多系統融合精密單點定位在機載雷達電力線巡檢中的應用
2021-12-14 08:32:06孟昊韓保民王勝利王進
全球定位系統 2021年5期
孟昊,韓保民,王勝利,王進
( 1. 山東理工 大學 建筑工程學院,山東 淄博 255000;2. 山東科技大學 海洋科學與工程學院,山東 青島 266590;3. 山東科技大學 測繪與空間信息學院,山東 青島 266590 )
0 引 言
機載激光雷達(LiDAR)測量系統是集激光技術、計算機技術、高動態定姿技術,高精度全球衛星導航系統(GNSS)動態定位技術于一體的高新技術手段. 機載LiDAR 測量系統能夠獲取高精度的三維(3D)地理空間數據,結合航空相機、電荷耦合器件(CCD)相機等,可以為地球空間信息智能化的處理提供新的多源融合數據[1]. 機載LiDAR 的高精度定位,在電力線巡檢工作中得到廣泛地應用,將機載LiDAR測量系統生成的多源融合數據經過處理,生成可視化的3D 點云數據,為后續的電力線點云分類識別和危險點檢測等提供基礎[2].
機載LiDAR 測量系統主要由激光掃描儀,機載GNSS 接收機,慣性導航系統(INS)和成像CCD 相機組成. 其中機載GNSS 接收機和INS 提供空間位置、姿態信息及飛行軌跡,它的精度將直接影響電力線分類識別的精度[1]. 現在常用的GNSS 動態測量技術主要是在無人機航線上布設一定密度的地面控制點,并將控制點作為基準站進行GNSS 差分運算. 但根據實際情況,我國電力線走廊大多跨越深山、密林、湖泊等地形復雜地區,架設基準站較為困難,在幾千公里長的輸電線路走廊中使用此種方法不僅經濟成本高而且基站難以順利架設[3]. 而連續運行參考站(CORS)能提供相同等級的定位精度,在電力線巡檢工作中,通常要跨越幾千公里,途徑數省. 現在CORS基站主要分布在交通發達的中東部地區,分布不均勻,且申請CORS 網絡極為繁瑣[4].
精密單點定位(PPP)技術由于其單站作業、精度不受距離影響等優點,逐漸成為廣域或全球范圍內定位的新技術. PPP 技術是利用國際GNSS 服務(IGS)提供的精密衛星軌道和精密鐘差產品,僅用一臺GNSS 接收機就能實現全球精密絕對定位的技術[5].PPP 能夠為我們提供長距離、高精度的事后動態解決方案,為電力線巡檢工作提供了一種新的方法與思路,提高了外業作業的效率,節約了經濟成本. 近年來,隨著GNSS 系統的不斷發展,多系統GNSS 數據處理已成為一種發展趨勢,多系統GNSS 增加了可視衛星的數目,極大地優化了衛星的空間幾何結構,提供了更豐富的頻率和信號[6-7]. 通過組合不同的GNSS,與相應的單個GNSS 相比,定位的準確性和可用性得以提高. 在城市、峽谷等困難的測量環境中,衛星信號通常會受到干擾. 通過使用多個GNSS,可用信號的數量會增加,可以選擇最佳的信號組合. 目前,多系統GNSS 并存是不可逆轉的趨勢,IGS 的多模GNSS試驗跟蹤網(Multi-GNSS Experiment,MGEX)已經有多個國家加入,MGEX 在全球已有120 多個測站,我們可以通過MGEX分析中心及其他數據網站,如IGS、全球連續監測評估系統(iGMAS)獲得多系統GNSS 精密衛星軌道和精密鐘差改正等產品. 隨著中國北斗三號系統(BDS-3)的建成以及俄羅斯GLONASS 系統的恢復,任曉東等[8]研究了四系統GPS、GLONASS、Galileo、BDS 融合數據的PPP 收斂速度以及定位精度. 實驗驗證了在單系統幾何構形條件差的區域,多系統的定位精度提高約10%~30%. 袁修孝等[9]將雙頻動態的GPS PPP 與差分GPS 定位獲取的攝站坐標進行對比,兩者的精度基本一致. 張小紅等[10]利用GPS/GLONASS組合系統驗證了雙系統的收斂速度和定位精度都是優于單系統的. 吳俊等[11]利用IMU/PPP 輔助航空攝影測量技術,對實測項目進行分析,結果表明,用GPS/IMU 輔助航空攝影測量能夠滿足大比例尺成圖的應用. 張榮斗等[12]結合實際項目,采用PPP 與DGPS 兩種方法,分別對三個區域進行航飛,解算POS 數據比較分析,平面精度為10 cm,高程精度約為15~40 cm. 杜躍飛等[3]將基站差分解算的定位結果作為基準,比較了單系統PPP 和三系統PPP 點云數據的精度,與基站差分下的點云數據距離偏差在10 cm 以內,驗證了三系統PPP 在點云處理的精度要優于單系統PPP 且能夠進行電力線精細巡檢.
