基于誤差模型的結構光條紋周期數選擇方法
2021-12-07 05:29:54李佳鑫楊時超羅惠方張茵楠
激光與紅外 2021年11期
劉 飛,嚴 謹,李佳鑫,楊時超,羅惠方,張茵楠
(重慶大學機械工程學院,重慶 400044)
1 引 言
相位測量輪廓術是獲取物體形貌的一種重要方法[1]。在相位測量輪廓術測量過程中,首先利用投影儀向被測物體表面主動投影具有一定規律的編碼圖像,如條紋光柵等。再通過拍攝系統拍攝經物體高度調制后的變形條紋圖像,并利用對應的相位展開技術求解物體高度信息。投影編碼圖像的特性會對相位測量輪廓術精度造成較大影響,其中條紋周期數是重要影響因素之一[2-3]。Huntley[2]通過推導說明條紋周期數的增加可以有效抑制相位誤差,但并不能無限增加。基于Huntley等人的研究,杜憲[3]等通過假設法選取十組條紋周期數進行實驗,選出其中一組條紋周期數作為最優條紋周期數,但并未系統給出條紋周期數選擇方法的公式推導與理論模型。Li[4]等通過理論分析,在基于投影儀的非線性響應以及離焦效應的基礎上,推導了相位誤差模型以及三步相移法中的最大相位誤差計算方法,提高了三維測量精度,但并未考慮條紋周期數對于測量精度的影響。
雖然國內外學者對條紋周期數對于相位測量輪廓術精度的影響進行了各自的研究,但基本上仍是基于經驗、試湊等定性的方法,對于定量選擇最優條紋周期數的方法仍比較欠缺。為減小三維重建誤差,提高測量精度,本文基于上述問題提出一種基于誤差模型的相位測量輪廓術條紋周期數定量選擇方法。首先考慮影響相位測量輪廓術測量精度的主要因素,建立綜合相位誤差模型,計算最大相位誤差;其次在基于多頻外差的相位展開算法中,推導條紋周期數與最大相位誤差的約束關系,利用約束方程與最大相位誤差的關系,估計出合適的條紋周期數;最后通過仿真以及實驗證明了本文提出的相位測量輪廓術條紋周期數定量選擇方法能夠有效的降低三維重建誤差。本文提出的方法能實現相位測量輪廓術最優條紋數的定量選擇,將促進相位測量輪廓術的發展與應用。
2 相位誤差模型與條紋周期數約束方程
2.1 相位誤差模型
相位測量輪廓術采用相移技術,通過一系列有一定相位差的條紋光柵進行相位解調。以條紋光柵橫向分辨率W為1024 pixel為例,其中λ為條紋光柵中單個周期所包含的像素點個數,因此條紋周期數K=W/λ,由圖1可知,條紋周期數K為6。
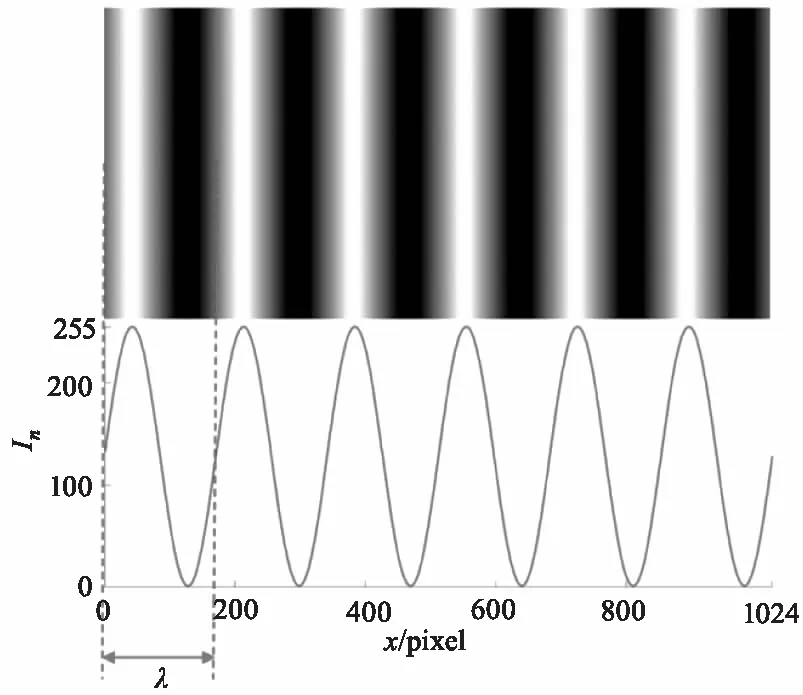
圖1 條紋光柵Fig.1 Fringe pattern
當投影儀將條紋光柵投影至被測物表面,投射的標準N步相移法灰度分布函數為[5]:
In(x,y)=IA+IBcos[φ(x,y)-δn]
(1)
其中,In(x,y)為編碼的理想條紋光柵的灰度分布函數;IA為整幅條紋光柵的平均灰度值;IB為整幅條紋光柵的調制灰度值;φ(x,y)為絕對相位;δn=2π×n/N為第n幅條紋光柵的相移,n=0,1,2,…N-1。
對應的條紋光柵包裹相位φ(x,y)為:
(2)
在相位測量輪廓術中,測量精度受到多方面的影響。通常相位誤差主要來源可分為三種:光柵圖像A/D轉換的離散誤差[3,6],投影儀的非線性響應誤差[4,7-10],投影儀的離焦效應誤差[4,11-13]。采用標準N步相移法時,其相位誤差Δφ為[4]:
(3)

