基于特征值靈敏度的共模-差模電壓控制SIDO Buck變換器穩(wěn)定性分析
2021-12-29 07:00:26皇金鋒謝鋒李慧慧
電機與控制學報 2021年11期
皇金鋒,謝鋒,李慧慧
(陜西理工大學 電氣工程學院,漢中 723001)
0 引 言
單電感雙輸出(single-inductor dual-output,SIDO)Buck變換器用一個電感實現(xiàn)雙路輸出[1],減小了變換器體積,節(jié)約了制作成本,具有廣闊的應(yīng)用前景[2-3],可作為便攜式移動設(shè)備的供電電源拓撲,成為近年來國內(nèi)外研究熱點[4-10]。
工作于連續(xù)導電模式(continuous conduction mode,CCM)SIDO Buck變換器輸出端存在交叉影響,嚴重影響了變換器的穩(wěn)定性,針對SIDO Buck變換器的性能問題,國內(nèi)外專家學者做了許多研究工作[11-14]。文獻[11]建立了電壓控制SIDO CCM Buck變換器的統(tǒng)一離散迭代映射模型,結(jié)果表明,電壓控制SIDO CCM Buck變換器隨支路開關(guān)管控制回路比例系數(shù)的減小或主開關(guān)管控制回路比例系數(shù)的增大而發(fā)生Hopf分岔。文獻[12]采用狀態(tài)空間平均法,分析了控制參數(shù)變化時電壓控制SIDO Buck變換器的穩(wěn)定性,研究結(jié)果表明,電壓控制參數(shù)具有穩(wěn)定上界或下界。文獻[13]建立了峰值電流模式(peak current mode, PCM)SIDO Buck變換器的統(tǒng)一離散迭代模型,研究結(jié)果表明,變換器的穩(wěn)定性與參考電流、初始電感電流和輸入電壓的變化密切相關(guān)。文獻[14]提出了一種電容電流紋波(capacitor current ripple,CCR)控制技術(shù),通過特征值分析了負載變化對CCR SIDO CCM Buck變換器穩(wěn)定性的影響,研究結(jié)果表明,提出的CCR控制SIDO CCM Buck變換器顯著降低了交叉影響并改善了瞬態(tài)性能。以上研究對提高SIDO Buck變換器的穩(wěn)定性具有實際意義,但是現(xiàn)有文獻關(guān)于控制參數(shù)變化對穩(wěn)定性的影響趨勢及程度還未研究。