本文提出將多系統融合PPP 應用到機載LiDAR點云電力線巡檢中,通過實測數據進行實驗,分別解算基站差分定位、單系統PPP、多系統PPP 三種定位方式生成的POS 數據,然后將三種方式生成的點云坐標與已知平面控制點進行檢核,驗證多系統PPP 精度是否能夠精細分離電力線,滿足電力線巡檢的要求.
1 PPP 與機載LiDAR 測量原理
多旋翼無人機搭載LiDAR 測量系統,首先將各傳感器通過硬件固定它們的相對位置,嚴格控制傳感器的時間同步. GPS 接收機用來獲得位置信息,慣性傳感器(IMU)用來獲得姿態信息,經由傳感器發射的激光束在地物上反射后,由機載LiDAR 測量系統的接收裝置接收. 根據發射和接收的時間間隔t,便可以獲得傳感器與地物的空間距離. 根據GPS 接收機獲得的傳感器位置信息 (Xs,Ys,Zs) 和方位角信息(φ,ω,κ)利用三角測量的相關理論方法計算得到地物的3D 空間坐標 (XR,YR,ZR) :
式中,R為發射點到地物點的空間距離. 傳感器位置信息是由GPS 獲取的,傳感器發射信號的方向信息是由INS 獲取的,這樣就能精準的得出每一個點云的大地坐標值. 因為機載LiDAR 系統是由多個部分組成的,所以它存在多個坐標系統,地物點的空間位置需要經過一系列的坐標轉換才能得到.
550 kV 電力線巡檢距離跨度大,需要統一基準,而實時動態(RTK)作業距離短,精度隨距離增加而降低,導致局部地區測量精度差異較大;PPP 定位精度高,能夠滿足巡檢要求,獲得的是全球坐標框架下的絕對坐標,基準統一,測量精度均勻,只需要單個測站,不需要架設基準站,作業成本低,所以本文采用PPP 提供機載LiDAR 測量中的定位信息.
目前,多系統GNSS 星座、MGEX 跟蹤網、多系統的精密軌道和精密鐘差產品的發布趨于成熟,精度不斷提升,多系統GNSS PPP 的數據處理理論算法不斷完善,可以實現穩定可靠的高精度定位服務[13],因此,文章提出了將多系統PPP 應用到機載LiDAR 觀測系統中,能夠有效地節約電力線巡檢的經濟成本.載波和偽距是GNSS 接收機接收到的原始觀測量,利用載波和偽距建立位置關系的原始觀測方程.

觀測方程經過線性化,得到多系統PPP 的觀測方程,考慮其頻間偏差(IFB)和系統間偏差(ISB)的影響,文中采用無電離層組合觀測模型.
文中的隨機模型采用正弦函數高度角定權,參數估計方法采用擴展卡爾曼濾波,卡爾曼濾波根據先驗信息和新的觀測信息來進行狀態更新,待估參數為接收機位置、接收機鐘差、天頂對流層延遲(ZTD)的濕分量和無電離層組合的模糊度. 卡爾曼濾波求解包含狀態一步預測和量測更新,其中狀態一步預測是根據前一時刻的狀態值來預測當前時刻的狀態值,量測更新是根據量測值和預測值更新當前時刻的狀態值.
