果實采摘機器人柔性機械手的設計
2021-12-10 06:27:58田寶連
農業技術與裝備 2021年10期
關鍵詞:設計
田寶連
(江西工業職業技術學院,江西 南昌 330000)
1 柔性機械手整體設計
果實采摘機器人柔性機械手主要包含PLC 自動控制模塊、機械手爪構件、機械手連接件、氣動控制部件、主體機械承載機構、報警模塊等6個部分。其中,PLC 自動控制模塊用于組建整個系統的硬件回路,實現對柔性機械手采摘的循環自動控制;機械手爪是完成果實采摘的主要機構;連接件是手爪與氣動控制部件的連接模塊;主體機械承載機構用于裝載整個機械手、PLC 模塊、電源模塊、報警模塊等部件;報警模塊用于對機械手運行中可能出現的過壓、過載、過流等故障進行報警,且出現報警故障,系統會自動斷電。柔性機械手整體設計框圖,見圖1。
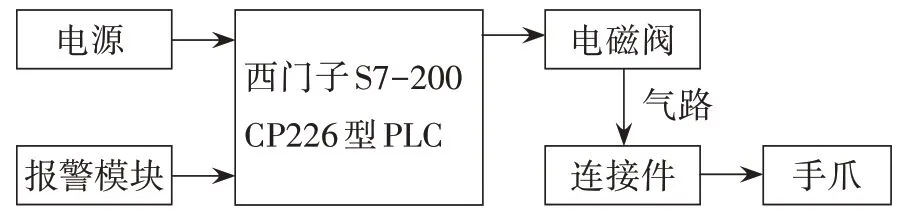
圖1 柔性機械手整體設計框圖Fig.1 The overall design block diagram of flexible manipulator
2 柔性機械手機構設計
2.1 手爪設計
手爪是采摘果實的主要機構,由氣缸組件和手爪組件2個部分構成。其中,氣缸組件是氣路連通和能量傳輸的載體,由于在采摘果實的過程中,機械手需要執行“上升-旋轉定位-抓取果實-下降-旋轉復位-松開果實”系列動作,因此,在氣缸的配置上,包括給手爪“抓取松開”動作提供能量的手指氣缸、給手爪“旋轉定位復位”動作提供氣能的旋轉氣缸、給手爪“上升下降”動作提供能量的旋方型氣缸。手爪組件采用硅膠制作,制作的流程為:采用autoCAD 軟件制作手爪三維模型,應用3D 打印技術制作手爪模具;制作手爪內膽;將內膽放入手爪模具,澆注硅膠,等待手爪固定成型。
2.2 連接件設計
連接件是手爪機構與氣路氣管連接的部件,起固定柔性手爪和保證氣路氣密性的作用。首先,在保證氣路氣密性設計上,通過應用生膠帶固定連接螺栓,在生膠帶的纏繞上務必做到仔細,盡可能多繞幾圈;其次,在柔性手爪固定設計上,在連接件內部頂端設計了3 個氣管氣路與三指手爪連接的通道,并通過螺栓加固連接氣路通道。完成連接件設計后,需要通過反復的采摘試驗測試氣密性和手爪牢固程度,確保手爪在完成果實采摘循環動作中不會出現漏氣、掉落等故障。
2.3 氣動控制設計
氣動控制部分為手爪采摘果實動作提供能量,包含電磁閥、氣動管、磁性開關、緩沖閥、節流閥、消聲器等部件。在結構設計上按照“柔性手爪通過氣管連接氣動電磁閥”“氣動電磁閥連接氣源”的方式構成。此外,在柔性手爪上安裝數個磁性開關傳感器,用來精確檢測手爪采摘果實的狀態。緩沖閥、節流閥可調整氣壓,以確保手爪采摘果實動作的穩定性,消聲器用于降低手爪循環動作時產生的噪音。