相比傳統(tǒng)的獨立電壓控制,共模-差模電壓[15](common-mode voltage and differential-mode voltage,CMV-DMV)控制策略在不增加電路復(fù)雜程度的基礎(chǔ)上能夠有效降低變換器的交叉影響,然而該控制策略還未應(yīng)用于SIDO Buck變換器,且關(guān)于CMV- DMV控制CCM SIDO Buck變換器的穩(wěn)定性研究還未見報道。目前關(guān)于穩(wěn)定性研究主要分為線性方法和離散方法,線性方法主要依據(jù)系統(tǒng)的傳遞函數(shù),高階系統(tǒng)的傳遞函數(shù)具有較大的近似性,這導致分析誤差較大。離散方法一般適用于低階系統(tǒng),高階系統(tǒng)的離散模型十分復(fù)雜且求取困難。SIDO Buck變換器具有較高的階數(shù),同時有更多的電路參數(shù)和控制參數(shù),對該系統(tǒng)的穩(wěn)定性分析變得更加困難和復(fù)雜,故而尋求更為簡便的方法顯得尤為重要。狀態(tài)空間平均方程可表征變換器的線性特征,基于狀態(tài)空間平均方程的雅克比矩陣和勞斯-赫爾維茨判據(jù)可以得到系統(tǒng)穩(wěn)定的變換器參數(shù)和控制參數(shù)范圍[16-17],然而該方法在獲得穩(wěn)定參數(shù)范圍后無法進一步優(yōu)化參數(shù)從而提高系統(tǒng)的穩(wěn)定性。應(yīng)用靈敏度理論[19],可定性定量地分析系統(tǒng)各個參數(shù)對特征值的影響趨勢及影響程度,從而達到改善系統(tǒng)穩(wěn)定性的目的,因此利用狀態(tài)空間平均模型并結(jié)合靈敏度理論能夠較為全面的對系統(tǒng)的穩(wěn)定性進行分析。
本文以CMV-DMV控制CCM SIDO Buck變換器為研究對象,建立了系統(tǒng)的狀態(tài)空間方程,結(jié)合雅克比矩陣和勞斯-赫爾維茨判據(jù)得到了變換器控制參數(shù)的穩(wěn)定范圍,利用變換器的工作模式及輸出紋波電壓等約束條件得到了變換器的主電路參數(shù)范圍,在此基礎(chǔ)上應(yīng)用靈敏度分析了控制參數(shù)變化對系統(tǒng)穩(wěn)定性的影響。本文研究所得結(jié)論對CMV-DMV控制CCM SIDO Buck變換器控制器設(shè)計具有參考意義。