2 研究區概況
本項目采用六軸無人多旋翼小型無人機搭載RieglVUX-1HA 激光掃描儀、NovatelPwrpak7 型GNSS接收機. 將各個傳感器之間進行精確地時間同步,固定硬件之間的相對位置,使用GNSS 接收機進行定位,用IMU 進行定姿[14]. 如圖1 所示,研究區域為江蘇省500 kV 伊上5251 線,該輸電線路于2005 年投入運行,線路起止點為:500 kV 伊蘆變至500 kV 上河變,全線共有桿塔283 座,全線長119.028 km. 自南向北經過淮安市、連云港市. 線路西部有G25 和G204公路,S327 和S328 公路橫穿線路,沿線村莊交通便利. 采用基站差分模式,需多次進行基準站架設,要將基準站架設到指定位置,浪費人力物力且經濟成本較高.
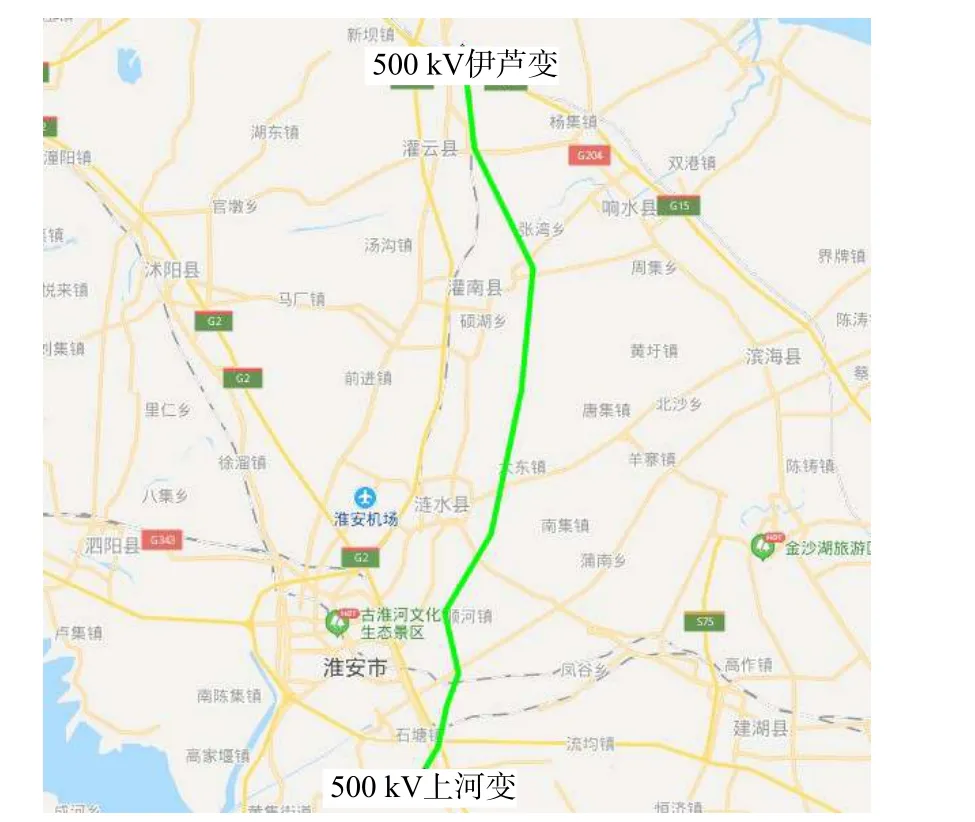
圖1 500 kV 伊上5251 線路示意圖
3 數據處理
使用武漢大學數據中心提供的MGEX 的多系統的精密軌道、精密鐘差. 經過預處理之后,用卡爾曼濾波將預處理的GNSS 數據與IMU 數據進行融合,生成軌跡,按一定的采樣率輸出坐標、姿態等信息.數據處理流程如圖2 所示.

圖2 點云數據處理流程
3.1 不同定位方式解算POS 數據
如圖3 所示,實驗對伊上5251 線路上部分數據進行解算,在GoogleEarth 軌跡中,根據預先設定好的航線進行飛行,無人機首先進行“8”字飛行,然后進入測區往返飛行,確保點云數據的完整采集. 基站架設在線路附近,沒有遮擋的地方. 根據點云數據處理流程分別對基站差分、單GPS 系統PPP、多系統PPP解算POS 數據,進行定位精度的分析. 圖4(a)為用基站差分解算得到的東(E)、北(N)、天(U)位置均方根誤差(RMSE),圖4(b)為用單GPS 系統PPP 解算得到的E、N、U 位置RMSE,圖4(c)為用多系統PPP 解算得到的E、N、U 位置RMSE.
