基于直線電動機的3-PSS并聯機器人機構設計與仿真分析
2021-11-25 09:08:10朱祺珩尹凝霞魏遠鵬黃恒威王翔宇
機械工程師 2021年11期
朱祺珩,尹凝霞,魏遠鵬,黃恒威,王翔宇
(廣東海洋大學 機械與動力工程學院,廣東 湛江 524088)
0 引言
機器人作為一種新興的可從事多種繁瑣重復或危險工作的自動化設備,不僅減輕了人類的工作強度,而且提高了產品的生產效率和產品精度[1]。為縮短產品生產周期,串聯機器人率先被投入到全自動化的生產流水線[2]。但隨著經濟的快速發展,串聯機器人已無法滿足電子、液晶等小件產品的自動化生產需求,于是并聯機器人應運而生[3]。并聯機器人高精度、高速度且無須較大工作空間等特點使其在實際生產中得到了廣泛應用,因此并聯機器人也成為機器人研究中一個熱門的方向[4]。
澳大利亞的Hunt創造性地提出將Stewart機構作為機器人操作器,并提出了3PRS機構,該機構實現了動靜平臺在平行和非平行兩種情況下的兩轉一移[5]。20世紀90年代后期,伺服技術和工業PC的出現促進了并聯機器人的發展。并聯機器人因結構穩定、承載能力強、累積誤差小和響應速度快等優點廣泛用于并聯機床、航空航天、醫學精密儀器等[6]。1998年,Clavel第一次提出了純平移的三自由度并聯機器人,主要由動、靜平臺組成,靜平臺上面安裝電動機,使運動部件的質量降低,提高了執行末端的速度[7]。因此,三自由度機器人成為新的研究熱點。在三自由度并聯機器人研究進程中,李劍峰[8]分析了3RPS、3RRS等三平移并聯機構的運動學和動力學問題;郝亮亮等[9]開展了3-PRS并聯機構的逆運動學分析,并進行了連桿形成限制條件及球面副和轉動副轉交約束條件的機構空間預估。2011年意大利的Fabrizio Patane[10]針對一種主動桿分別沿等邊三角形的三邊移動的3-PSS并聯機構進行了仿真研究。但三自由度并聯結構還存在不足,如并聯機構的冗余約束和復合驅動、運動空間小,以及大部分并聯機器仍然采用旋轉電動機而限制其運動速度的問題。
本研究利用SolidWorks設計出一種以直線電動機為驅動,定平臺、動平臺及3條支鏈對稱分布的3-PSS并聯機器人結構。直線電動機可直接將電能轉化為直線運動機械能,省去中間轉化機構傳動裝置且易于控制,響應速度更快;同時3條支鏈對稱分布,使其有更好的同向性,有利于機器人整體性的軌跡規劃。
1 3-PSS簡化模型建立
