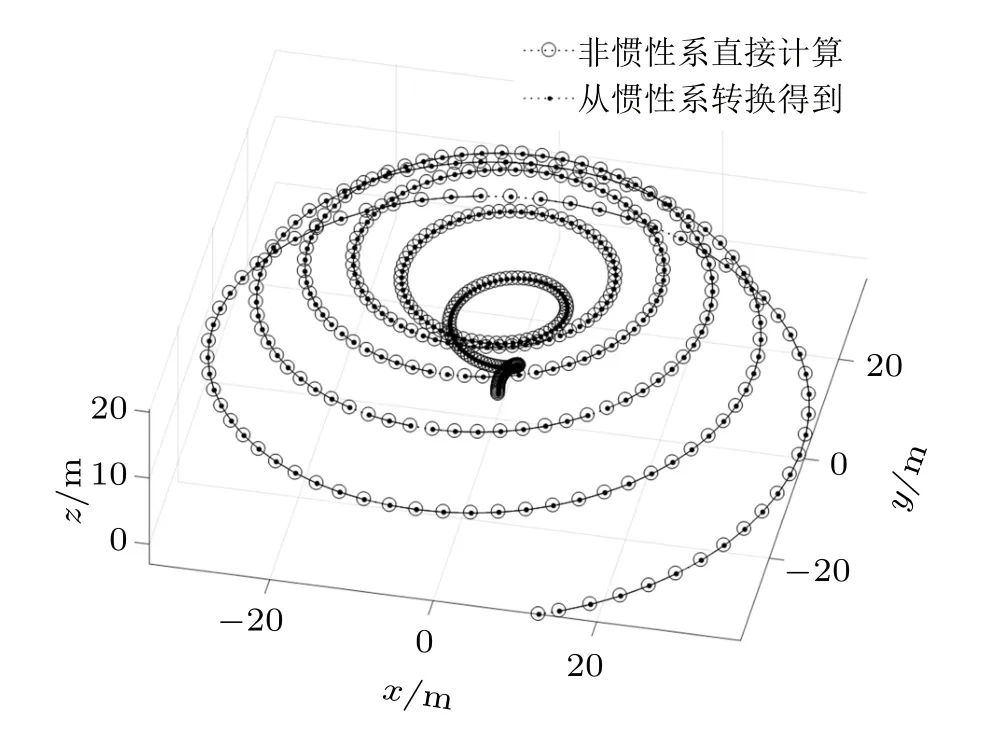
圖10 非慣性系中的空間圖
如果想把非慣性系的結果轉換到慣性系,結論依然很可靠(具體略)。綜合起來,說明圖5 和圖6的結果雖然有點出乎意料,卻是正確的。
根據(jù)這一事實,未來處理非慣性系的動力學問題時,除了直接處理非慣性系中的問題(動力學方程復雜,結果也復雜) 之外,還多了一種選擇:先在慣性系中進行分析(動力學方程簡單,結論正確性容易驗證),然后再利用坐標系之間的轉換關系,得到非慣性系中相應的結果。
3 太陽的視運動問題
人人都知道地球繞太陽的運動很簡單,但是如果做個調查,你在當?shù)乜吹降奶栠\動軌跡(視運動軌跡) 是什么曲線?有什么特點?估計絕大部分人一時答不上來。而利用數(shù)據(jù)轉換關系可以得出既簡單又出乎意料的結論。
假設地球繞太陽為圓周運動,為簡單設365 天。在日心坐標系OXY Z中,地軸(z軸) 的單位矢量為(0,-sinθ,cosθ)T,θ=23.5°(圖12)。設時間為春分點之后第t小時,地球球心運動至

其中AU 為天文單位。設跟隨地心運動的地心坐標系為oxyz,則轉換矩陣為
下標S 表示太陽坐標系,E 表示地球坐標系。