1 穩(wěn)定性分析
CMV-DMV控制CCM SIDO Buck變換器的電路結(jié)構(gòu)如圖1所示,將兩路輸出電壓的和與共模參考電壓進行比較生成脈沖信號Di作用于輸入開關(guān)管Qi,同時將兩路輸出電壓的差與差模參考電壓比較生成脈沖信號Da和Db作用于支路開關(guān)管Qa和Qb。
圖1中,UCref=Urefa+Urefb為共模參考電壓,UDref=Urefb-Urefa為差模參考電壓,Um為鋸齒波的幅值。
為得到CMV-DMV控制CCM SIDO Buck變換器控制參數(shù)的穩(wěn)定范圍,需對變換器的穩(wěn)定性進行分析,系統(tǒng)調(diào)節(jié)器采用比例積分,其傳遞函數(shù)為:
(1)
結(jié)合圖1,由比例積分控制原理可知,變換器的瞬時占空比可表示為:
圖1 共模-差模控制CCM SIDO Buck變換器Fig.1 Common mode-differential mode control CCM SIDO Buckconverter
(2)

根據(jù)CCM SIDO Buck變換器的工作原理,結(jié)合狀態(tài)空間平均法[16-17],可得閉環(huán)系統(tǒng)的狀態(tài)空間平均模型為:
(3)

根據(jù)Floquet理論[18],結(jié)合式(3)可得系統(tǒng)的雅克比矩陣?x ˙/?x為:
(4)

根據(jù)式(4)可以得到系統(tǒng)的特征方程:
|λI-J|=0。
(5)
將式(4)代入式(5)可得:
s5+as4+bs3+cs2+ds+e=0。
(6)
式(6)中a、b、c、d和e均為特征方程的系數(shù),由勞斯-赫爾維茨判據(jù)即可得到變換器穩(wěn)定的條件如式(7)所示。
(7)
式中,β=(ad-e)/a。
式(7)給出使得系統(tǒng)穩(wěn)定的參數(shù)范圍,若參數(shù)(例如控制參數(shù))滿足式(7)相關(guān)條件,則系統(tǒng)可工作在穩(wěn)定狀態(tài)。但是,滿足符合條件的參數(shù)并不唯一,而是存在多組參數(shù),在這多組參數(shù)中哪組參數(shù)更有利于提高系統(tǒng)的穩(wěn)定不能直接得出結(jié)論,下面將應(yīng)用靈敏度理論對穩(wěn)定性進一步分析。