本文研究的并聯機器人的結構由固定不動的靜平臺、3塊相同的連接板、3個相同的平行四邊形運動支鏈和動平臺組成。運動支鏈由4個球鉸對稱連接,運動支鏈與動平臺和連接板與電動機動子均為螺栓連接。直線電動機均勻安裝在靜平臺上,每個連接板與直線電動機動子固連,均由直線電動機動子移動副驅動,3個平行四邊形閉環機構使動平臺在移動過程中始終保持平行,消除動平臺的旋轉。機器人簡化模型如圖1所示。
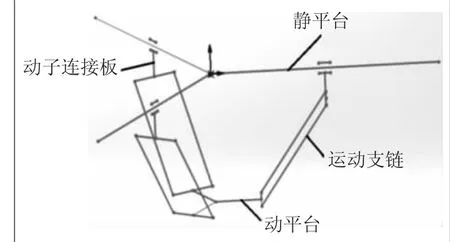
圖1 3-PSS并聯機器人簡化模型
2 3-PSS并聯機器人自由度計算
并聯機構的自由度指在滿足工作要求的條件下末端執行器具有確定的相對運動所需要的最少獨立自由度數,一般由運動副的數目類型、運動支鏈及構件數的相互約束條件決定。對于剛體空間自由度而言,由Grubler-Kutzbach自由度計算公式得

3 并聯機器人運動學分析
3.1 運動學反解
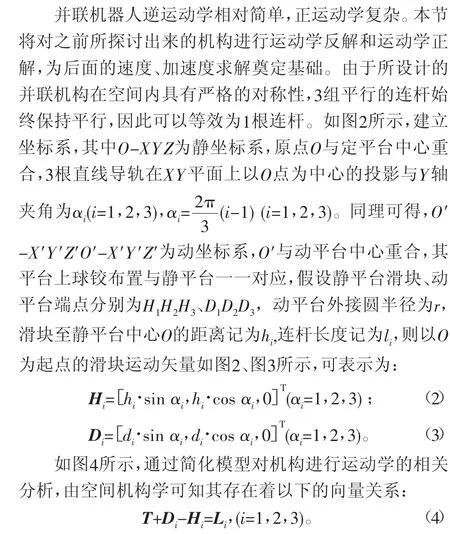

圖2 Hi(i=1,2,3)計算示意圖
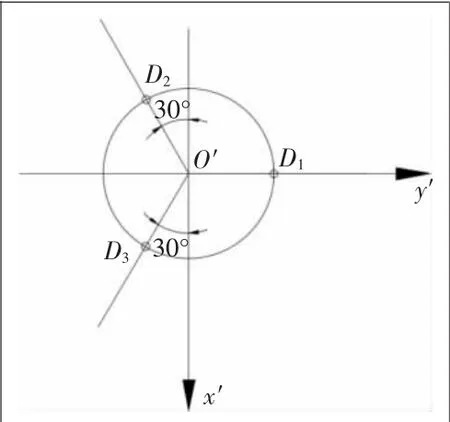
圖3 Di(i=1,2,3)計算示意圖
其中,設置O′在靜坐標系下的坐標為(x, y, z),矢量T表示以靜平臺中心O為起點,動平臺中心O′為終點的向量,T=[x y z]T;將各支鏈桿向量HiDi記為Li。
基于向量點乘原則,又由式(4)可得
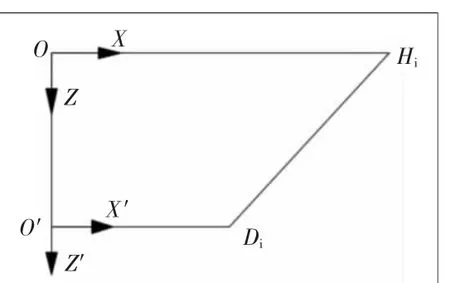
圖4 3-PSS平動并聯機器人坐標系圖

3.2 運動學正解
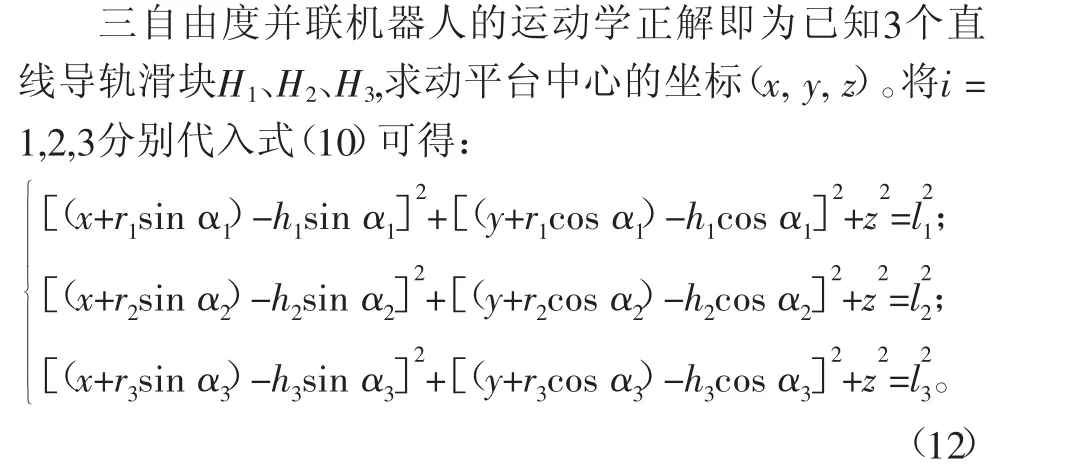
式中:r1=r2=r3;l1=l2=l3。
由式(13)可知,運動學正解存在多組解和解析解,這使得對所設計的3-PSS并聯機器人的控制變得相對簡單,這也是本設計的優點所在。當x、y、z都取正值時,直線導軌滑塊和動平臺滿足坐標系方向。
4 逆動力學建模求解
對上文已經建立的3-PSS物理模型進一步分析,假設三自由度并聯機器人第i個滑塊上受到的驅動力為FHi,方向沿著滑塊運動的方向;滑塊受到靜平臺對它的反力為Ffi;動平臺質心受到的阻力為FD,由于所設計的三自由度并聯機器人始終保持平動運動狀態,則其所受阻力矩為0;第i個導軌滑塊對第i個支鏈的作用力為FHiLi;第i個支鏈對動平臺的作用力為FLi。Jcj為各支鏈桿對其質心慣性張量;Jd為動平臺質心的慣性張量。假設mHi為第i個導軌滑塊的質量;mi為第i個支鏈連桿質量;md為動平臺質量,其中i=1,2,3,對滑塊、動平臺、支鏈連桿建立牛頓方程可得以下幾個方程:

式中:ωj為支鏈桿的角速度矢量,可由上文運動學分析得出;lcihi為質心Ci指向滑塊球鉸的矢量;ldi為動平臺質心指向動平臺球鉸的矢量。
由于動平臺始終進行平移運動,則其動平臺質心力矩為0。對上面各式進行聯立求解,則在已知動平臺質心所受阻力FD情況下可求出FHiLi、FLi。
5 Adams仿真分析
5.1 虛擬樣機模型建立
使用SolidWorks 軟件建立并聯機器人實體三維模型,取桿的初始長度為550 mm,導軌長度為700 mm。將裝配體導入軟件中顯示如圖5所示。

圖5 虛擬樣機實體模型
通過ADAMS軟件中自帶的模型驗證功能,對所建立的模型的自由度數、運動副數目、構件的數目,以及是否存在過約束進行驗證,所建立的樣機模型驗證正確。
5.2 軌跡規劃
本文設計的三自由度并聯機器人擬用于糕點包裝搬運的場合,并基于糕點的生產參數進行軌跡規劃設計。糕點質量為55~60 g,糕點尺寸約為100 mm×60 mm×20 mm,為方便計算,設置糕點與包裝盒中心距離為320 mm,在初始位置向下運動夾取糕點的距離為80 mm,1個盒子可裝2個糕點,另一方向中心距離為80 mm,考慮實際作業要求,對中間軌跡采用圓角矩形路徑,避免拐角點出現沖擊和振蕩。其返回路程無須與初始行程軌跡完全重合,允許拐角不重合,路徑如圖6所示。
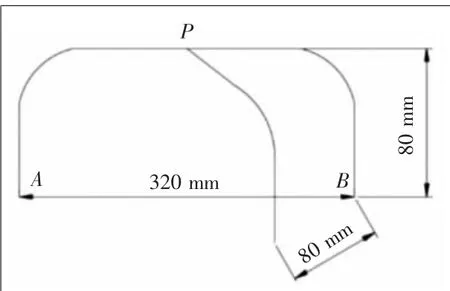
圖6 運動路徑
假設這一過程消耗的時間為T=1 s。在ADAMS軟件中的XOZ平面進行仿真。設置仿真時間為1 s,步數設置200步,選擇上文所設置的Marker點(動平臺質心)為末端執行器執行的關鍵點,對其添加三維驅動。采用STEP函數,計算各部分路徑所消耗的時間。為了確定所設置的函數是否符合預期的運動軌跡曲線,進行驗證操作。末端執行器按照預定軌跡做門字形運動,基本滿足軌跡要求,如圖7所示。
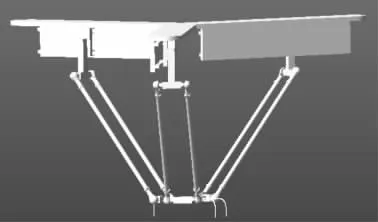
圖7 末端執行器仿真軌跡
調用其繪圖工具,首先將source改為Object,將Filter設置為Constraint,然后在Object選取動平臺,在characteristic(特性)中分別選取速度、加速度和位移,獨立軸選用時間,如圖8~圖11所示。
