一種預防重載車輛側翻的在線監測預警系統設計
2021-12-27 11:05:34郝曉曦黃健斌許堯興
制造業自動化 2021年11期
關鍵詞:模型
郝曉曦,陳 胡,陳 軍,黃健斌,許堯興
(五邑大學 智能制造學部,江門 529020)
0 引言
車輛側翻是指車輛在行駛時,發生繞縱軸轉動90°或者更大角度,車體與路面相觸碰[1]。大型車輛如重型泥頭車、重型翻斗車等,由于車輛結構存在質心高、結構和質量大等特點,在大半徑轉彎和躲避障礙物等極限工況時,極易發生側翻事故,即為車輛曲線行駛引起的非絆倒型側翻[2]。如何在不改變車輛原有結構的基礎上,預防該類型的側翻事故發生,已成為各類交通運輸行業關注的熱點問題。
二十世紀末,Dunwoody等人率先提出了橫向載荷轉移率(LTR)的預警方式,該預警系統通過耦合在車輛的傳感器件組,檢測車輛橫向轉移負荷信號和橫向加速度信號,并由力矩計算器計算出基于傳感器組件信號的滾動力矩,為交通工具提供一種可能性側翻指示計[3]。以H.Imine為代表的研究人員,利用高階滑動估計模式觀測器估計車輛橫向極限加速度和重心高度,希望以此提高控制算法的的精度[4]。2013年,Chad Larish等人在傳統的LTR算法基礎上,考慮到車子的側向加速度和轉向模式,提出了一種可以預測橫向載荷轉移率的算法,以此標定側翻指標的門檻值[5]。一直以來,為提高預警精度和實時性,研究者們不斷地提出改進預防側翻算法,因此這種側翻預警方法在理論上已經較為成熟。