基于VGA接口的視覺輔助駕駛系統投影信號轉換電路設計
2021-11-23 00:49:14曾清德覃舒琳李盛福
時代汽車 2021年21期
曾清德 覃舒琳 李盛福
摘 要:采用單片機AT89C51驅動TFT -LCD控制模塊中的VGA接口,產生標準的顯示信號并進行投影,設計VGA接口信號轉換到模擬液晶屏上顯示的驅動電路,利用 AD9883A芯片強大功能,實現HUD信息顯示。
關鍵詞:TFT-LCD VGA接口信號 AD9883A芯片 驅動電路
1 引言
HUD抬頭顯示系統又稱平視顯示系統,最初運用在戰斗機上,隨著投影技術的發展,HUD這項技術由于獨特的安全輔助性能將會與汽車系統配置結合,用以顯示眾多的信息,除車速和發動機轉速等常規信息外,還包括車外的天氣狀況,車載診(OBD)信息,目的地的搜索以及各種App的服務內容;基于增強現實技術(AR)的HUD還能夠能夠識別盲點并及時發出警告以避免發生交通事故。
薄膜晶體管液晶顯示器(FT-LCD)具有輕薄平坦,耗電量低,沒有輻射而且顯示質量好等特點。VGA是一種標準的15芯顯示屏界面的接口。本設計采用單片機驅動VGA接口信號,產生標準的顯示信號進行投影,基于VGA接口信號轉換到模擬液晶屏上顯示的驅動電路,可以達到高分辨率,快速的顯示通過接口連接的信息以及顯示豐富色彩的圖像等優點,見圖1。
2 電路設計
由單片機AT89C51驅動TFT -LCD控制模塊中的VGA接口具體連接電路圖5-2如所示:
很多的多媒體計算機外屏設備要實現各種色彩多樣復雜的圖像顯示都是通過模擬VGA接口來連接的,通過VGA接口連接R、G、B這三種原色信號還有行、場同步信號是通過數字/模擬轉換器把經過處理后計算機內部生成的以數字信號的形式顯示的圖像轉換而來的,經過這一系列的轉換處理,最后通過電纜傳輸到了顯示設備中。LCD等是一種接收數字信號的顯示設備,所以要想實現LCD的顯示功能,必須在顯示設備中加入相應的A/D(數字/模擬)轉換器,這樣才能使輸出設備出來的模擬信號轉變為數字信號,通過接口生成的數字化的行、場同步信號和顯示數據信號再通過顯示電路的處理,最后才能成為液晶顯示屏可以接手的數據格式。本設計采用TFT-LCD作為投影顯示設備。
3 AD9883A芯片
AD9883A是一個8bit×3通道的模擬數字轉換裝置,最大的轉換速率為140MS/s(百萬次采樣/每秒),就因為它有這么快的轉換率,所以它廣泛被用作各個領域數模信號轉換的裝置。該芯片專門用于采集模擬R、G、B信號,將數字化作為中間轉換器件使用,最常用在視頻信號處理領域。AD9883A不僅有三條通道的視頻數模轉換路徑,而且具極高的性能,RGB三色信號可以通過它在同一時間內被采集,這樣就使得它在信號采集的時間比其他的轉換器快跟多。AD9883AN內部包含了25個寄存器,其中有15個為只讀寄存器,4個為備用寄存器,而剩下的6個寄存器既可讀又可寫;AD9883A初始化和控制都是依靠它內部的寄存器來進行的。如果要確保AD9883A的正常工作,這些寄存器就需要寫入要達到的目標功能的數據信息,而且不同的程序環境,寄存器執行的功能也不同。AD9883A應用在新的環境之前必須進行初始化,否則它輸出的信號就不是很準確。它的初始化是靠它內部的SDA和SCL引腳執行的,時序符合fc總線的時序標準。
AD9883A的基本特點:(1)最大轉換率140MSPS(2)模擬帶寬300M(3)模擬電壓輸入范圍0.5V到1.0V(4)110MSPS時PLL時鐘波動為500ps p-p.電源3.3V(5)實時同步處理(6)熱插拔同步檢測(7)中級嵌位(8)節能模式(9)低能:典型500mW(9)4:2:2輸出格式。
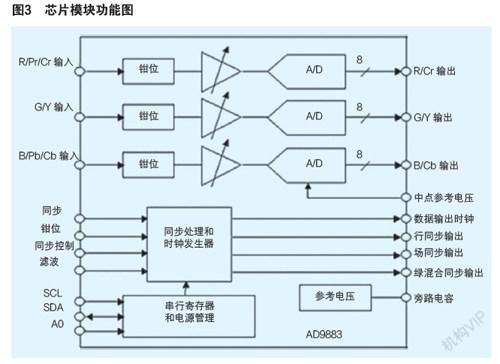
3.1 AD9883A芯片內部功能模塊