由圖8、圖9可知,末端執行器在x方向高速運動時,在0.10~0.15 s、0.35~0.40 s、0.60~0.65 s、0.85~0.90 s時間段并聯機器人停止x方向運動,與所設計軌跡函數相對應,末端向下移動、夾取并上升往回走;由z方向速度曲線,其在0.075 s運動,與x方向0.750~0.100 s、0.150~0.175 s、0.325~0.350 s、0.400~0.425 s、0.575~0.600 s、0.650~0.675 s、0.825~0.850 s、0.900~0.925 s時間段共同產生圓弧運動,與上文運動軌跡曲線一致;同時y向曲線初值為0,至T=0.75 s開始向y方向運動。圖9曲線光滑表示末端執行器在高速運動場合運行平穩。
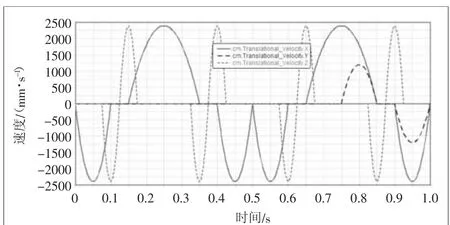
圖8 末端執行器各方向速度變化曲線
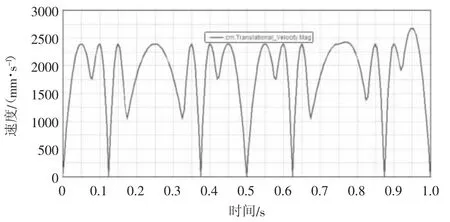
圖9 末端執行器合速度變化曲線
由圖10可知,動平臺加速度曲線比較陡,過渡不平緩,對電動機性能要求較高,但其最大加速度未超過電動機允許的最大加速度,能滿足工作要求。由圖11可知,末端執行器可按照設計軌跡運行,桿件長度、導軌長度及球鉸轉動角度均滿足工作空間要求,其中動平臺x方向移動位移為±160 mm,z方向移動位移為±80 mm,Y方向移動位移為±80 mm,符合函數設計預期結果,位移曲線光滑無突變,運動性能較好。
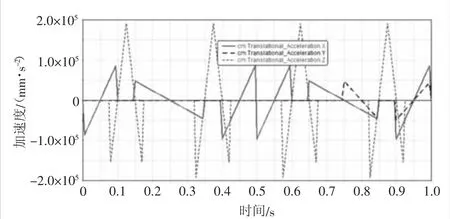
圖10 末端執行器加速度變化曲線
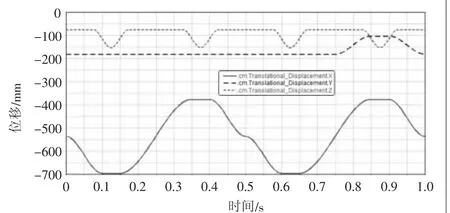
圖11 末端執行器位移變化曲線圖
5.3 運動學反解仿真
由于ADAMS軟件中起始坐標原點與三自由度并聯機器人靜平臺的中心并不重合,再根據實際裝配中球鉸大小及滑塊連接板的長度,出于計算方便,設置柵格間隔為10 mm,以滑塊2為研究對象,采取運動軌跡中的幾點進行運動學的驗證,用MATLAB軟件輔助計算。分別代入坐標值輸入各參數,再在ADAMS軟件中獲取對應各坐標值所對應的滑塊2的數值。各對應值如表1所示。
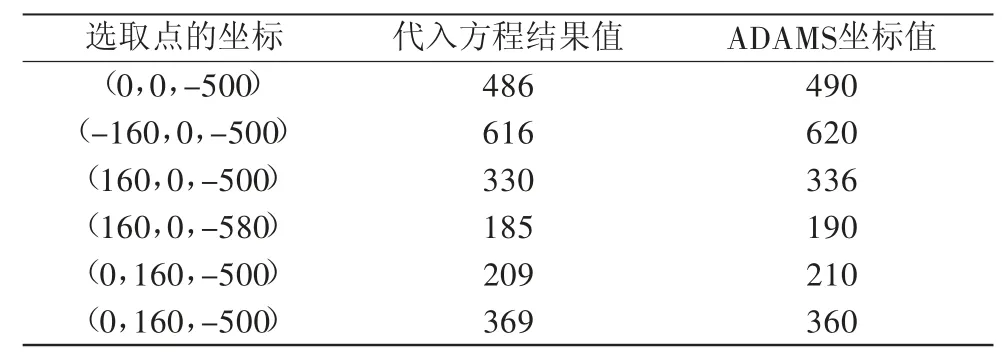
表1 各路徑點對應的滑塊2的運動學逆解方程值和坐標值
所設置柵格間隔為10 mm,對比所選取點在運動學反解方程結果值與在軟件中獲取的坐標值,其中兩者的值大小相同,即可驗證運動學反解方程結論正確。