然而,在實踐中,面對復雜的干擾狀況,仍需進一步考慮各類環境對預警檢測效果的影響。本文旨在通過實物仿真建立車輛在行駛過程中各主要動態性能參數與橫向載荷轉移率之間的關系,并優化LTR理論中各種邊界條件和假設,進而更準確的判斷車輛在行駛過程中的姿態。
1 側翻預警系統設計
1.1 預警系統門限值確定
在側翻控制理論的研究中,車輛發生側翻時,路面對左、右車輪的支反力為零。根據式(1)知,LTR區間大小為(0,1),當值為0時,表示左、右車輪受到地面支反力相同,車輛在平穩狀態行駛。當取值為1時,表示某側車輪支反力值為0,車輪與地面分離,車輛處于側翻狀態。通常,不會將門限值取在車輛已經側翻狀態,具體門限值指標,根據系統穩定情況,在(0,1)范圍內合理判斷。

目前,研究車輛側翻主要從剛性車輛模型和非剛性車輛模型出發。在剛性車輛模型的表達式中,可以明顯反應出加速度、質心、輪距三者關系,但由于忽視了輪胎、懸架等結構參數,使得推導方式簡單,計算閾值整體偏大。不能準確反應車輛運行時狀態。對于非剛性車輛側翻模型研究,一般以三自由度和多自由度為研究對象,考慮了懸架彈簧剛度、懸架阻尼和輪胎側偏力等影響因素,客觀地造成了模型復雜,加大了對硬件條件的限值。
因此,本文在構建車輛側翻模型時,選取非剛性車輛模型為研究對象,忽視了輪胎動力學特性、前后軸不對稱性,假設在正常水平路面行駛,而不考慮其他意外狀況,并將彈簧結構線性化作為整車內部受力點,以簧載質量變化作為其中一個主要輸入對象,進而探究各種主要動態特性參數與橫向載荷轉移率之間的關系。具體模型動力學分析如下文所述:
如圖1所示,車輛在左轉彎時的力學模型(后輪截面)。
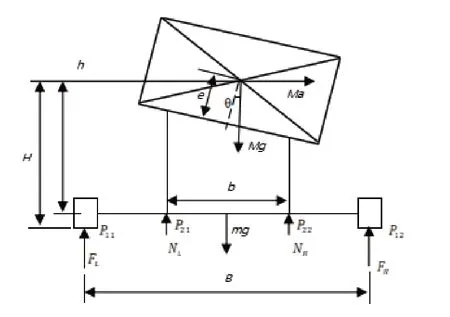
圖1 車輛左轉彎力學模型(后輪)
由式(10)分析,可知這里在側翻準靜態模型的基礎上,考慮了側傾平面的加速度和懸架的柔順性,相比較傳統的剛性車輛模型,考慮增加了車體自身結構參數,同時,簡化了懸架的剛度和阻尼。以此,驗證車輛姿態變化與LTR的關系。
式中:
FL、FR為地面分別對應左后輪支反力
M為裝載質量
H為裝載質量重心至地面的高度
h為裝載重心至輪軸中心的距離
a為橫向加速度
m為空載時車身分布于后軸的質量
B為后左右車輪與地面接觸中心距
b為簧距
g為重力加速度
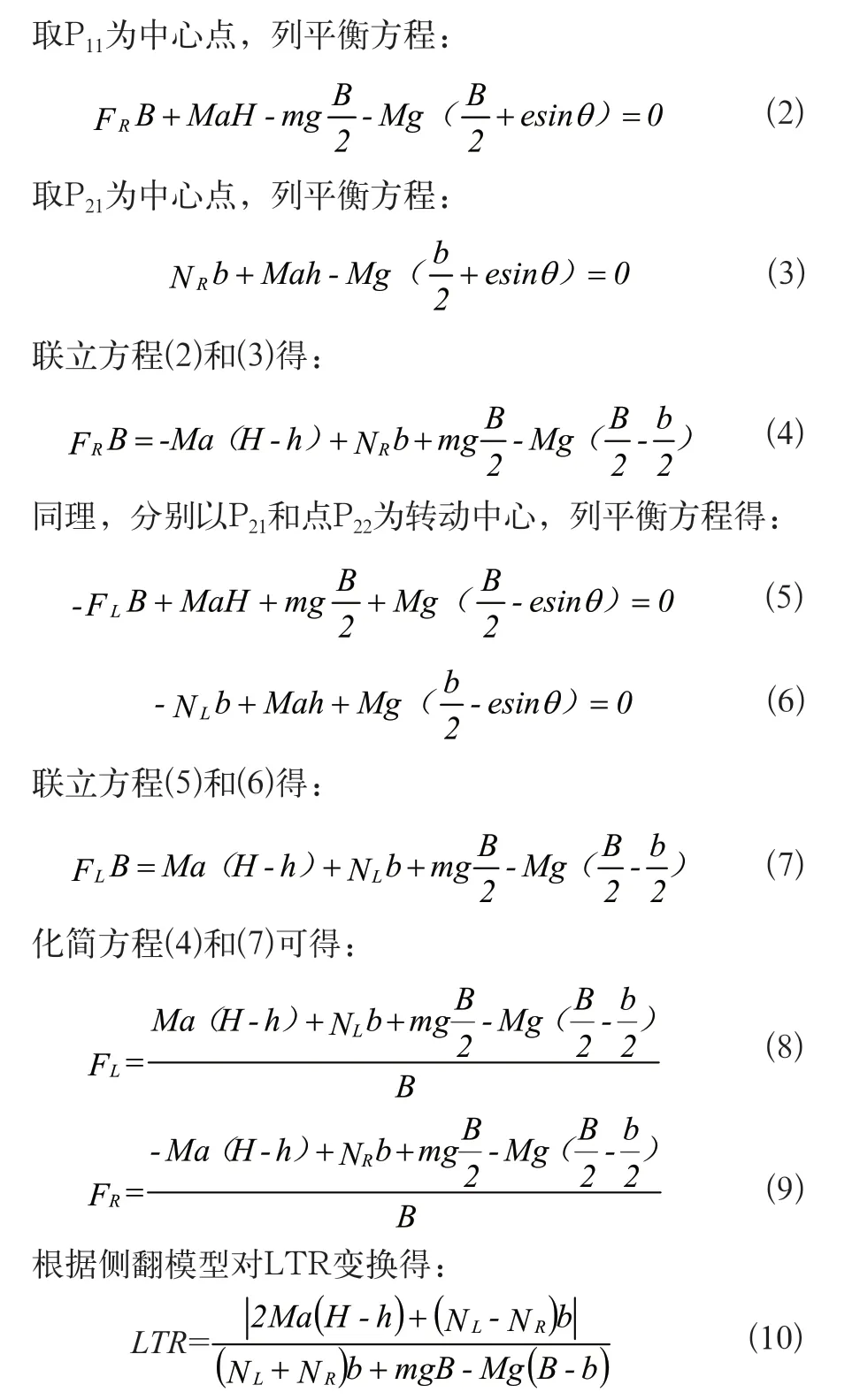
具體一些有關模型的參數現已列出,如表1所示:
表1 模型中已知參數
1.2 預警系統總體結構方案
車輛側翻在線監測系統主要分為上位機硬件和下位機硬件兩部分。系統設計框圖如圖2所示,該系統是在小車運動狀態下,下位機對加速度、速度傳感器和左、右位移傳感器的信號采集,做先期信號處理。再利用無線通信模塊,將處理后的數據經串口傳遞給上位機,利用Labview軟件對串口傳遞過來的數據實時顯示、存儲和回放。
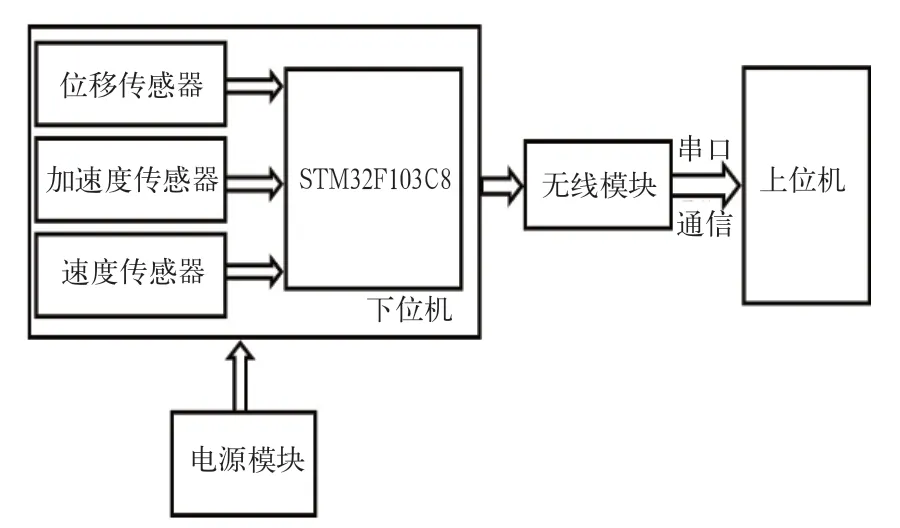
圖2 系統設計框圖