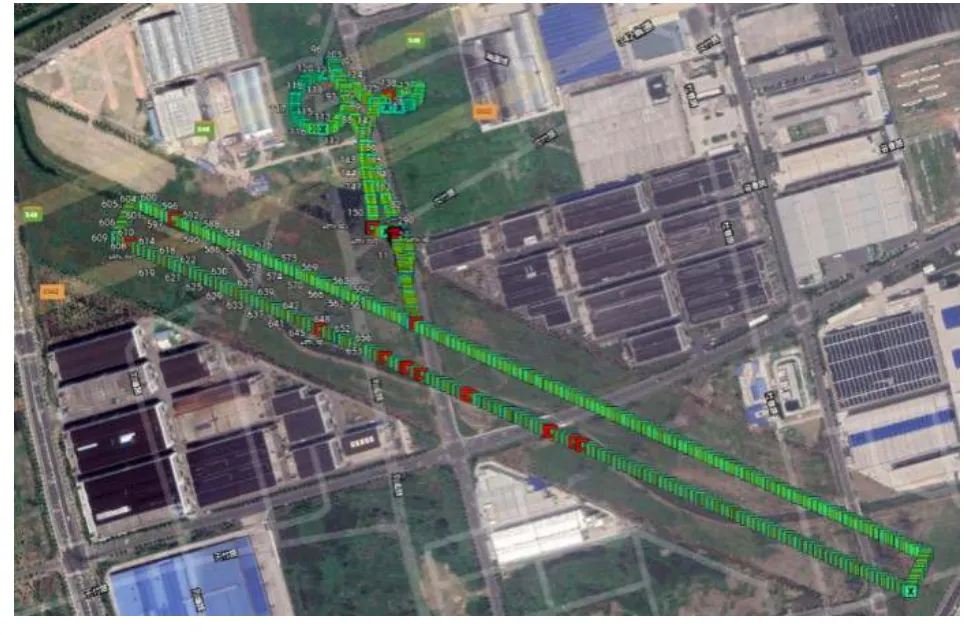
圖3 無人機飛行路線
由圖4(a)可知,基站差分E 方向收斂到0.004 m,N 方向收斂到0.004 2 m,U 方向收斂到0.007 m,在203 400 歷元附近,收斂出現波動,主要原因是在該區域無人機處于半空懸停狀態,無人機震蕩,導致衛星失鎖. 由圖4(b)可知,單GPS 系統PPP 在E 方向收斂到0.014 5 m,N 方向收斂到0.011 0 m,U 方向收斂到0.009 4 m. 由圖4(c)可知,多系統PPP 在E 方向收斂到0.008 7 m,N 方向收斂到0.007 8 m,U 方向收斂到0.012 9 m. 從點云數據所需精度來看,三種定位方式都符合要求. 與單系統PPP 相比,多系統PPP在U 方向提高了12%,在E 方向提高了21%,在N方向提高了17%. 同時,收斂速度比單系統PPP、差分GPS 都要快.
