新型變徑管道機器人的設(shè)計
2021-11-25 09:08:26常生劉玉良王忠超
機械工程師 2021年11期
常生,劉玉良,王忠超
(浙江海洋大學(xué) 海洋工程裝備學(xué)院,浙江 舟山 316000)
0 引言
油氣管道在各國的能源傳輸方面起著重要的作用[1-2],尤其是我國有著復(fù)雜的油氣管網(wǎng),隨著油氣管道的使用時間變長,地底環(huán)境潮濕和地震等自然災(zāi)害會造成油氣管道的腐蝕、裂紋和斷裂[3],經(jīng)常會出現(xiàn)油氣泄漏污染環(huán)境和安全的問題。為了防止發(fā)生油氣泄漏,造成安全事故,就需要定期地對油氣管道進行安全檢測。如果采用人工挖開進行檢測,不僅檢測效率低,而且成本高[4-5]。目前市面上存在的固定半徑的管道檢測機器人,只適應(yīng)同一管徑的管網(wǎng)檢測,對于不同管徑的管網(wǎng)卻無能為力。變徑油氣管道檢測機器人就可以自由過渡不同管徑,可以一次性檢測不同管徑管網(wǎng),提高了操作的靈活性和檢測效率[6-7]。為了能夠使管道機器人適應(yīng)不同的管徑,國內(nèi)的管道機器人研究者設(shè)計了不同結(jié)構(gòu)的變徑管道機器人,例如:石家莊鐵道大學(xué)的張保真等[8]針對管道機器人對管道半徑的適應(yīng)性,基于升降機式與滾珠絲杠螺母副式變徑機構(gòu),提出了一種滾珠絲杠螺母副三角升降式變徑機構(gòu);上海交通大學(xué)的馬嘉翊[9]研發(fā)了一種運動機構(gòu),采用周向三輪定位全驅(qū)機構(gòu)和雙絲桿曲柄滑塊叉式主動變徑機構(gòu)相結(jié)合,通過對稱式設(shè)計實現(xiàn)管道內(nèi)行走及變徑。
為了更好地實現(xiàn)油氣管道檢測機器人的變徑,本文設(shè)計了一種新型變徑機構(gòu),可以靈活地實現(xiàn)機器人的變徑,以適應(yīng)不同工況下檢測作業(yè)。
1 機器人的整體設(shè)計
1.1 機器人的設(shè)計原則
1)根據(jù)現(xiàn)有的變徑管道檢測機器人,設(shè)計一種新型連桿結(jié)構(gòu)的管道機器人的變徑機構(gòu);2)采用履帶式行走機構(gòu),增大機器人的驅(qū)動性能和運動穩(wěn)定性,便于機器人在油氣管道內(nèi)穩(wěn)定地作業(yè);3)采用傳統(tǒng)的同軸、不同向的齒輪傳動結(jié)構(gòu),帶動連桿結(jié)構(gòu)實現(xiàn)變徑;4)節(jié)約成本,在實現(xiàn)管道機器人的各種功能的前提下,盡可能使機器人的體積小,結(jié)構(gòu)緊湊。
1.2 機器人工作原理