1)位移傳感器
本實驗選取HG-C1100作為測量實際位移偏差的激光位移傳感器[6]傳感器與被測物體定位點在100mm處,量程為65mm~135mm,中心光點半徑為6mm,重復精度70μm。利用標定好的彈簧系數Ks,再通過檢測簧載的微小變化量Δs,由下式得出簧載受到的力F:

2)速度傳感器
選取常用的光電編碼測速傳感器測量車子在行駛過程中的速度,該傳感器線數100線,內外直徑分別是3.5mm、22mm。對管中包含兩根信號線,輸出為脈沖波,電源電壓5V。通過多次實際測量,電機轉動一周,行程公式為(C/100)*(14/57)*104*πmm。
3)加速度傳感器
選取六軸運行陀螺儀傳感器作為測量加速度,傳感芯片采用MPU6065,電壓范圍在3.3V~5V。方便嵌入式開發連接。該傳感器內部用卡爾曼動態濾波算法寫入,在動力學求解方面可以做到快速求解,解決了系統延遲性問題。結合微處理器快速運算的特點,可以提高精度,降低寫入噪聲。在串口傳輸方面,可以通過串口電平TTL、串口總線232兩種傳輸方式。為用戶提供了多種選
2 側翻預警系統軟件設計
系統軟件流程圖如圖3所示。首先進行初始化參數,上位機部分通過在Labview前面板設定好車輛相關參數,并調好與下位機溝通的通信參數,做好初始參數設置準備,下位機采集程序將傳感器模塊收集到的信號降噪、濾波。然后,發送給微處理單元,進行信息處理,將處理后的結果和各傳感器轉換的數字量信號,通過無線模塊傳遞給上位機[7]。上位機接收上傳數據,在通過編寫的程序框圖中進行內部程序處理,將處理后的結果實時顯示在前面板中。并保存在指定的文件夾中,為后期數據處理分析提供數據。