數模轉換裝置輸入VGA視頻信號后,信號是不能直接進入轉換器直接進行轉換處理的,進入之前必須要使其輸入的電平滿足A/D轉換模塊的要求,而要滿足其電平的要求,就必須通過先鉗制電位的方式來調整他的直流偏移分量。AD9883A內,有高清的A/D轉換器(高寬帶),八位分配率和110ms/s的轉換速度來對經過處理后電位的模擬視頻信號進行采樣、量化、編碼。最后得到的數字信號通過寄存器調整采樣相位,獲得最好的轉換效果。
通過PLL(同步)設備創建的樣本時鐘可以用作參考時間,A/D共識所需要的樣本時鐘需要通過分離頻率才能獲得,在AD9883A內部,集成了超低抖動鎖相環,就是因為有這個鎖環扣的存在,所以AD9883A在所有的工作模式下,時鐘抖動都低于時鐘的5%。因此,系統能產生穩定清晰的圖像主要依靠的就是AD9883A的穩定性;AD9883A可以接受豐富的圖像格式,是因為它有一個范圍寬度大,可以調節的鎖環口,鎖環口可以根據輸入不同的圖像格式來進行調節其開度,產生的像素點頻率可達到12-140MHz。
AD9883A的同步信號產生模塊可以識別多種同步信號輸入模式,并根據需要靈活設置各種同步信號輸出模式。如果要器件的初始化就要通過I2總線時序來實現。
A/D轉換模塊可以采集形式多樣的VGA圖像格式,但是它有一個弊端就是不能實現圖像格式的自動檢測,要想要實現圖像格式的自動檢測,就必須通過它內部自己提供I2接口進行設置,通過FPGA控制器來對圖像格式的自動檢測。除此之外,VGA圖像在不同的格式下場同步信號的有效脈沖電平是不均勻的。A/D轉換模塊將自動檢測到的輸入場同步信號的極性存儲在內部的寄存器中,而輸入VGA場信號的極性通過讀取存儲在寄存器內的信息來判斷。由A/D轉換模塊輸出的場同步信號實現了輸入場同步信號的反相位。而要判斷是否需要設置A/D轉換器對場信號進行反向處理,則需要在采集前讀取A/D轉換器內部寄存器來判斷當前輸入同步信號的極性,因為FP -GA內部的同步邏輯只支持一種有效電平的場同步信號。
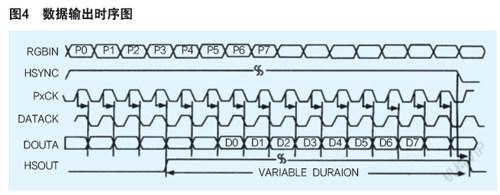
輸入的模擬信號經過鉗制電位處理、亮度和對比度調整、偏置控制后,液晶顯示器所需的數字視頻信號的是在鎖相環產生的采樣時鐘作用下,由AD9883A內部3個高精度高速度的A/D轉換器轉換而來。圖4為數據輸出時序圖,下面通過數據輸出時序圖對圖像的采集過程進行分析,根據時序圖可看到輸出數據時鐘DATACK在一個周期內有下降段和上升段,這個過程里下降沿對應的是其對信號的采集和量化;經過量化后的數據在時鐘上升沿穩定的輸出;經過這一個周期的工作后,圖像數據被接口電路準確的鎖存在DATACK上沿,這樣就實現數字化圖像的采集;這個就是數據的整個采集過程。圖中的HSYNC是用來消除邊沿定時的不確定性的,這樣就保證了像素時鐘和數據的相位不存在延遲等問題,。AD9883A有一個數據輸出通道,如果輸出的數據中存在無效數據的現象就說明數據在輸出之前沒有對通道進行清空,因此,為了保證輸出數據的有效性,在數據輸出之前應對通道進行清空。
4 結語
本項目研究的抬頭顯示系統(HUD)以AD89C51單片機為核心,選擇基于LCD的TFT-LCD的投影技術作為對象,所需要的顯示信息如車速和發動機轉速等,可選擇霍爾傳感器作為信號的獲取端,霍爾傳感器輸出的信號被信息采集電路處理成為方波脈沖信號,才能被單片機識別。本文重點在于選擇VGA標準信號作為連接單片機單元與投影單元的通道,主要設計出以單片機為基礎的基于VGA接口的投影轉換驅動電路,系統選用功能強大AD9883A芯片,實現HUD信息顯示。
(本文來源于廣西科技大學2020年大學生創新項目【202010594244】)。
參考文獻:
[1]余云利.應用于自主可編程邏輯控制器的實時數據庫設計與實現[C].西安電子科技大學,2017.
[2]胡宇,車載抬頭顯示器系統地研究[D].武漢理工大學,2012.
[3]張偉華,基于非晶體硅TFT-LCD顯示系統與控制模塊研究[D],西安理工大學,2008.
