基于機器視覺的智能垃圾分揀機器人的設計
2021-12-21 08:14:36周旭華伍懿美黃曉茹翁嘉欣
裝備制造技術 2021年8期
周旭華,伍懿美,黃曉茹,翁嘉欣
(河源職業技術學院,廣東 河源 517000)
0 引言
隨著科技的發展和進步,人們的生活水平逐漸的提高,科技產品的使用也越來越普及,一切都向著智能化發展[1-3]。現在,智能機器人的數量和適應場景的復雜性也在增加,這也顯示出對智能機器人的精確性,耐用性和靈活性等性能有更高的要求。機械臂技術的應用已越來越普及,已逐漸滲透到軍事、航天、醫療、日常生活及教育娛樂等各個領域,慢慢取代了人類的勞動,尤其是代替人不能到或不適宜去的、有危險的環境中,工業自動化對機器人的智能化水平依賴也越來越高,機械臂的發展越來越受到重視[4-5]。
本文設計了一種以AT Mega328(Uno)為主控元件的六自由度機械臂智能垃圾分揀機器人,包括硬件、軟件和機械等部分,能夠實現上位機和下位機的通信及控制,本文制作的樣機能夠滿足高職院校汽車智能化專業的實訓教學,通過對樣機進一步優化,還能應用在貨物搬運、智能巡邏等領域,該機器人的研究符合我國人工智能技術的政策發展趨勢,具有很好的實用價值,具有很好的推廣應用前景。
1 智能垃圾分揀機器人總體設計
垃圾的分類有很多種,本文設計利用顏色來代替不同種類的垃圾[6-8]。智能垃圾分揀機器人系統的主要結構為機械臂,視覺功能模塊和藍牙通信技術,在面對不同場合需求時,需要設計不同的動作組來實現機械臂的運動路徑,也就是說控制各個舵機的轉動角度,本系統視覺功能模塊設計中,利用星通科技提供的OpenMV 視覺模塊來完成物體顏色識別,在編程中設計三組顏色(紅黃綠)來代替三種類型的垃圾,通過OpenMV 攝像頭的識別來檢測目標物體,最終將顏色信息通過藍牙模塊傳遞給基于Arduino單片機的開源舵機控制板,從而實現機械臂的顏色自動分揀。
設計的智能分揀機器人,首先由視覺模塊先完成顏色識別功能,同時設計機械臂的動作組,視覺模塊識別物體顏色是否為目標顏色,如是目標物體,則將結果發送給機械臂的控制板,控制板根據所得的信息進行控制機械臂做出對應的動作組,整體設計流程圖如圖1 所示。