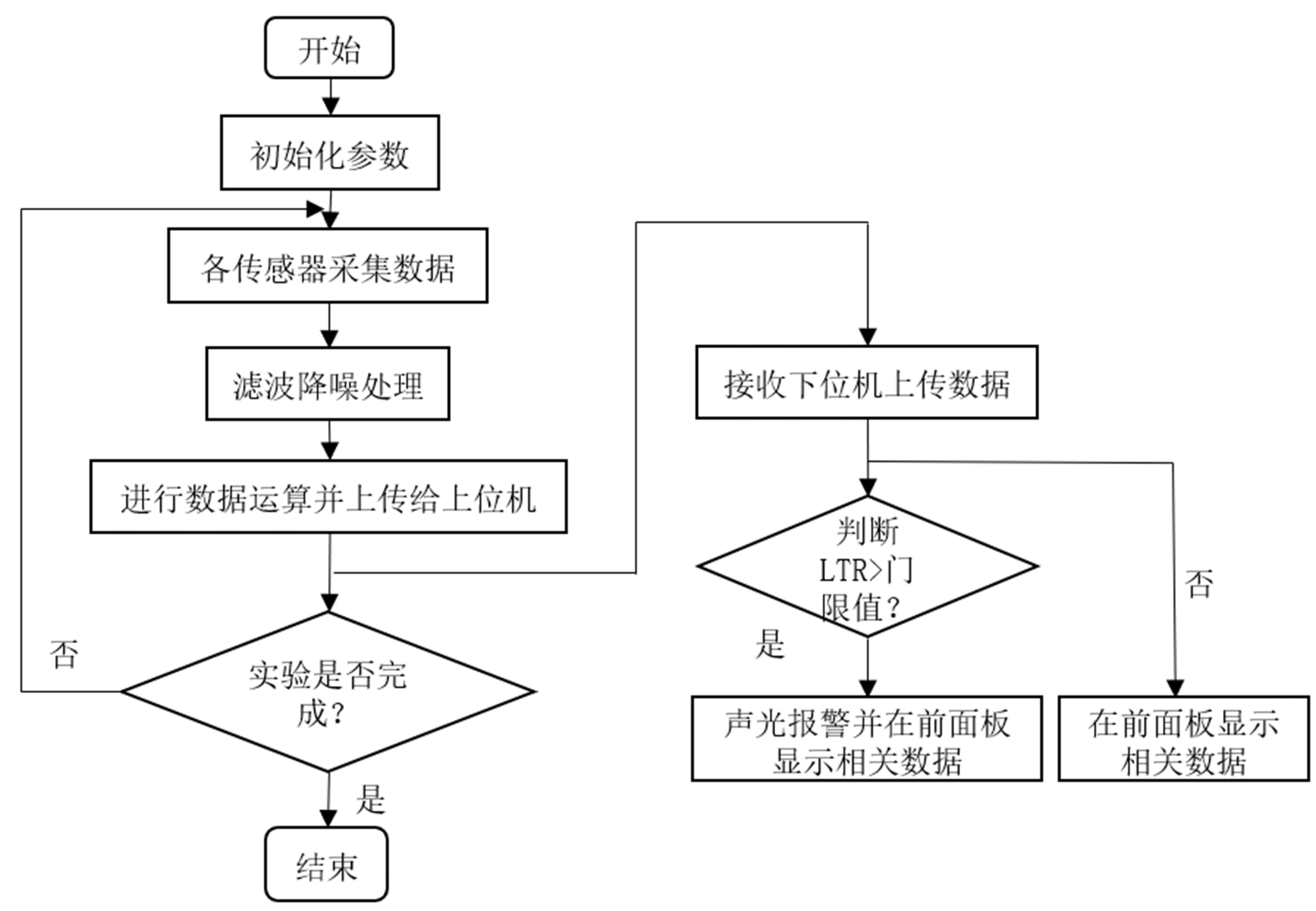
圖3 軟件流程圖
3 側翻預警監控平臺設計
3.1 前面板設計
車輛側翻在線監測系統的前面板如圖4所示。分別有串口連接區、計數區、數據輸入區、數據清除區、圖表顯示區。串口連接區用來配置好參數,溝通Labview和stm32的連接,計數區實時顯示stm32傳來的數據總數和單次傳送數據的數目以及共傳送數據的次數。數據輸入區用來標定車體數據輸入參數。圖表顯示區用來顯示處理后的各參數數據。

圖4 前面板界面
3.2 程序框圖設計
Labview程序框圖如圖6示,主要由數據讀取模塊、數據檢索模塊、數據處理模塊和數據保存模塊組成[8]。
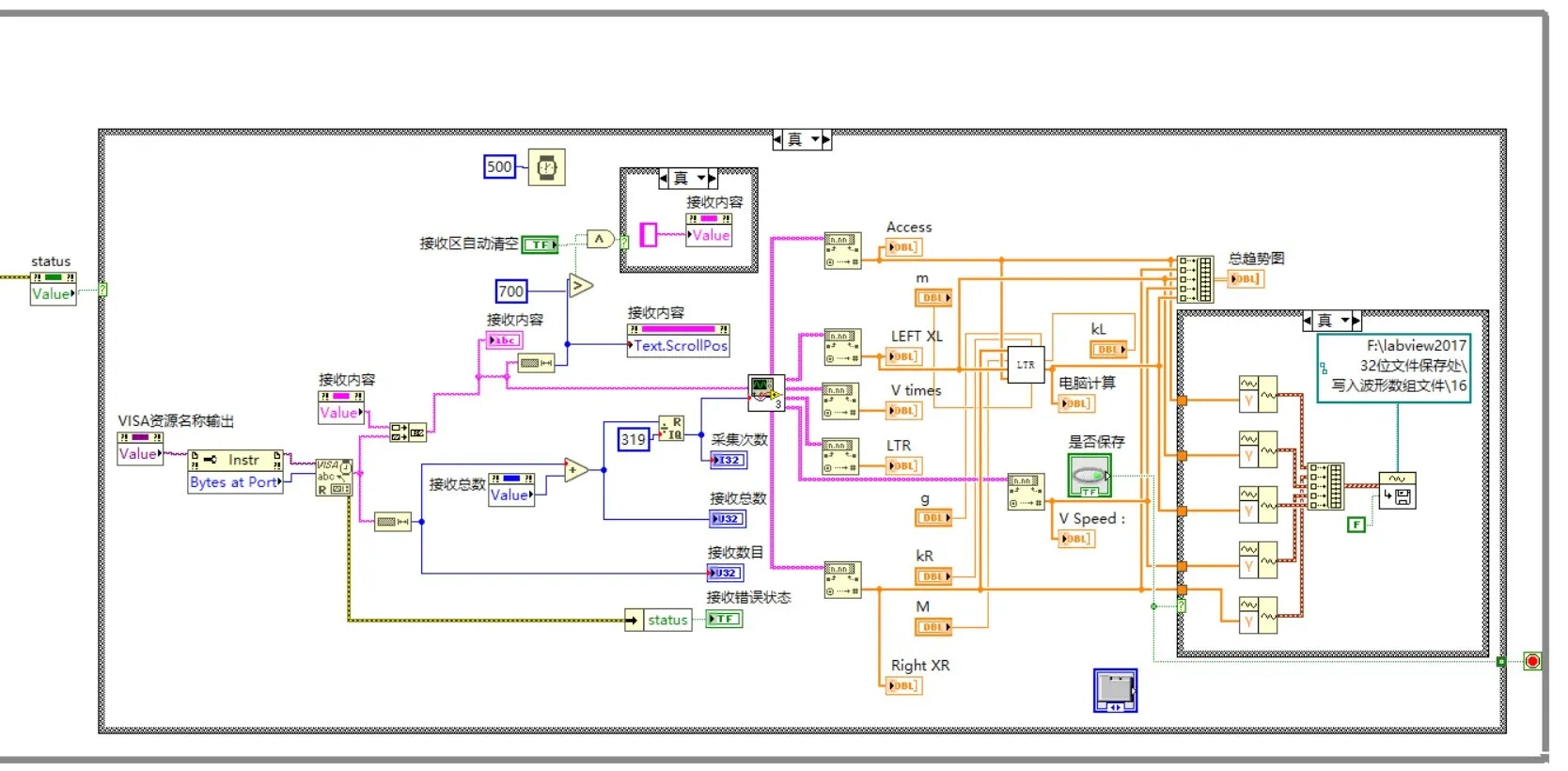
圖6 Labview主程序框圖
數據讀取模塊利用VISA模塊里的函數對stm32串口信息進行配置、緩存、讀取和關閉[9]。該模塊在編寫時,利用屬性節點,設置停止再啟動時數據自動清零和防止誤操作功能,具體內容如圖5所示。數據檢索模塊檢索單片機處理后的數據內容。數據處理模塊利用字符串至數值函數,將檢索出來的字符串數據轉換成數值數據。數據保存模塊的任務是將實時采集得來的數據保存,這里將數據轉換為波形數據,并通過寫入波形至文件保存,在數據保存命令按下的同時,程序自動停止運行。