在地球表面P點,建立當?shù)氐臇|北天坐標系PENZ(圖12)。在地心坐標系中,P點的表達式為其中Re為地球半徑,φ為當?shù)鼐暥龋?2πt/24 為地球自轉角度。
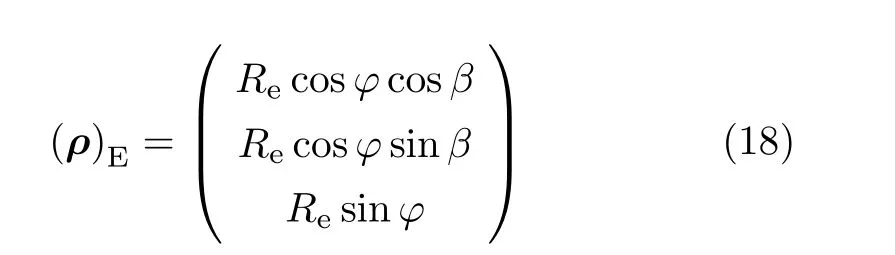
東北天坐標系相對地心坐標系的轉換矩陣為
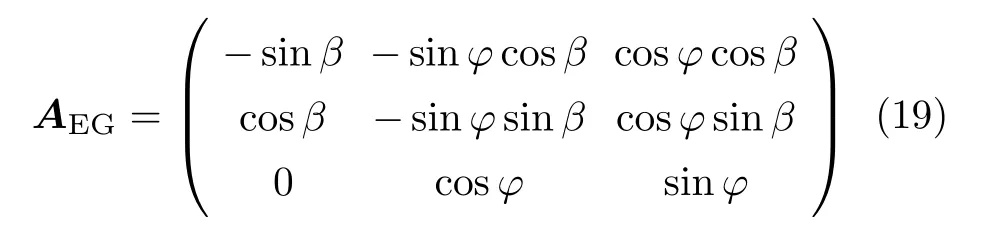
下標G 表示地理坐標系。
綜合圖12 和圖13,仍有運動學關系R=Ro+ρ,在地理坐標系中分解為
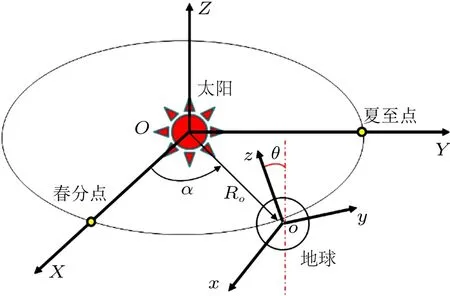
圖12 地球相對太陽的運動
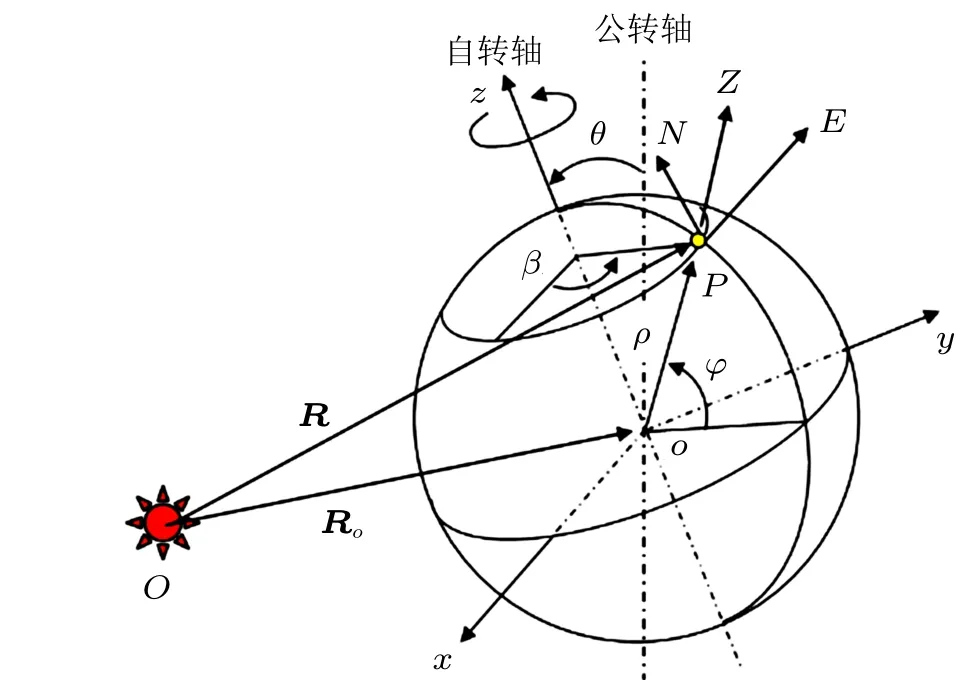
圖13 當?shù)貣|北天坐標系

根據(jù)式(6)、式(17) 和式(19),有

我們看到的太陽視運動, 就是式 (21) 中的-(R)G。式(21) 右邊每項都為已知函數(shù),代入數(shù)據(jù)后太陽視運動軌跡見圖14,顯示了全年特殊日期的太陽視運動軌跡:夏至當天軌跡偏北方,冬至當天軌跡偏南方,其他時間視運動軌跡會在夏至和冬至軌跡之間緩慢地變化,春分當天軌跡居中間。我們看不到水平面下方的太陽視運動軌跡,但仍畫出。