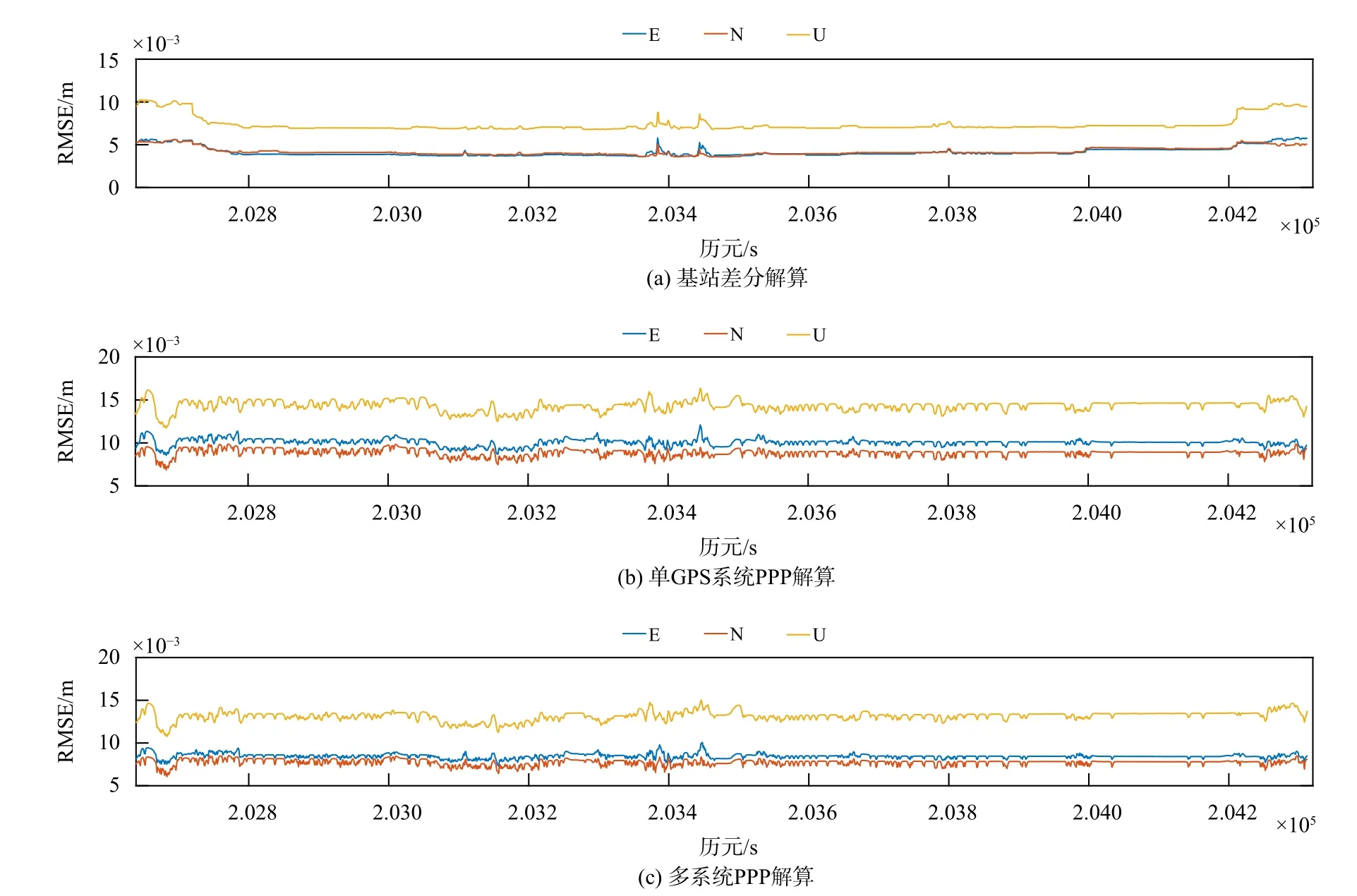
圖4 三種定位方式POS 數據精度
3.2 點云精度檢核
處理完POS 數據之后,結合LiDAR 數據和圖像數據,利用VSursPROCESS 軟件生成3D 點云數據,本工程在20 km的實驗區域內,將兩個塔基處分別布設一組檢查點. 檢查點分為平面檢查點和高程檢查點,平面檢查點選擇在具有地物特征處,如道路拐角、房角等. 如周邊無特征點則應在地表制作標志點,間距在5~10 m,平面檢查點需要制作點之記,方便內業進行平面位置判讀從而進行精度評定. 高程控制點選取地表變化連續且無植被覆蓋的地方,高程控制點無需制作點之記. 將三種定位方式生成的POS 數據,結合機載LiDAR實測數據,導入到VSursPROCESS 數據預處理軟件中生成點云坐標,對于激光點云精度,將內業激光點云解算的結果與外業測區布設檢查點的高程進行對比,獲得三種解算方式的高程精度;將外業布設的平面檢查點導入到VSursPROCESS軟件中,依據高度變化、坡度和坡向等高程信息,結合激光回波的強度信息,在點云影像中進行檢查點定位,并確定點云待檢查點坐標,然后比較待檢查點坐標與外業實測位置之間的偏差,獲得三種解算方式的平面精度. 將得到的坐標與人工布設的檢查點進行比較,結果如圖5 和圖6所示.