5.4 運動學正解仿真
在ADAMS中對導軌滑塊設置移動副驅動,給定3個滑塊移動副的位移函數,可繪制曲線觀察函數的運行規律,進而測量動平臺末端點的速度、加速度及位移等曲線,探討其運動規律。由于并聯機器人運動學正解比較復雜,故沒有運用正解方程,而是通過選取在其工作空間內的驅動函數,如下所示:
設置仿真時間t=3 s,步數為600,其各關系曲線如圖12所示。
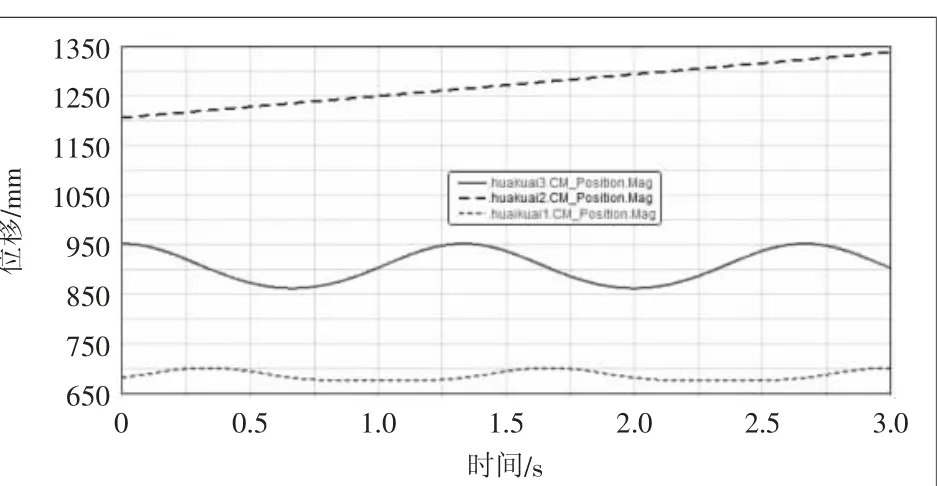
圖12 3個滑塊位移變化曲線
5.5 動力學仿真
設置各零件材料為鋁合金,其動平臺的初始質量測得為1.2 kg,修改其質量,模擬仿真在不同的質量下滑塊驅動力的變化規律。為方便研究,采用上文中3個滑塊的驅動函數。
以滑塊1為研究對象,其在動平臺不同質量的狀態下滑塊的驅動力、速度變化曲線分別如圖13、圖14所示。由圖13和圖14分析可得,滑塊所受的驅動力隨著動平臺質量的增加而增大,當質量呈比例增加時,驅動力也呈比例增加;當驅動函數為正余弦驅動時,滑塊速度平穩無突變。在滑塊速度保持不變的條件下,當所夾取的物體越重,為維持運動狀態不變,所需要的力越大,電動機所消耗的能量越多,對電動機要求也越高。通過此方式研究并聯機器人夾取質量的極限,再借助實驗驗證,可以避免過載情況,保護并聯機器人。
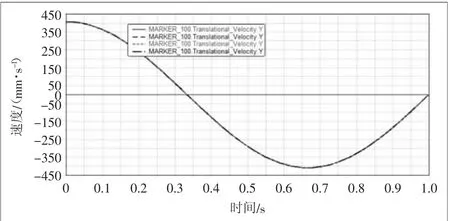
圖13 不同質量下滑塊驅動力的變化曲線
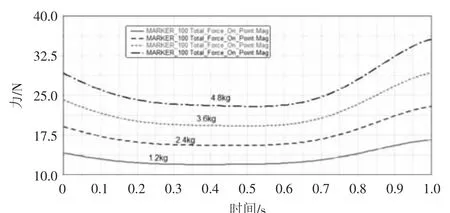
圖14 不同質量下滑塊速度的變化曲線
為進一步探究動平臺材料不同對驅動力的影響,采用3種常見的材料進行虛擬仿真,分別是碳纖維、鋁合金和鋼鐵,如圖15所示。由圖15分析可知,當材料為鋼鐵時,滑塊所受驅動力明顯高于碳纖維和鋁合金。而鋁合金又稍高于碳纖維,故不宜采用鋼鐵為三自由度并聯機器人的材料,可根據經濟成本適當選用碳纖維和鋁合金兩種材料。
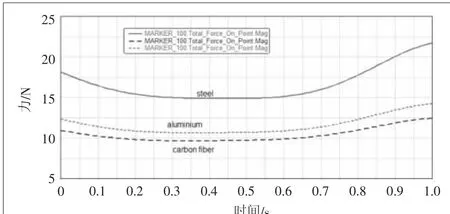
圖15 不同材料下滑塊驅動力的變化曲線
6 結語
1)利用SolidWorks對3-PSS并聯機器人建立簡化模型,計算其自由度,建立其約束方程對運動學進行分析,得出運動學位移逆解與正解模型。
2)分析其各部件受力情況,對其進行了逆動力學分析。
3)對所建立模型自由度進行驗算,對其進行運動軌跡的規劃及運動學和動力學仿真分析。