(4)
其中,α∈[0,1]為被測物體表面反射率;Bk為未考慮離焦效應時的k次諧波項系數,可由傅里葉變換求得[4]。T(f)為高斯離焦模型光學傳遞函數,f=K/W為條紋光柵的頻率,K為條紋周期數,W為條紋光柵橫向分辨率。

(5)

(6)

2.2 條紋周期數約束方程
基于多頻外差原理的相位解包裹方法因其測量精度較高而應用較廣[15-16]。本文在基于多頻外差的全頻解相方法上推導條紋周期數與相位誤差的約束關系。由于使用標準三頻四步相移法求解的包裹相位存在四倍頻相位誤差,因此,為保證絕對相位無跳躍性誤差,需要滿足如下約束[5]:
(7)
其中,K1、K2、K3為最高頻、次高頻、最低頻的條紋周期數,即:K1>K2>K3。Δφmax為整幅條紋光柵中的最大相位誤差,該誤差與條紋節距大小無關[5,17]。因此最高頻光柵1、次高頻光柵2和最低頻光柵3的最大相位誤差均為Δφmax。
2.3 條紋周期數與相位誤差對測量精度的影響
在結構光測量系統中,設某空間三維點的坐標為(Xw,Yw,Zw),則三維坐標計算公式為:
(8)
其中,sc,sp分別是相機和投影儀的比例因子。(uc,vc)和(up,vp)是相機和投影儀的圖像坐標,Ac,Ap分別為相機和投影儀的內部參數,Mc,Mp分別為相機和投影儀的外部參數。
該點對應的投影儀圖像坐標up可表示為:
(9)
其中,φ(uc,vc)為該點的絕對相位值;K為條紋光柵的條紋周期數;W為條紋光柵橫向分辨率。
因此,在其他測量環境不變的情況下,投影儀圖像坐標誤差Δup可表示為[14]:
(10)
由式(8)可知,三維坐標的計算與投影儀圖像坐標up有關,投影儀圖像坐標誤差Δup將會引起三維重建誤差。由式(10)可知,當增加條紋光柵的條紋周期數K或者降低相位誤差Δφ時,投影儀圖像坐標誤差Δup均將減小,因此三維重建誤差也將減小。
由式(7)可知,K的選擇與Δφmax直接相關,因此綜合考慮條紋周期數K與相位誤差Δφ對于Δup影響。在K1滿足式(7)的約束條件下,K1取得最大值時,投影儀圖像坐標誤差Δup最小,此時K1的取值即為最優的最高頻條紋周期數。
3 仿真與實驗
采用標準三頻四步相移法,使用MATLAB生成1024 pixel×768 pixel分辨率的條紋光柵進行仿真。基于常用實驗環境的基礎上,在生成的條紋光柵上添加T(f)值為0.886的離焦效應。選取條紋光柵平均灰度值IA=135,條紋光柵調制灰度值IB=85。在經過γ預畸變校正的基礎上,使用MATLAB生成最高頻條紋周期數K1從10~200的條紋光柵進行仿真。

(11)
由式(7)可知,Δφmax與K直接相關。將Δφmax代入式(11),計算得到式(12):
(12)