2 控制參數(shù)特征值靈敏度分析
2.1 系統(tǒng)特征值
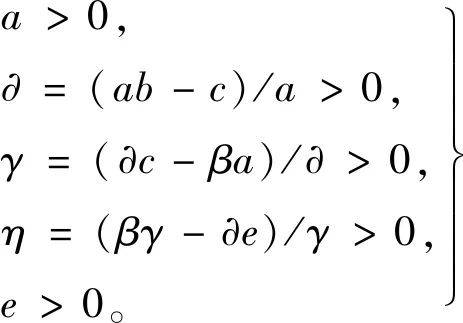
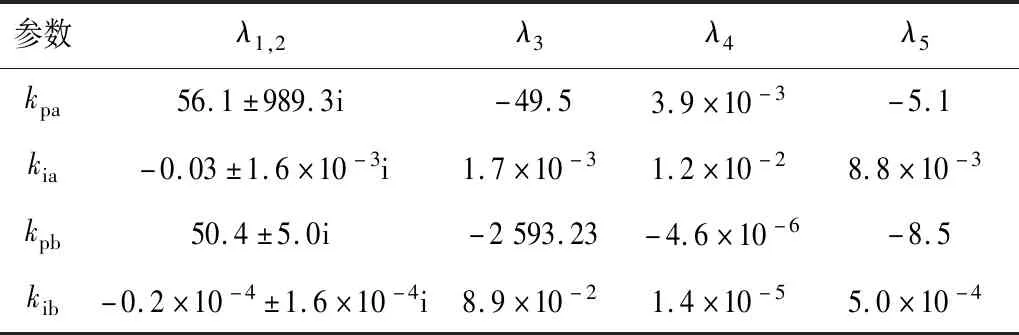
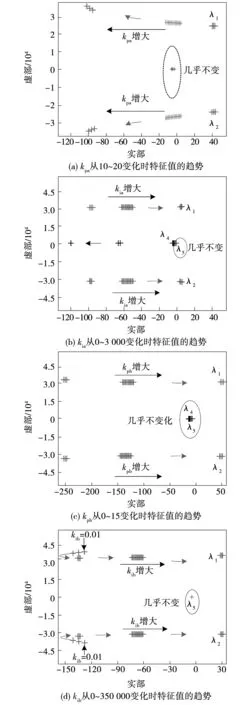
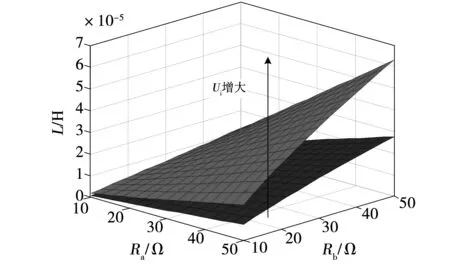
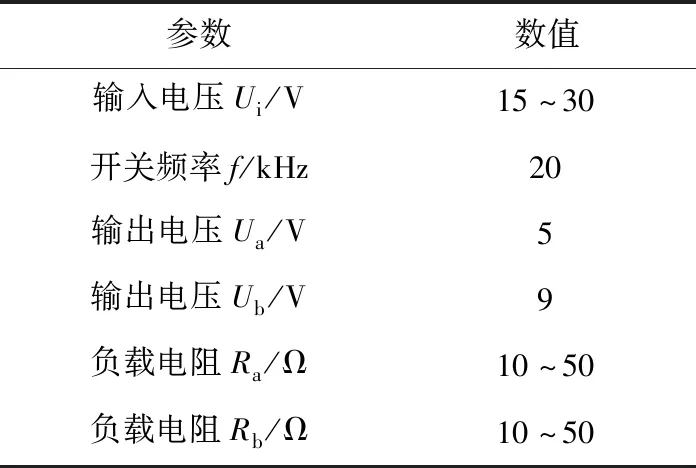
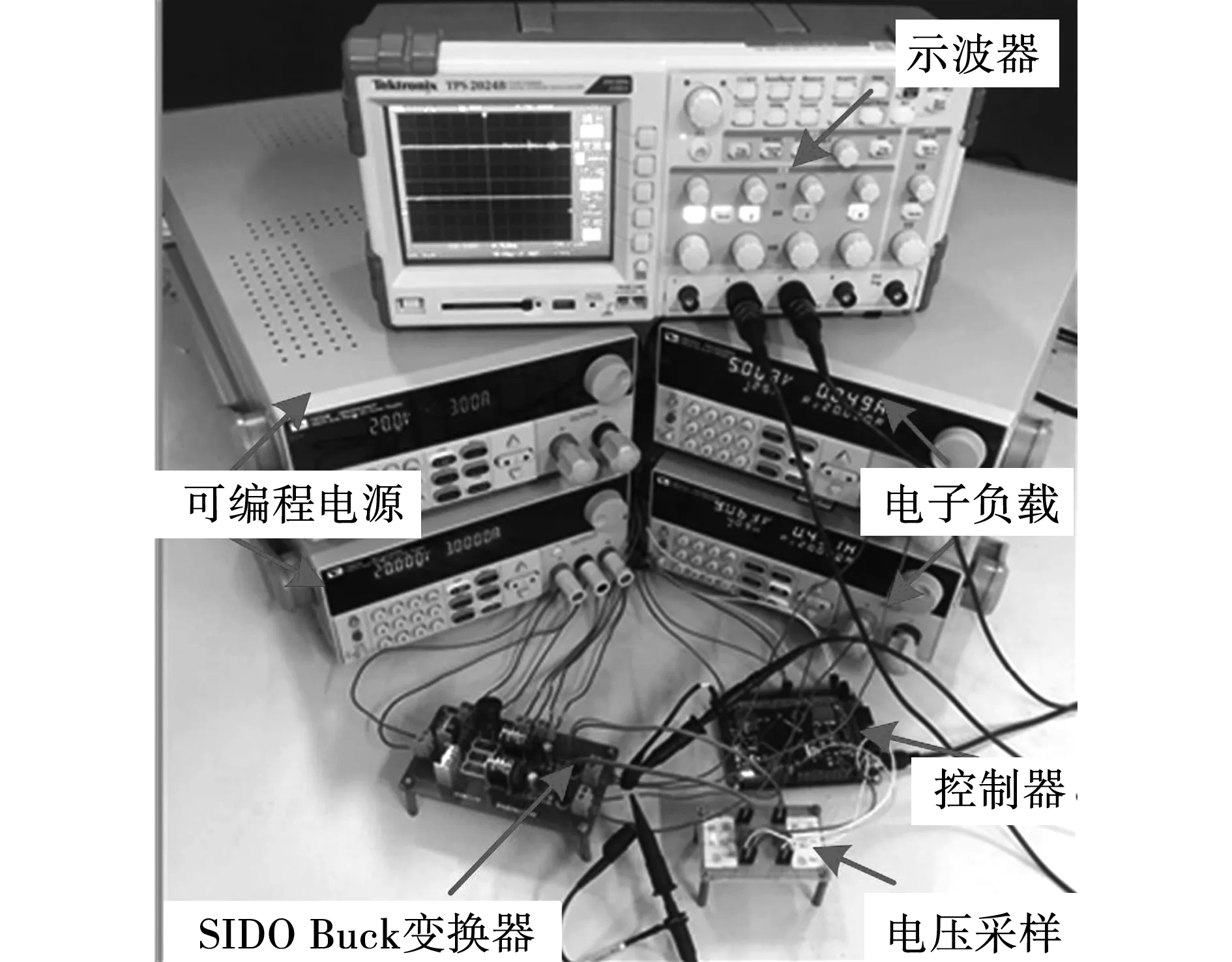
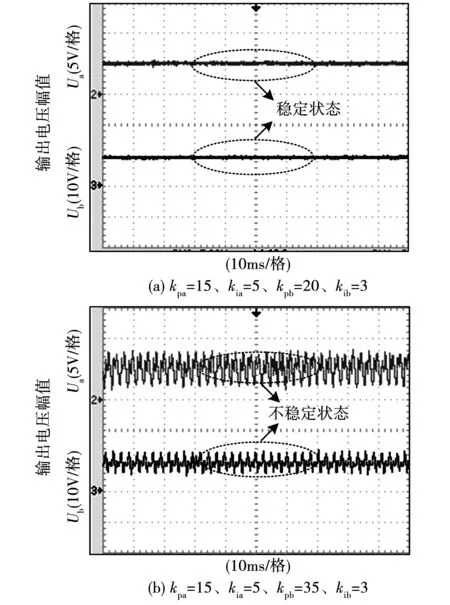
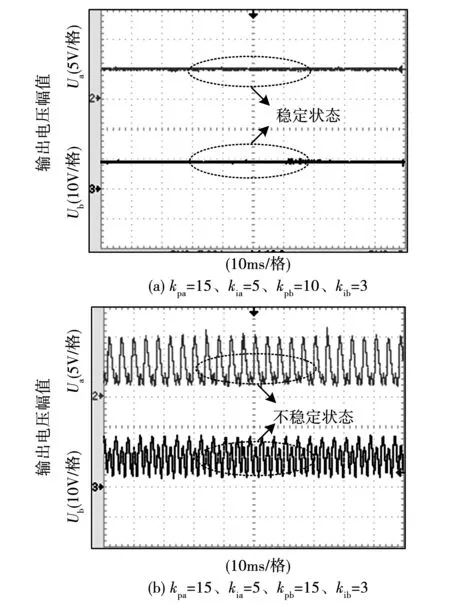
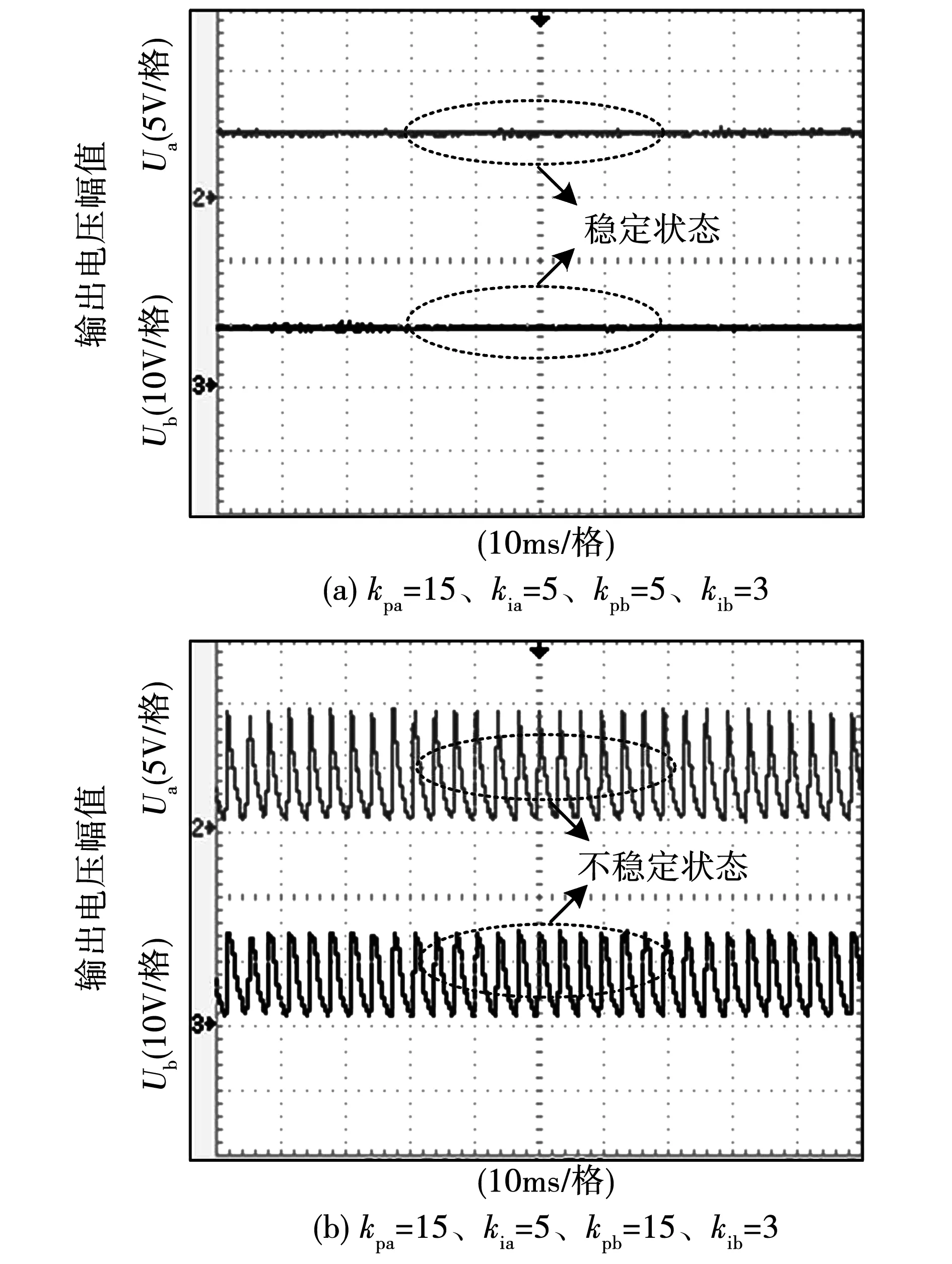
為了方便分析,現(xiàn)給出一組CMV-DMV控制CCM SIDO Buck變換器的參數(shù):電感L=568 μH,電容Ca=161 μF、Cb=90 μF,輸入電壓Ui=20 V,負載Ra=20 Ω,Rb=20 Ω。根據(jù)式(7)可以得到控制參數(shù)的取值范圍:當kpa=15、kia=5、kib=3時,kpb的取值范圍為0.85 表1 系統(tǒng)特征值Table 1 System characteristic value 由表1可知,系統(tǒng)特征值的實部是負值,表明系統(tǒng)在平衡點處是穩(wěn)定的。其中λ1,2是一對共軛復(fù)根,它的實部變化表征了系統(tǒng)的穩(wěn)定程度,虛部變化表征了系統(tǒng)的阻尼程度及振蕩頻率的變化情況;λ4最靠近零軸,最有可能越過零軸使得系統(tǒng)不穩(wěn)定,因此需要著重對λ1,2和λ4進行分析。 特征值靈敏度可定量表達出參數(shù)改變對系統(tǒng)影響的程度和趨勢,從而為提高系統(tǒng)的穩(wěn)定性提供理論指導。系統(tǒng)特征值λi對系統(tǒng)參數(shù)Kj的靈敏度[19]為: (8) 將以上變換器參數(shù)代入式(8)即可得特征值對控制參數(shù)的靈敏度,如表2所示。 