機器人在水平管道中運行時,履帶行走機構(gòu)的橡膠履帶與管道內(nèi)壁接觸,管道內(nèi)壁與橡膠履帶的摩擦力為機器人提供動力。水平管中運行的機器人,兩側(cè)履帶行走裝置不需要張開太大角度,只需要履帶與管道內(nèi)壁接觸,就可以滿足機器人的正常行走。機器人在豎直管道內(nèi)運行時,可以控制變徑機構(gòu)收放以適應(yīng)管道內(nèi)不同管徑的變化,保持變徑管道機器人本體中心線與油氣管道的中心軸線保持平行。就需要機器人的履帶行走機構(gòu)張開180°以抵在油氣管道內(nèi)壁。機器人內(nèi)部的同軸、不同向的齒輪傳動結(jié)構(gòu)工作,電動機正轉(zhuǎn),分布在機器人本體上的圓環(huán)隨著齒輪轉(zhuǎn)動,左右兩邊的圓環(huán)轉(zhuǎn)向相反,帶著履帶固定架向上和向外運動,一方面,抬高了履帶行走機構(gòu),使其與管道直徑平行;另一方面,擴展了機器人的伸展寬度。使橡膠履帶緊緊地抵在管道內(nèi)壁,防止機器人滑落,為機器人向上運動提供足夠的摩擦力。
1.3 機器人的整體組成結(jié)構(gòu)
如圖1所示,通過三維制圖軟件SolidWorks建模零件和裝配變徑管道機器人的三維模型,主要包括機器人主體、圓環(huán)、連接架、履帶固定架、履帶行走機構(gòu)等。

圖1 變徑管道機器人的整體組成結(jié)構(gòu)
2 變徑管道機器人關(guān)鍵結(jié)構(gòu)的設(shè)計
2.1 履帶式行走機構(gòu)
與傳統(tǒng)的履帶式行走機構(gòu)不同,該履帶式行走機構(gòu)沒有直接與機器人本體相連接,而是通過履帶固定結(jié)構(gòu)與本體間接相連,一方面是機器人變徑結(jié)構(gòu)的一部分,另一方面是管道機器人的行走機構(gòu)。使得管道機器人在運動的過程中實現(xiàn)輕松變徑,讓機器人的變徑與行走變得更加靈活。
履帶式行走機構(gòu)中的履帶采用橡膠履帶,由于材質(zhì)的原因,在機器人行走過程中,橡膠履帶會產(chǎn)生比金屬履帶更大的摩擦力,特別是管道機器人運行在有一定傾角或者豎直管道內(nèi)時,橡膠材質(zhì)的履帶的摩擦效果會更顯著。履帶式行走機構(gòu)與油氣管道壁面的接觸面積大,可以為機器人的運動提供足夠的摩擦力,增加機器人的負載能力。但履帶的整體結(jié)構(gòu)比較笨重,需要的轉(zhuǎn)彎半徑大,故在制作過程中要采用輕質(zhì)材料組裝履帶式行走機構(gòu)。履帶式行走機構(gòu)如圖2所示。
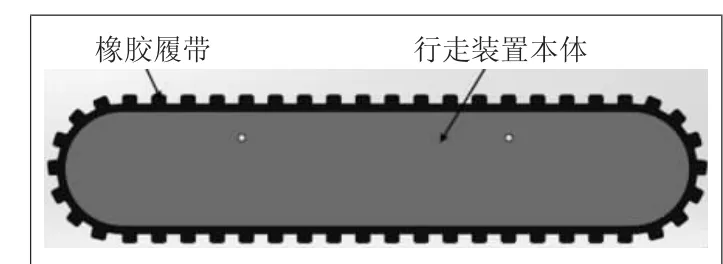
圖2 履帶式行走機構(gòu)
2.2 管道機器人變徑系統(tǒng)
機器人的整個變徑系統(tǒng)如圖3所示,包括機器人的變徑結(jié)構(gòu)和變徑驅(qū)動結(jié)構(gòu)。機器人的變徑機構(gòu)采用了傳統(tǒng)的連桿機構(gòu),機器人主體上有4個帶有齒輪的圓環(huán),這4個圓環(huán)是實現(xiàn)變徑的主要零件,可將4個圓環(huán)理解為連桿機構(gòu)的一部分。通過銷將圓環(huán)、連接架和履帶行走機構(gòu)的固定架聯(lián)接起來。履帶式行走機構(gòu)與履帶行走機構(gòu)固定架類似于另一個連桿。前后各有2個這種連桿機構(gòu),在同軸不同向的齒輪傳動結(jié)構(gòu)的帶動下實現(xiàn)變徑。