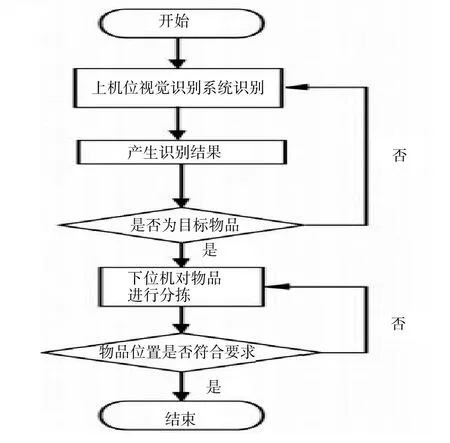
圖1 系統結構框圖
2 硬件設計
2.1 硬件結構設計
本系統主要有四個模塊:一是機械臂的主控模塊;二是機器的視覺模塊;三是機械臂模塊;四是藍牙通信技術。使用Arduino 編程的開源舵機控制板控制機械臂操作的運動,并連接藍牙模塊與OpenMV視覺模塊進行串口通信。其系統的硬件設計框圖如圖2 所示。
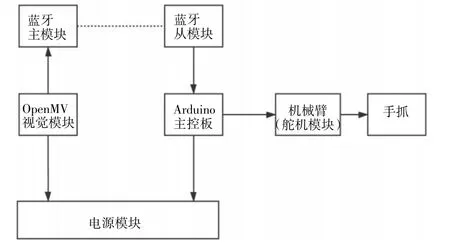
圖2 系統的硬件設計框圖
2.2 硬件電路設計
硬件部分包括OpenMV 模塊1 個,藍牙模塊2個,Arduino 控制板1 塊,數字舵機6 個,機械爪1個,旋轉底座1 個,U 型支架4 個,鋰電池1 個。整體設計硬件電路及實物如圖3 所示。
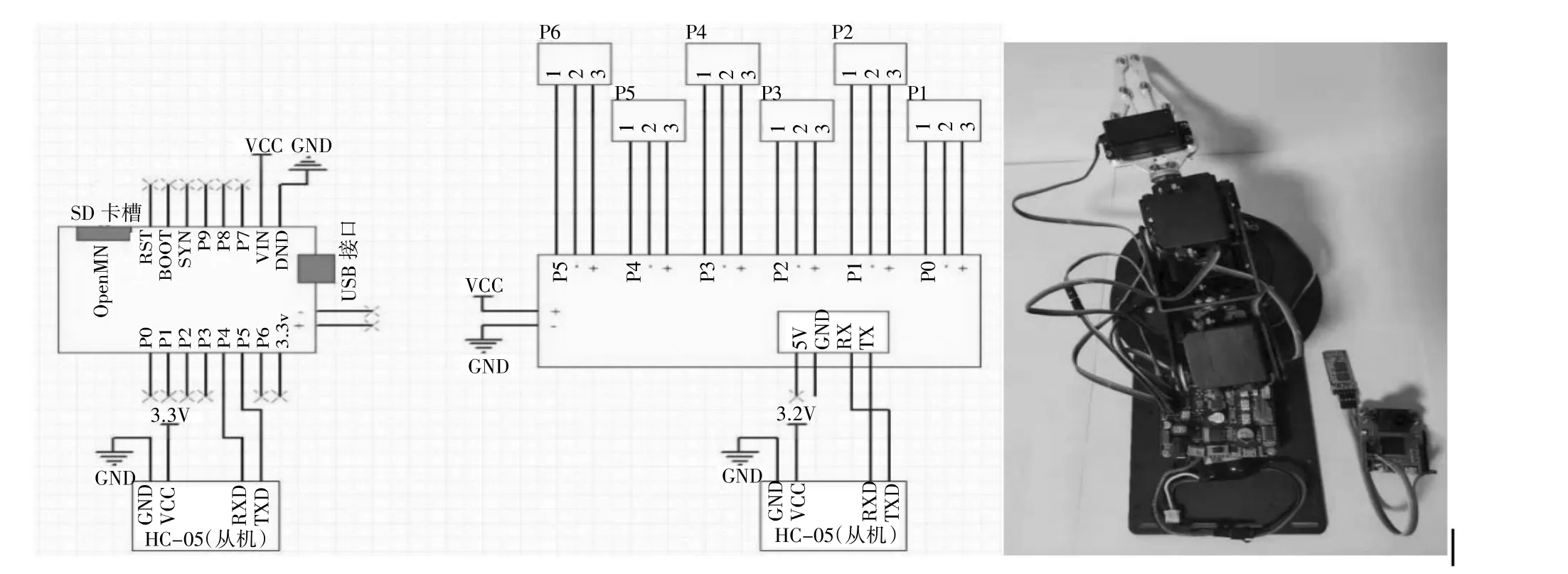
圖3 整體硬件電路圖及實物圖
3 軟件設計
智能分揀機器人整體的軟件設計開發環境有Arduino IDE 和OpenMV IDE。這兩個軟件系統的共同特點就是擁有豐富的開源功能代碼庫和通俗易通的編程操作。本文主要通過Arduino 編程來控制舵機的轉動和連接藍牙,從而實現機械臂的動作操作。通過OpenMV IDE 編程來對物體進行顏色識別。
3.1 藍牙模塊
藍牙模塊程序設計流程圖及部分程序如圖4 所示。
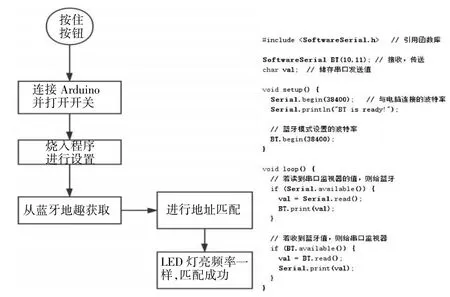
圖4 藍牙模塊程序設計流程圖及部分程序
3.2 機械臂模塊
通過Arduino 編程來控制舵機的轉動,從而實現機械臂的動作操作。其機械臂程序流程圖如圖5 所示。

圖5 機械臂模塊程序設計流程圖及部分程序
3.3 視覺模塊
通過OpenMV IDE 編程來對物體進行顏色識別,將識別的顏色結果輸出給Arduino 控制板,當識別到紅色物體則發送“red”,綠色“green”,藍色“blue”,以字符串的形式由藍牙模塊發送出去,然后Arduino 板從藍牙從模塊中讀取,進行判斷是否為目標顏色,從而實現機械臂的分揀動作。其視覺模塊顏色識別部分程序流程圖如圖6 所示。