表2 特征值對控制參數(shù)的靈敏度Table 2 Sensitivity of eigenvalues to control parameters 分析表2可知,λ1,2對控制參數(shù)的特征值靈敏度為復(fù)數(shù),復(fù)數(shù)實部的絕對值大小反映了參數(shù)變化對系統(tǒng)穩(wěn)定性的影響程度,并且當靈敏度的實部大于零時,減小該參數(shù)有利于提高系統(tǒng)的穩(wěn)定性;當靈敏度的實部小于零時,增大該參數(shù)有利于提高系統(tǒng)的穩(wěn)定性。結(jié)合表2,改變系統(tǒng)控制參數(shù)kpa、kia、kpb和kib的取值,即可得系統(tǒng)主要特征值的變化趨勢,如圖2所示。 由圖2(a)可以看出,當kpa在[10,20]范圍內(nèi)變化時,系統(tǒng)的特征值從復(fù)平面的右半部分向左半部分移動,在kpa≥11.50時,共軛復(fù)根λ1,2的實部由正變負,且呈現(xiàn)虛部逐漸增大的變化特點;λ4、λ5為負實根并且靠近零點,最終穩(wěn)定在-0.30,這表明kpa具有穩(wěn)定下界。由圖2(b)可以看出,當kia在[0,3 000]范圍內(nèi)變化時,系統(tǒng)的特征值從復(fù)平面的左半部分向右半部分移動,在kia≥2 865.0時,共軛復(fù)根λ1,2的實部由負變正,且呈現(xiàn)虛部基本保持不變的特點;λ4為負實根且從靠近零點的位置逐漸向左移動;λ5為負實根并且靠近零點,最終穩(wěn)定在-0.29。由圖2(c)可以看出,當kpb在[0,15]范圍內(nèi)變化時,共軛復(fù)根λ1,2的變化趨勢同圖2(b);在kpb≥12.50時,共軛復(fù)根λ1,2的實部由負變正,且呈現(xiàn)虛部逐漸減小的變化特點;特征根λ4、λ5的變化趨勢同圖2(a)。由圖2(d)可以看出,當kib在[0,350 000]范圍內(nèi)變化時,共軛復(fù)根λ1,2的負實部先向左移動再向右移動;在kib≥331 000.0時,共軛復(fù)根λ1,2的實部由負變正,且呈現(xiàn)虛部逐漸減小的變化特點;特征根λ4、λ5的變化趨勢同圖2(a)。以上分析結(jié)果表明kpb、kia、kib具有穩(wěn)定上界。 