將保存的數據存入安排好的文件路徑中,后續的工作是把采集得來的數據,進行數據回放分析。為突出模塊化設計,將各模塊單獨編寫為子VI的模式,方便日后維護。
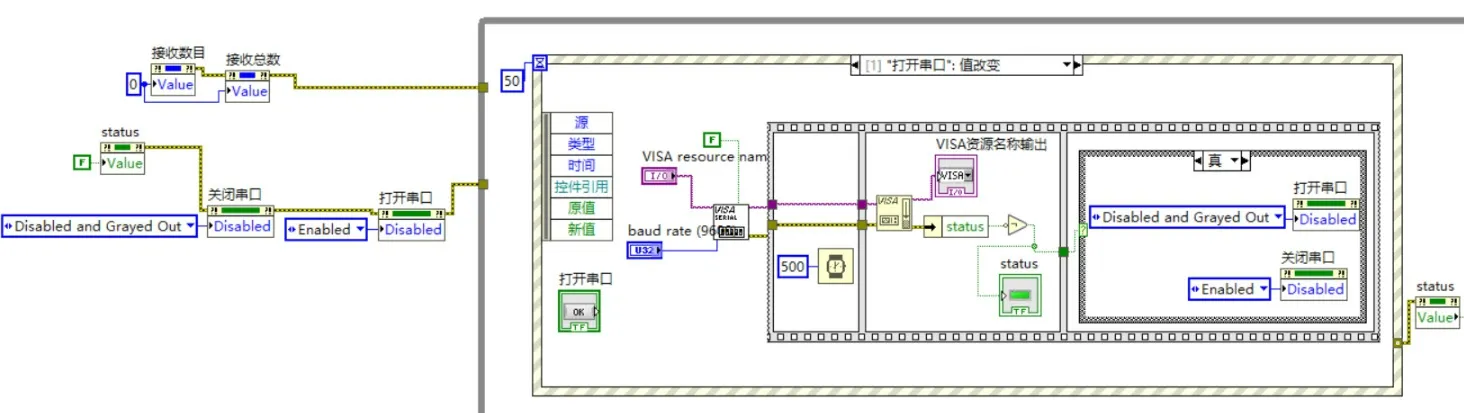
圖5 串口數據采集
4 系統測試
為探究車速、側向加速度、簧載位移和橫向載荷轉移率的關系,將系統測試分為靜載荷測試和動載荷測試兩種方案。
首先,進行靜載荷實驗,目的是驗證搭建平臺的可行性,及硬件電路的是否正常連接。將車輛模擬平臺上電運行,待工作平穩后,打開由Labview軟件開發的大型重載車輛側翻在線監測系統進行在線監測,采集到一定的數據點后。利用編寫的數據處理程序對采集的數據進行離線分析。在靜載實驗下,左、右兩處簧載位移下降值分別約為7.4mm和4.62mm,車速約為為0.72m/s,LTR值近似為0,車輛處于平穩運行狀態,同時,將Labview采集到的左、右位移傳感器值與傳感器本身實時數值做進一步分析。如表2所示。通過分析表2中數據,可以發現測試平臺采集得到的數據與實時數據的誤差均在5%范圍內,屬于合理范圍之內,因此,可以確定所搭建的測試平臺,符合設計需要。

表2 靜載荷試驗下左、右位移傳感器相對誤差