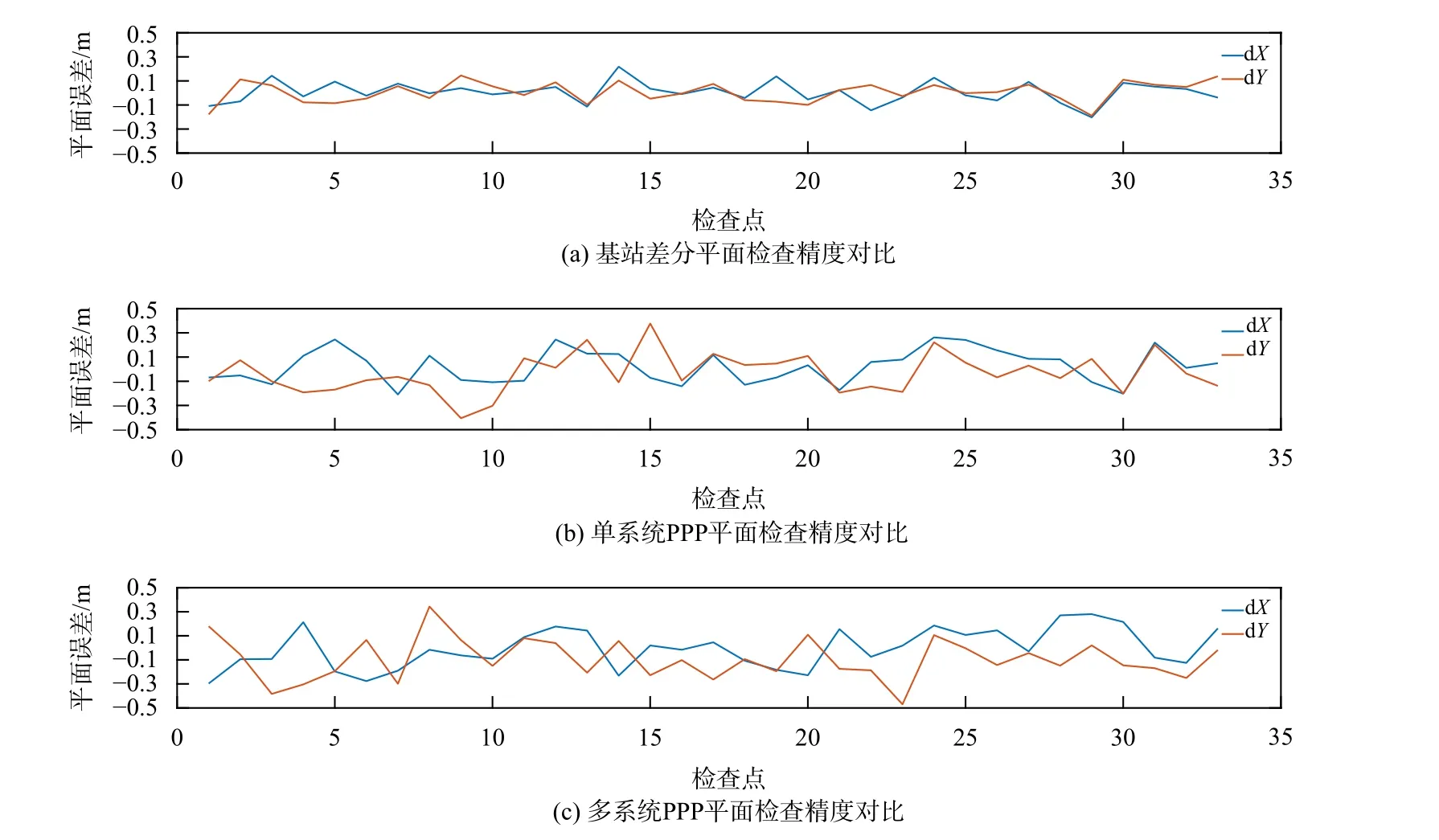
圖5 點云平面檢核精度
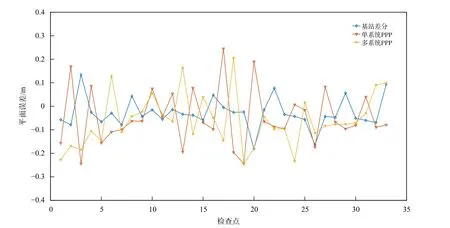
圖6 點云高程檢核精度
由圖5 可知,基站差分平面點云檢核X方向大部分誤差都落在正負15 cm 的范圍內,最大誤差為21 cm,標準差為0.089 5 m;Y方向精度較高,大部分誤差在14 cm 范圍內,最大誤差為22 cm,標準差為0.086 1 m,可見,基站差分精度高,可靠性強,較為穩定. 單系統PPP 在X方向大部分誤差都落在正負30 cm的范圍內,最大誤差為29 cm,標準差為0.164 m;Y方向精度不穩定,大部分誤差在30 cm 內,但最大誤差達到39 cm,標準差達到0.209 m. 多系統PPP 與單系統PPP 相比,精度有提升了約32.5%,在X方向誤差大部分落在20 cm 以內,最大誤差為31 cm,標準差為0.140 m,Y方向誤差大部分落在25 cm 以內,最大誤差為46 cm,標準差為0.164 m. 由圖6 可知,基站差分在高程點云誤差大部分落在10 cm 范圍內,單系統PPP 誤差大部分落在20 cm 范圍內,而多系統PPP 誤差大部分落在16 cm 范圍內,比單系統提升約20%. 三種處理模式下,基站差分的精度最高,多系統PPP 的精度能滿足電力線精細提取的要求,能夠應用于分裂導線等精細吊艙的分類,單系統PPP 的精度基本滿足電力線巡檢的要求,但很難完整的拍攝出絕緣子串,可靠性無法得到滿足,無法適用電力線精細分類.
