工業(yè)機器人軌跡規(guī)劃研究
2021-12-26 11:55:22張小紅
科教導刊·電子版 2021年33期
關鍵詞:規(guī)劃
張小紅
(平頂山技師學院 河南·平頂山 467000)
工業(yè)機器人必須要經(jīng)過一個設定好的路徑才能完成一項任務,到達工作點之后進行作業(yè),因此要提前規(guī)劃工業(yè)機器人的運動路徑。軌跡規(guī)劃的好壞是保證工業(yè)機器人是否能夠準確的運動從而完成特定任務的基礎,因此需要設計一條軌跡最大程度上能夠接近目標路徑,使機器人的初始位態(tài)經(jīng)過實際路徑到達用戶給予的目標位態(tài),然后求出各關節(jié)的速度、加速度以及位置的過程[2]。一個好的軌跡規(guī)劃方法,不僅可大大提高機器人的工作效率,還能夠保證機器人穩(wěn)定準確的運行,并且降低了機器人各關節(jié)之間的磨損。
1 關節(jié)空間軌跡規(guī)劃方法
工業(yè)機器人軌跡規(guī)劃方法主要有:關節(jié)空間軌跡規(guī)劃和笛卡爾空間軌跡規(guī)劃。關節(jié)空間軌跡規(guī)劃就是把機器人的關節(jié)變量轉(zhuǎn)換成和時間有關的函數(shù),再對六軸機器人的角速度和角加速度進行約束。笛卡爾空間軌跡規(guī)劃是將在笛卡爾空間中機器人末端的位移、速度和加速度轉(zhuǎn)換成時間的函數(shù)。現(xiàn)主要研究關節(jié)空間中軌跡規(guī)劃。
機器人運動中所經(jīng)過的點通常由其在空間中的位置表示,因此在路徑規(guī)劃之前,首先,利用逆運動學將運動路線中的點變換為角度值,再操作每個關節(jié)進行函數(shù)擬合,以便函數(shù)盡可能地通過所有預設點,到達目標點完成工作任務。雖然擬合的每段軌跡之間沒有相關性,但為保證每個桿件都可以同時到達目標點,就要使每個關節(jié)有相同的運動時間,以使機器人達到預期的位姿狀態(tài)并完成工作任務。
關節(jié)空間軌跡規(guī)劃方法是用關節(jié)角度的函數(shù)來描述機器人的運動路線,所以起始點和目標點之間的形狀是不需要考慮的。要對關節(jié)空間進行路徑規(guī)劃,先要知道機器人的起點和終點相對于基坐標系的位置和姿態(tài),再求解它的逆運動學,得出對應點各關節(jié)的角度值,并選擇插值函數(shù)進行擬合和插值,得出機器人末端的瞬時角位移、速度和加速度隨時間變化的曲線。當對機器人關節(jié)插值時,某些約束應滿足,比如:開始點、放下點和終止點,對于這些點的位姿、速度以及加速度的情況要求已知,另外各個關節(jié)的角位移、速度和加速度還需確保連續(xù)平滑。上述條件在滿足以后,就可以規(guī)劃機器人的運動軌跡,在規(guī)劃過程中通過選用不同的插值函數(shù),此時就得到不同的軌跡曲線。