圖2 手爪設計圖Fig.2 The design drawing of gripper
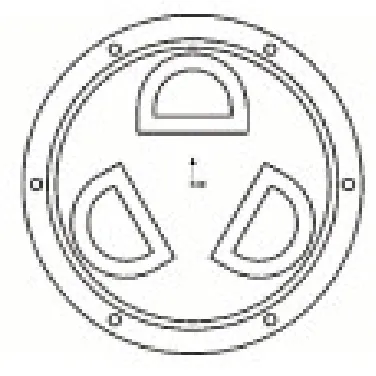
圖3 連接件設計圖Fig.3 The design drawing of connector

圖4 氣動控制連接圖Fig.4 The pneumatic control connection diagram
3 機械手采摘自動控制設計
3.1 PLC電氣控制回路
系統以西門子S7-200型PLC為硬件核心設計,還包括外接繼電器、接觸器、開關、報警指示燈、電氣適配件等。此外,為柔性機械手采摘動作控制分配合適的I/O 地址也是設計的核心項目,具體來說,本系統的輸入電氣地址包括:I0.0(系統啟動開關)、I0.1(系統停止開關)、I0.2(手爪上升限位磁性開關傳感器)、I0.3(手爪下降限位磁性開關傳感器)、I0.3(手爪旋轉限位磁性開關傳感器)、I0.4(手爪抓緊限位磁性開關傳感器)、I0.5(連接件傳感器);本系統的輸出電氣地址包括:Q0.0(手爪上升驅動電磁閥線圈)、Q0.1(手爪下降驅動電磁閥線圈)、Q0.2(手爪旋轉驅動電磁閥線圈)、Q0.6(手爪驅動電磁閥線圈)、Q0.4(報警指示燈驅動線圈)。此外,在具體的PLC電氣控制回路配置上,應在接線中嚴格檢查各傳感器、電磁閥、氣路氣管、輸入輸出控制端子的連接密封情況,確保柔性手爪的循環采摘作業質量。
3.2 循環采摘程序
基于PLC 編譯的果實循環采摘梯形圖程序流程圖,見圖5。整個程序的編譯執行思路為:啟動設備,系統完成復位和自檢,機械手初始位為“下降限位+松開限位+旋轉復位”狀態;機器人柔性機械手運行至果園對應的采摘區域;柔性機械手按照“上升-旋轉到位-采摘抓緊-旋轉復位-下降-松開放果”的循環流程執行采摘作業;采摘過程中若PLC 連接的傳感器檢測到掉果、漏摘、過壓、過載、過流等故障問題,系統指示燈會閃爍,并自動停止采摘作業;若采摘過程中沒有發生故障,柔性機械手會自動循環執行采摘作業,直至技術人員按下停止按鈕,系統才會停止采摘。此外,系統運行過程中若出現停電、故障急停,會導致的機械手未能停在初始位,特編譯了機械手再次通電后的自動和手動復位程序,即:重啟系統后,倘若發現機械手未能停在初始位,技術人員可按下手動復位開關(I0.6)或自動執行SM0.1 初始化程序,使機械手回到初始位置,具體的梯形圖程序見圖6。

圖5 循環采摘程序流程圖Fig.5 The flow chart of circular picking procedure
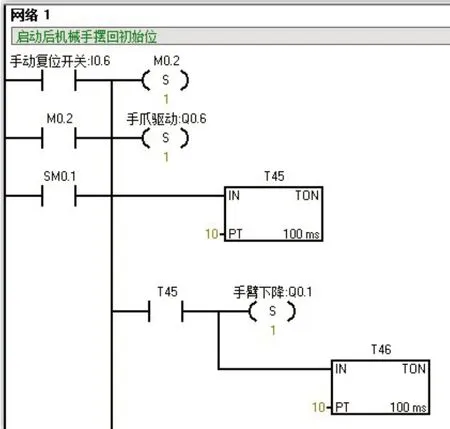
圖6 機械手復位程序Fig.6 The manipulator reset procedure
4 結語
系統完成設計后,在果園中進行了運行試驗,結果顯示:該款機械手針對農作物果實的采摘成功率為100%,沒有出現掉果、漏摘等問題,穩定性、可靠性和應用性良好,在農作物果實自動采摘生產領域具有一定的推廣價值。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