通過表1 對比結果分析可知:在三種定位方式下檢查點的樣本量一致情況下,基站差分平面檢查點中誤差為0.061 m,高程中誤差為0.063 m;單系統PPP 平面檢查點中誤差為0.092 m,高程中誤差為0.097 m;多系統PPP 平面檢查點中誤差為0.139 m,高程中誤差為0.119 m. 采用PPP 作為機載LiDAR測量系統的定位模式,不僅降低了經濟成本,節省了人力物力,且多系統PPP 完全滿足電力線巡檢的精度,且能應用于精細電力線提取. 因此本文證明了多系統PPP 應用于機載LiDAR 電力線巡檢的可行性.
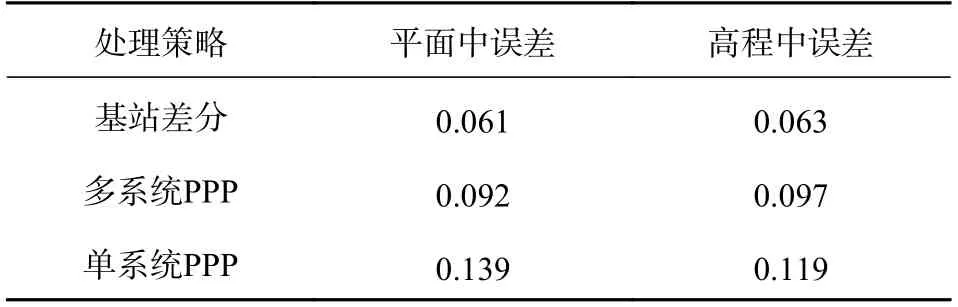
表1 三種處理策略點云精度對比m
4 結 論
本文通過無人機搭載LiDAR 測量系統對江蘇省500 kV 伊上5251 線進行電力線巡檢實驗. 重點分析了基站差分、單系統PPP、多系統PPP 三種不同處理策略下生成POS 數據的精度,實驗數據表明:多系統PPP 在收斂速度及精度方面均優于單系統PPP,且與基站差分的精度相當. 然后根據地面布設的檢核點對POS 數據生成的點云精度進行檢驗,結果表明:單系統PPP 無法滿足精細電力線巡檢,多系統PPP精度滿足精細電力線巡檢. 文中實驗是在觀測條件良好的前提下進行的,在后續的工作中,要在山區、林區、城區等遮擋嚴重的觀測條件下進行實驗,這樣更能突出多系統PPP 的優越性,但在電力線巡檢工作中,多系統PPP 完全滿足精度要求.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