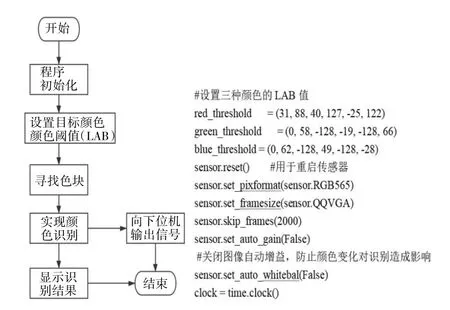
圖6 視覺模塊顏色識別部分程序流程圖級部分程序
4 測試
測試部分主要檢測OpenMV 視覺模塊識別目標顏色是否正確以及檢測機械臂是否能正確抓取。首先將符合設定顏色的積木進行位置的擺放,并指定最終放置目標物體的位置。當視覺模塊檢測到目標顏色時,從IDE 界面中攝像頭的圖像里能看到,目標顏色的物體被矩形方框框起來,如圖7 所示。
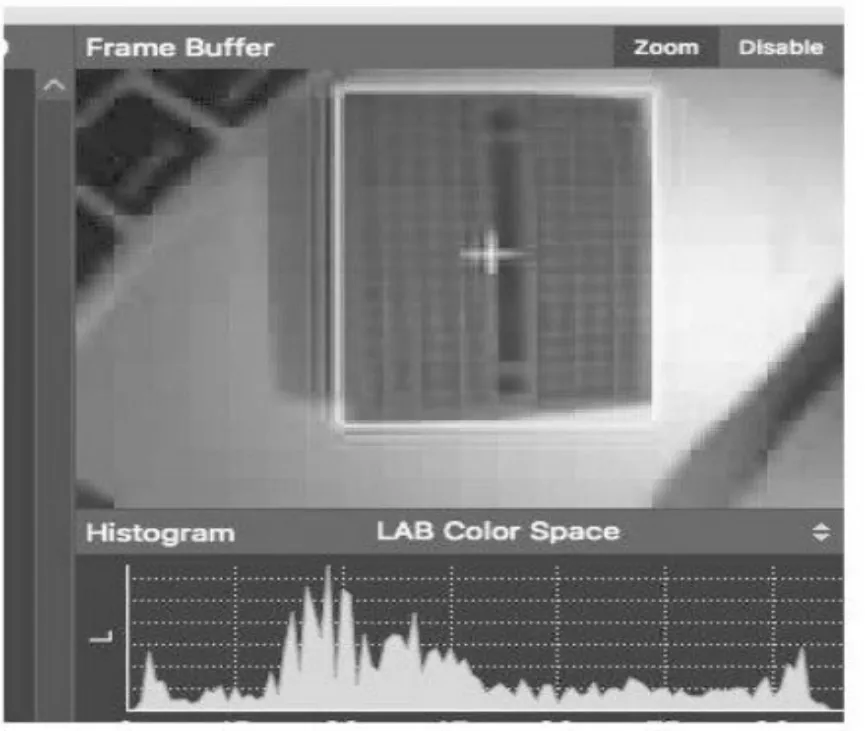
圖7 視覺模塊識別目標顏色
經過多次的測試,智能分揀機器人總體的性能是良好的,OpenMV 攝像頭獲取的圖片后處理的信息基本是有效的,能把目標物體的顏色信息通過藍牙串口傳送至主控板,主控板獲取的信息后,能夠有效準確的控制機械臂進行抓取目標物體,機械臂抓取后能正確的將物體放置在指定的位置。但是OpenMV 在進行識別物體顏色時,如果背景顏色和目標物體的顏色過于接近的話,那么則會出現多個色塊識別的情況,不能分離出背景和物塊。如果在實驗環境下光照過強或著過暗,那么識別的物塊顏色可能會有點偏差。
5 結論及應用
設計了一種以AT Mega328(Uno)為主控元件的六自由度機械臂智能垃圾分揀機器人,包括硬件、軟件和機械等部分。文中給出了系統的硬件設計方案以及流程圖,同時給出了軟件系統設計方法。系統實現了上位機通過藍牙發送指定字符串、機械臂通過藍牙接收字符串和控制機械手臂的功能,并能實現機械臂回到初始位置,在設計時,由于需要測量的距離范圍固定,采用了量尺測量法。軟件主要分為顏色識別模塊和無線通信模塊、數據處理模塊這三大模塊,軟件的這種“自頂向下”的模塊化軟件編程方法,能使軟件的結構更清晰,并有利于軟件的調試和修改。經過調試,該機器人能夠實現發送指定字符串到機械臂然后機械臂工作。
目前,該機器人已經應用于我校汽車智能化專業的實訓教學中,能夠滿足基本教學,在將該機器人的硬件和軟件部分進一步優化,還能應用在貨物搬運、智能巡邏等領域,該機器人的研究符合我國人工智能技術的政策發展趨勢,具有很好的實用價值。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09