動載荷測試為模擬車輛做曲線運動時,進行的測試方案。選取干燥的瀝青路面作為測試條件,摩擦系數為0.75,保持車速約為0.72m/s。在動載荷下采集數據,如圖7所示。在圖7(a)中,明顯發現左右位移出現較大變化,在采集次數為300至400間,車輛有側傾跡象。選取通道,放大LTR值,如圖7(b)所示,LTR值在該區間也存在明顯波動,峰值在0.85處,未達到1。經過分析發現,建立的模型平臺與實車參數結構存在一定差別,建立的數學模型未考慮車輛懸架的非線性及輪胎等參數對車體的影響。可以通過控制對側翻閾值的取值范圍,進行預警判斷。綜上分析,該系統能夠檢測小車模擬平臺的運動狀態,對應的變化曲線在一定程度上反應出側翻姿態和LTR的相互關系,也從側面驗證側翻模型具有一定的可靠性。為以后改進方案設計提供一定的數據支撐。
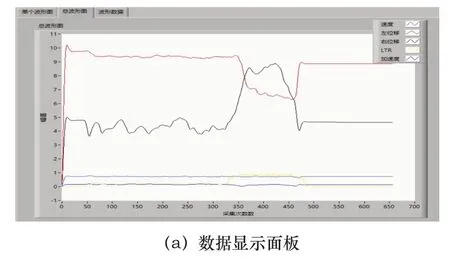
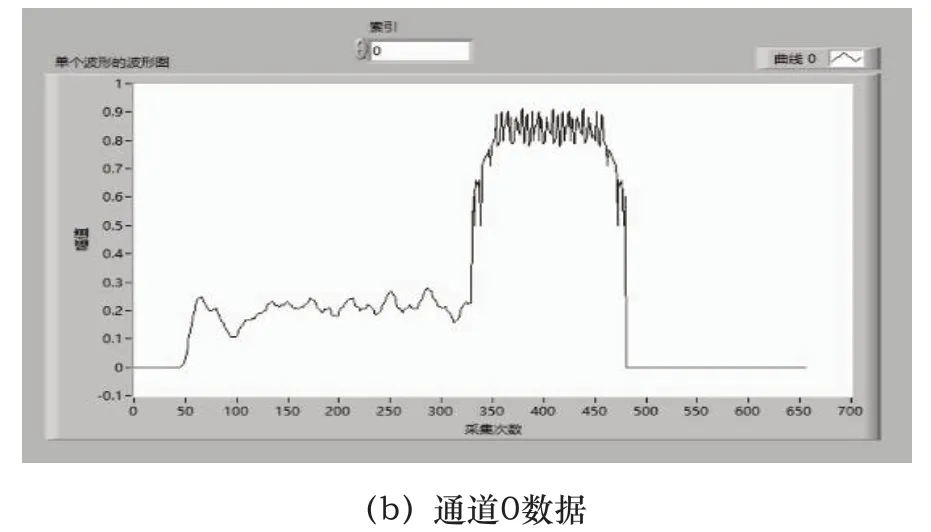
圖7 動態載荷采集數據前面板
5 結語
本文借助Labview軟件開發了用于車輛側翻在線監測系統,該系統利用各模塊相互配合,完成對數據讀取、顯示、保存和回放的操作。實現了對車輛行駛過程中各參數實時監測。同時,stm32單片機和NRF24L01的搭配,可以高效、穩定地將采集的數據傳送給Labview平臺,解決了有線連接造成的實驗操作不易問題。利用Labview良好的人機交互和較高的可視化功能,實現對數據的采集、處理和分析,為實驗者提供了一定具有參考性實驗數據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19