圖2 控制參數(shù)變化時特征值的變化趨勢Fig.2 Change trend of the characteristic value when the control parameter changes SIDO Buck變換器不僅需要設(shè)計控制參數(shù),同時要進行主電路參數(shù)設(shè)計。主電路的電感需要滿足工作模式的約束;電容需滿足輸出紋波電壓的約束,下面給出參數(shù)設(shè)計方法。 3.1.1 電感設(shè)計 根據(jù)文獻[6]可知,SIDO Buck變換器臨界電感LC的表達式為: (9) 結(jié)合式(9),圖3給出了臨界電感在一定輸入電壓和負載范圍內(nèi)的變化情況。 圖3 臨界電感隨負載和輸入電壓的變化關(guān)系Fig.3 Critical inductance changes with load and input voltage 分析式(9)可知,臨界電感LC與輸入電壓Ui和負載Ra、Rb有關(guān),將式(9)對輸入電壓Ui和負載Ra、Rb求偏導可得: (10) 分析式(10)可知,臨界電感LC隨著輸入電壓Ui,負載Ra和Rb的增大而增大,因此要求變換器全動態(tài)范圍工作于CCM時,取1.2倍裕量可得變換器的電感取值范圍: (11) 此時,變換器全動態(tài)范圍均能滿足變換器的工作模式要求。 3.1.2 電容設(shè)計 根據(jù)文獻[6]可知,SIDO Buck變換器工作于CCM時兩條支路的輸出紋波電壓分別為: (12) 分析式(12)可以看出,此時變換器的輸出紋波電壓與負載Ra和Rb有關(guān),將式(12)分別對Ra和Rb求偏導可得: (13) 因此,工作在一定輸入電壓和負載范圍內(nèi)的SIDO Buck變換器輸出紋波電壓最大值分別為: (14) 根據(jù)式(14)可知,若變換器規(guī)定的最大輸出紋波電壓為UPP-a和UPP-b,電容取1.2倍裕量,則滿足規(guī)定輸出紋波電壓要求的電容取值為: (15) 為了驗證理論分析的正確性,搭建了如圖4所示的CMV-DMV控制CCM SIDO Buck變換器實驗平臺,變換器參數(shù)如表3所示。 