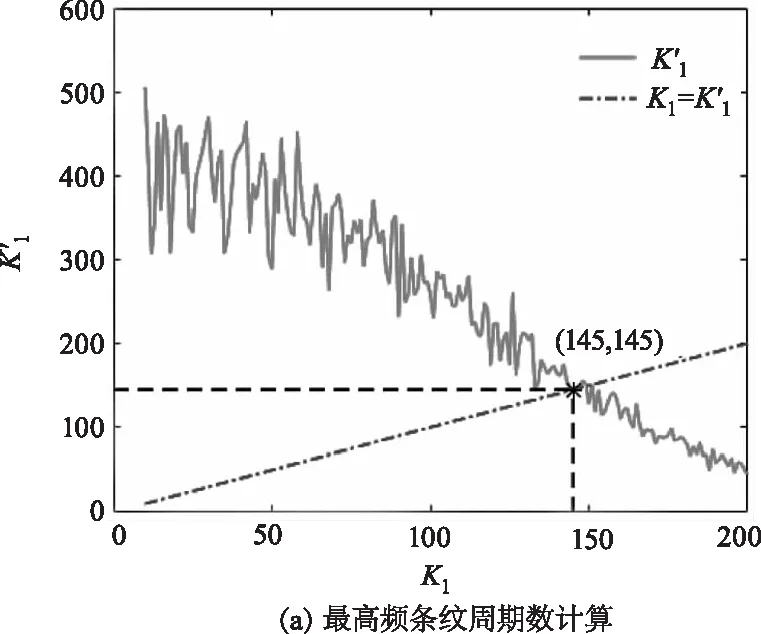

圖2 仿真條件下最優條紋周期數計算Fig.2 Calculation of the optimal number of fringe periods under simulation conditions
為更進一步驗證本文方法的有效性,使用型號為Acer H7850的投影儀,投影分辨率為1024 pixel×768 pixel的條紋光柵進行實驗。使用單個AVT的CCD相機進行拍攝,相機型號為Manta-G505B,相機分辨率為2452 pixel×2056 pixel。采用標準三頻四步相移法。調整標準平板與投影儀之間的距離和焦距,離焦效應光學傳遞函數T(f)最終調整結果的概率最大值為0.886。令條紋光柵平均灰度值IA=135,條紋光柵調制灰度值IB=85,在經過γ預畸變校正的基礎上,使用MATLAB生成最高頻條紋周期數從100~150的條紋光柵進行實驗。




圖3 實驗條件下最優條紋周期數計算Fig.3 Calculation of the optimal number of fringe periods under experimental conditions
4 分析與討論
為驗證上述選擇的條紋周期數是否合理且檢測本文方法的測量精度,本文選擇四組不同的條紋周期數進行對比實驗。第一組為常用的最高頻、次高頻、最低頻分別為70、64、59[14]的條紋周期數;第二組為最高頻、次高頻、最低頻分別為126、120、115的條紋周期數;第三組為經本文方法優化后的最高頻、次高頻、最低頻分別為136、130、125的條紋周期數;第四組為最高頻、次高頻、最低頻分別為146、140、135的條紋周期數。利用標定好的結構光三維測量系統,采用標準三頻四步相移法進行測量,根據標定數據解算三維點云。
使用標準平板進行實驗,在解算出標準平板的三維點云后,對比分析點云數據封裝結果和點云數據最佳平面擬合結果的最大偏差和標準差,其數值如表1所示。

表1 標準平板的重建誤差分類Tab.1 Standard plate reconstruction error details
由表1可知,與第一組條紋周期數(傳統方法)相比,第二組、第三組(本文優化方法)以及第四組條紋周期數實驗結果中的正、負向最大誤差以及標準差均低于第一組條紋周期數的正、負向最大誤差以及標準差。其中,第三組條紋周期數實驗結果中的標準差相較于第一組條紋周期數實驗結果中的標準差,降低了44.4 %。
分析第二組、第三組以及第四組實驗的條紋周期數可知,三組實驗的條紋周期數相近。而應用了本文優化方法之后的第三組條紋周期數,實驗結果中的正、負向最大誤差以及標準差均為三組條紋周期數實驗結果中的最小值。
5 結 論
為了提高相位測量輪廓術的測量精度,本文提出了基于誤差模型的相位測量輪廓術條紋周期數優化方法。首先建立相位測量輪廓術誤差模型,通過誤差模型計算出最大相位誤差。其次推導出最大相位誤差與條紋周期數之間的約束關系。最后根據最大相位誤差與條紋周期數的約束關系,求解最優條紋周期數。實驗表明,本文所選取優化后條紋周期數對比傳統方法條紋周期數的正、負向最大誤差以及標準偏差均有明顯下降。且經本文優化后的條紋周期數,在與其相鄰的條紋周期數中的正、負向最大誤差以及標準偏差均為最小值。因此,本文所提方法能夠有效地求解相位測量輪廓術中所投影條紋光柵的最優條紋周期數,并提高相位測量輪廓術的測量精度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34