注意每一天的視運動軌跡并不封閉,因此全年的太陽視運動軌跡則很像一個彈簧,但是這個彈簧兩端半徑微小,中間半徑略大,不過差距沒有圖中彈簧那么明顯(圖15),另外視運動軌跡很密集,在夏至與冬至之間有365 圈。
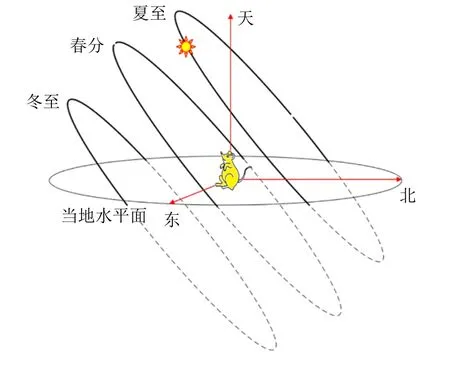
圖14 太陽某一天的視運動
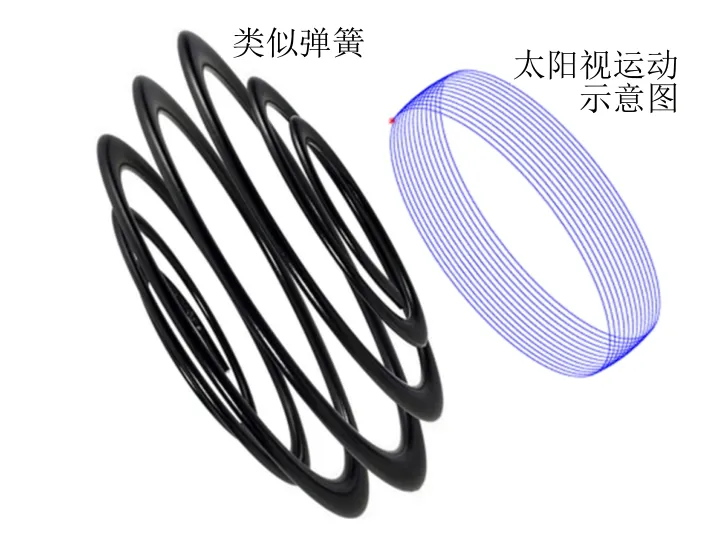
圖15 全年太陽視運動示意圖
4 小結
本文介紹了不同坐標系之間數(shù)據(jù)轉換的一般方法,利用這一方法,可以把問題先在某個坐標系中處理好,然后再轉換到另一個坐標系中。
在非慣性系拋體問題中,直接處理的方程比較復雜,結果也很復雜,難以判斷其正確性。但是在慣性系中,動力學方程很簡單,結果的物理含義也很清楚。利用不同坐標系之間的數(shù)據(jù)轉換關系,可以很容易證明兩種動力學方程的計算結果是正確的。
而在太陽視運動的問題中,從慣性系看地球的運動很簡單,但在地球上看太陽的運動,則比較復雜,出乎很多人的意料。利用數(shù)據(jù)轉換關系,可以把幾個簡單的運動(地球繞太陽的運動是圓周運動、地球上某點相對地球的運動也很簡單) 直接轉換為需要的結果。