表3 CCM SIDO Buck變換器電路參數(shù)Table 3 Circuit parameters of SIDO Buck converter 圖4 實驗平臺Fig.4 Experiment platform 根據(jù)式(11)和式(15)可得到滿足變換器工作模式和輸出紋波電壓要求的電感和電容取值分別為:L=568 μH,Ca=161 μF,Cb=90 μF。 首先在Ui=30 V,Ra=Rb=10 Ω的條件下,根據(jù)式(7)可得到系統(tǒng)穩(wěn)定的控制參數(shù)范圍:當kpa=15、kia=5、kib=3時kpb的取值范圍為0 圖5 Ui=30 V,Ra=Rb=10 Ω時系統(tǒng)穩(wěn)定性實驗結(jié)果Fig.5 Experimental results of system stability at Ui=30 V,Ra=Rb=10 Ω 分析圖5(a)可知,當控制參數(shù)為kpa=15、kia=5、kpb=20、kib=3時,控制參數(shù)在穩(wěn)定范圍之內(nèi),變換器是穩(wěn)定的。分析圖5(b)可知,當控制參數(shù)取kpa=15、kia=5、kpb=35、kib=3時,kpb的取值大于穩(wěn)定值,變換器處于不穩(wěn)定的低頻振蕩狀態(tài)。 其次在Ui=20 V,Ra=Rb=20 Ω的條件下,根據(jù)式(7)可得到系統(tǒng)穩(wěn)定的控制參數(shù)范圍:當kpa=15、kia=5、kib=3時kpb的取值范圍為0.85 圖6 Ui=20 V,Ra=Rb=20 Ω時系統(tǒng)穩(wěn)定性實驗結(jié)果Fig.6 Experimental results of system stability at Ui=20 V,Ra=Rb=20 Ω 分析圖6(a)可知,當控制參數(shù)為kpa=15、kia=5、kpb=10、kib=3時,控制參數(shù)在穩(wěn)定范圍之內(nèi),變換器是穩(wěn)定的。分析圖6(b)可知,當控制參數(shù)取kpa=15、kia=5、kpb=15、kib=3時,kpb的取值大于穩(wěn)定值,變換器處于不穩(wěn)定的低頻振蕩狀態(tài)。 