在關節(jié)空間中插值的時候,可依據(jù)設計變換函數(shù),較為常用的插值函數(shù)為三次多項式插值、五次多項式插值和拋物線過渡的線性插值函數(shù)。插值函數(shù)選用的不同得到的運動軌跡也不一樣,比如使用三次多項式插值,雖然運算過程相對簡單些,但得到的軌跡有出現(xiàn)不連續(xù)情況的可能。而使用五次多項式插值就不會出現(xiàn)這種現(xiàn)象,雖然它的插值計算方法和三次多項式類似,但是能得到相對比較平滑的軌跡。拋物線過渡的線性插值函數(shù)是在簡單線性插值函數(shù)基礎上改進的方法,使簡單線性插值函數(shù)在起點和終點處出現(xiàn)的問題得以改善。
1.1 三次多項式插值
三次多項式插值多用于機器人起點和終點速度為零的情形,限制關節(jié)在起點和終點的角度值,確定機器人運動路徑兩端點的位置角速度為定值。設關節(jié)角滿足以下式子。
指定三項插值的經(jīng)過點,經(jīng)過MATLAB仿真得出三項插值的位置、速度和加速度[3]圖形如圖1所示。由圖可知,只要給定離散點的位置速度和時間,就可以插補出一段連續(xù)平滑的曲線。但是此種方法的角加速度并不是連續(xù)的,因此對于需要考慮角加速度的運動,此種方法并不適用。
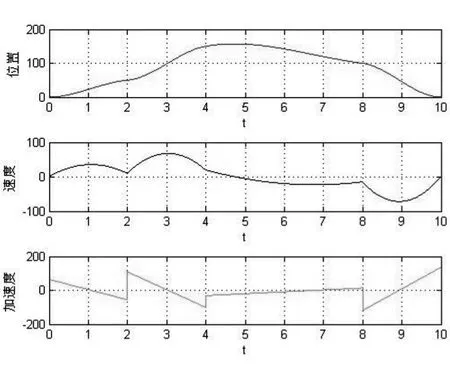
圖1:三次多項式的位置、速度和角加速度
1.2 五次多項式插值
利用三次多項式插值,根據(jù)經(jīng)過點的軌跡的特點得出位置和速度是連續(xù)的,但是加速度是不連續(xù)的。雖然三次多項式預定的軌跡有一定“平滑”,但是這種方法對一些動力學和慣性載荷的應用會產(chǎn)生影響。想要得到連續(xù)的加速度軌跡,位置和速度要有合適的初始和終止條件,以及合適的初始和終止加速度值。這樣方式有六個邊界條件,因此需要采用五次多項式。
在五次多項式插值中,角位移、角速度和角加速度的函數(shù)表達式可表示為:
相對于三次多項式插值方法,增加了對起始點的角速度的約束。
指定的五階多項式插值的經(jīng)過點,通過MATLAB仿真得出五次多項式插值的位置、速度和角加速度如圖2所示。由圖可知,角加速度是連續(xù)的,并沒有跳變情況出現(xiàn)。
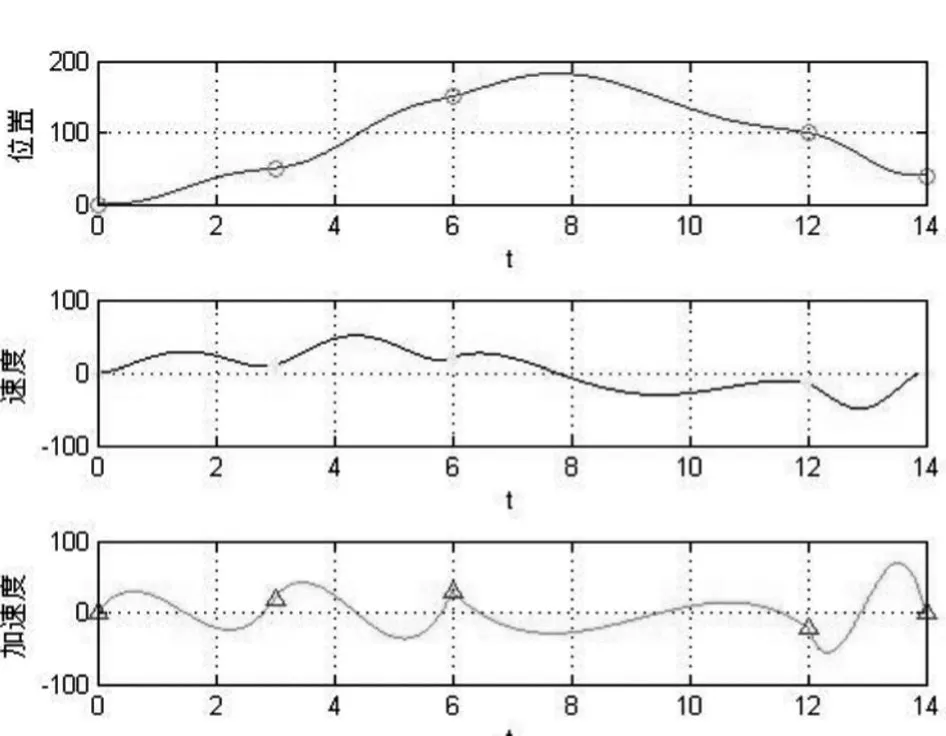
圖2:五次多項式插值下的位置、速度和角加速度
2 結(jié)論
本文研究了關節(jié)空間中軌跡規(guī)劃的插值方法,即關節(jié)空間下的三次多項式插值和五次多項式插值,利用Matlab對三次多項式插值和五次多項式插值進行仿真實驗,通過仿真結(jié)果可以看出,五次多項式在加速度方面優(yōu)于三次多項式的結(jié)果。
猜你喜歡
房地產(chǎn)導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