前后2個連桿機構(gòu)分別與1個齒輪傳動結(jié)構(gòu)相連。在電動機的帶動下,齒輪結(jié)構(gòu)產(chǎn)生不同方向的轉(zhuǎn)動,帶動左右4個圓環(huán)同時向上或向下運動,上面2個圓環(huán)的上下擺動主要是用于調(diào)節(jié)履帶行走機構(gòu)的高度,下面2個圓環(huán)的上下擺動主要是用于調(diào)節(jié)履帶行走機構(gòu)的角度,便于增大履帶與油氣管道內(nèi)壁的接觸面積。
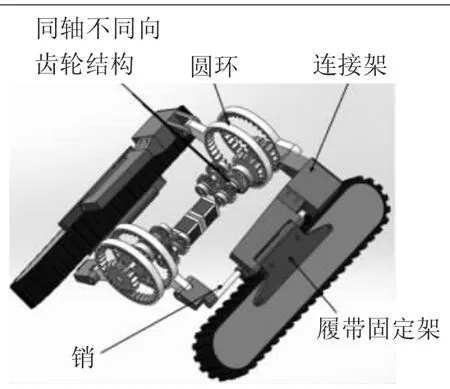
圖3 機器人的變徑系統(tǒng)
3 管道機器人的整體裝配
在對新型變徑管道機器人的設(shè)計過程中,采用的是以本體為中心向周圍擴散的裝配方法,首先要對變徑機器人的各種機械零件和裝配結(jié)構(gòu)進行分析。使用SolidWorks 三維建模軟件完成機器人全部零件的設(shè)計和建模,并通過對各個零件進行合理的配合,組裝成整體機器人的裝配體,如圖4所示。
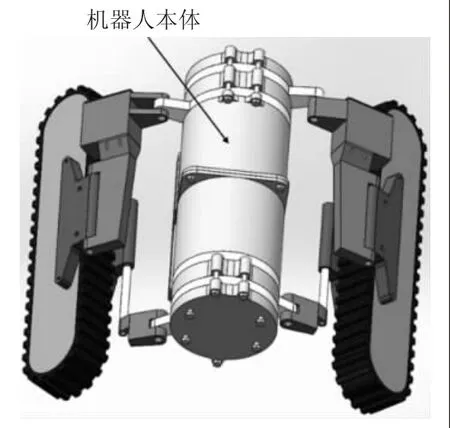
圖4 變徑管道機器人的整體裝配
4 結(jié)論
油氣管道是我國主要的能源輸送方式之一,油氣管道的好壞直接決定了油氣運輸?shù)男省S蜌夤艿罊z測變徑機器人的設(shè)計和研發(fā)決定了油氣管道的檢測質(zhì)量。現(xiàn)在市面上少有用于管道內(nèi)變徑的機器人,因此設(shè)計一種能適應(yīng)不同管徑的管道機器人是一種必要的途徑。對于變徑管道機器人,主要有以下幾個方面的研究:1)主要針對能夠適應(yīng)油氣變徑管道復(fù)雜情況的變徑管道機器人進行研究,設(shè)計了一種新型變徑結(jié)構(gòu),可以適應(yīng)直徑范圍為300~350 mm的油氣管道;2)一種新型的連桿結(jié)構(gòu)的機器人變徑結(jié)構(gòu),連桿結(jié)構(gòu)變徑靈活,能夠完成一定范圍的變徑,并保證機器人的履帶機構(gòu)能夠很好地接觸到油氣管道內(nèi)壁;3)傳統(tǒng)的機械齒輪結(jié)構(gòu),該結(jié)構(gòu)可以實現(xiàn)同軸不同向的轉(zhuǎn)動,設(shè)計靈活,并在一定程度上節(jié)省了空間,減少了機器人的制造成本;4)改造的履帶式行走機構(gòu),兼顧管道機器人的變徑和行走功能,橡膠式履帶可以增大與油氣管的接觸面積,增大摩擦力,提高驅(qū)動能力和負載能力;5)采用三維建模軟件SolidWorks對機器人的各個零件進行設(shè)計、建模和裝配,直觀地體現(xiàn)出變徑管道機器人的整體情況,為搭建實物提供了依據(jù)。雖然本文設(shè)計的是針對油氣管道的變徑機器人,但是經(jīng)過適當?shù)母倪M,該機器人在其他類似的工程管道中也具有很好的實用性。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