最后在Ui=15 V,Ra=Rb=50 Ω的條件下,根據(jù)式(7)可得到系統(tǒng)穩(wěn)定的控制參數(shù)范圍:當kpa=15、kia=5、kib=3時kpb的取值范圍為0 圖7 Ui=15 V,Ra=Rb=50 Ω時系統(tǒng)穩(wěn)定性實驗結(jié)果Fig.7 Experimental results of system stability at Ui=15 V, Ra=Rb=50 Ω 分析圖7(a)可知,當控制參數(shù)為kpa=15、kia=5、kpb=5、kib=3時,控制參數(shù)在穩(wěn)定范圍之內(nèi),變換器是穩(wěn)定的。分析圖7(b)可知,當控制參數(shù)取kpa=15、kia=5、kpb=15、kib=3時,kpb的取值大于穩(wěn)定值,變換器處于不穩(wěn)定的低頻振蕩狀態(tài)。以上實驗結(jié)果驗證了理論分析的正確性。 本文建立了共模-差模控制CCM SIDO Buck變換器的狀態(tài)空間平均模型,利用雅克比矩陣和勞斯-赫爾維茨判據(jù)得到了控制參數(shù)的穩(wěn)定范圍。同時應(yīng)用靈敏度理論,分析了共模-差模電壓控制CCM SIDO Buck變換器特征值靈敏度對系統(tǒng)的穩(wěn)定性影響程度。理論分析和實驗結(jié)果表明:支路a的比例系數(shù)kpa具有穩(wěn)定下界,積分系數(shù)kia具有穩(wěn)定上界和下界;同時支路b的比例系數(shù)kpb和積分系數(shù)kib均具有穩(wěn)定上界和下界。基于系統(tǒng)的靈敏度,得到了主導特征值對系統(tǒng)穩(wěn)定性的影響程度,可通過合理設(shè)計控制器參數(shù)來改善系統(tǒng)的穩(wěn)定性:即增大kpa、減小kia、減小kpb、減小kib有利于提高系統(tǒng)的穩(wěn)定性。本文研究所得結(jié)論對共模-差模電壓控制CCM SIDO Buck變換器的控制器設(shè)計具有實際的參考意義。
2.2 控制參數(shù)特征值靈敏度

3 實例分析
3.1 參數(shù)設(shè)計
3.2 實驗驗證
4 結(jié) 論
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34電子制作(2018年18期)2018-11-14 01:48:24家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44